Multi-Temporal Polarimetric RADARSAT-2 for Land Cover Monitoring in Northeastern Ontario, Canada


Abstract
:1. Introduction
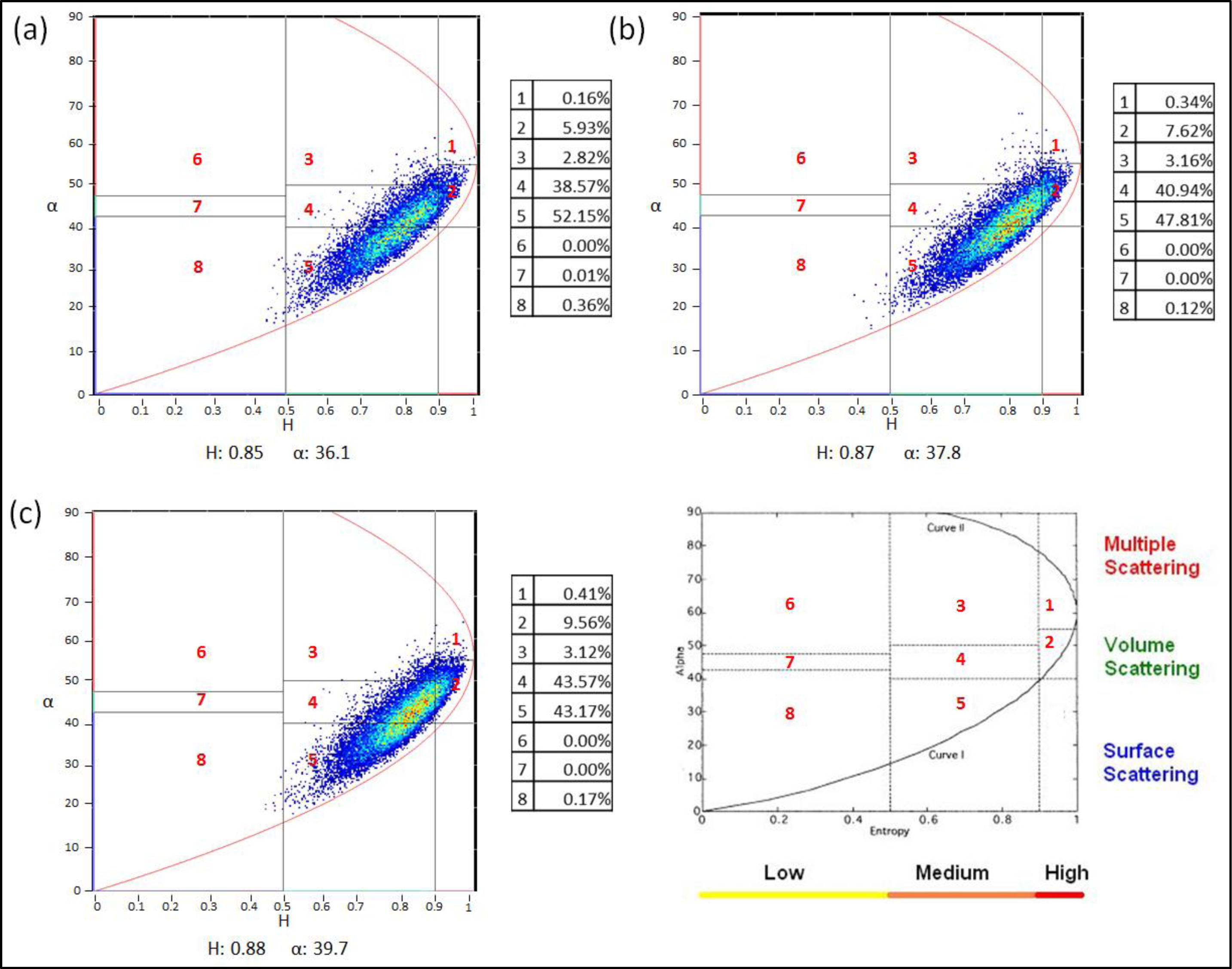
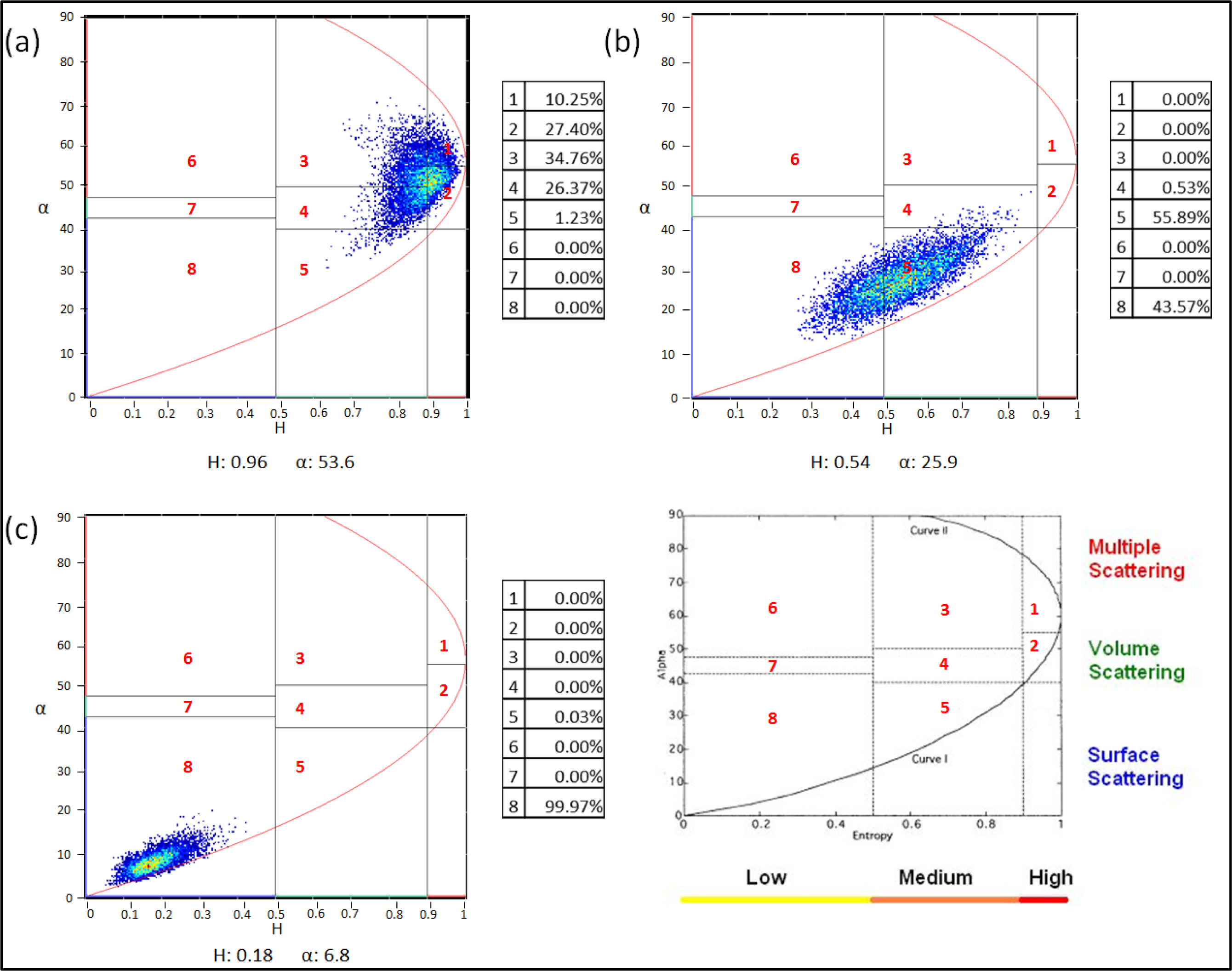
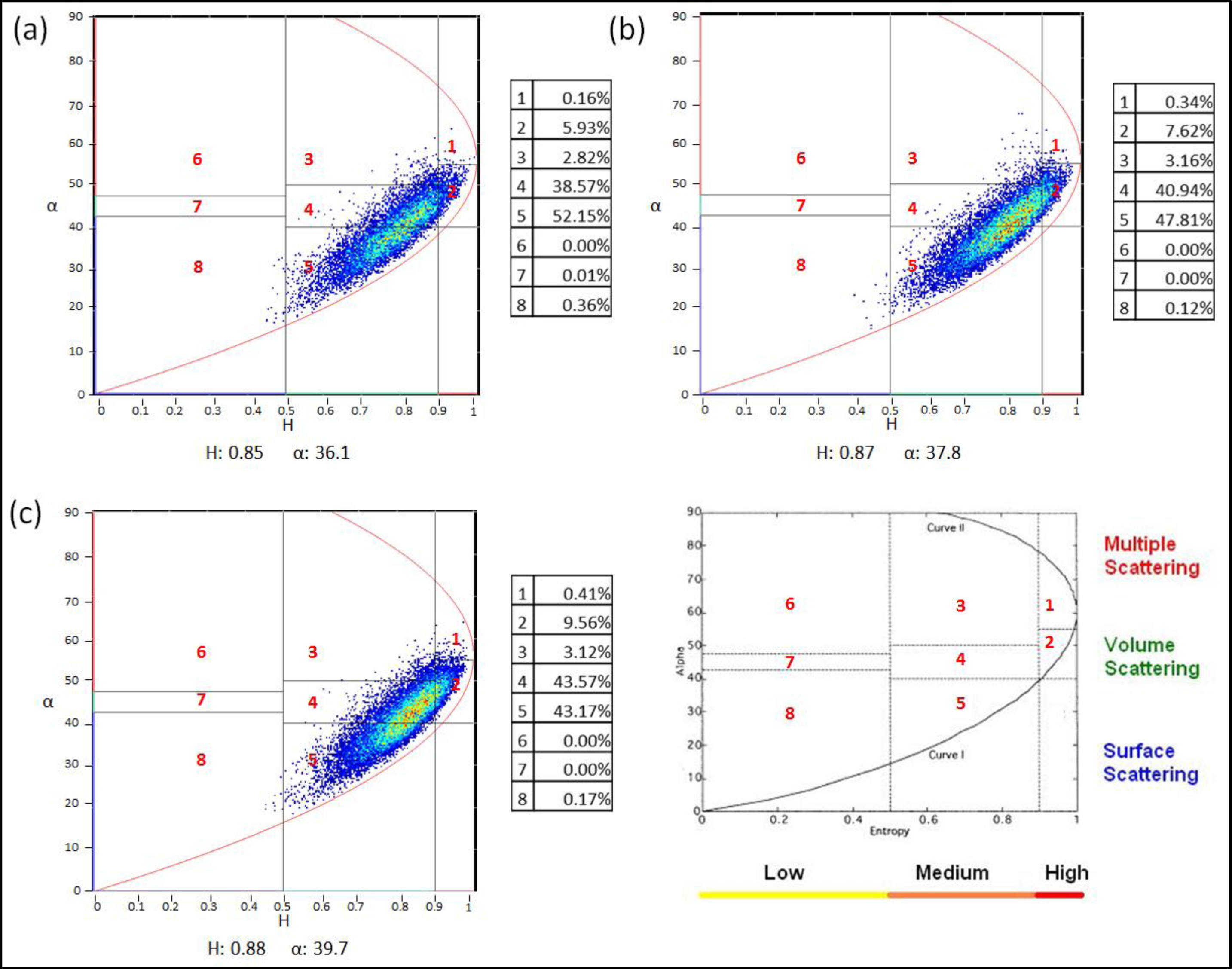
- Zone 8: Low entropy; smooth surface scattering.
- Zone 7: Low entropy; dipole scattering.
- Zone 6: Low entropy; multiple scattering.
- Zone 5: Medium entropy; rough surface scattering.
- Zone 4: Medium entropy; vegetation scattering.
