
Direction-of-Arrival Estimation Based on Variational Bayesian Inference Under Model Errors


Abstract
1. Introduction
2. Signal Model
3. Variational Bayesian Formulation
3.1. Sparse Recovery Model
3.2. VBI Algorithm
| Algorithm 1 Proposed algorithm for DOA estimation under model errors |
| Require: Initialize: for do (1) Update and by (19) and (20), respectively. (2) Update and via (29), (33) and (37), respectively. (3) Determine convergence: if break; else update according to (23), (24), (27) and (28). end if end for Ensure: . |
3.3. Cramér–Rao Lower Bound Under Model Errors
4. Results
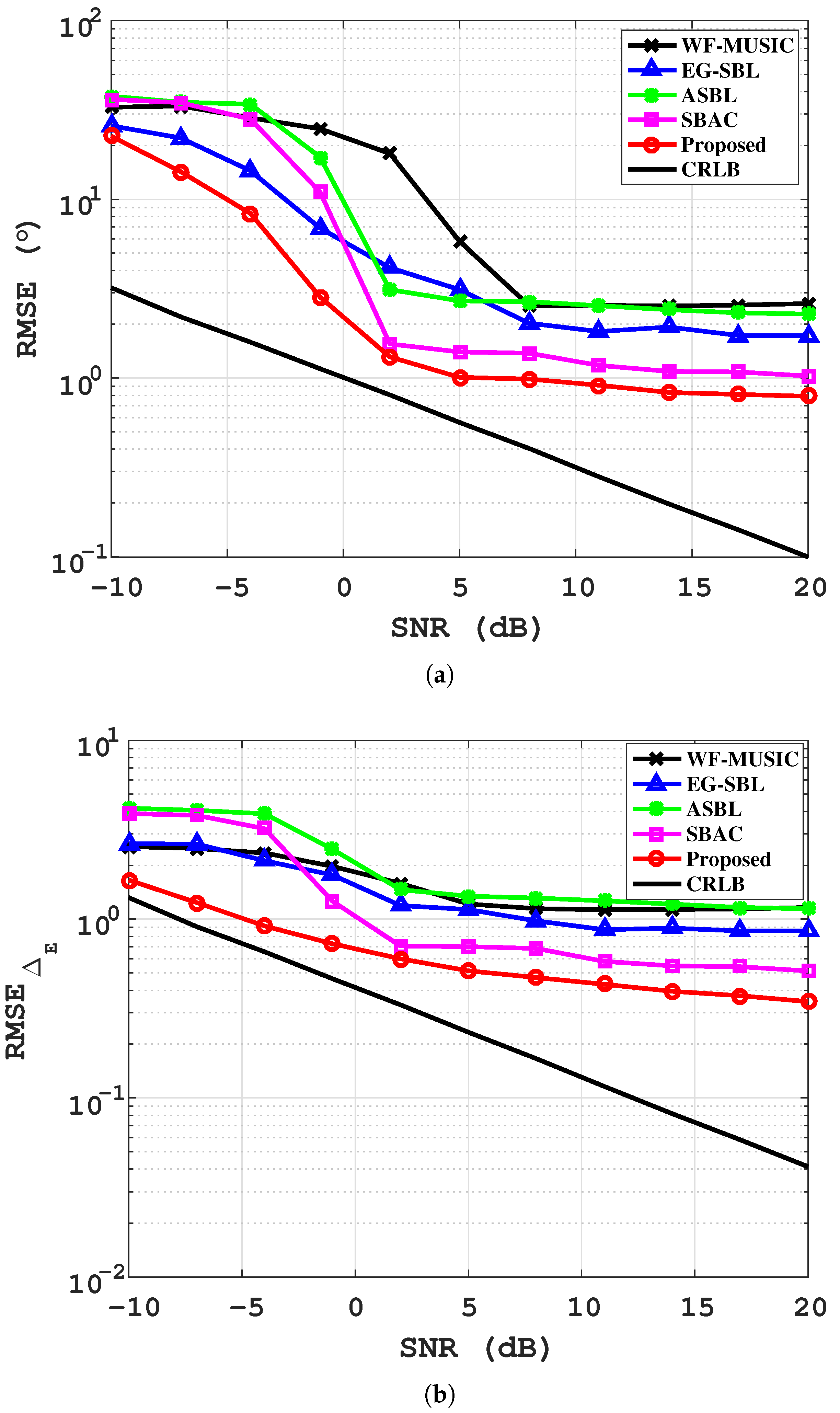
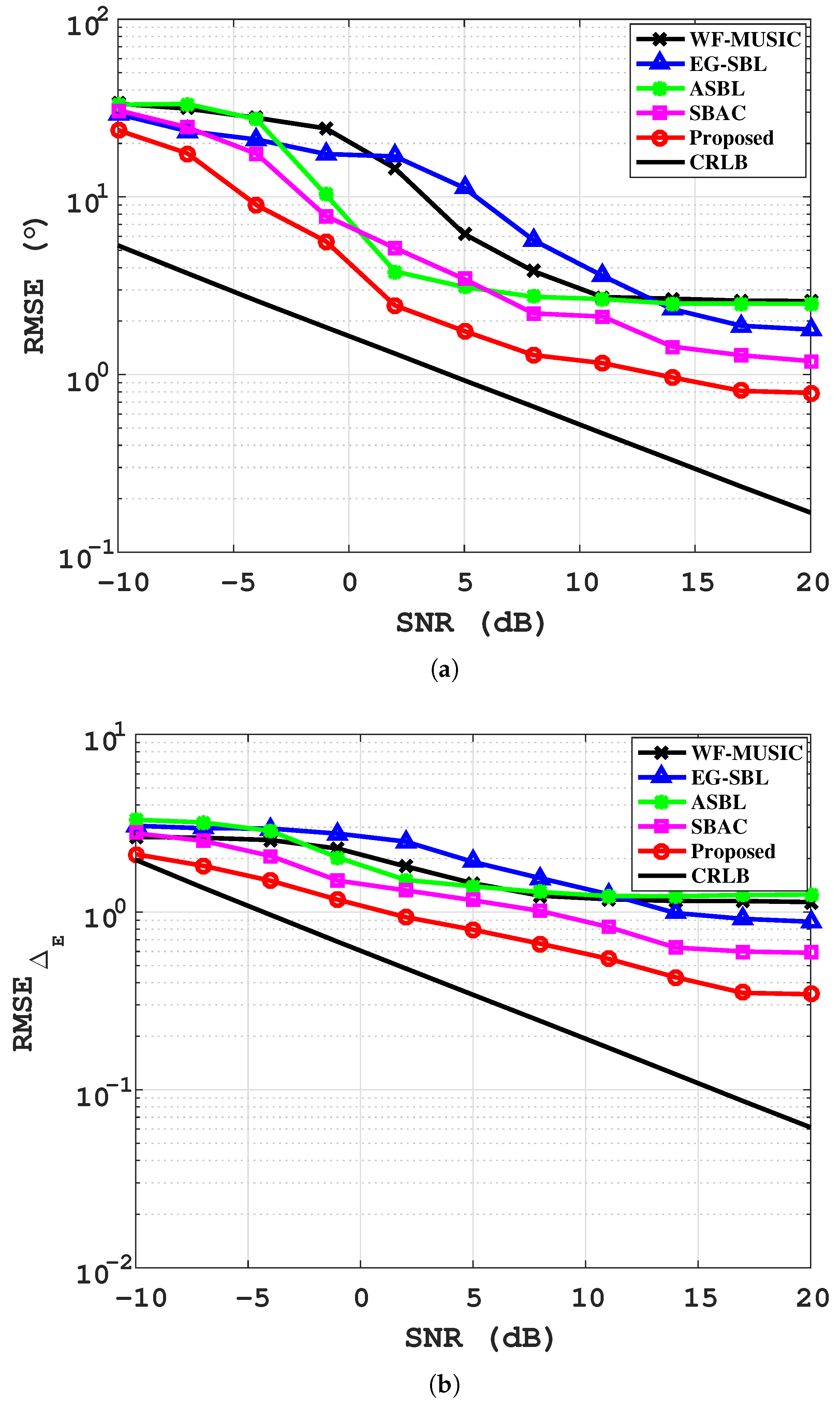
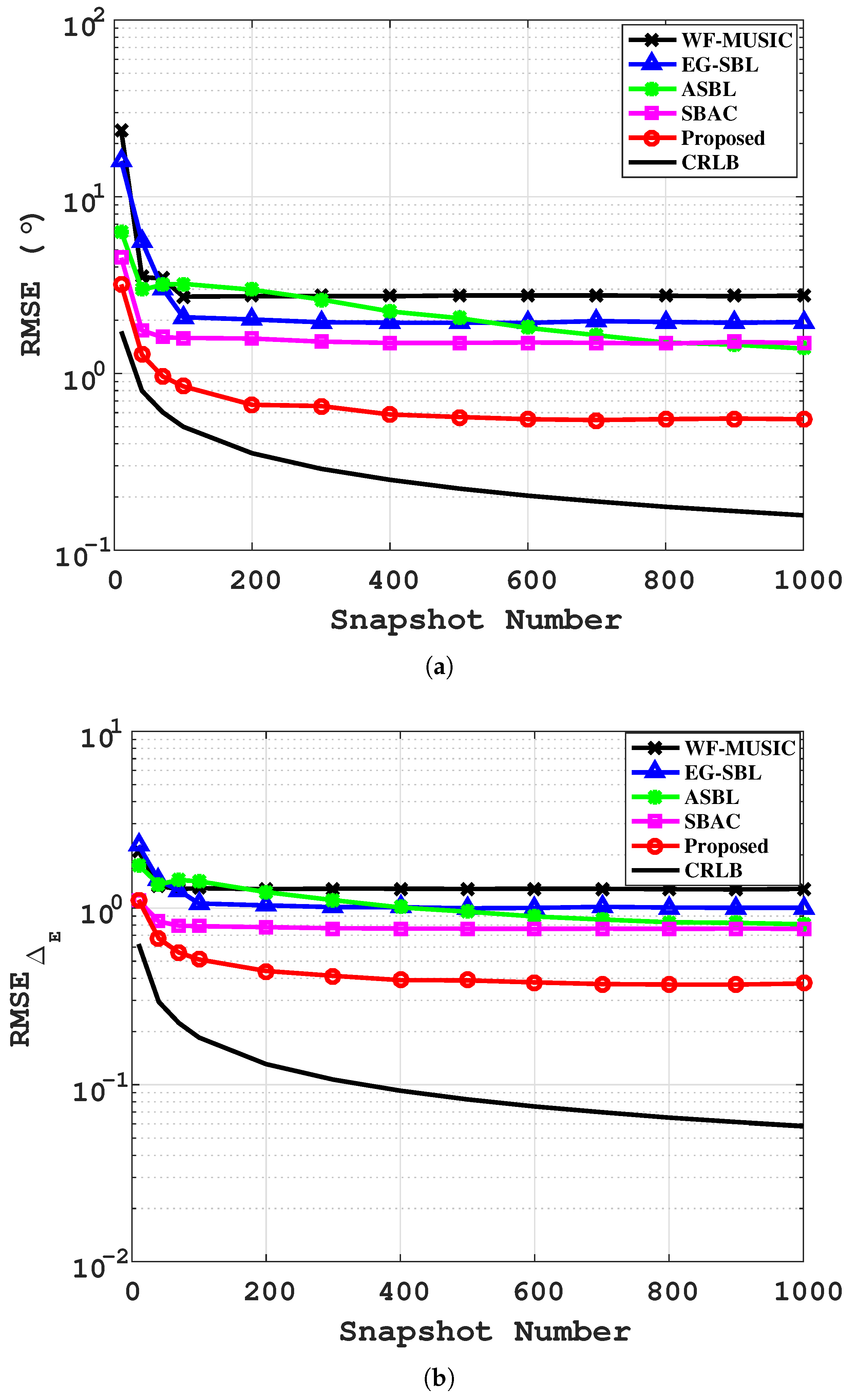
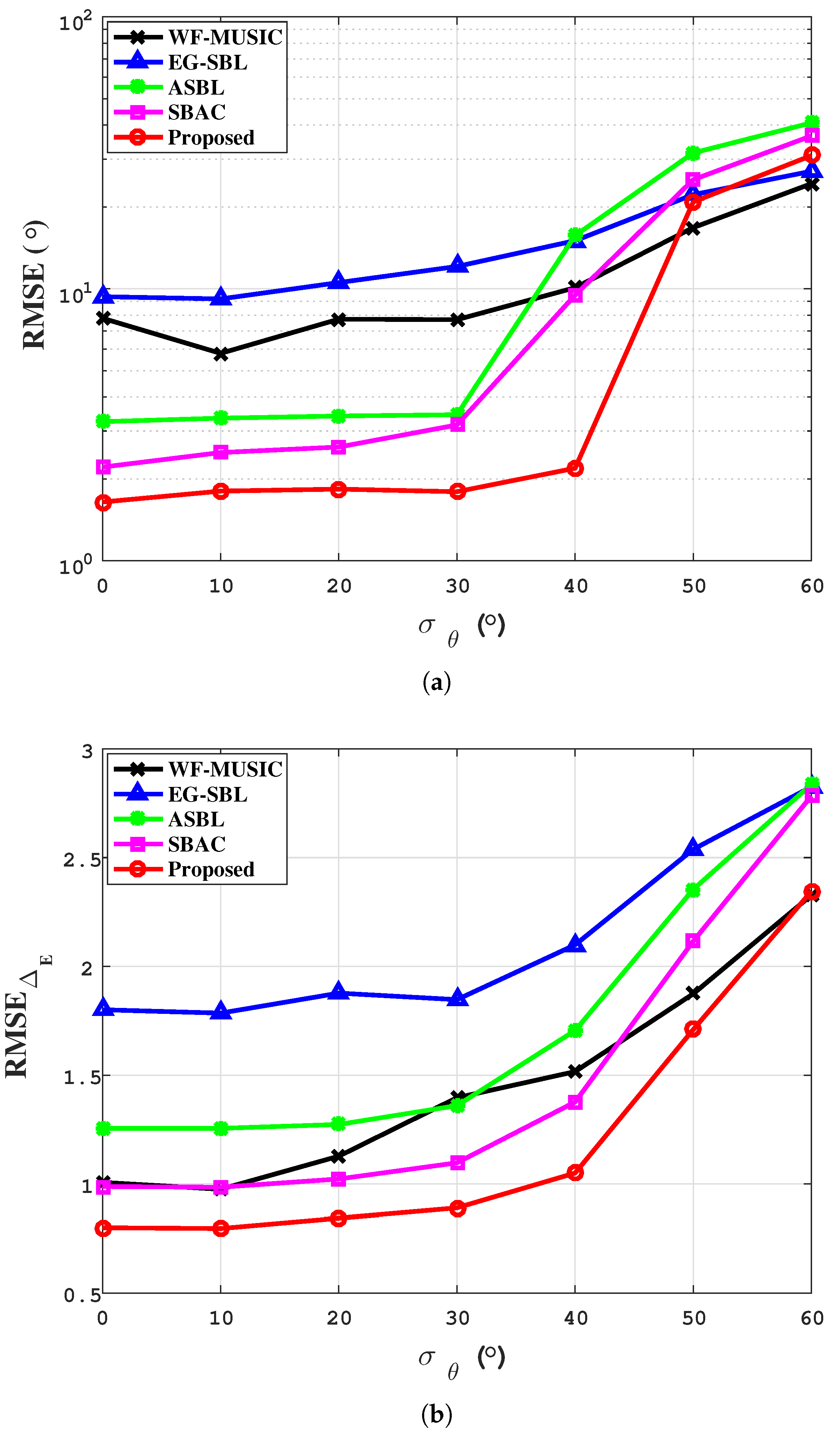
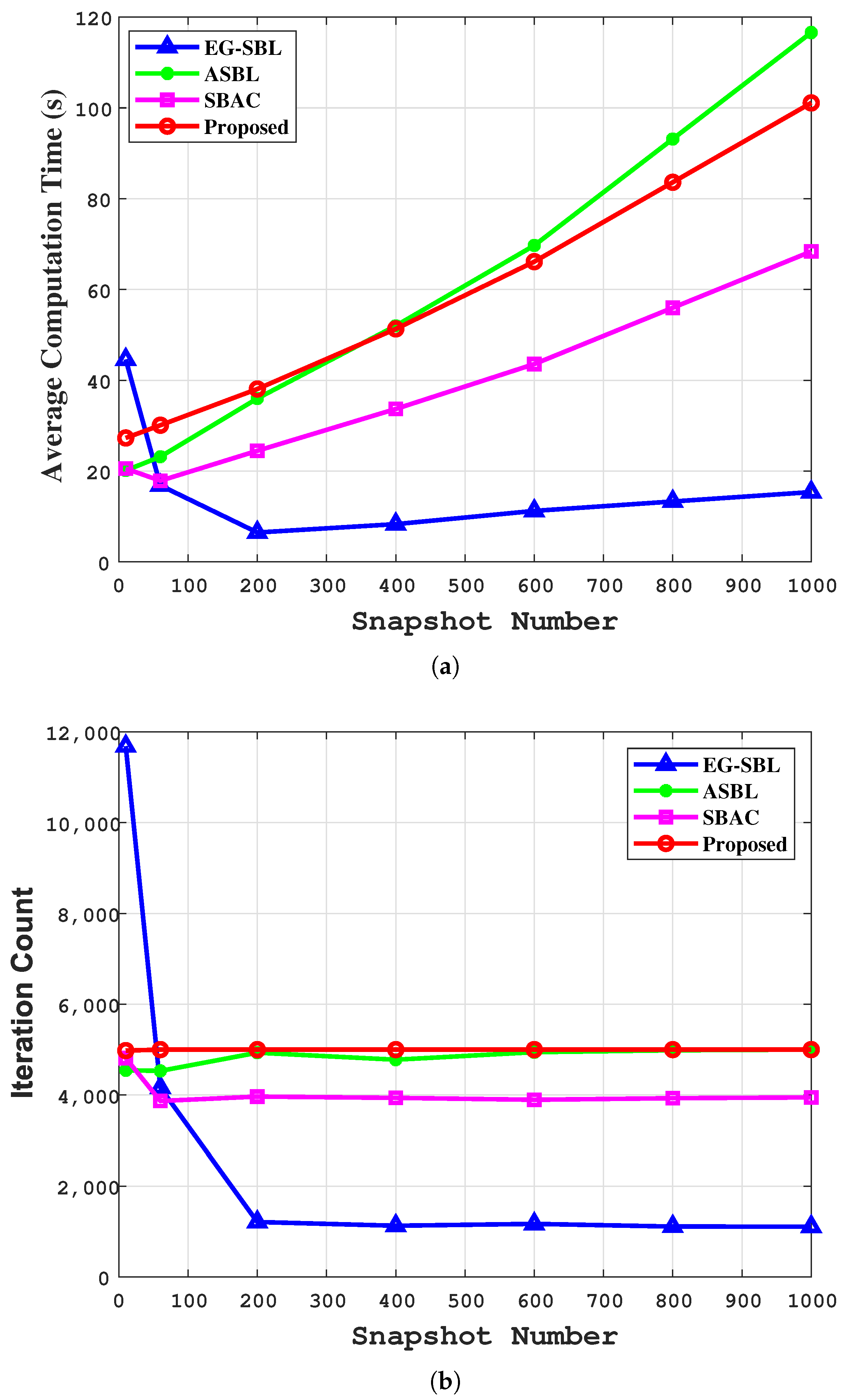
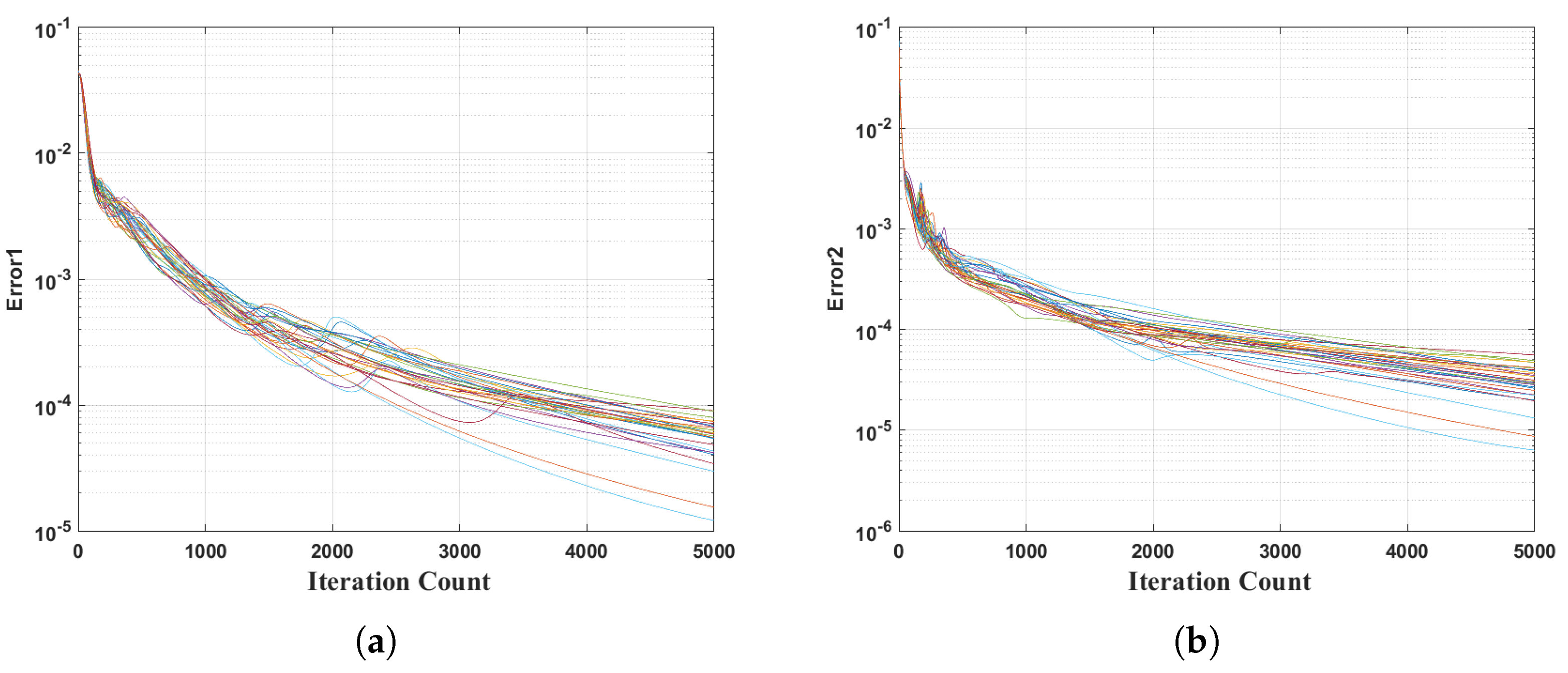
4.1. Simulation Results
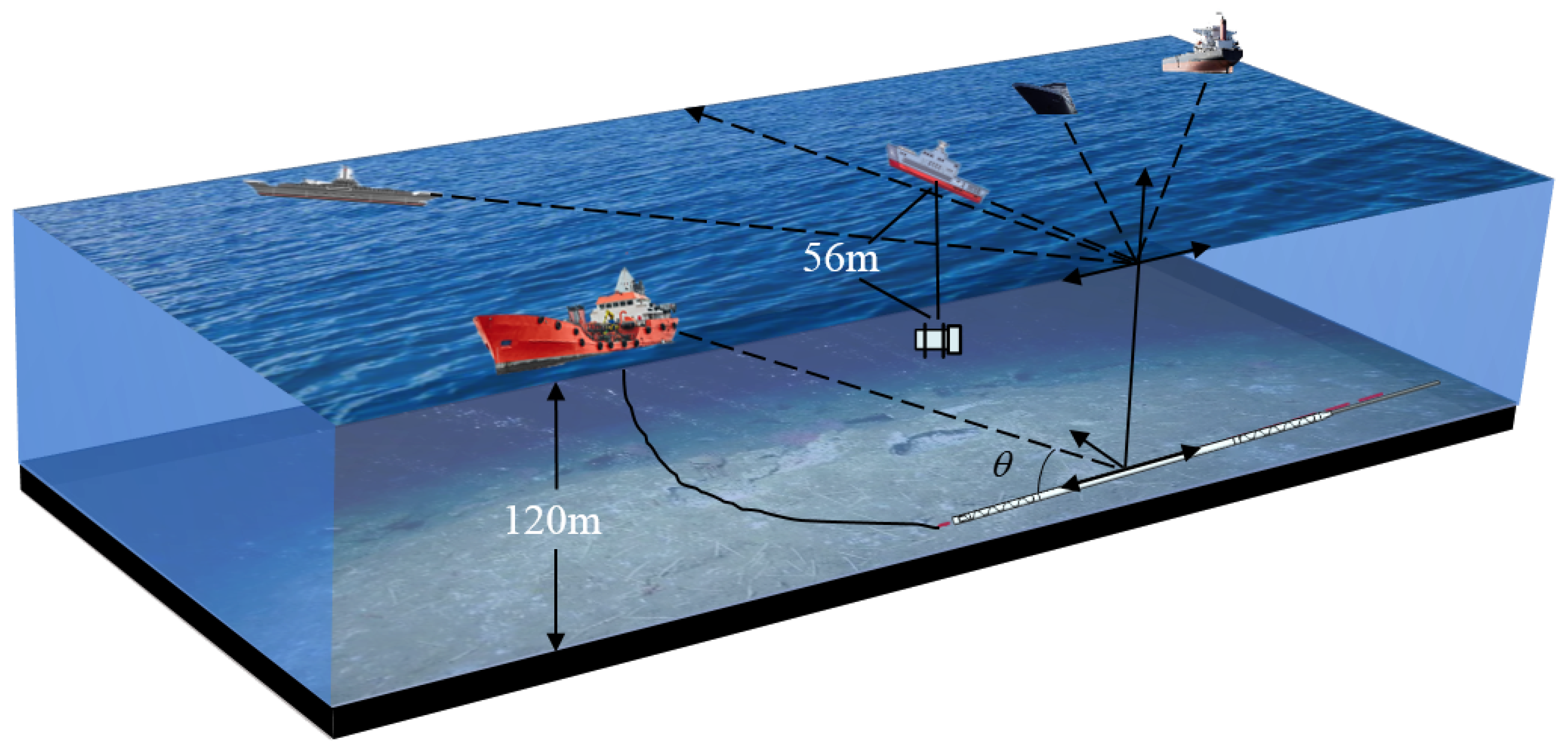
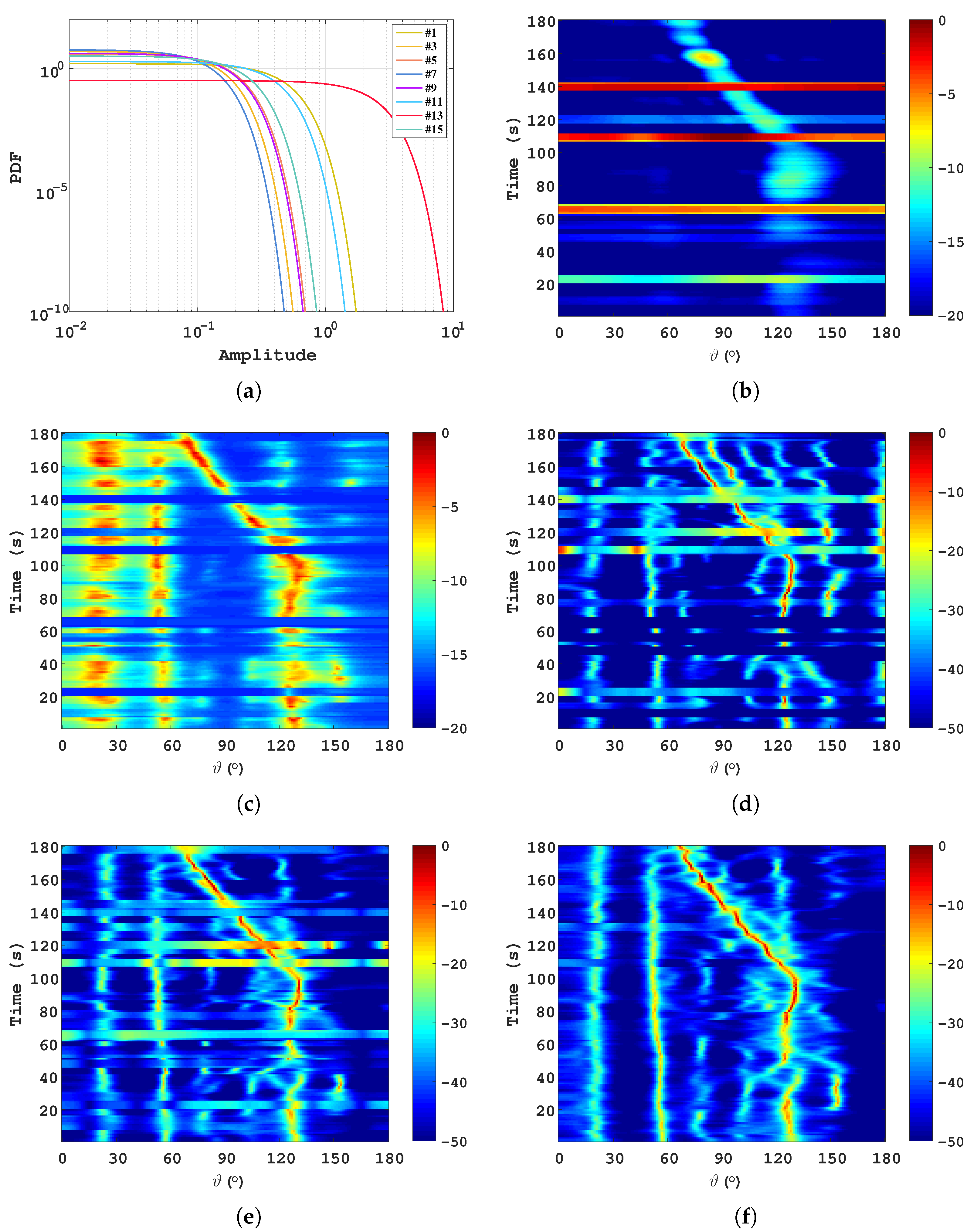
4.2. Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, S.; Wang, H.; Bian, Z.; Chen, S.; Song, P.; Su, B.; Gao, W. A Robust Direction-of-Arrival (DOA) Estimator for Weak Targets Based on a Dimension-Reduced Matrix Filter with Deep Nulling and Multiple-Measurement-Vector Orthogonal Matching Pursuit. Remote Sens. 2025, 17, 477. [Google Scholar] [CrossRef]
