1. Introduction
Research on biogeochemical cycling, the global carbon cycle and climate change have shown that the spatial distribution of C3 and C4 vegetation is relevant to atmospheric CO
2 and temperature changes [
1,
2,
3,
4]. C4 plants tend to favor warmer environments (warm season plants), and C3 plants thrive in areas with lower temperatures (cool season plants) in the mid-latitudes [
3,
5]. The balance between C3 and C4 plants changes with the atmospheric CO
2 content variation [
6,
7]. Therefore, mapping of C3 and C4 plants is important for the study of regional climate change and carbon cycle.
Previous studies have attempted to map C3 and C4 plants using remote sensing data. Hyperspectral data have proven to be effective in mapping C3 and C4 plants. Irisarri claimed that the hyperspectral data could discriminate C3 and C4 plants inside a laboratory [
8]. Hyperspectral remote sensing data with bands centered at 470 nm, 530 nm, 600 nm, 660 nm, 700 nm, 720 nm, 820 nm, 1540 nm, 2060 nm, 2280 nm, 2300 nm, 2450 nm and 2470 nm showed potential for classifying C3 and C4 plants, and features selected from these bands were used to classify C3 and C4 plants [
9]. The chlorophyll fluorescence derived from hyperspectral remote sensing data was used for discriminating C3 and C4 plants [
10,
11,
12]. A later study showed that chlorophyll fluorescence could be detected from space [
13], which indicated that it is possible to classify C3 and C4 vegetation using space borne remote sensing data. However, satellite borne sensors, such as the Thermal And Near-infrared Sensor for carbon Observation-Fourier Transform Spectrometer (TANSO-FTS) on the Japanese Greenhouse gases Observing SATellite (GOSAT), the MEdium Resolution Imaging Spectrometer (MERIS) aboard the European Space Agency’s (ESA’s) ENVIronmental SATellite (ENVISAT), and the TOMS (Total Ozone Mapping Spectrometer) aboard the Orbiting Carbon Observatory-2 (OCO-2) launched by NASA have coarse spatial resolutions (300 m for ENVISAT, 10.5 km for GOSAT and 1.29 × 2.25 km for OCO-2). The coarse spatial resolution of satellite data leads to a large number of mixed pixels, especially for fragmented landscapes. This implies that the chlorophyll fluorescence derived from satellite remote sensing data is not yet suitable for high spatial resolution C3 and C4 plant classification over the regional scale.
Physiologically, C3 and C4 lifeforms are distinguished by their different photosynthetic pathways through which carbon is fixed into carbohydrates. Vegetation utilizing C3 and C4 photosynthetic pathways exhibit physiological and morphological differences that result in dissimilar responses to environmental conditions, such as light saturation, maximum rate of net photosynthesis, optimum temperature for net photosynthesis, transpiration rate and growth rate [
14,
15]. Although, with their sensitivity to varying environmental disturbances, C3 and C4 species exhibit markedly different seasonal activity cycles [
16]. Compared to C4 species, C3 species green up earlier and are more active under the cooler temperature conditions of spring and early fall. In contrast, C4 species green up later in the growing season and are more active under the warmer, drier conditions of mid to late summer [
17]. These contrasts in phenological characteristics make the C3 and C4 vegetation types exhibiting asynchronous seasonality in their pattern of greenness.
Because of the seasonal differences between C3 and C4 plants, measurement of vegetation greenness (e.g., NDVI) derived from time series of remote sensing data have the potential to discriminate C3 and C4 plants. Studies have been conducted to determine the temporal offsets of photosynthetic activity for these two types of vegetation [
5,
17,
18,
19]. Foody
et al. proved the possibility of mapping C3 and C4 vegetation composition in South Dakota, US by capturing the asynchronous seasonal profile from time series of MTCI (MERIS terrestrial chlorophyll index) data product [
19]. Wang
et al. classified C3 and C4 type of grasses using time-series MODIS derived phenology metrics in the U.S. Great Plains [
5]. Compared to the satellite remote sensing data with many mixed pixels and the airborne data that are economically-costly for the regional scale C3 and C4 distribution mapping, the high temporal resolution data products that can be used as time-series data are more suitable. The high temporal resolution data products, including AVHRR, MODIS and MTCI MERIS,
etc. are usually used to capture the phenological asynchronicity of C3 and C4 vegetation. However, the existing high temporal resolution data, such as MODIS and AVHRR data, are not suitable to be used for mapping C3 and C4 plants in regions with fragmented landscapes due to their coarse spatial resolutions. Remote sensing data with finer spatial resolutions, such as Landsat TM/ETM+, however, could not capture the fine dynamics of the vegetation due to their long revisiting cycles.