- Zone 3: Medium entropy; multiple scattering.
- Zone 2: High entropy; vegetation scattering.
- Zone 1: High entropy; double-bounce scattering.
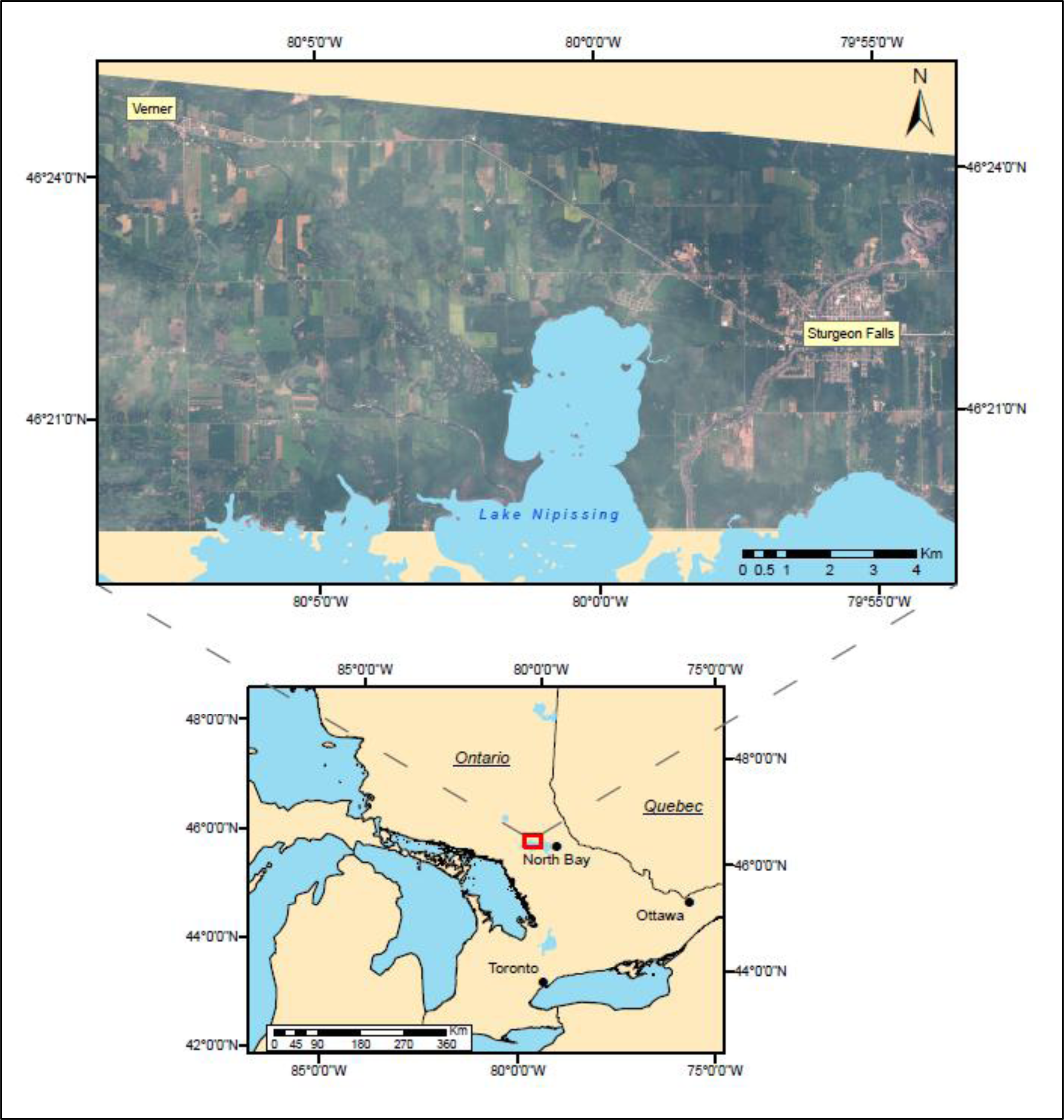
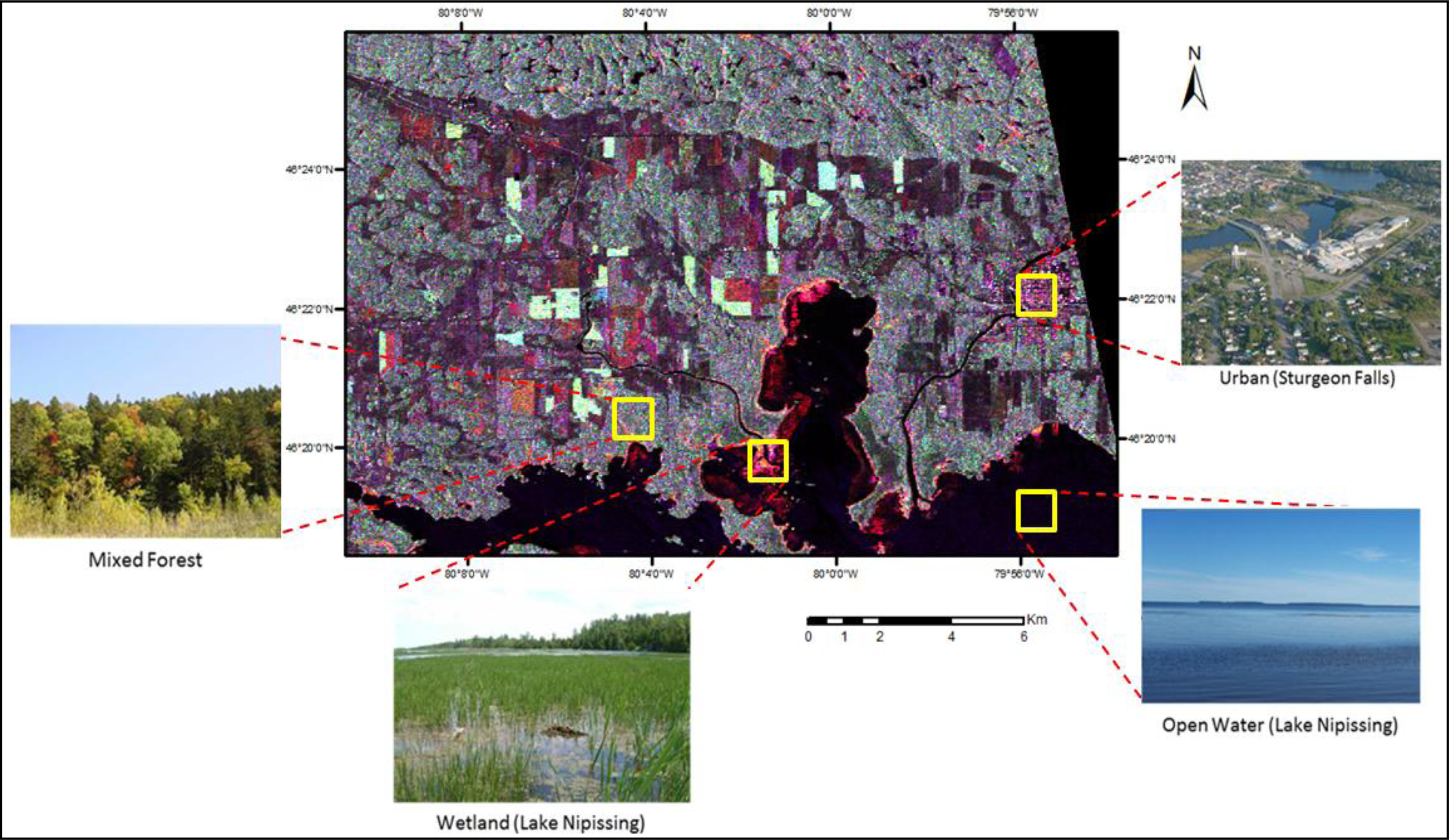
2. Study Area
3. Land Cover Types
4. Methodology
4.1. Satellite Imagery
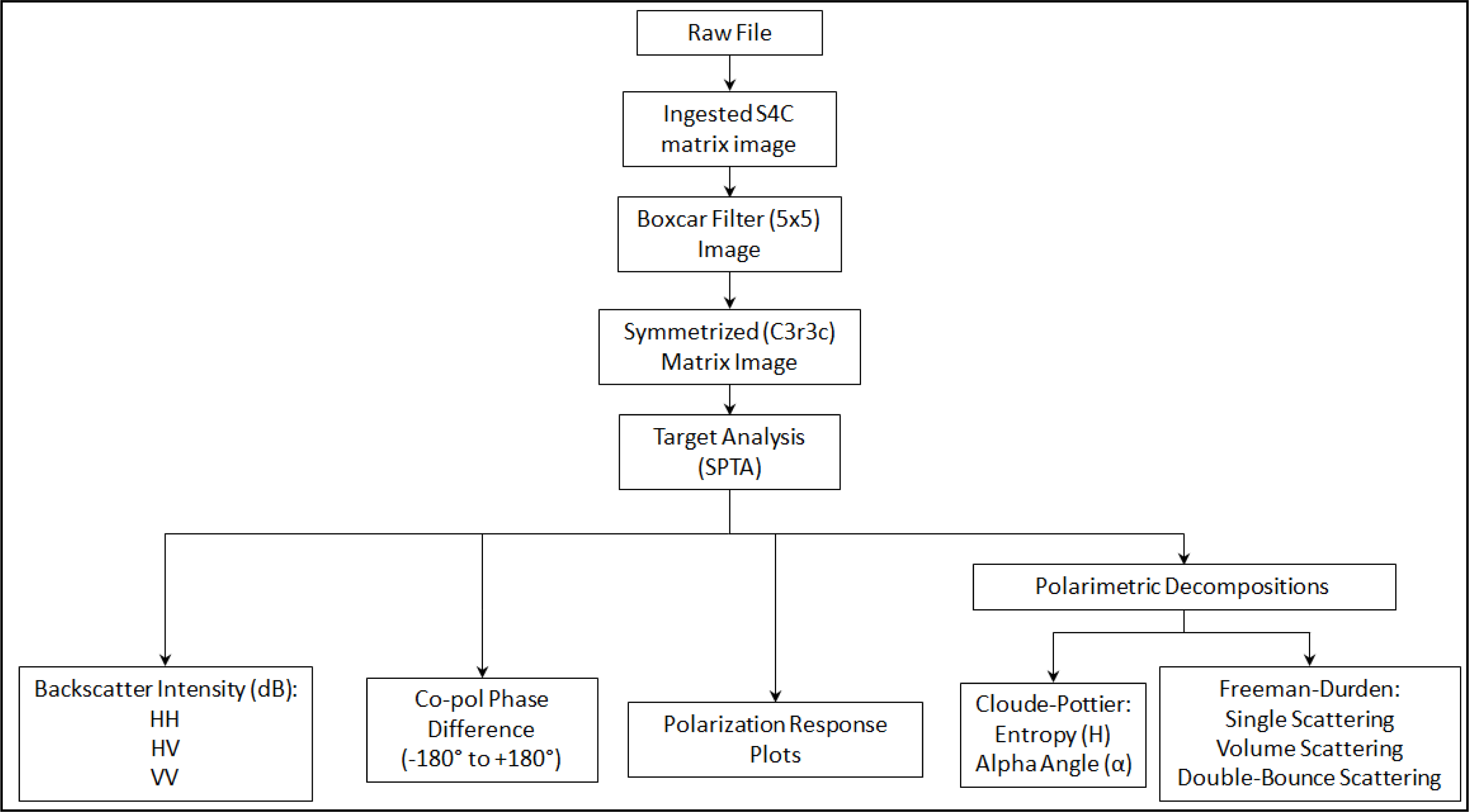
4.2. Data Processing
4.3. Data Extraction
5. Results and Discussion
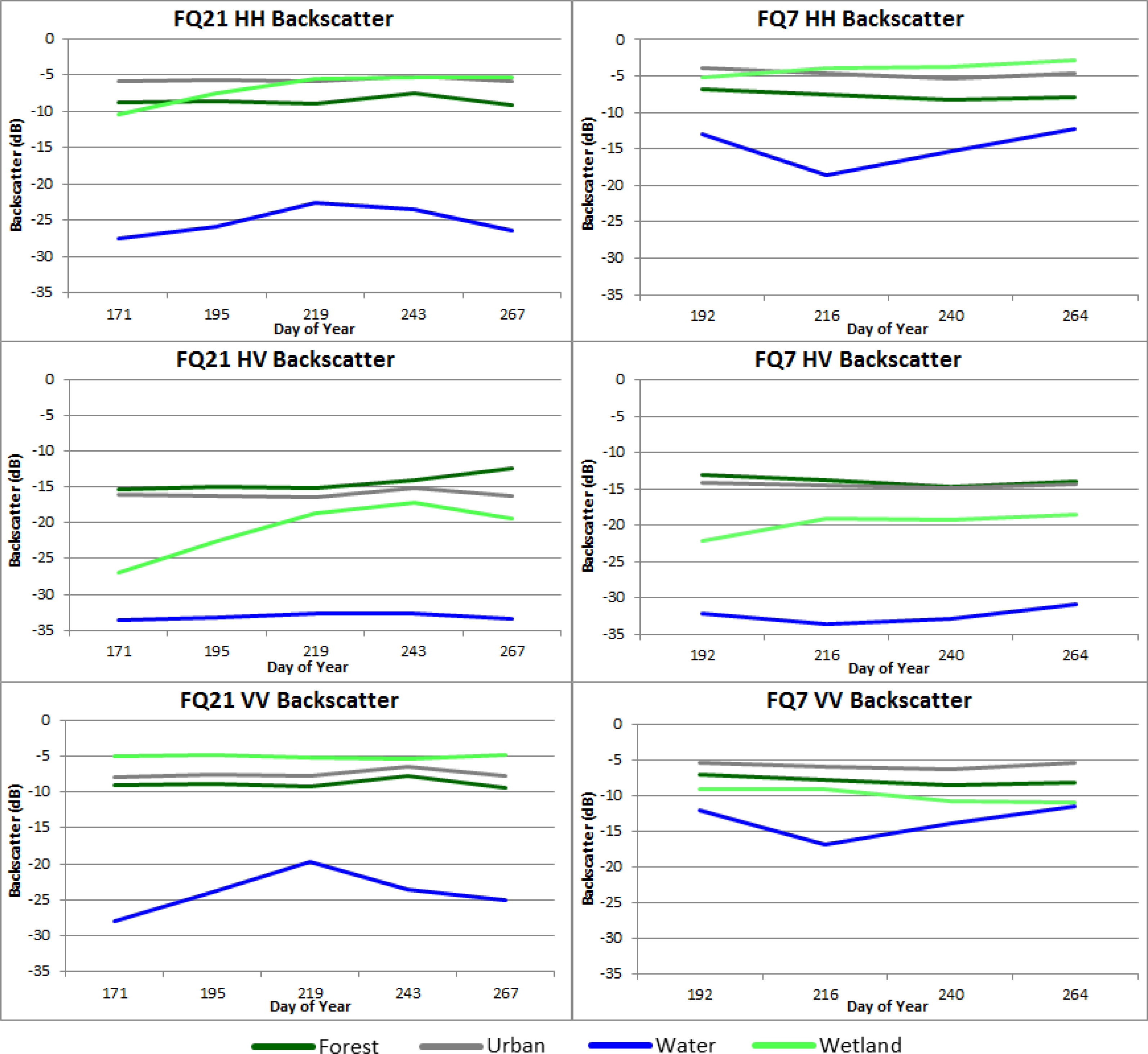
5.1. Backscatter Intensity
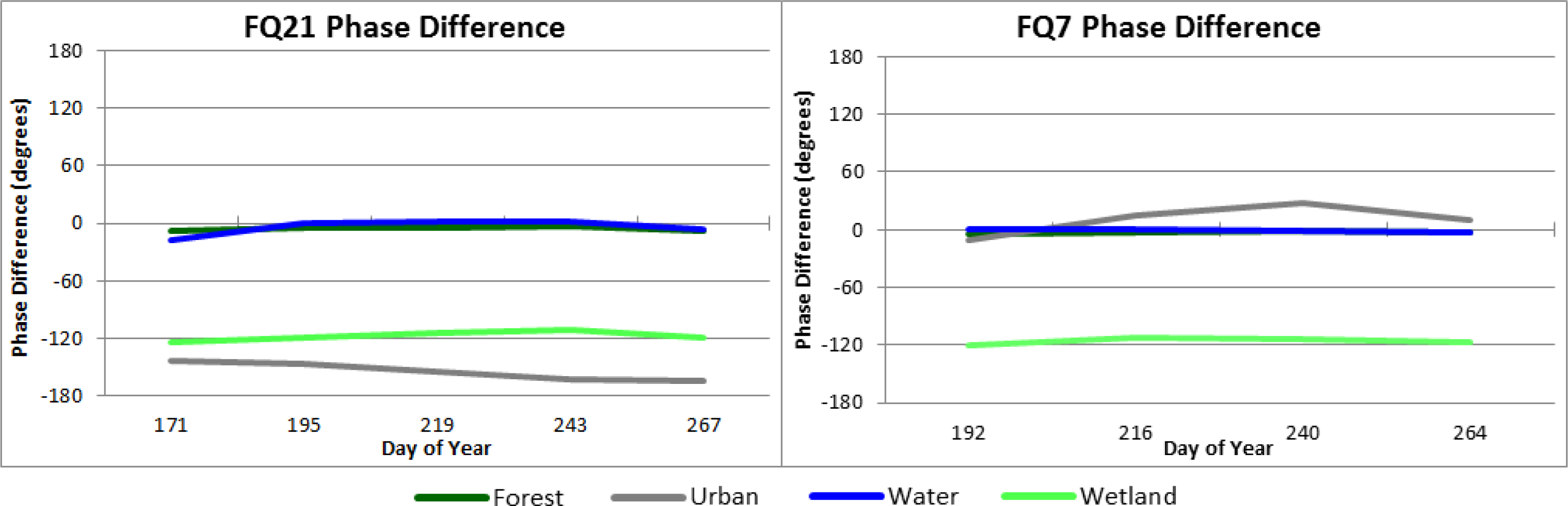
