2.2. Orthorectification and Radiometric Terrain Calibration
Orthorectification of the data consisted of resampling the geocoded slant range data into a well-known projection and file format. SAR image radiometry is impacted by topographic slope. This terrain-induced change in backscatter can mimic the signature of inundated wetlands in areas where there should be no inundated wetlands (
i.e., hilly terrain). It is well known how to correct the radiometry of the image for this effect, but it requires that the imagery be well registered to the topographic data (e.g., [
29]). In addition, the elevation of the ground impacts the geometric translation of the slant range imagery when projected onto the topographic model of the Earth.
The JAXA Earth Observation Research Centre (EORC) provided ScanSAR mode slant range image strips for use by the science team of the ALOS K&C Initiative. These ScanSAR image strips were typically thousands of kilometers in length, but have reduced resolution compared to that obtained during standard processing. JAXA refers to these image products as “path” image products [
30].
First, topographic data were constructed from the publicly available SRTM DEM. Since the image strips extend across continental-scale regions, we created SRTM—like “tiles” of topography information corresponding to Universal Transverse Mercator (UTM) zone definitions, each tile therefore being approximately 6° × 8° in size. The tiles are reconstructed from the SRTM data to be slightly larger than the strict UTM zone definition to accommodate edge effects. These tiles remained in the standard SRTM projection, a rectangular latitude/longitude grid with a pixel spacing of 3 arcseconds. Since the ScanSAR path image products have a spatial resolution of approximately 100 m, the resolutions of the DEM and ScanSAR imagery are roughly comparable.
For orthorectification and radiometric terrain correction, a software package from Gamma Remote Sensing [
31] was employed. Each processed path image was projected onto the DEM of each UTM zone that it passed through. To correct residual geolocation errors, the Gamma Remote Sensing package includes software for well-known techniques for estimating and correcting offsets between images [
32]. This software is designed to assist in co-registering pairs of SAR images prior to interfering them, but also can be used to correct the image geocoding parameters.
Wetland areas in our study regions are challenging, as they are highly dynamic. The rivers and wetland areas frequently change in appearance and sometimes slightly in location. However, we found that cross-correlating the imagery against a SAR image based on the SRTM DEM (
i.e., as described in [
33]) can be effectively used to determine geocoding errors.
The range and azimuth offsets sampled from 388 UTM grid-zone-projected images prior to correction were examined (see
Figure 1). The mean range offset was found to be −0.22 pixels in range, and −0.54 pixels in azimuth, with a standard deviation of over 4 pixels. If we exclude outliers from one particular orbit path in which the offsets were consistently greater than 10 pixels, we found that the mean range offset was 0.34 pixels and the mean azimuth offset was −0.22 pixels, with a standard deviation of about 2 pixels. The range spacing for the path images was 37.5 meters in range and 70 m in azimuth, which led to a mean range offset of 12.8 m ± 82.5 m, and a mean azimuth offset of −15.4 m ± 119 m (excluding RSP424). Although the mean offset was quite small, the offset for each image was not a simple overall range and azimuth shift, but a varying shift in both range and azimuth. To compensate for this variability, a standard 6th order polynomial was fit to the varying range and azimuth offsets and used to correct the varying shift for each UTM grid-zone-projected path image.
Figure 1.
Mean offsets of 388 UTM grid-zone-projected path images from SRTM DEM.
Figure 1.
Mean offsets of 388 UTM grid-zone-projected path images from SRTM DEM.
Once the data were accurately geocoded with respect to the UTM grid-zone tiles, the radiometric terrain correction could be applied. The objective of the radiometric terrain correction is to determine the normalized radar backscatter
γ° in the ground plane from the slant range
σ° imagery provided by JAXA. The following equation was implemented by a set of code from Gamma Remote Sensing:
where
γ°x,y is normalized, terrain-corrected radar backscatter for each pixel (
x,
y);
σ°x,y is the ground projected sigma-naught values from JAXA for each (
x,
y) ground pixel;
θmid is the mid-swath incidence angle used by JAXA when calculating the original sigma-naught image;
θx,y is the local incidence angle at each (
x,
y) ground pixel; and
Ax,y is the pixel size normalization factor for each (
x,
y) pixel calculated from the projection angle, which is the angle between the surface normal and the image plane normal. Note this correction is only effective if we have an accurate assessment of the slope of the imaged terrain. Radiometric errors due to sub-pixel topographic slope variability cannot be corrected.
2.3. Relative and Absolute Calibration
Although the data have been generally corrected for radiometric error due to measured slope, errors in relative and absolute calibration remain in the imagery. Relative calibration errors are generally visible as brightness trends in the along-track or cross-track directions. Absolute calibration errors are absolute offsets that are noticeable when examining a temporal sequence of images from the same orbit geometry and observation mode.
There were several empirical approaches taken to correct for these remaining radiometric errors. When we use an empirical approach during calibration refinement, we must make some assumptions that may on occasion be violated. Some environmental conditions will result in changes in radar-backscattered brightness, and these changes in brightness may be incorrectly interpreted as calibration errors. When these “calibration errors” are “corrected”, the resultant imagery will actually be obscuring a real physical change in radar brightness. However, we chose to enforce consistent radiometry across the multi-temporal sequence of SAR images to more robustly enable the detection of inundation. Fortunately, the signatures of inundation, open water and inundated vegetation, are generally quite distinct from second order radiometric changes caused by physical changes in the environment such as changes in moisture content.
When calibrating the long path image strips from the JAXA EORC path image product, we also must assume that the relative calibration accuracy may vary in both the along-track and cross-track direction. We must therefore take care to insure that the average calibration correction applied to any given image is 0 dB, so as not to introduce absolute calibration errors when calibrating relative calibration errors. The most common relative calibration error that required correction was visibly apparent as “banding” in the radiometry, typically aligned in the cross-track direction. Absolute calibration errors were evaluated by comparing individual images with the average image brightness of the multi-temporal stack of images Ia, then comparing with the radar image brightness in adjacent UTM grid zones; sometimes several iterations of calibration were required before the imagery converged to a stable value.
Two simple methods were used to identify and evaluate absolute calibration errors. First, the ortho-rectified image segments can be stitched into a single image to form a mosaic. There are several available options for deciding which pixel from multiple images is preserved in the mosaic when a location on the ground is imaged in more than one pass. The option we chose was to have the far-range portion of the imagery take precedence over the near range-imagery. We chose this option because the backscatter from open water can be more variable in the near range due to wind roughening of the water surface. We ignored zero-fill areas. Second, after a mosaic is constructed, it sometimes is visibly apparent that adjacent images have a significant difference in brightness. This manifests as a banding effect within the mosaic and may make it problematic to correctly classify the status of inundation in wetland areas. We therefore compared individual orthorectified image strips with the average image brightness of all the images within the UTM grid-zone, then performed the adjustments described below.
The image brightness can vary for a variety of reasons. In addition to environmental factors, the instrument calibration may be in error, or there may be processing errors introduced at some stage. Given that the radar backscatter of targets varies with incidence angle and with target type, and given that ScanSAR data have a wide range of incidence angles within a swath (from 20°+ to 40°+), some banding may be due to the varying nature of the scattering of whatever is on the ground. Recent changes in moisture content of vegetation and/or ground soils can result in significant changes in backscatter as well [
34]. In the context of making it easier to identify locations of inundated wetlands, this change in brightness, whatever its cause, can be compared with adjacent images or an image average, and an empirical adjustment performed. This may, however, obscure physical signatures in the data. Changes in backscatter texture and contrast due to some of these effects, in particular those due to varying incidence angles within an image, cannot be easily corrected.