- Yazdi, N.; Todros, K. Measure-Transformed MVDR Beamforming. IEEE Signal Process. Lett. 2020, 27, 1959–1963. [Google Scholar] [CrossRef]
- Huang, L.; So, H.C. Source Enumeration via MDL Criterion Based on Linear Shrinkage Estimation of Noise Subspace Covariance Matrix. IEEE Trans. Signal Process. 2013, 61, 4806–4821. [Google Scholar] [CrossRef]
- Blasone, G.P.; Colone, F.; Lombardo, P.; Wojaczek, P.; Cristallini, D. Passive Radar STAP Detection and DoA Estimation Under Antenna Calibration Errors. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2725–2742. [Google Scholar] [CrossRef]
- Li, C.; Liang, G.; Qiu, L.; Shen, T.; Zhao, L. An efficient sparse method for direction-of-arrival estimation in the presence of strong interference. J. Acoust. Soc. Am. 2023, 153, 1257–1271. [Google Scholar]
- Wang, X.; Sun, H.; Zhang, L.; Dong, C.-P.; Guo, L.-X. Unambiguous broadband direction of arrival estimation based on improved extended frequency-difference method. J. Acoust. Soc. Am. 2022, 152, 3281–3293. [Google Scholar]
- Liao, B.; Wen, J.; Huang, L.; Guo, C.; Chan, S.C. Direction Finding With Partly Calibrated Uniform Linear Arrays in Nonuniform Noise. IEEE Sens. J. 2016, 16, 4882–4890. [Google Scholar] [CrossRef]
- Barry, N.; Hazelton, B.; Sullivan, I.; Morales, M.; Pober, J. Calibration requirements for detecting the 21 cm epoch of reionization power spectrum and implications for the SKA. Mon. Not. R. Astron. Soc. 2016, 461, 3135–3144. [Google Scholar]