5.2. Co-Polarized Phase Difference
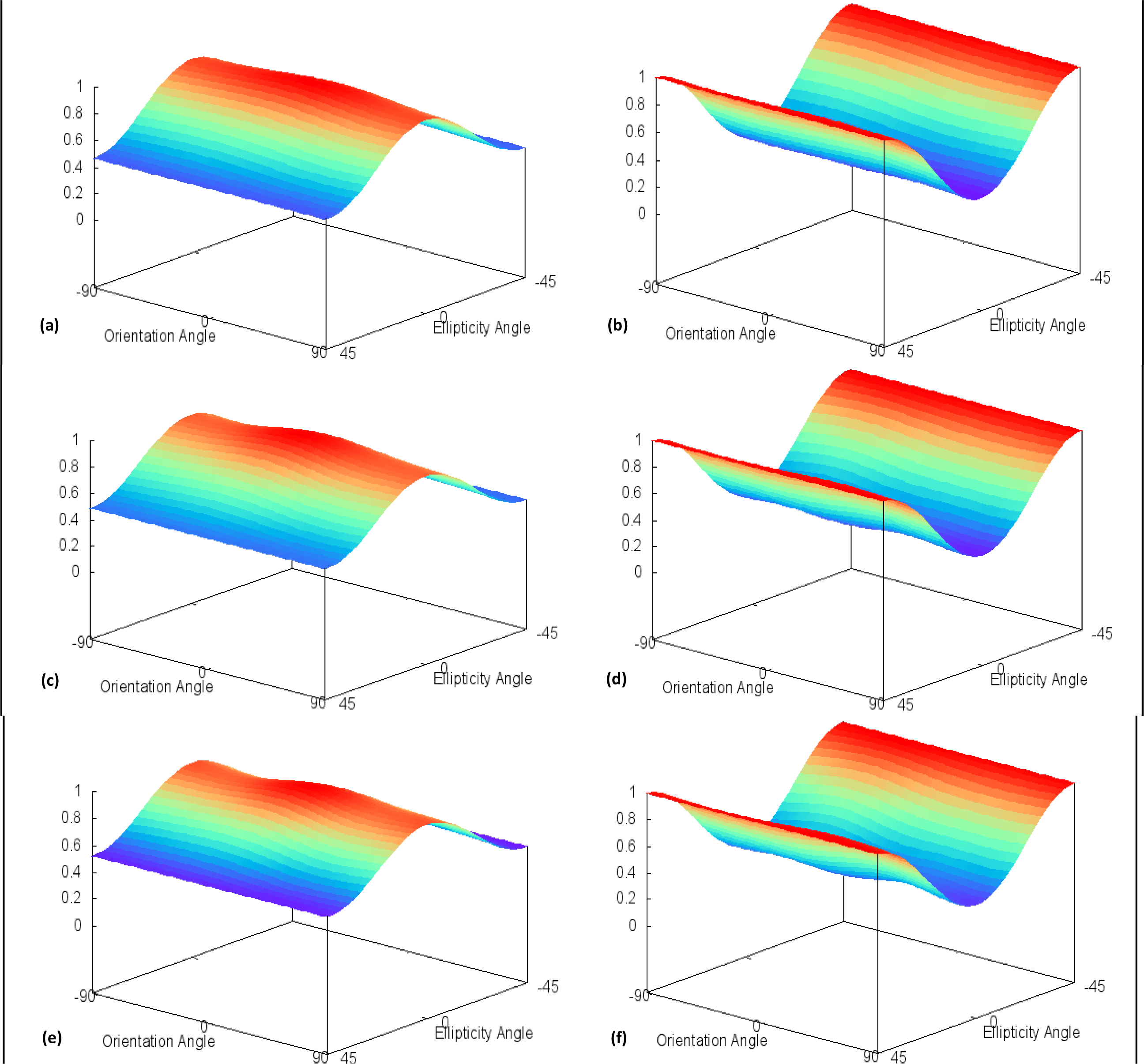
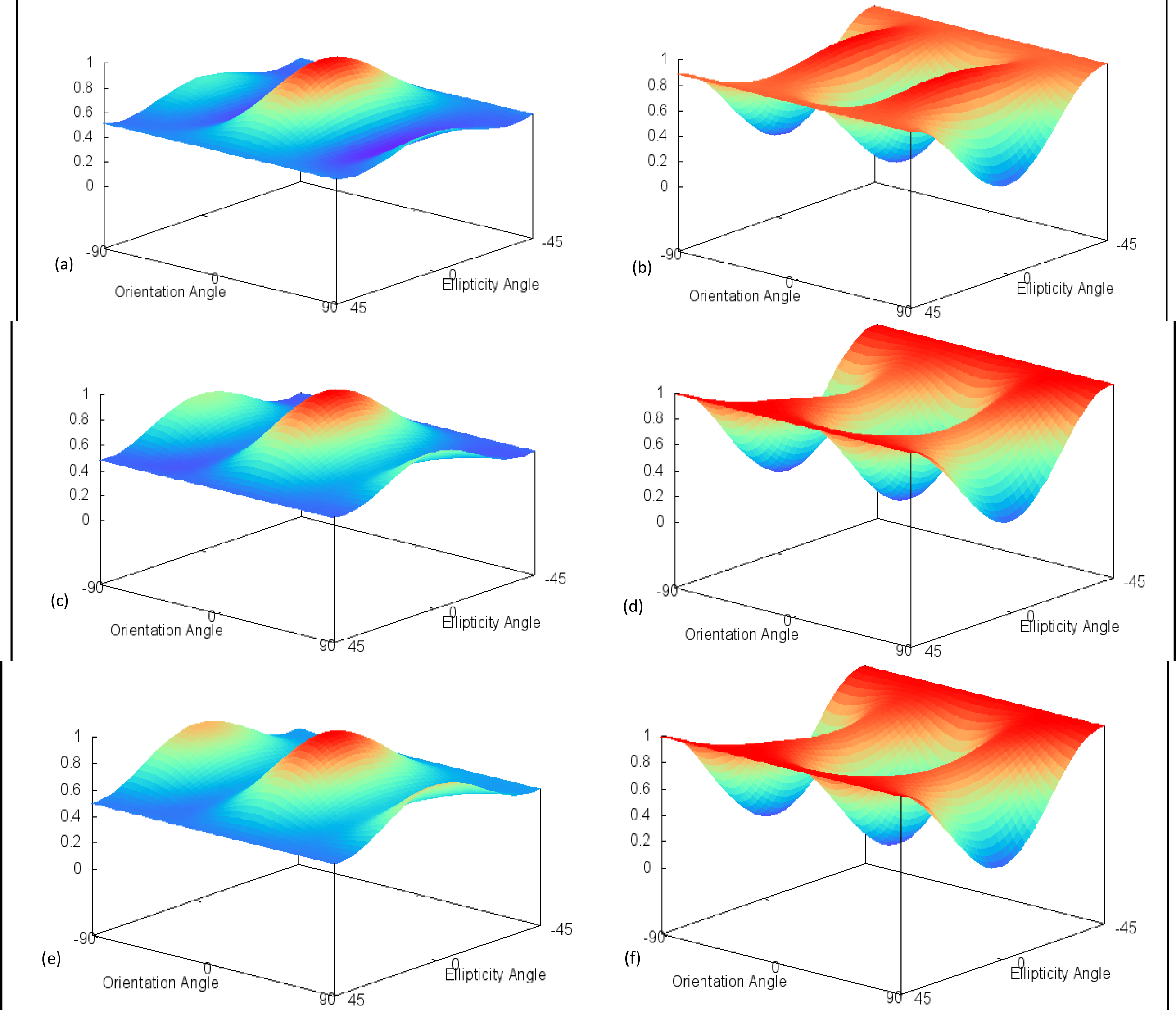
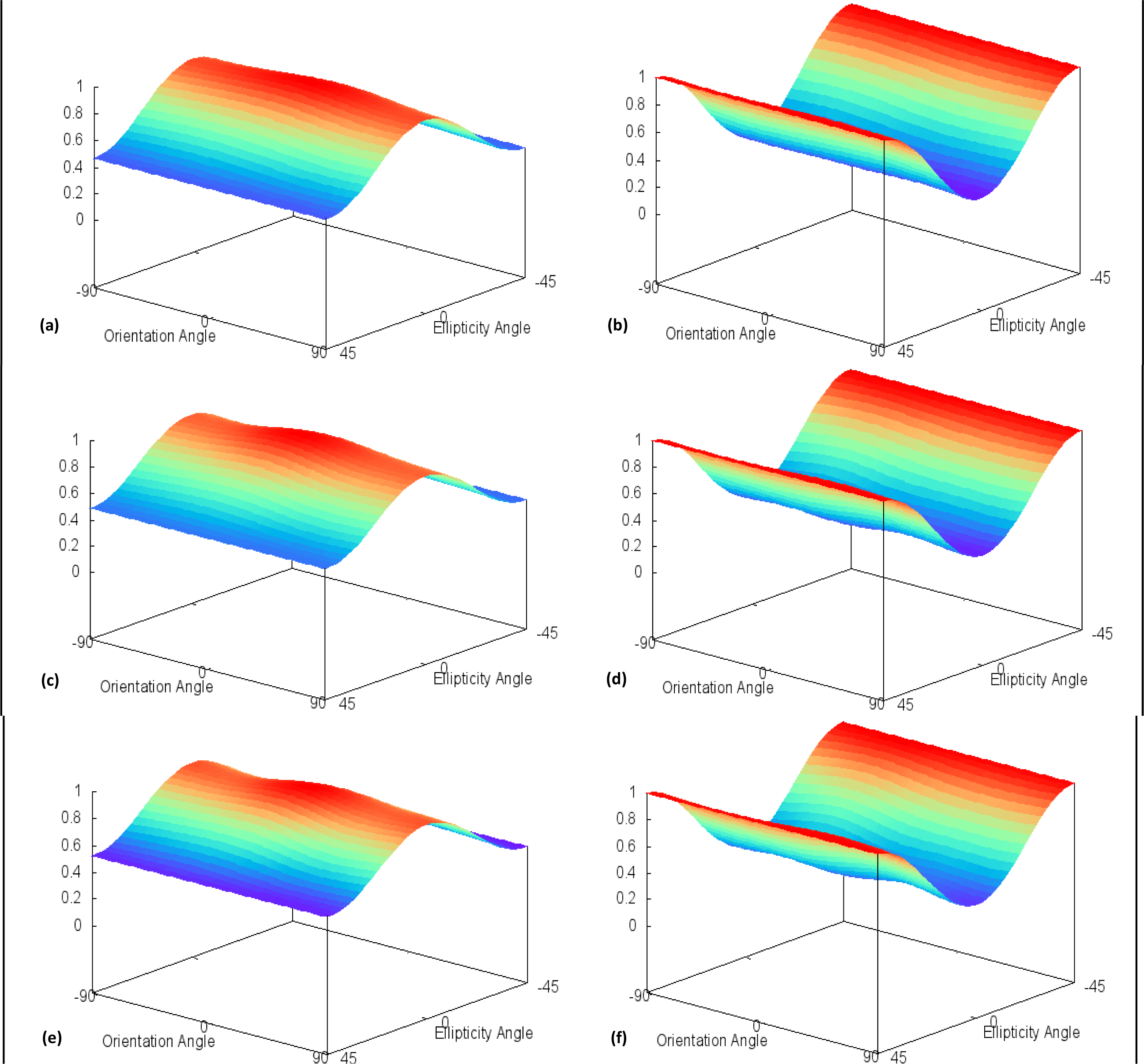
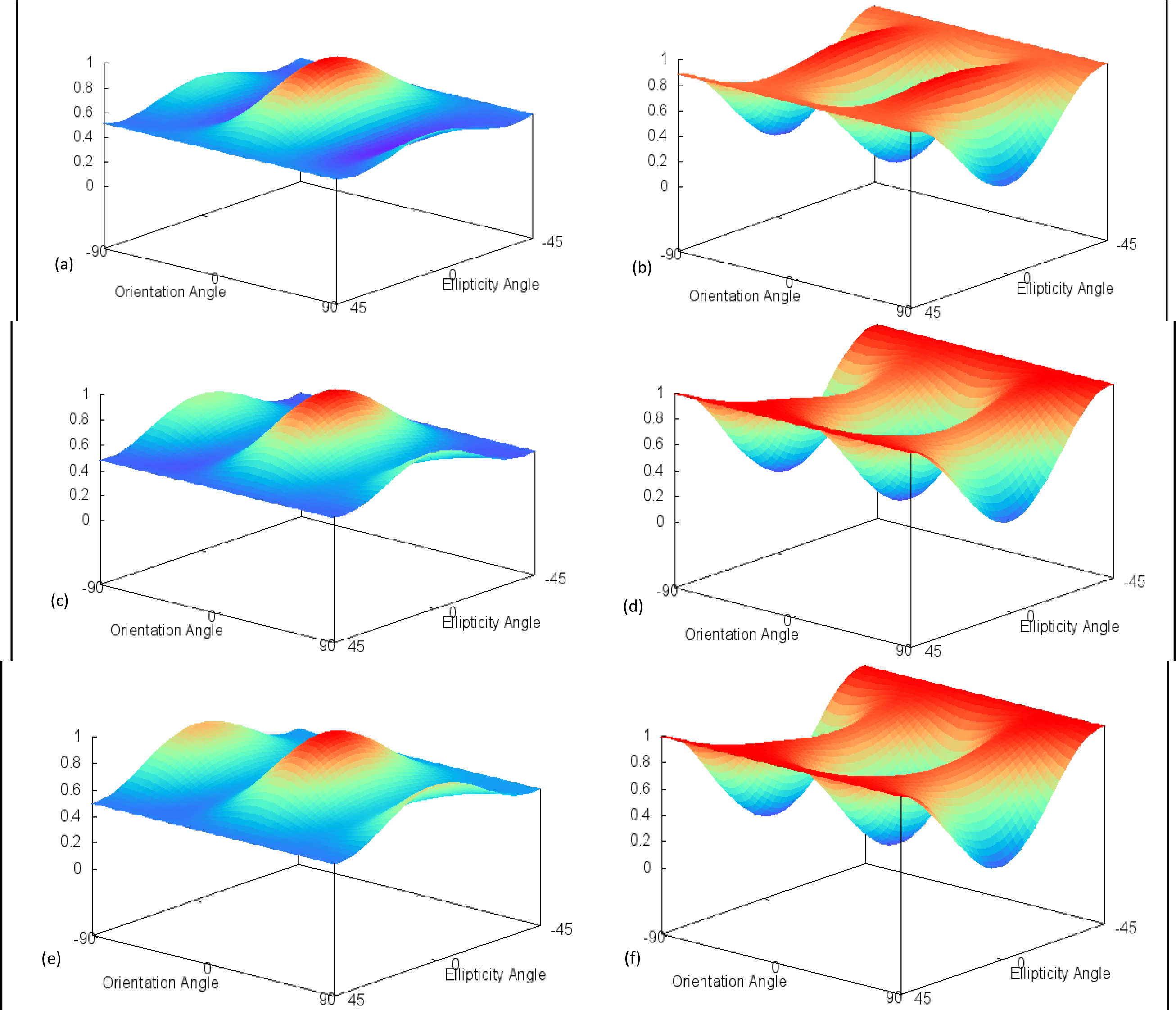
5.3. Polarimetric Response Plots and Decompositions
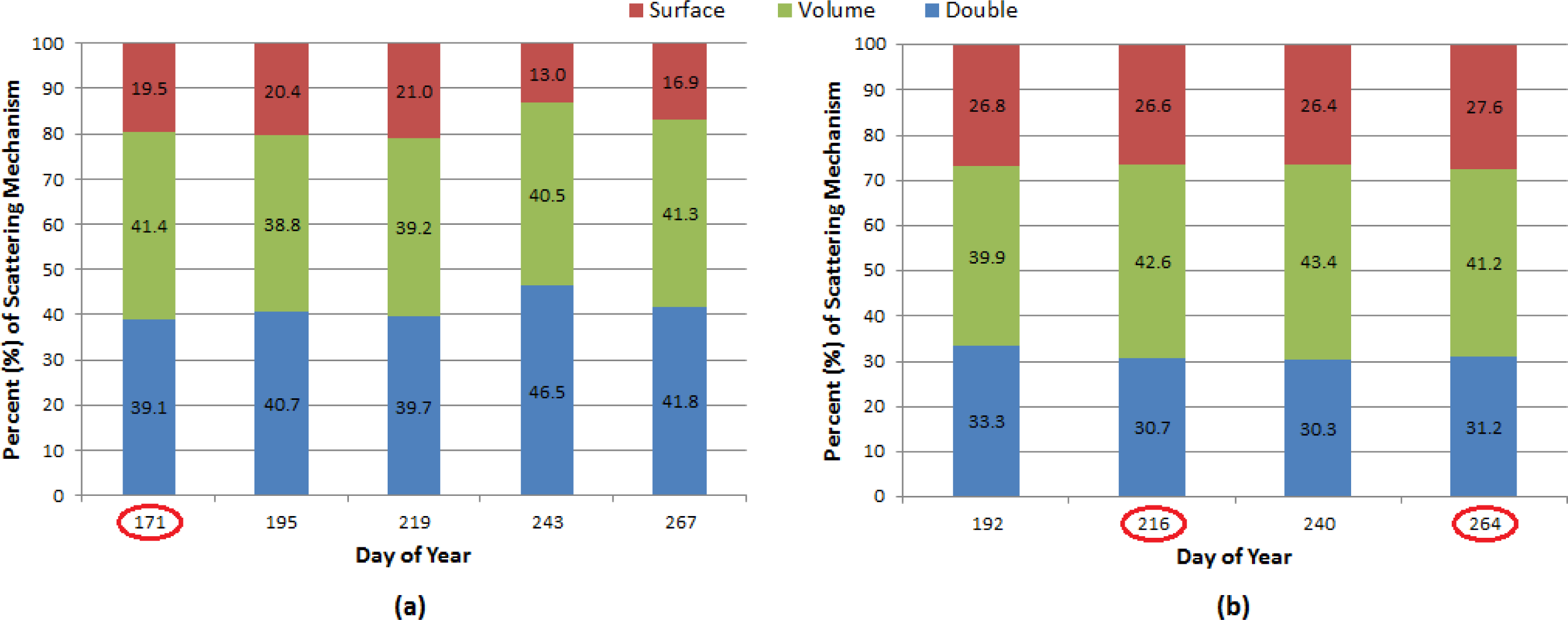
5.3.1. Forest
5.3.2. Urban
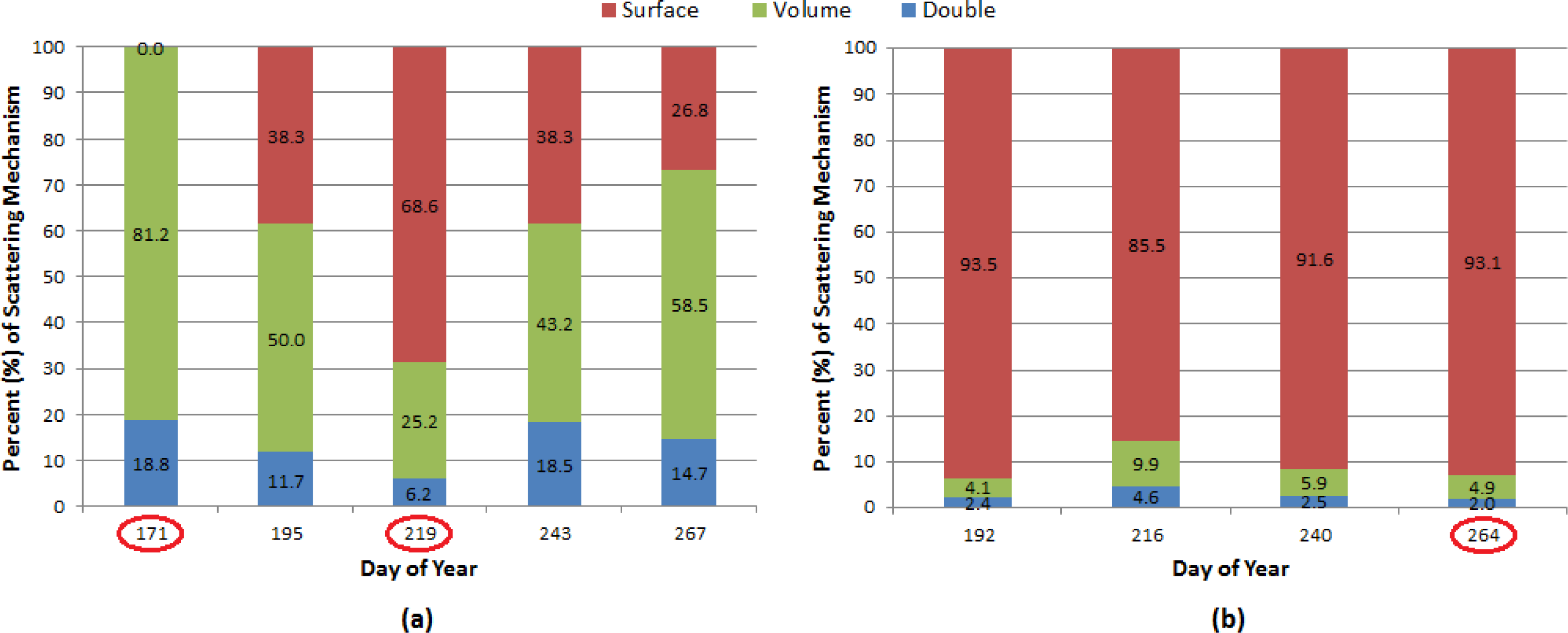
5.3.3. Surface Water
5.3.4. Marsh Wetlands
6. Conclusion
remotesensing-06-02372-s001.pdf
Acknowledgments
Authors Contributions