Data with both high spatial and temporal resolutions are still not available to extract the time-series features for C3 and C4 classification at a regional scale. To generate time-series satellite data with high spatial and temporal resolutions, several data fusion models have been proposed and have been proven to be practicable. Gao
et al. developed a Spatial and Temporal Adaptive Reflectance Fusion Model (STARFM) for blending the Landsat and MODIS data to generate daily surface reflectance data at a 30 m spatial resolution [
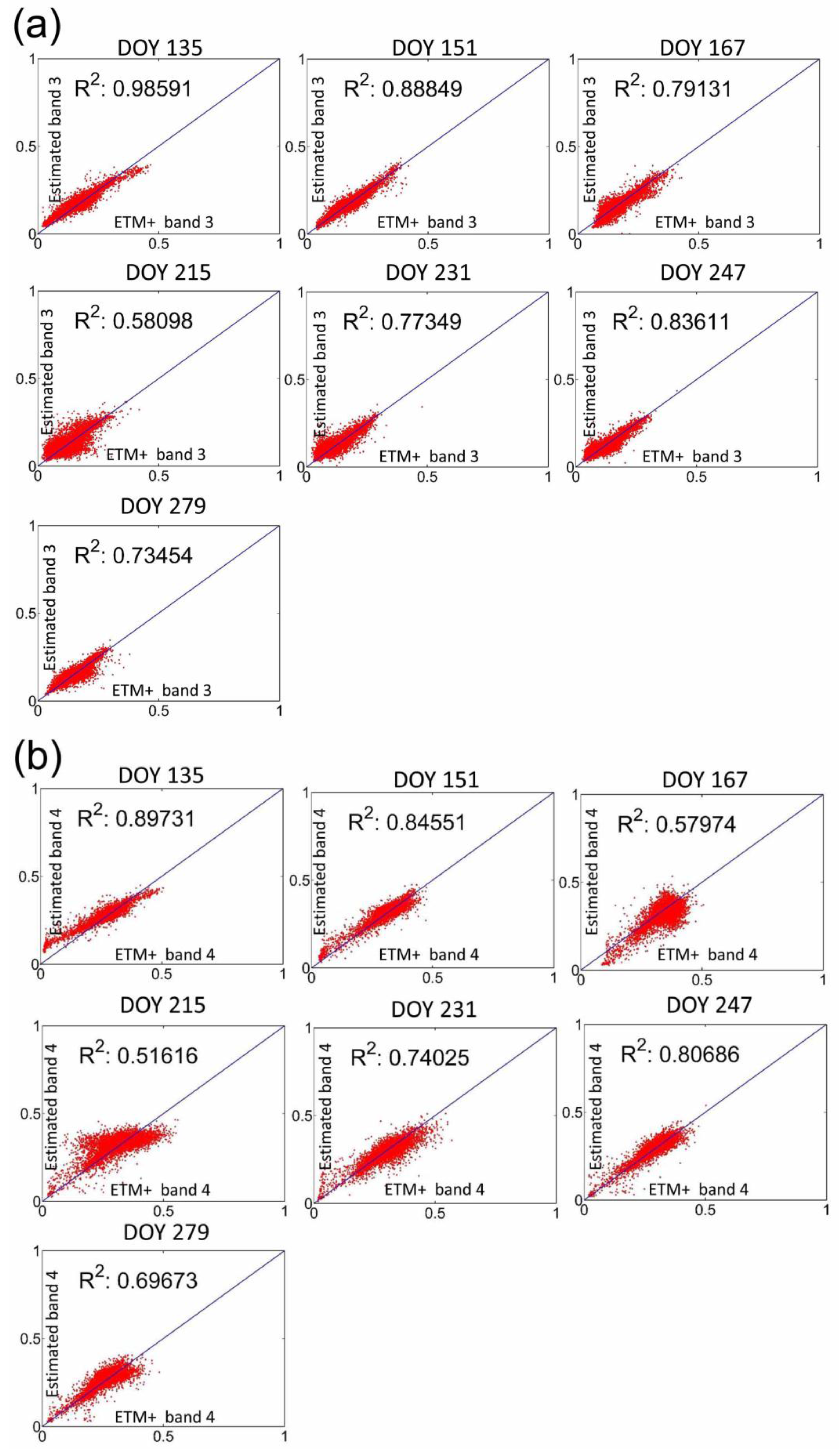
20]. To overcome the shortcoming of STARFM in inaccurate prediction of the surface reflectance over heterogeneous landscapes, an Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model (ESTARFM) has been proposed to generate more accurate land surface reflectance in heterogeneous regions [
21].