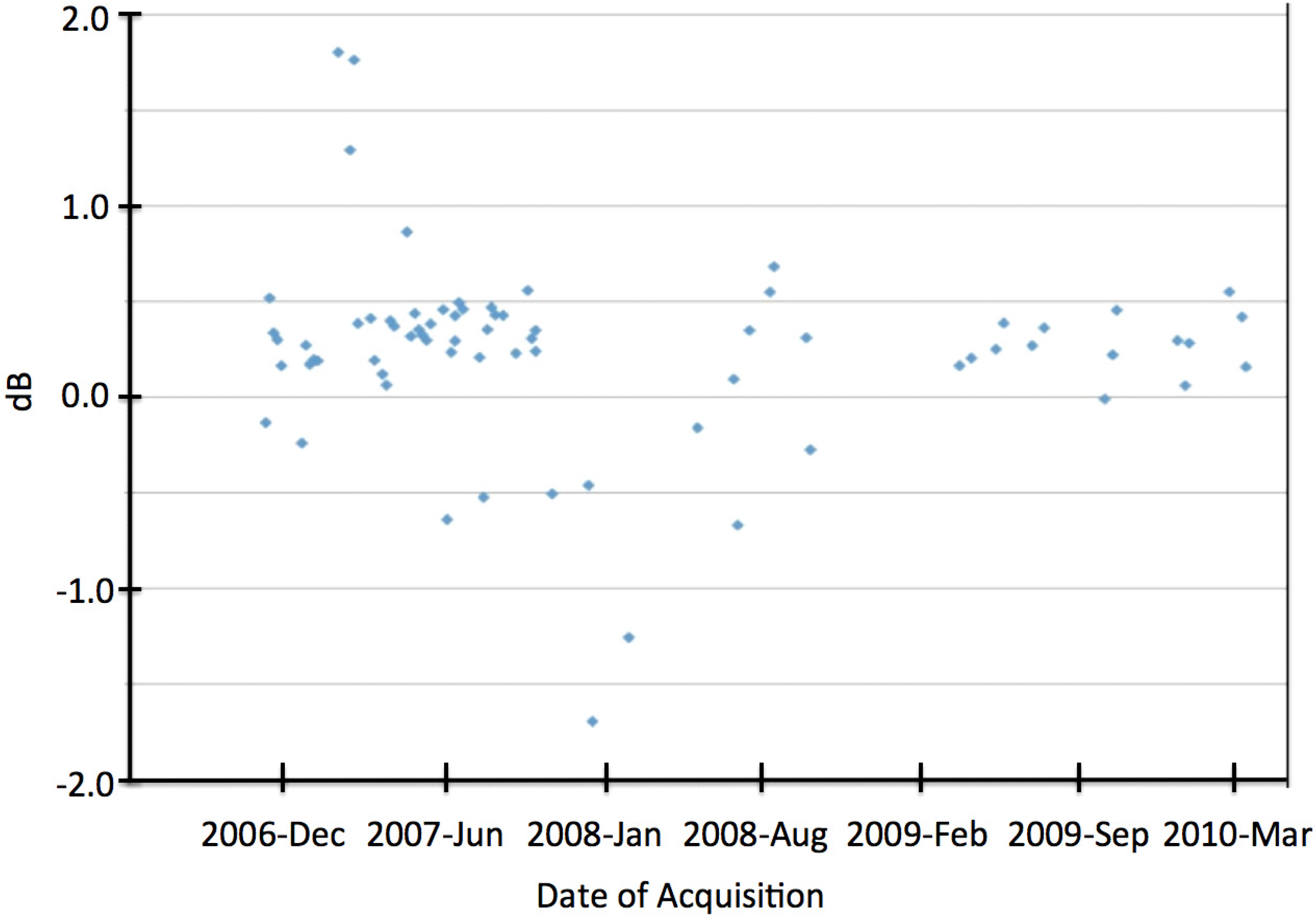
To examine this phenomenon more fully, 70 ScanSAR image strips were analyzed from UTM grid-zone tile 19 M in South America. For each pixel in the tile, the mean and standard deviation of the radiometrically corrected backscatter values were calculated, as well as the ratio of the standard deviation to the mean. If this ratio was less than 0.3 (which we found by observation typically indicated that the pixel was not predominately open water or occasionally inundated vegetation), the mean difference between the mean value and the individual value was determined. For these 70 ScanSAR image strips within tile 19 M, millions of pixels satisfied this criterion. The average mean-difference for each ScanSAR image strip was then calculated and plotted as a function of acquisition date (
Figure 2).
Figure 2.
Average mean-difference between average image brightness and each of 70 ScanSAR image strips in UTM grid-zone tile 19M.
Figure 2.
Average mean-difference between average image brightness and each of 70 ScanSAR image strips in UTM grid-zone tile 19M.
As can be seen from
Figure 2, the mean difference typically varied less than 0.5 dB, with occasional divergence of almost 2 dB. For each UTM grid zone, the temporal sequence of imagery was examined for each path, and when necessary, an empirical correction to the absolute calibration was applied. Images from adjacent UTM grid zones were then visually compared to insure that systematic bias was not introduced.
We expected that these radiometric and geometric terrain correction as well as other calibration adjustments when applied to the ALOS PALSAR data provide a more robust calibrated product for classification of inundation.
2.4. Mosaicking
Mosaicking involves combining together orthorectified and calibrated image products into a single calibrated image product. Evaluation of the image mosaic products is helpful for determining processing and acquisition gaps, identifying residual calibration errors, visualization of the data, and inundation product development. For this work, we produced a multi-temporal image mosaic for the entire study region of South America, where each pixel on the ground represented the average of all SAR image pixels for that location on the ground. The advantage of this type of mosaic is that it represents a time-averaged history of each image pixel. Even if the temporal sampling interval is erratic, if the time sequence is long enough, the average brightness will be representative of the typical state of that pixel. The impacts of random calibration errors in the individual image segments are reduced through the averaging process. The disadvantage of this type of mosaic is that the actual temporal uniqueness of each SAR image is lost, as well as variation due to incidence angle. However, if the individual image segments are preserved as well, it is still possible to temporally track environmentally distinguishable changes. One advantage of all mosaicked products is that mosaicking eliminates overlapping coverage, simplifying the interpretation of the imagery.
A Basic Observatory Strategy (BOS) for ALOS PALSAR was implemented by JAXA to facilitate temporally consistent acquisitions of data by PALSAR [
22]. The BOS allocates the ALOS observations within its 46-day orbit cycle such that certain combinations of regions and modes were given high priority for scheduled observations. However, the success rate for this strategy varied slightly by region, mode and time period.
To quantify the typical success rate, we examined intervals between successive ScanSAR acquisitions, where the intent was to image each pixel at least once every 46 days for a randomly selected 1° by 1° area in South America (coordinates 7°S, 65°W) over an 18-month time period. The average interval between acquisitions somewhere in this region was 33 days. However, due to scheduling and other conflicts, there was one gap of 128 days and another gap of 90 days. A total of 18 ScanSAR acquisitions crossed this zone during this time period. The temporal sampling for each ground location was uneven, despite the use of an observing strategy designed to increase the likelihood of temporally consistent observations.