Conflicts of Interest
References
- Touzi, R.; Deschamps, A.; Rother, G. Wetland characterization using polarimetric RADARSAT-2 capability. Can. J. Remote Sens 2007, 33, S56–S67. [Google Scholar]
- Koch, M.; Schmid, T.; Reyes, M.; Gumuzzio, J. Evaluating full polarimetric C-and L-band data for mapping wetland conditions in a semi-arid environment in Central Spain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2012, 5, 1033–1044. [Google Scholar]
- McNairn, H.; Shang, J.; Champagne, C.; Jiao, X. TERRASAR-X and RADARSAT-2 for Crop Classification and Acreage Estimation. Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009.
- Qi, Z.; Yeh, A.G.; Li, X.; Lin, Z. A novel algorithm for land use and land cover using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ 2012, 118, 21–39. [Google Scholar]
- Skriver, H.; Svendsen, M.T.; Thomsen, A.G. Multitemporal C- and L-band polarimetric signatures of crops. IEEE Trans. Geosci. Remote Sens 1999, 37, 2413–2429. [Google Scholar]
- Canada Centre for Remote Sensing. Advanced Radar Polarimetry Tutorial. 2013. Available online: http://www.nrcan.gc.ca/earth-sciences/geography-boundary/remote-sensing/radar/1893 (accessed on 25 August 2011).
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens 1998, 36, 963–973. [Google Scholar]
- McNairn, H.; Shang, J.; Jiao, X.; Champagne, C. The contribution of ALOS PALSAR multipolarization and polarimetric data to crop classification. IEEE Trans. Geosci. Remote Sens 2009, 47, 3981–3992. [Google Scholar]
- Cloude, S.R.; Pottier, E. An entropy classification scheme for land applications of polarimetric SAR data. IEEE Trans. Geosci. Remote Sens 1997, 35, 68–78. [Google Scholar]
- Pottier, E.; Lee, J.S. Application of the H/A/α Polarimetric Decomposition Theorem for Unsupervised Classification of Fully Polarimetric SAR Data Based on the Wishart Distribution. Proceedings of the SAR Workshop—CEOS Working Group on Calibration and Validation, Toulouse, France, 26–29 October 1999; pp. 335–340.