- Long, R.; Ouyang, J.; Yang, F.; Han, W.; Zhou, L. Multi-Element Phased Array Calibration Method by Solving Linear Equations. IEEE Trans. Antennas Propag. 2017, 65, 2931–2939. [Google Scholar] [CrossRef]
- Weiss, A.J.; Friedlander, B. Eigenstructure methods for direction finding with sensor gain and phase uncertainties. Circuits Syst. Signal Process. 1990, 9, 271–300. [Google Scholar]
- Dai, Z.; Su, W.; Gu, H.; Li, W. Sensor Gain-Phase Errors Estimation Using Disjoint Sources in Unknown Directions. IEEE Sens. J. 2016, 16, 3724–3730. [Google Scholar] [CrossRef]
- Liu, A.; Liao, G.; Zeng, C.; Yang, Z.; Xu, Q. An Eigenstructure Method for Estimating DOA and Sensor Gain-Phase Errors. IEEE Trans. Signal Process. 2011, 59, 5944–5956. [Google Scholar] [CrossRef]
- Mohsen, N.; Hawbani, A.; Wang, X.; Bairrington, B.; Zhao, L.; Alsamhi, S. New Array Designs for DoA Estimation of Non-Circular Signals with Reduced Mutual Coupling. IEEE Trans. Veh. Technol. 2023, 72, 8313–8328. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, L.; Li, Y.; Jing, X.; Truong, T.K. A Sparse-Based Approach for DOA Estimation and Array Calibration in Uniform Linear Array. IEEE Sens. J. 2016, 16, 6018–6027. [Google Scholar] [CrossRef]