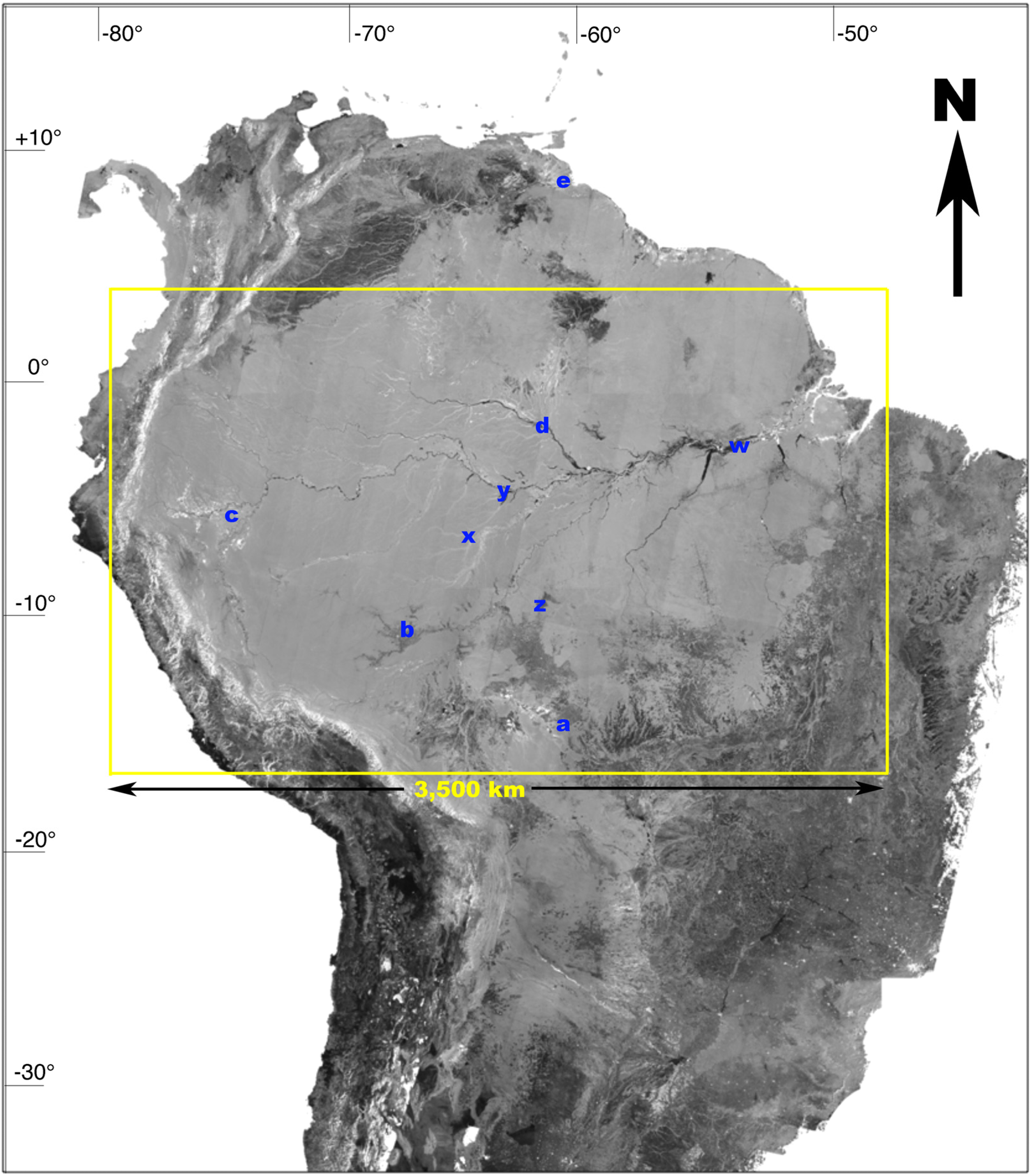
Once the mosaic was constructed and calibrated from the slant range path images, a simple stitching algorithm for aggregating the UTM grid-zone tiles into a single image file could be used to obtain wider scale image mosaics. We generated multi-temporal ScanSAR mosaic of South America from 323 ScanSAR path images acquired between late-2006 and mid-2010 (
Figure 3). This mosaic is a time-averaged image and, therefore, not necessarily straightforward to interpret. However, it clearly delineates areas of interest for studying wetland dynamics using the individually ortho-rectified and calibrated path images. Martinez and Le Toan [
35] showed that temporal filtering plus some spatial filtering increased the equivalent number of looks for improved classification of the imagery.
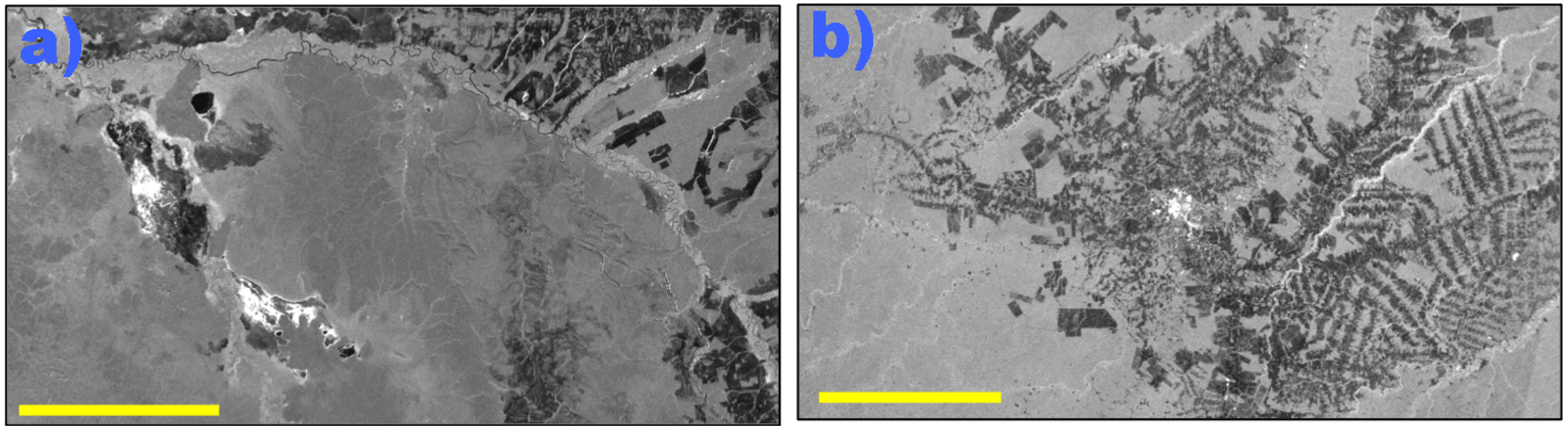
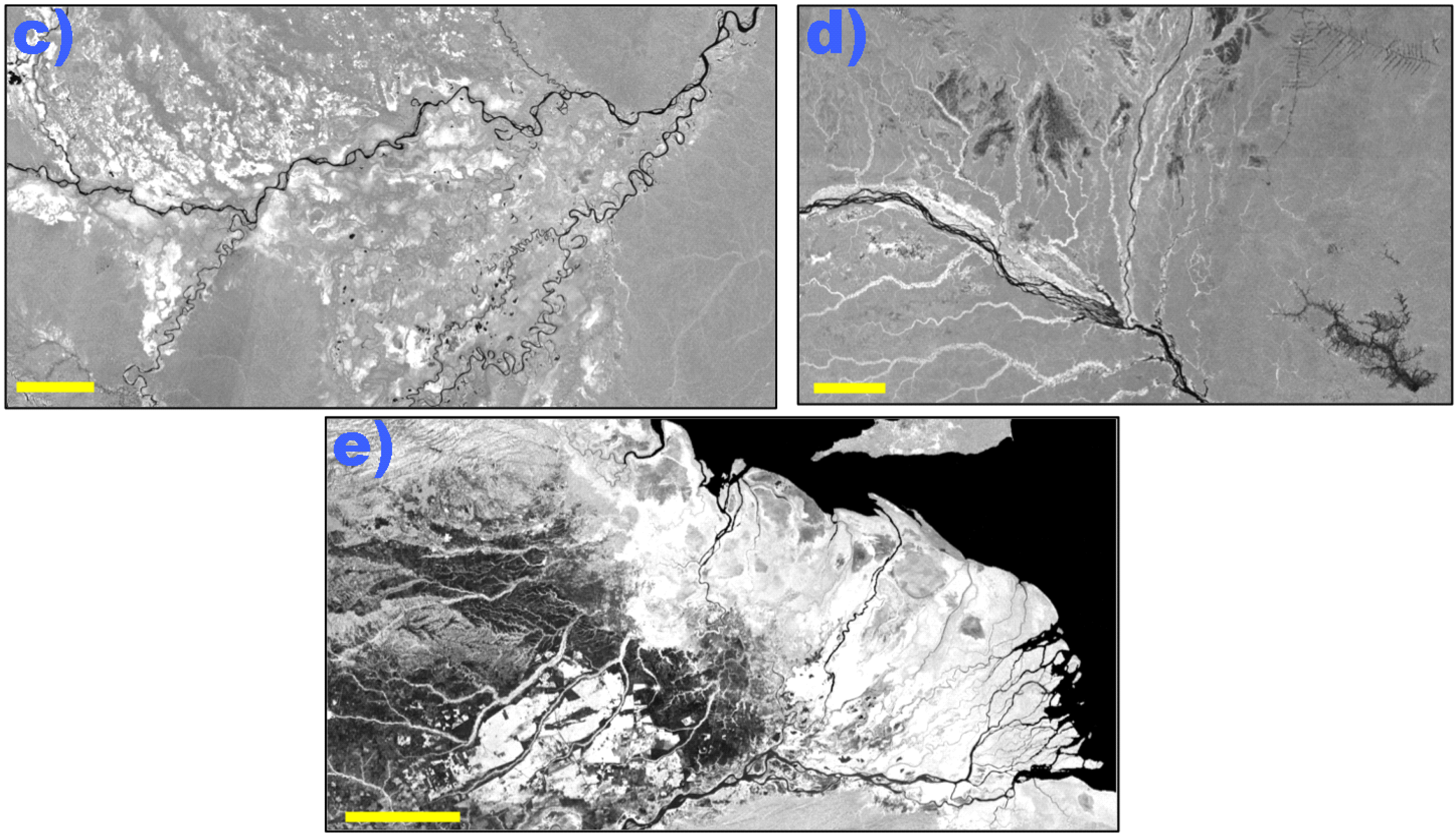
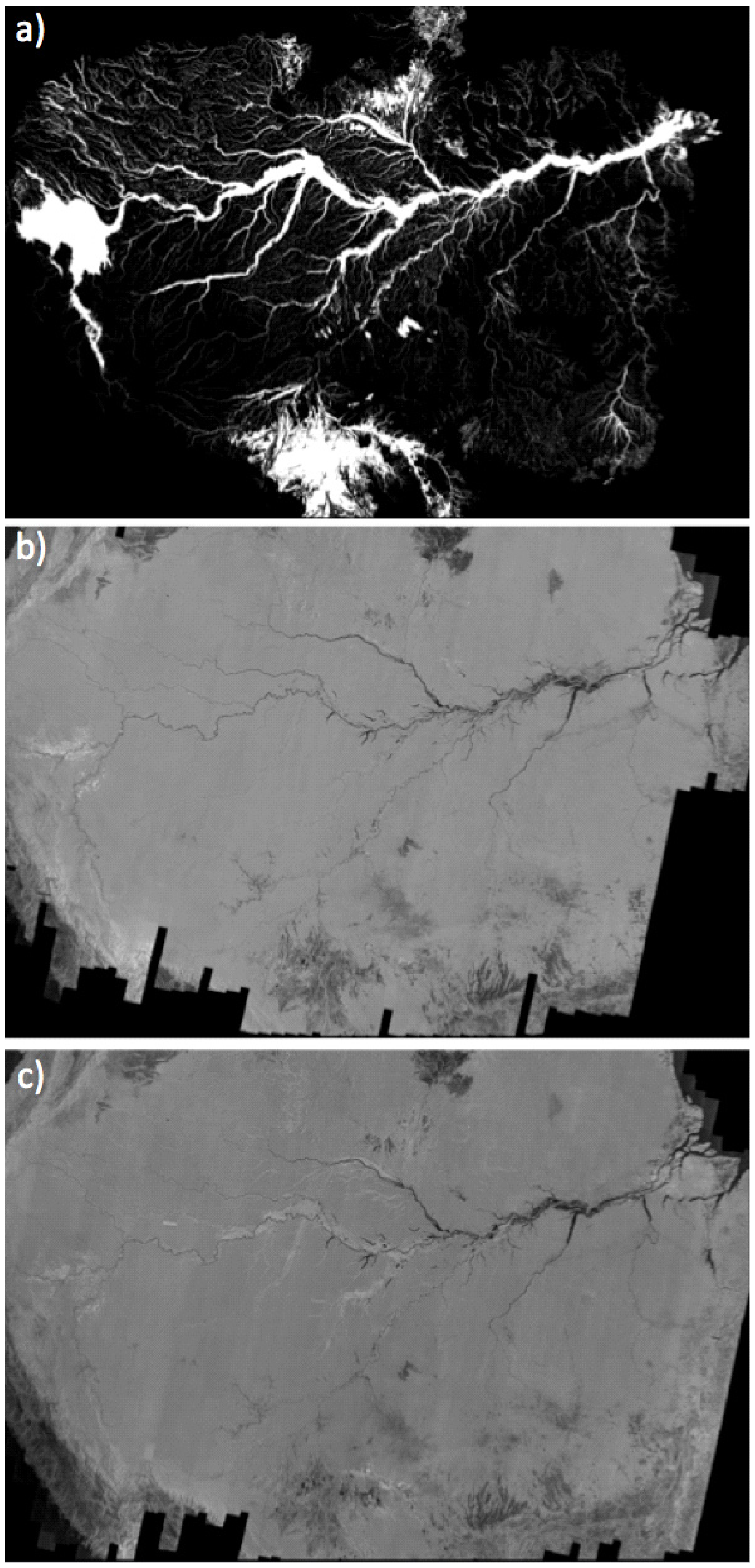