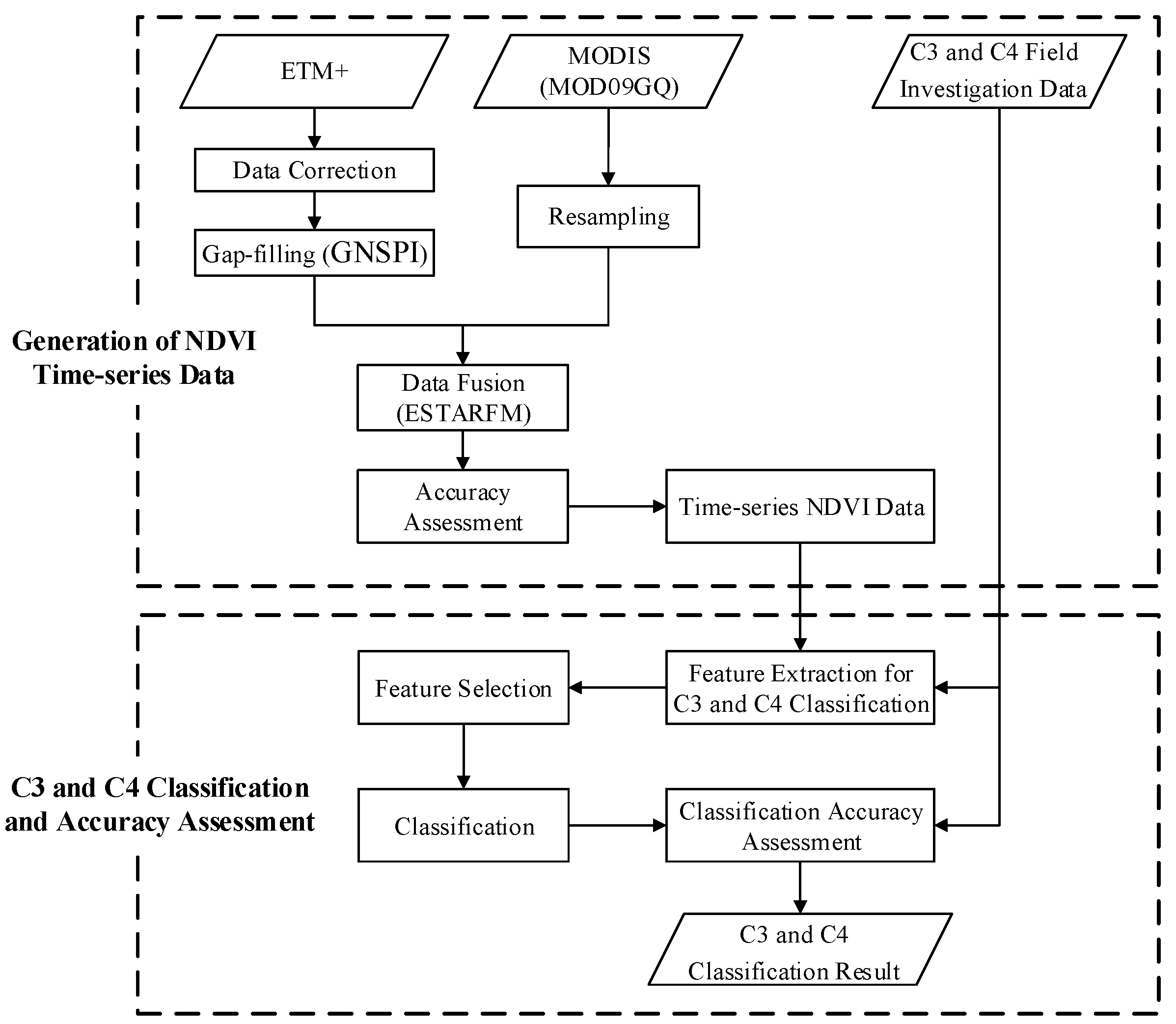
The aim of this study is to propose a framework for mapping C3 and C4 vegetation types in spatially heterogeneous landscapes using high spatio-temporal resolution remote sensing data. The high spatial resolution time-series data was derived from fusing daily MODIS land surface reflectance data and Landsat ETM+ data. The study area is the middle reaches of the Heihe River Basin, Gansu Province, China, where the landscape is fragmented and the vegetation distribution is complicated. The proposed framework includes: (1) to generate daily 30m resolution land surface reflectance data by fusing MODIS and Landsat ETM+ data using the ESFARFM and to evaluate the accuracy of the fused data; (2) to generate the NDVI time-series data using the fused land surface reflectance data, and to extract classification features from the NDVI time-series data for C3 and C4 plant classification; and (3) to classify the C3 and C4 plants in the middle reaches of Heihe Watershed, China, using the SVM (Support Vector Machine) classifier with selected classification features.