- Badiu, M.A.; Hansen, T.L.; Fleury, B.H. Variational Bayesian Inference of Line Spectra. IEEE Trans. Signal Process. 2017, 65, 2247–2261. [Google Scholar] [CrossRef]
- Sun, D.; Fu, X.; Teng, T. A Deep Learning Localization Method for Acoustic Source via Improved Input Features and Network Structure. Remote Sens. 2024, 16, 1391. [Google Scholar] [CrossRef]
- Zhao, L.; Bi, G.; Wang, L.; Zhang, H. An Improved Auto-Calibration Algorithm Based on Sparse Bayesian Learning Framework. IEEE Signal Process. Lett. 2013, 20, 889–892. [Google Scholar] [CrossRef]
- Li, Z.; Huang, Z. Sparse Bayesian learning based DOA estimation and array gain-phase error self-calibration. Prog. Electromagn. Res. M 2022, 108, 65–77. [Google Scholar] [CrossRef]
- Liu, Z.M.; Zhou, Y.Y. A Unified Framework and Sparse Bayesian Perspective for Direction-of-Arrival Estimation in the Presence of Array Imperfections. IEEE Trans. Signal Process. 2013, 61, 3786–3798. [Google Scholar] [CrossRef]
- Lu, R.; Zhang, M.; Liu, X.; Chen, X.; Zhang, A. Direction-of-Arrival Estimation via Coarray with Model Errors. IEEE Access 2018, 6, 56514–56525. [Google Scholar] [CrossRef]
- Chen, Z.; Ma, W.; Chen, P.; Cao, Z. A Robust Sparse Bayesian Learning-Based DOA Estimation Method with Phase Calibration. IEEE Access 2020, 8, 141511–141522. [Google Scholar] [CrossRef]