Figure 4 shows the detailed appearance of the multi-temporal ScanSAR image mosaics at full resolution (3 arc seconds, or approximately 100 m). Due to the higher number of looks at each pixel, the image contrast is high compared to individual ScanSAR image swaths, and often makes it possible to clearly distinguish open water from sparsely vegetated areas and low-stature vegetated areas (which we will henceforth call “low vegetated areas”), and different gradations of vegetation density and height, as well as clearly signifying those areas that experience inundation during some of the ALOS PALSAR acquisitions.
Figure 3.
Orthorectified ScanSAR mosaic of most of South America, late-2006 to mid-2010. Colored letters correspond to details shown in subsequent figures. © JAXA,METI.
Figure 3.
Orthorectified ScanSAR mosaic of most of South America, late-2006 to mid-2010. Colored letters correspond to details shown in subsequent figures. © JAXA,METI.
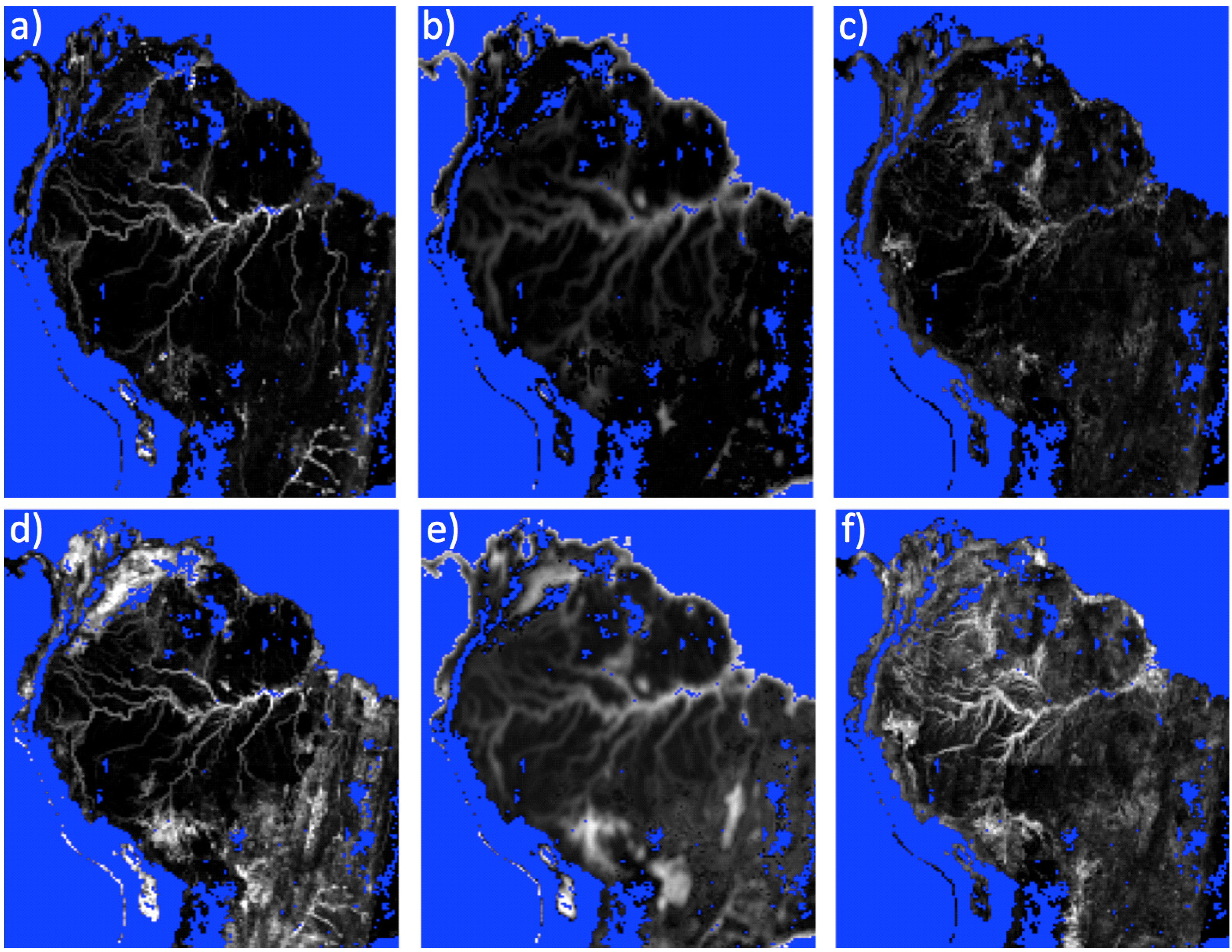
Figure 4.