This paper is organized as follows. In
Section 2, we describe the study area and the dataset used in the analysis. In
Section 3, we present our methods for the data pre-processing, data fusion accuracy assessment, C3 and C4 vegetation seasonality feature extraction and the C3 and C4 vegetation classification. The results are presented and analyzed in
Section 4. A summary of the whole study and the conclusions are provided in
Section 5.
5. Conclusions
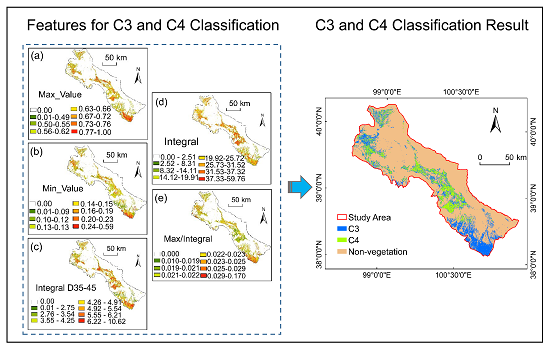
We presented a framework for high spatial resolution C3 and C4 vegetation classification in regions with fragmented landscapes. In this framework, daily land surface reflectance data at 30 m spatial resolution was generated by fusing MODIS and Landsat ETM+ data using the ESFARFM algorithm. Based on the time-series NDVI data generated from the fused land surface reflectance data, features for C3 and C4 vegetation classification were extracted and selected. C3 and C4 vegetation was classified using the selected features and the nonparametric machine learning classifier, SVM.