- Zhou, X.; Fan, B.; Wang, H.; Cheng, Y.; Qin, Y. Sparse Bayesian Perspective for Radar Coincidence Imaging with Array Position Error. IEEE Sens. J. 2017, 17, 5209–5219. [Google Scholar] [CrossRef]
- Yu, D.; Wang, X.; Fang, W.; Ma, Z.; Lan, B.; Song, C.; Xu, Z. DOA Estimation Based on Root Sparse Bayesian Learning Under Gain and Phase Error. J. Commun. Inf. Netw. 2022, 7, 202–213. [Google Scholar] [CrossRef]
- Liao, B.; Chan, S.C.; Huang, L.; Guo, C. Iterative Methods for Subspace and DOA Estimation in Nonuniform Noise. IEEE Trans. Signal Process. 2016, 64, 3008–3020. [Google Scholar] [CrossRef]
- Guo, K.; Zhang, L.; Li, Y.; Zhou, T.; Yin, J. Variational Bayesian Inference for DOA Estimation Under Impulsive Noise and Nonuniform Noise. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 5778–5790. [Google Scholar] [CrossRef]
- Song, J.; Cao, L.; Zhao, Z.; Yang, K.; Wang, D.; Fu, C. Robust Gridless DOA Estimation Using Coprime Array Under Nonuniform Noise. IEEE Trans. Instrum. Meas. 2025, 74, 6502017. [Google Scholar] [CrossRef]
- Liu, Z.M.; Zhang, C.; Philip, S.Y. Direction-of-arrival estimation based on deep neural networks with robustness to array imperfections. IEEE Trans. Antennas Propag. 2018, 66, 7315–7327. [Google Scholar] [CrossRef]
- Abdullah, M.; Li, M.S.; He, J.; Wang, K.; Fumeaux, C.; Withayachumnankul, W. Direction of Arrival Estimation in Terahertz Communications using Convolutional Neural Networks. In Proceedings of the 2024 49th International Conference on Infrared, Millimeter, and Terahertz Waves (IRMMW-THz), Perth, Australia, 1–6 September 2024. [Google Scholar]