Yellow scale bar corresponds to 50 km, and the location of each sub-figure is shown in
Figure 3. Generally, we may associate the brighter areas as caused by double-bounce reflections in inundated vegetation areas or urban regions. Water and bare soil appear dark and forest areas are medium-grey shades. Locations are indicated in
Figure 3. (
a) Noel Kempff National Park, Bolivia; (
b) Deforestation near the city of Rio Branco, Brazil (bright area at center) and inundated Iquiri River floodplain; (
c) Pacaya-Samiria Reserve, Peru; (
d) middle Rio Negro; and (
e) Orinoco Delta. © JAXA, METI.
Figure 4.
Yellow scale bar corresponds to 50 km, and the location of each sub-figure is shown in
Figure 3. Generally, we may associate the brighter areas as caused by double-bounce reflections in inundated vegetation areas or urban regions. Water and bare soil appear dark and forest areas are medium-grey shades. Locations are indicated in
Figure 3. (
a) Noel Kempff National Park, Bolivia; (
b) Deforestation near the city of Rio Branco, Brazil (bright area at center) and inundated Iquiri River floodplain; (
c) Pacaya-Samiria Reserve, Peru; (
d) middle Rio Negro; and (
e) Orinoco Delta. © JAXA, METI.
2.5. Image Classification
The mechanisms responsible for the detection of inundation by L-band SAR are well known (e.g., [
2,
9,
14,
17,
18,
35]). Microwave energy scatters off open water, generally specularly reflecting off of the smooth water surface away from the radar. The resulting radar backscatter is low. Wind roughening can cause the backscatter from inland waters to increase, brightening the radar image. Where it is possible to choose from a catalogue of images, giving preference to those that imaged the target from larger incidence angles can often minimize this problem. Radar parameters such as the Signal to Noise Ratio (SNR) can affect the ability to distinguish open water from other dark targets such as bare ground. However, in general it has been found possible to identify open water in L-band radar imagery (e.g., [
36]) due to the specular scattering mechanism. More interesting is the ability to distinguish inundation beneath a vegetation canopy. The microwaves transmitted by the radar, especially horizontally polarized radiation, scatter off both the flat open water surface and the vertically emerging vegetation (
i.e., a “double-bounce” reflection). The latter results in a large fraction of the transmitted power being reflected directly back to the radar. The penetration by the microwaves through the overlying vegetation canopy can be quite effective and, despite volume scattering by the vegetation canopy and attenuation of the radar signal by the vegetation canopy, there is a strong return back to the radar. However, inundated vegetation is not the only landscape feature that results in double-bounce reflections. For instance, urban areas often exhibit double-bounce reflections off streets and vertically oriented building structures (when the street is oriented parallel to the flight track of the radar system). Additionally, double-bounce is not the only mechanism resulting in bright image returns in an HH image; an extremely rough surface such as that often found in lava flows, also may produce very bright returns.
The most common method by which scientists have been using L-band SAR data to detect inundated vegetation is through examination and classification of HH polarized imagery. One technique is to determine image brightness thresholds that are indicative of inundation (e.g., [
1,
18]). Other approaches employ image segmentation to classify the inundation characteristics based on characteristics of the spatially segmented region, though still dominantly based on the HH backscattered brightness [
1]. Due to the extensive collection of multi-temporal ALOS ScanSAR data, we can also include the multi-temporal observations as factors in the classification of the imagery.
Our objective was to use established algorithms for identifying inundation extent. Previous work has shown that (1) certain L-band brightness thresholds identify inundation and (2) dramatic temporal changes in L-band brightness can often indicate a change in inundation state. We describe here a classification approach used to identify inundation classes in South America from ALOS PALSAR acquired between late-2006 and mid-2010 while in ScanSAR mode. Because of uneven temporal sampling, a consistent time sequence showing periodic change in inundation for the entire Amazon basin was problematic. However, we assumed that after four years of numerous, yet sporadic, ScanSAR acquisitions, each pixel area on the ground would have been imaged in all inundation states that it might experience: not inundated, inundated vegetation, and/or open water. This was similar to the approach of Martinez and le Toan [
35], where multi-temporal JERS-1 data were classified into several different inundation classes.
We did not attempt to explicitly identify aquatic macrophytes, as the range of L-band backscatter values that characterize floating macrophytes overlaps with other more distinct conditions. Aquatic macrophytes are believed to occupy between 5% and 8% of the wetland areas of the central Amazon Basin [
1].
We first produce a multi-temporal radar backscatter image Ia, averaging the data from each acquisition, as described previously. When the terrain land cover does not change, the speckle from the individual ScanSAR images is reduced. For those areas experiencing environmental changes, the average will reflect the varying backscatter at the various time periods represented by the imagery. However, since open water and inundated vegetation are at opposite ends of the range of radar backscatter values, the average will tend to show evidence of these inundation events, especially if they are persistent.
The first step was to examine
Ia, and use threshold image brightness values to determine an initial class. The threshold backscatter values were obtained from Arenson
et al. [
18]. Examining ALOS ScanSAR data over the Curuai Lake floodplain, Arneson
et al. obtained GPS-located photographs at one-degree incidence angle intervals across a ScanSAR image swath acquired at similar water level stage as the ScanSAR data. Using Landsat-5 TM data, Arneson
et al. determined land cover type. They then used image segmentation techniques, to determine the range of backscatter values corresponding with various land cover types including non-flooded forest, flooded forest, open water, bare soil, and water bodies with emergent macrophytes. These backscatter values form the basis for the threshold image brightness values that we used in determining an initial class.
We used the ESA GlobCover 2009 land cover classification product [
37] sampled every 300 m to establish the location of urban areas that are difficult to distinguish from flooded vegetation based on radar backscatter values alone. See
Table 1 for the criteria for each of eight classes. These initial classes may represent a typical land cover/inundation state for the period in question, but in areas where the inundation state is variable, this initial class can only represent one of the possible inundation states that those areas may experience. In addition, an area that experiences both open water and inundated vegetation conditions on average may indicate non-inundated forest or low vegetation from the averaged radar backscatter. Individual ScanSAR acquisitions must be examined to clarify the variability, where the ratio of each ScanSAR image to
Ia was used to indicate the likelihood that the inundation state found in the initial classification was variable.
Table 1.
Initial class identification from multi-temporal average radar backscatter and ESA GlobCover land cover classification product.
Table 1.
Initial class identification from multi-temporal average radar backscatter and ESA GlobCover land cover classification product.
| Initial Class | Radar Backscatter (dB) | GlobCover Class |
|---|
| Urban | Ia > −5.9 | 190 1 |
| Flooded vegetation | Ia > −5.9 | Any |
| Forest | −5.9 > Ia > −9 | Any |
| Low vegetation | −9.0 > Ia > −13.7 | Any |
| Open water/low veg or bare | −13.7 > Ia > −19.0 | Any |
| Open water 1 | Ia < −19 | 210 2 |
| Open water 2 | Ia < −19 | Any |
| Topographic slope mask (if SRTM height difference to adjacent pixels exceeds 18 m) | Any | Any |
For identifying change in inundation state from the typical (initial) classification, we needed to identify those pixels where the individual ScanSAR images indicate a change in scattering signature from that given by the initial class. As single ScanSAR images are speckled due to the small number of looks at the posted spacing, we applied a 3 × 3 moving average filter to these data. We refer to the ratio of these multi-looked ScanSAR image pixel values to Ia as Δb.