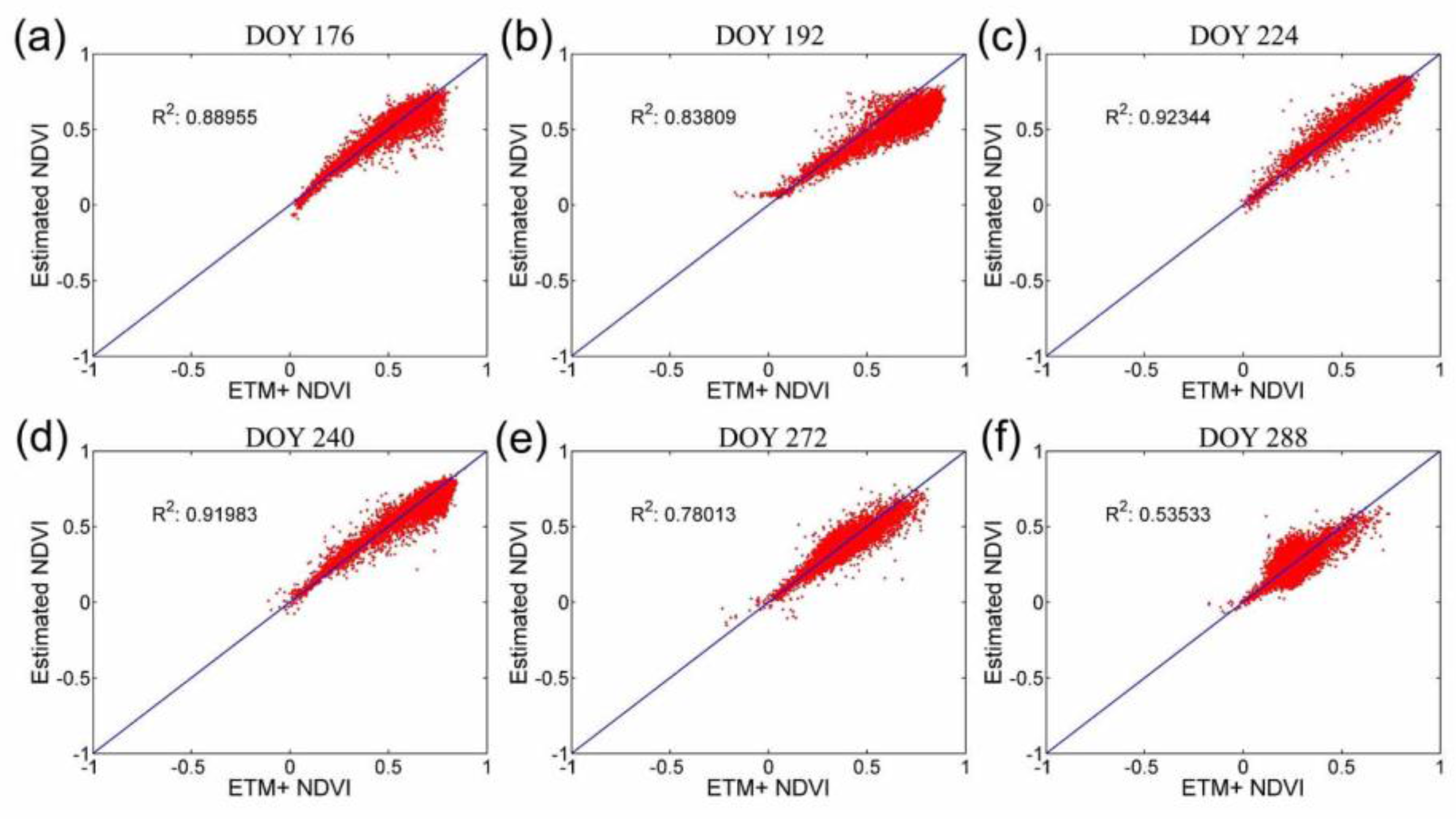
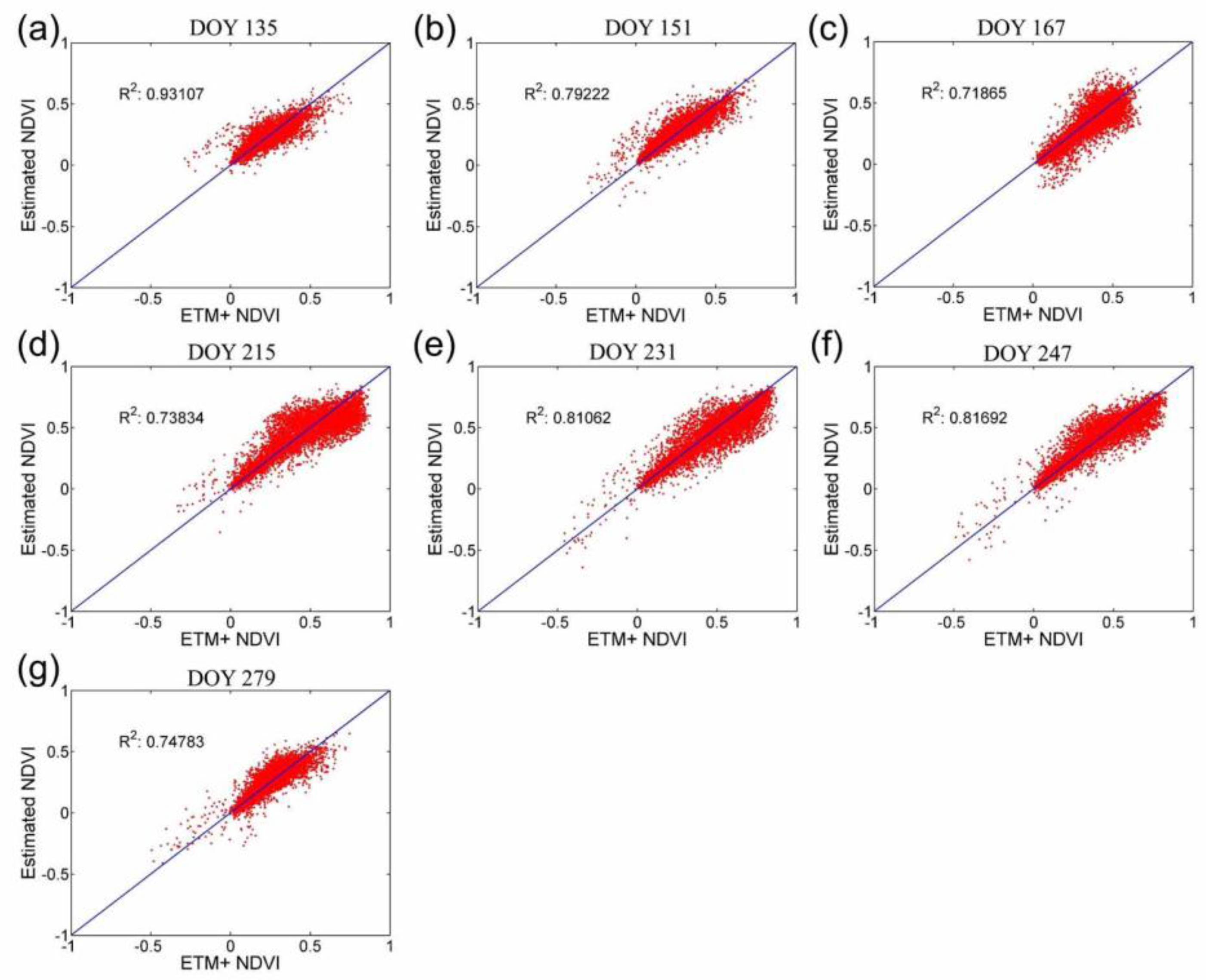
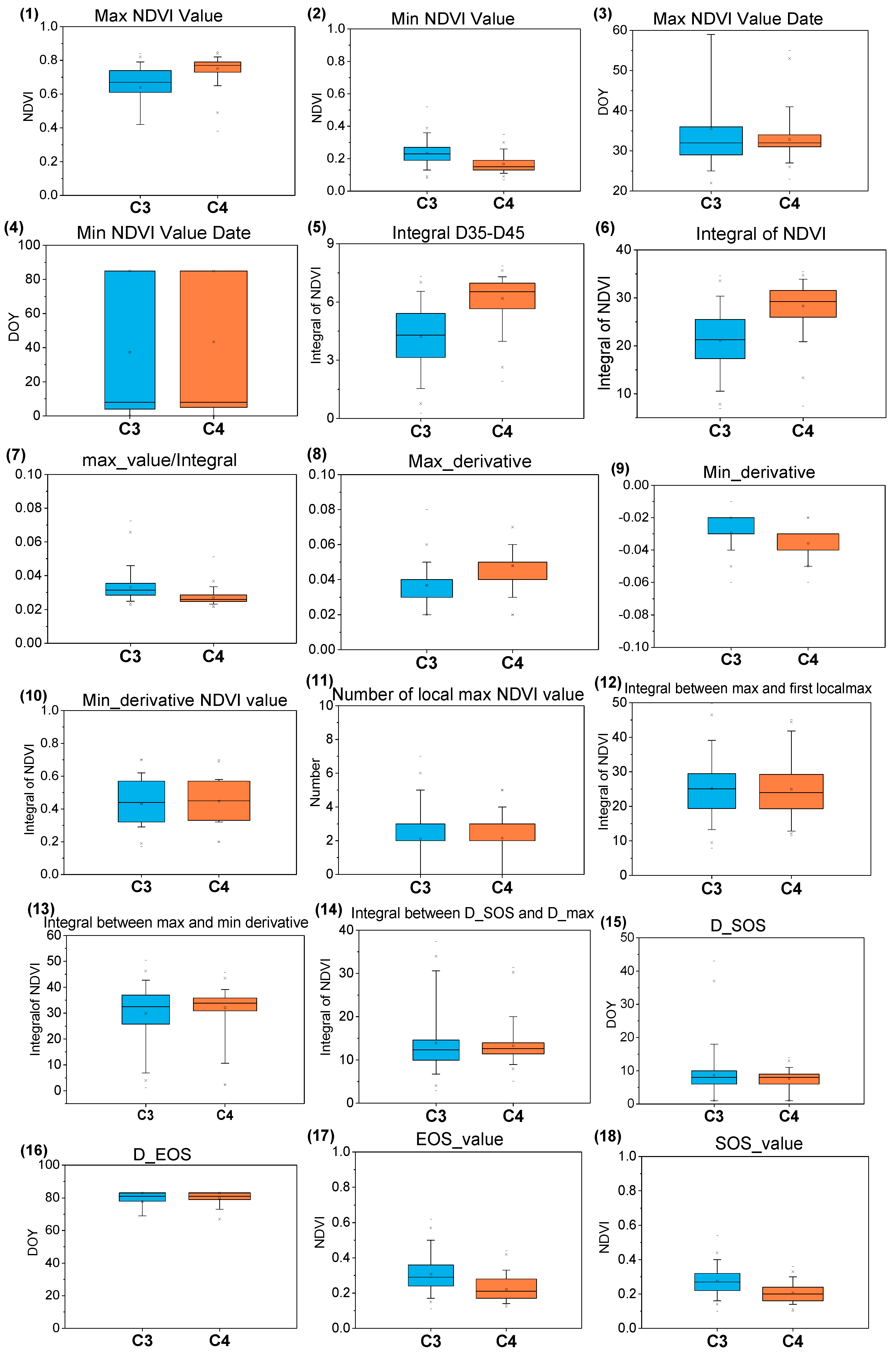
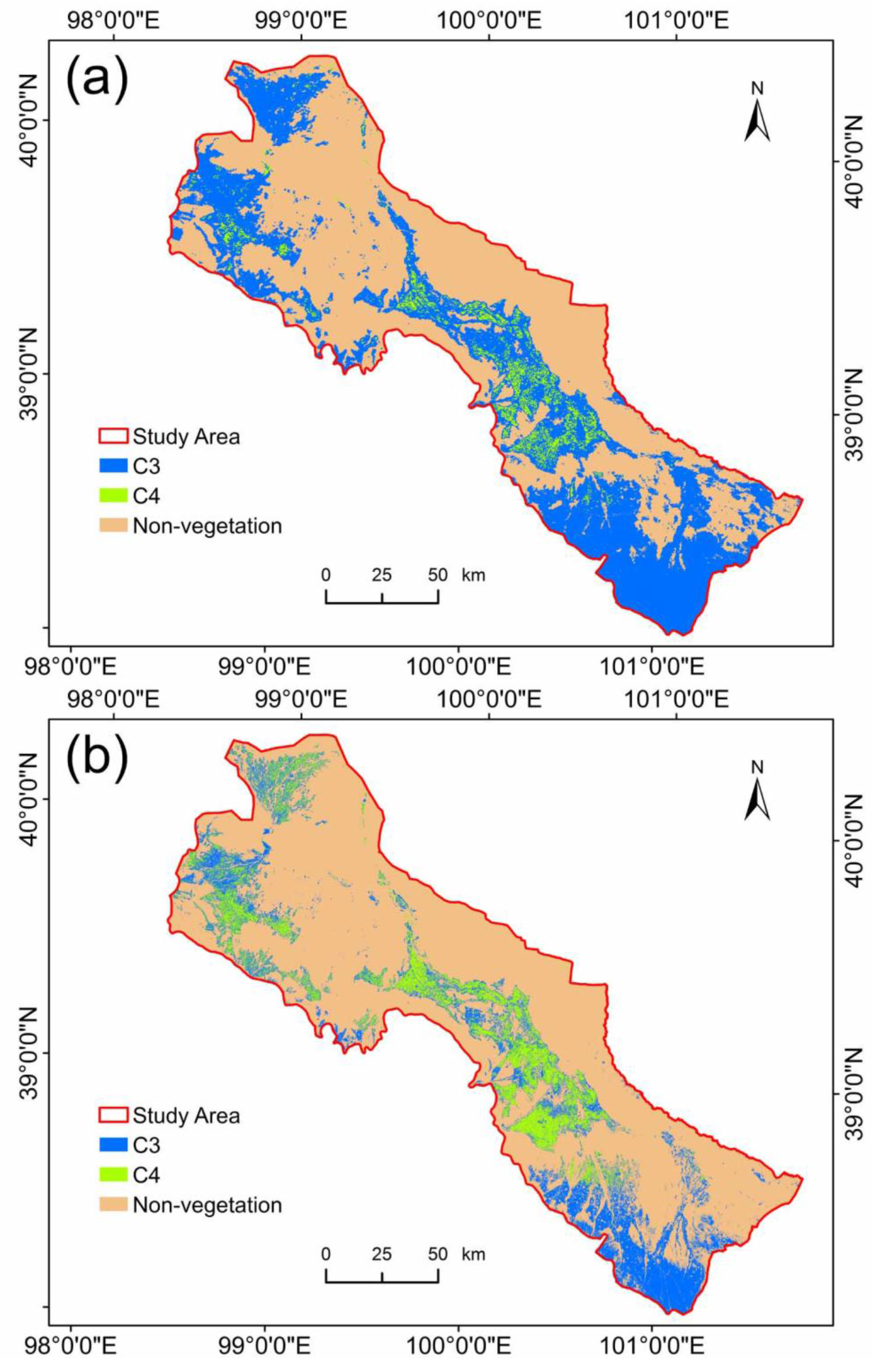
The C3 and C4 classification framework was tested in the middle reaches of Heihe Watershed that locates in Gausu Province, China. The result indicated that the average R2 between the predicted NDVI and the ETM+ derived NDVI was more than 0.88. The combination of 5 selected classification features (minimum/maximum NDVI value, integral of time-series NDVI, the ratio between maximum NDVI value, and the integral of time-series NDVI) could better capture the differences between C3 and C4 vegetation. Compared to the C3 and C4 vegetation classification using the time-series MODIS data with 250m spatial resolution, the fused time-series data with 30m spatial resolution achieved a higher C3 and C4 vegetation classification accuracy (16% higher than those of MODIS C3 and C4 classification accuracy). The fused time-series NDVI data could map C3 and C4 vegetation distribution better over regions with fragmented landscapes.
Compared to the previous study of C3 and C4 grasses classification in the U.S. Great Plains [
5,
19], the classification results in this study by using blended finer resolution time-series remote sensing data shows more spatial details of C3 and C4 vegetation distribution. This is a critical advantage for C3 and C4 vegetation mapping in regions with spatially heterogeneous landscape.
Long time interval between Landsat TM/ETM+ data may introduce large uncertainties in the blended data. To achieve accurate classification of C3 and C4 using the methodology presented in this paper, one should collect time series Landsat TM/ETM+ data with as short time interval as possible.
C3 and C4 vegetation within the same climate zone show markedly different seasonal activity cycles. Thus, we suggest our method to be used in the same climate zone. The methodology presented in this paper also has the potential to map land cover types with a high spatial resolution time-series remote sensing data.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