- Wu, L.; Liu, Z.M.; Huang, Z.T. Deep convolution network for direction of arrival estimation with sparse prior. IEEE Signal Process. Lett. 2019, 26, 1688–1692. [Google Scholar] [CrossRef]
- Islam, A.; Long, C.; Basharat, A.; Hoogs, A. DOA-GAN: Dual-order attentive generative adversarial network for image copy-move forgery detection and localization. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 4676–4685. [Google Scholar]
- Mylonakis, C.M.; Velanas, P.; Lazaridis, P.I.; Sarigiannidis, P.; Goudos, S.K.; Zaharis, Z.D. Deep Learning Framework Using Spatial Attention Mechanisms for Adaptable Angle Estimation Across Diverse Array Configurations. Technologies 2025, 13, 46. [Google Scholar] [CrossRef]
- Fu, X.; Sun, D.; Teng, T. A high-resolution method for direction of arrival estimation based on an improved self-attention module. J. Acoust. Soc. Am. 2024, 156, 2743–2758. [Google Scholar] [CrossRef]
- Tzikas, D.G.; Likas, A.C.; Galatsanos, N.P. The variational approximation for Bayesian inference. IEEE Signal Process. Mag. 2008, 25, 131–146. [Google Scholar]
- Kvalseth, T. Generalized divergence and Gibbs’ inequality. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; Volume 2, pp. 1797–1801. [Google Scholar] [CrossRef]