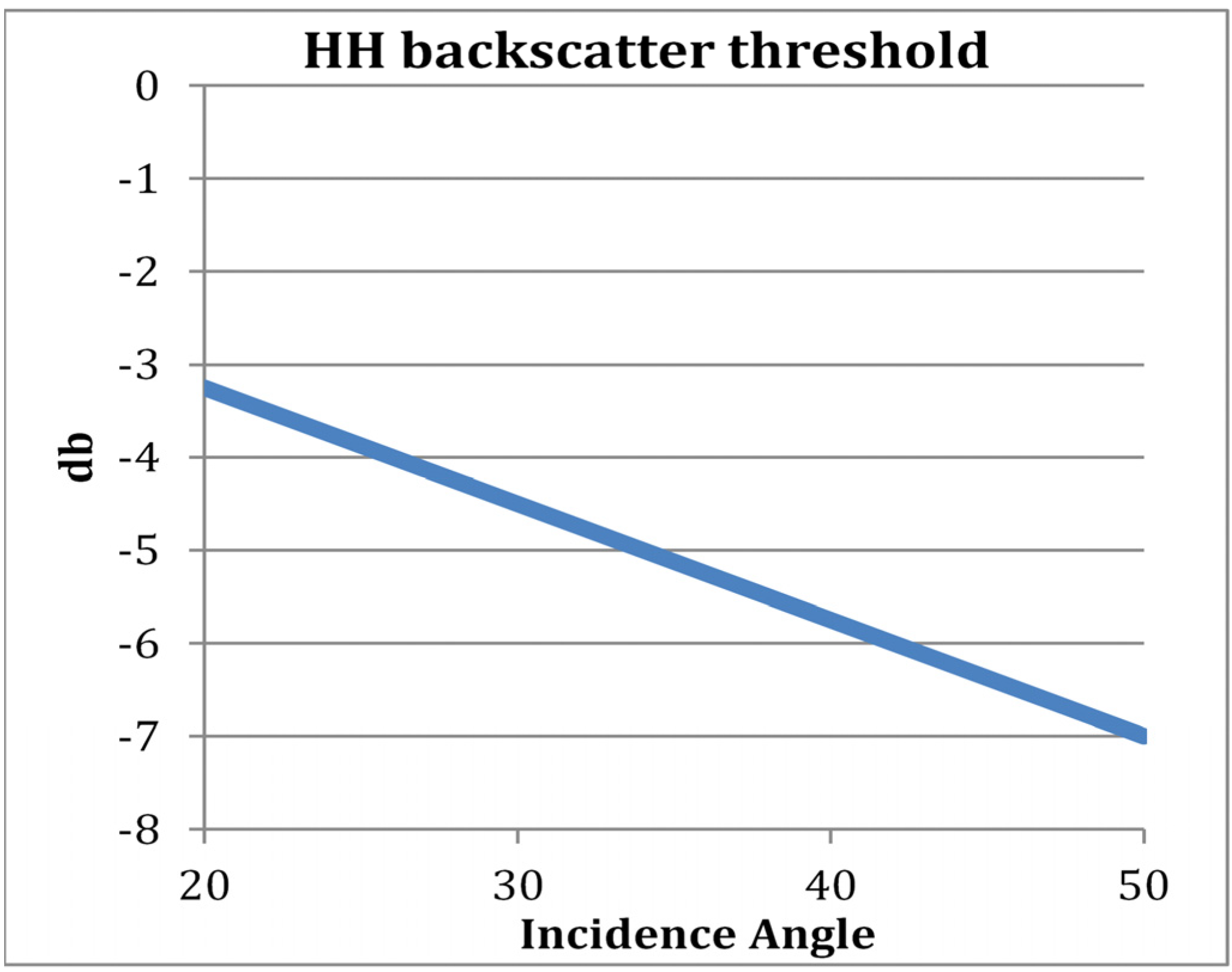
If the initial class for a set of pixels was forest, the typical state of those pixels as revealed by Ia corresponded with what we would expect in radar backscatter values for non-inundated forest. However, if one or more of the ScanSAR images was significantly brighter than Ia in these areas it indicated there had been an increase in double-bounce scattering for those ScanSAR image dates, which we therefore identified as being associated with inundation. If the initial class was open water, and we observed a large positive Δb, we assumed it was due to an increase in volume scattering and associated with vegetation rather than open water. In some cases, the incidence angle may have influenced the interpretation of changes in relative brightness. An important case was variations in brightness with incidence angle due to inundated vegetation. A variable threshold for inundated vegetation applied to the individual image strips was found to improve the classification consistency between near and far-range results, and could be used to incrementally improve the multi-temporal image classification.
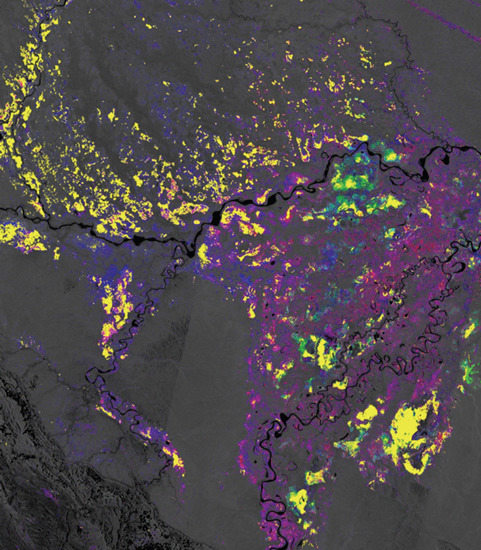
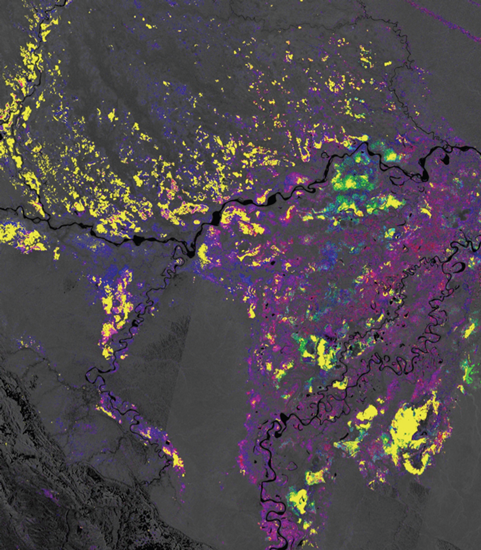