- Pellizzeri, T.M. Classification of polarimetric SAR images of suburban areas using joint annealed segmentation and H/A/α polarimetric decomposition. ISPRS J. Photogramm. Remote Sens 2007, 58, 55–70. [Google Scholar]
- Bugden, J.L.; Pattey, E.; McNairn, H. Classification of crop and soil homogenous zones using multipolarization C-band SAR. Can. J. Remote Sens 2009, 35, 130–140. [Google Scholar]
- Li, K.; Brisco, B.; Yun, S. Polarimetric decomposition with RADARSAT-2 for rice mapping and monitoring. Can. J. Remote Sens 2012, 38, 169–179. [Google Scholar]
- Van Zyl, J.J.; Zebker, H.A.; Elachi, C. Imaging radar polarization signatures: Theory and observations. Radio Sci 1987, 22, 529–543. [Google Scholar]
- Webber, L.R.; Hoffman, D.W. Origin, Classification and Use of Ontario Soils; Ontario Department of Agriculture and Food: Toronto, ON, Canada, 1970; p. 58. [Google Scholar]
- The Corporation of the Municipality of West Nipissing. Agriculture in West Nipissing. Available online: http://www.westnipissingouest.ca/agriculture.html (accessed on 26 April 2012).
- Kershaw, L. Trees of Ontario; Lone Pine Publishing: Edmonton, AB, Canada, 2001. [Google Scholar]
- Pinto, F.; Rouillard, D.; Sobze, J.M.; Ter-Mikaelian, M. Validating tree species composition in forest resource inventory for Nipissing forest, ON, Canada. For. Chron 2007, 83, 247–251. [Google Scholar]
- Statistics Canada. Available online: http://www12.statcan.gc.ca/census-recensement/2011/dp-pd/prof/index.cfm (accessed on 13 May 2013).
- Legasy, K.; LaBelle-Beadman, S.; Chambers, B. Forest Plants of Northeastern Ontario; Lone Pine Publishing: Edmonton, AB, Canada, 1995. [Google Scholar]
- Ontario Ministry of Natural Resources. Cache Bay Wetland Conservation Reserve (C171); Ontario Ministry of Natural Resources: North Bay, ON, Canada, 2003. [Google Scholar]
- Jiao, X.; McNairn, H.; Shang, J.; Pattey, E.; Liu, J.; Champagne, C. The sensitivity of RADARSAT-2 polarimetric SAR data to corn and soybean leaf area index (LAI). Can. J. Remote Sens 2011, 37, 69–81. [Google Scholar]
- Boerner, W.M.; Mott, H.; Luneburg, E.; Livingstone, C.; Brisco, B.; Brown, R.J.; Patterson, J.S. Polarimetry in Radar Remote Sensing: Basic and Applied Concepts. In Manual of Remote Sensing: Principles and Applications of Imaging Radar, 3rd ed; Henderson, F.M., Lewis, A.J., Eds.; John Wiley and Sons: Toronto, ON, Canada, 1998; Volume 2, pp. 271–356. [Google Scholar]
- Van Zyl, J.J.; Zebker, H.A. Imaging Radar Polarimetry. In Progress in Electromagnetics Research 3: Polarimetric Remote Sensing; Kong, J.A., Ed.; Elsevier: New York, NY, USA, 1990; pp. 277–326. [Google Scholar]
- Staples, G. Understanding SAR Polarimetry; MDA Geospatial Services: Richmond, BC, Canada, 2007. [Google Scholar]
- Ulaby, F.T.; Held, D.; Dobson, M.C.; McDonald, K.C. Relating polarization phase difference of SAR signals to scene properties. IEEE Trans. Geosci. Remote Sens 1987, 25, 83–92. [Google Scholar]
- Henderson, F.M.; Xia, Z. Radar Applications in Urban Analysis, Settlement Detection and Population Estimation. In Manual of Remote Sensing: Principles and Applications of Imaging Radar, 3rd ed; Henderson, F.M., Lewis, A.J., Eds.; John Wiley and Sons: Toronto, ON, Canada, 1998; Volume 2, pp. 733–768. [Google Scholar]
- Leckie, D.G. Forestry Applications Using Imaging Radar. In Manual of Remote Sensing: Principles and Applications of Imaging Radar, 3rd ed; Henderson, F.M., Lewis, A.J., Eds.; John Wiley and Sons: Toronto, ON, Canada, 1998; Volume 2, pp. 435–510. [Google Scholar]
- Raney, R.K. Radar Fundamentals: Technical Perspective. In Manual of Remote Sensing: Principles and Applications of Imaging Radar, 3rd ed; Henderson, F.M., Lewis, A.J., Eds.; John Wiley and Sons: Toronto, ON, Canada, 1998; Volume 2, pp. 9–130. [Google Scholar]
- McNairn, H.; Duguay, C.; Brisco, B.; Pultz, T.J. The effect of soil and crop residue characteristics on polarimetric radar response. Remote Sens. Environ 2002, 80, 308–320. [Google Scholar]
- Nunziata, F.; Migliaccio, M.; Gambardella, A. Pedestal height for sea oil slick observation. IET Radar Sonar Naviga 2011, 5, 103–110. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition (mm-dd-yyyy) | Day of Year | Polarization (Beam Mode) | Resolution (m) | Incidence Angle (°) | Orbit (Look Direction) | Wind Speed (km/h) |
|---|---|---|---|---|---|---|
| 06-20-2011 | 171 | Polarimetric (FQ21) | 10 | 41 | Ascending (Right) | 0 |
| 07-11-2011 | 192 | Polarimetric (FQ7) | 10 | 26 | Ascending (Right) | 6 |
| 07-14-2011 | 195 | Polarimetric (FQ21) | 10 | 41 | Ascending (Right) | 6.8 |
| 08-04-2011 | 216 | Polarimetric (FQ7) | 10 | 26 | Ascending (Right) | 4 |
| 08-07-2011 | 219 | Polarimetric (FQ21) | 10 | 41 | Ascending (Right) | 9.7 |
| 08-28-2011 | 240 | Polarimetric (FQ7) | 10 | 26 | Ascending (Right) | 5.4 |
| 08-31-2011 | 243 | Polarimetric (FQ21) | 10 | 41 | Ascending (Right) | 6.8 |
| 09-21-2011 | 264 | Polarimetric (FQ7) | 10 | 26 | Ascending (Right) | 10.8 |
| 09-24-2011 | 267 | Polarimetric (FQ21) | 10 | 41 | Ascending (Right) | 0 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Cable, J.W.; Kovacs, J.M.; Shang, J.; Jiao, X. Multi-Temporal Polarimetric RADARSAT-2 for Land Cover Monitoring in Northeastern Ontario, Canada. Remote Sens. 2014, 6, 2372-2392. https://doi.org/10.3390/rs6032372
Cable JW, Kovacs JM, Shang J, Jiao X. Multi-Temporal Polarimetric RADARSAT-2 for Land Cover Monitoring in Northeastern Ontario, Canada. Remote Sensing. 2014; 6(3):2372-2392. https://doi.org/10.3390/rs6032372
Chicago/Turabian StyleCable, Jeffrey W., John M. Kovacs, Jiali Shang, and Xianfeng Jiao. 2014. "Multi-Temporal Polarimetric RADARSAT-2 for Land Cover Monitoring in Northeastern Ontario, Canada" Remote Sensing 6, no. 3: 2372-2392. https://doi.org/10.3390/rs6032372
APA StyleCable, J. W., Kovacs, J. M., Shang, J., & Jiao, X. (2014). Multi-Temporal Polarimetric RADARSAT-2 for Land Cover Monitoring in Northeastern Ontario, Canada. Remote Sensing, 6(3), 2372-2392. https://doi.org/10.3390/rs6032372