- Chen, G.; Su, X.; He, L.; Guan, D.; Liu, Z. Coherent Signal DOA Estimation Method Based on Space–Time–Coding Metasurface. Remote Sens. 2025, 17, 218. [Google Scholar] [CrossRef]
- Pesavento, M.; Gershman, A. Maximum-likelihood direction-of-arrival estimation in the presence of unknown nonuniform noise. IEEE Trans. Signal Process. 2001, 49, 1310–1324. [Google Scholar] [CrossRef]
- Dai, E.; Su, L.; Ge, Y. Cramer-Rao lower bound for frequency estimation of sinusoidal signals. IEEE Trans. Instrum. Meas. 2024, 73, 6503507. [Google Scholar]
- Tian, J.; Yang, M.; Ni, S.; Chao, T. The CRLB for target localization using Gaussian process regression with distance-dependent noise. Measurement 2024, 226, 114127. [Google Scholar] [CrossRef]
- Sang, Y.; Ji, X.; Wei, D.; You, Y.; Zhang, W. Cramer-Rao Lower Bound for Geomagnetic Matching and Its Approximation Method. IEEE Trans. Aerosp. Electron. Syst. 2025. early access. [Google Scholar]
- Guo, Q.; Xin, Z.; Zhou, T.; Xu, S. Off-Grid Space Alternating Sparse Bayesian Learning. IEEE Trans. Instrum. Meas. 2023, 72, 1002310. [Google Scholar] [CrossRef]
- Zhu, J.; Zhang, Q.; Gerstoft, P.; Badiu, M.A.; Xu, Z. Grid-less variational Bayesian line spectral estimation with multiple measurement vectors. Signal Process. 2019, 161, 155–164. [Google Scholar]