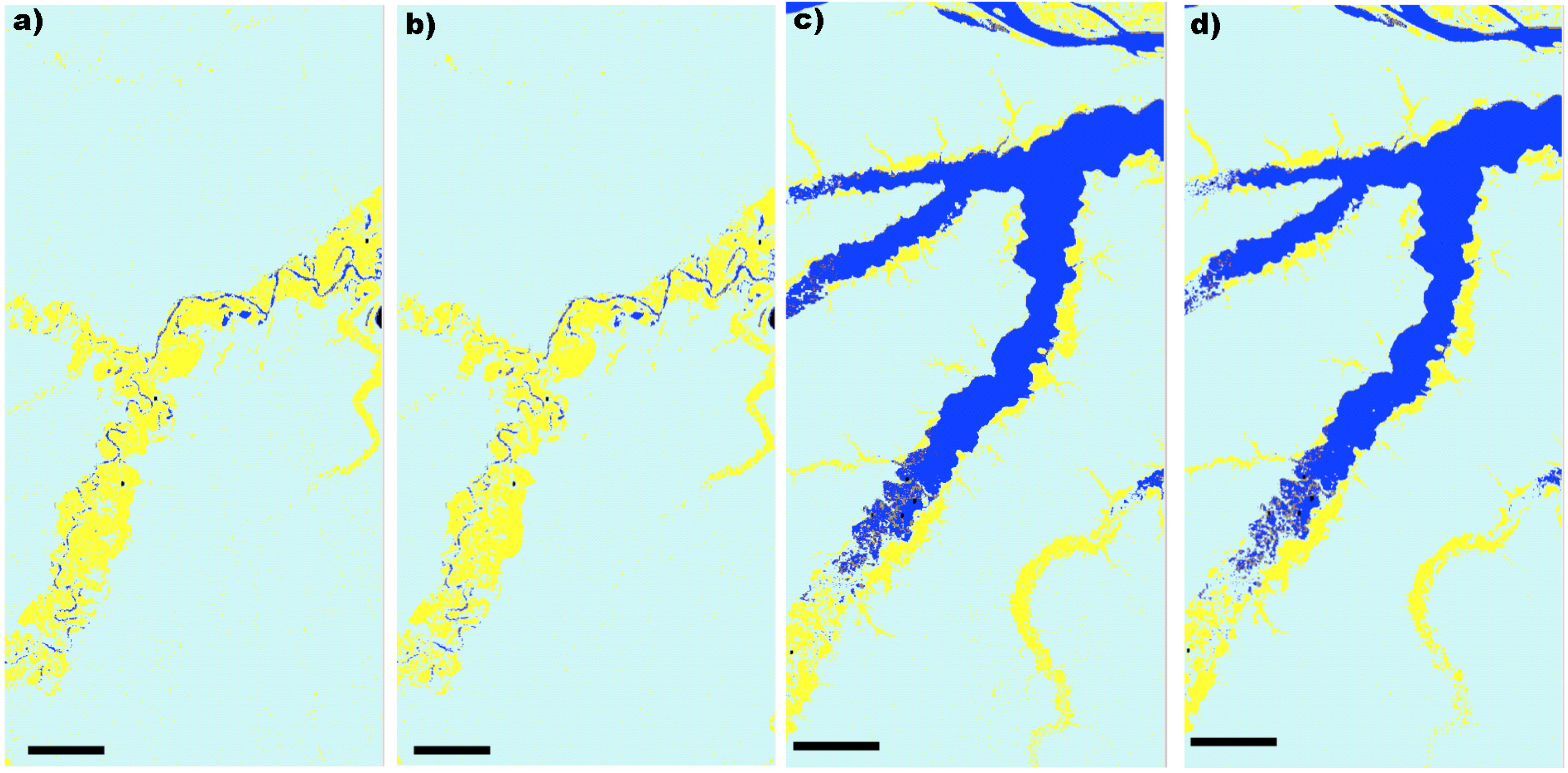
A variable threshold for inundated vegetation as a function of incidence angle was determined by examining image strips in the near-range/far-range overlap in the ScanSAR imagery acquired just five days apart (see
Figure 5). Using this simple empirically derived threshold
versus incidence angle,
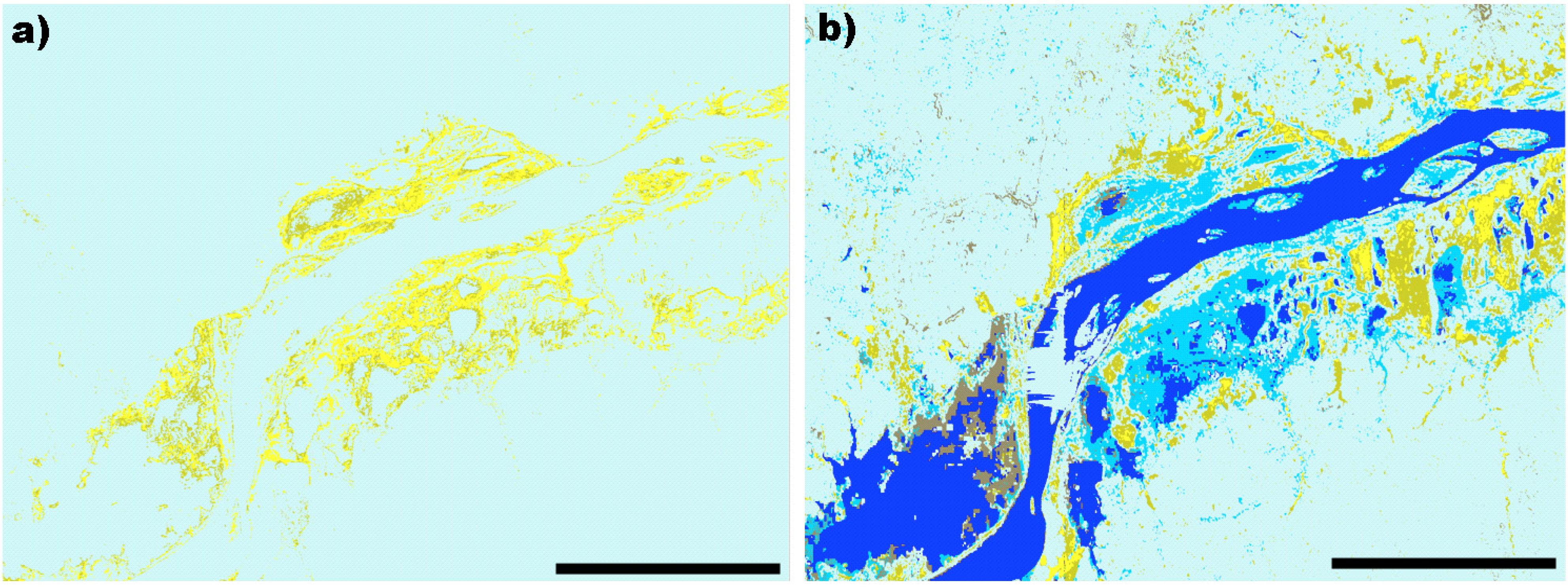
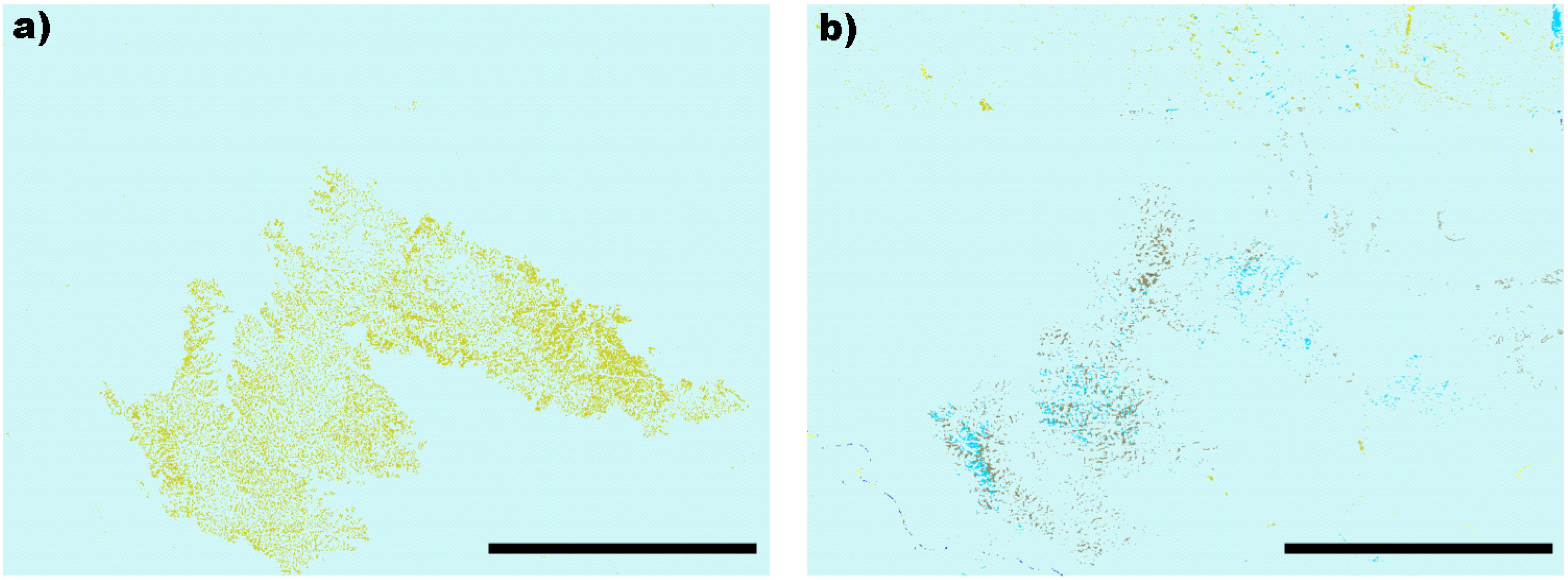
Figure 6 shows a comparison of the inundation classification of two pairs of images acquired five days apart.
Figure 6a,b shows a comparison of the ScanSAR mid-swath classification with that derived from data acquired five days earlier in the near-swath range, and
Figure 6c,d shows a comparison of the ScanSAR mid-swath classification to that acquired five days later.
Figure 5.
HH backscatter threshold versus incidence angle for the detection of inundation, derived empirically such that similar classifications were obtained in the near and far range of overlapping images acquired five days apart.
Figure 5.
HH backscatter threshold versus incidence angle for the detection of inundation, derived empirically such that similar classifications were obtained in the near and far range of overlapping images acquired five days apart.
Figure 6.
Black bar indicates 10 km scale. (
a) Mid-swath classification from 27 June 2007 (coordinate: −5.98°, −64.83° shown by “x” in
Figure 3); (
b) near-swath classification from 22 June 2007; (
c) mid-swath classification from June 27, 2007 (coordinate −4.13°, −63.42° shown by “y” in
Figure 3); (
d) far-swath classification from 22 June 2007. Yellow indicates inundated vegetation and dark blue indicates open water. All other areas are unclassified.
Figure 6.
Black bar indicates 10 km scale. (
a) Mid-swath classification from 27 June 2007 (coordinate: −5.98°, −64.83° shown by “x” in
Figure 3); (
b) near-swath classification from 22 June 2007; (
c) mid-swath classification from June 27, 2007 (coordinate −4.13°, −63.42° shown by “y” in
Figure 3); (
d) far-swath classification from 22 June 2007. Yellow indicates inundated vegetation and dark blue indicates open water. All other areas are unclassified.
We also refined the open water classification based on the SRTM slope; if the class was bare ground or low vegetation, but the slope was zero, the class was changed to “SRTM open water”. This association may be made because the only exactly zero-gradient areas in the DEM in bare ground/low vegetation areas are those pixels manually edited by the National Geospatial-Intelligence Agency (NGA) to level the elevation of water bodies in version 2.1 of the SRTM DEM [
38]. This mainly impacted narrow river areas that were not captured as open water by the ALOS ScanSAR inundation classification. To address ambiguities in radar brightness between open water and some low vegetated and bare ground areas, we used the ESA GlobCover 2009 land cover classification product to establish a secondary category for croplands, as the time sequence of L-band backscatter for harvesting and growth of croplands can mimic those due to inundation events.
The objective for the refinement in the classification described above was to change the initial classification results, when indicated, from a non-inundated class to an inundated class, or from an inundated class to an occasionally inundated class. A maximum and minimum inundation classification may now be derived.
Table 2 shows the criteria for the revised classification based on Δ
b for each available date, SRTM slope, and GlobCover class. There were other cases examined, such as inundated vegetation to open water transitions, but these other cases represented a very small percentage of the area classified.
Table 2.
Criteria for classification refinement.
Table 2.
Criteria for classification refinement.
| Initial Class | Condition | Final Class |
|---|
| Forest | Δb > 3 dB | Occasionally inundated vegetation |
| Inundated vegetation | Δb < −3 dB | Occasionally inundated vegetation |
| Inundated vegetation | Variable with incidence angle | Occasionally inundated vegetation |
| Low vegetation | Δb < −3 dB | Occasionally open water |
| Open water | Δb > 6 dB | Occasionally open water |
| Inundated vegetation | Δb < −12 dB | Variable inundation state |
| Low vegetation | Δb > 10 dB | Occasionally inundated vegetation |
| Forest | Δb < −10 dB | Variable inundation state |
| Any except topographic slope | Ia +Δb > −5.9 dB | Occasionally inundated vegetation |
| Any open water or inundated | Maximum SRTM slope = 0 | SRTM open water vegetation class |
| Any except topographic slope | 11 ≤ GlobCover2009 class ≤ 2011 | Crops |
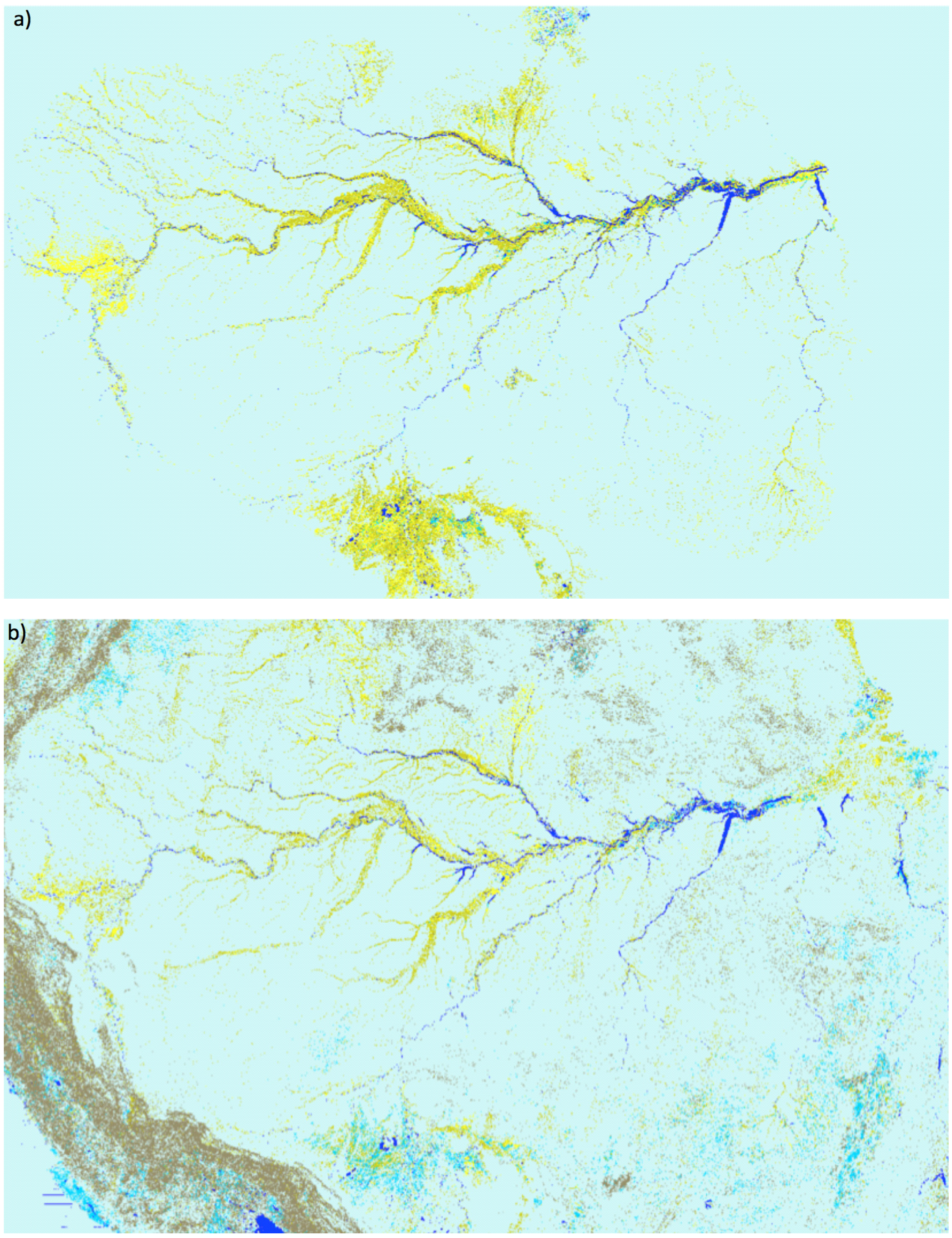
Figure 7 shows the resulting maximum and minimum inundation classification for those areas for which we had ALOS ScanSAR multi-temporal image coverage. Given we used a 3 × 3 spatial averaging filter to remove speckle noise from the individual ScanSAR image values, we estimate our classification of minimum inundation (
Figure 7b) was sensitive to inundation occurring at 1–10 hectare scales.
There are two areas in South America where the ALOS classification results are likely over-estimating the area of open water: south and east of the Amazon River Basin where many agricultural areas were not classified as such by GlobCover; and west of the Andes, where some desert areas, due to their dark radar signature, were classified as open water.
Figure 7.
Inundation classification late-2006 to mid-2010; same location as shown in
Figure 3. (
a) maximum inundation, (
b) minimum inundation. Black-topographically excluded;
dark blue: open water;
light blue: open water maximum;
green: not inundated;
yellow: inundated vegetation;
light yellow: inundated vegetation maximum;
brown: croplands from GlobCover 2009;
grey: unclassified.
Figure 7.
Inundation classification late-2006 to mid-2010; same location as shown in
Figure 3. (
a) maximum inundation, (
b) minimum inundation. Black-topographically excluded;
dark blue: open water;
light blue: open water maximum;
green: not inundated;
yellow: inundated vegetation;
light yellow: inundated vegetation maximum;
brown: croplands from GlobCover 2009;
grey: unclassified.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