- González-Coma, J.P.; Nocelo López, R.; Núñez-Ortuño, J.M.; Troncoso-Pastoriza, F. Beacon-Based Phased Array Antenna Calibration for Passive Radar. Remote Sens. 2025, 17, 490. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | CBF | WF-MUSIC | ASBL | SBAC | Proposed |
|---|---|---|---|---|---|
| RMSE (°) | 1.533 | 1.159 | 0.949 | 0.509 | 0.483 |
| Algorithm | WF-MUSIC | ASBL | SBAC | Proposed |
|---|---|---|---|---|
| Error | 4.163 | 1.585 | 0.292 | 0.194 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Guo, K.; Zhang, J.; Fu, X.; Liu, H. Direction-of-Arrival Estimation Based on Variational Bayesian Inference Under Model Errors. Remote Sens. 2025, 17, 1319. https://doi.org/10.3390/rs17071319
Wang C, Guo K, Zhang J, Fu X, Liu H. Direction-of-Arrival Estimation Based on Variational Bayesian Inference Under Model Errors. Remote Sensing. 2025; 17(7):1319. https://doi.org/10.3390/rs17071319
Chicago/Turabian StyleWang, Can, Kun Guo, Jiarong Zhang, Xiaoying Fu, and Hai Liu. 2025. "Direction-of-Arrival Estimation Based on Variational Bayesian Inference Under Model Errors" Remote Sensing 17, no. 7: 1319. https://doi.org/10.3390/rs17071319
APA StyleWang, C., Guo, K., Zhang, J., Fu, X., & Liu, H. (2025). Direction-of-Arrival Estimation Based on Variational Bayesian Inference Under Model Errors. Remote Sensing, 17(7), 1319. https://doi.org/10.3390/rs17071319