
Generation of Land Cover Maps through the Fusion of Aerial Images and Airborne LiDAR Data in Urban Areas

Abstract
:1. Introduction
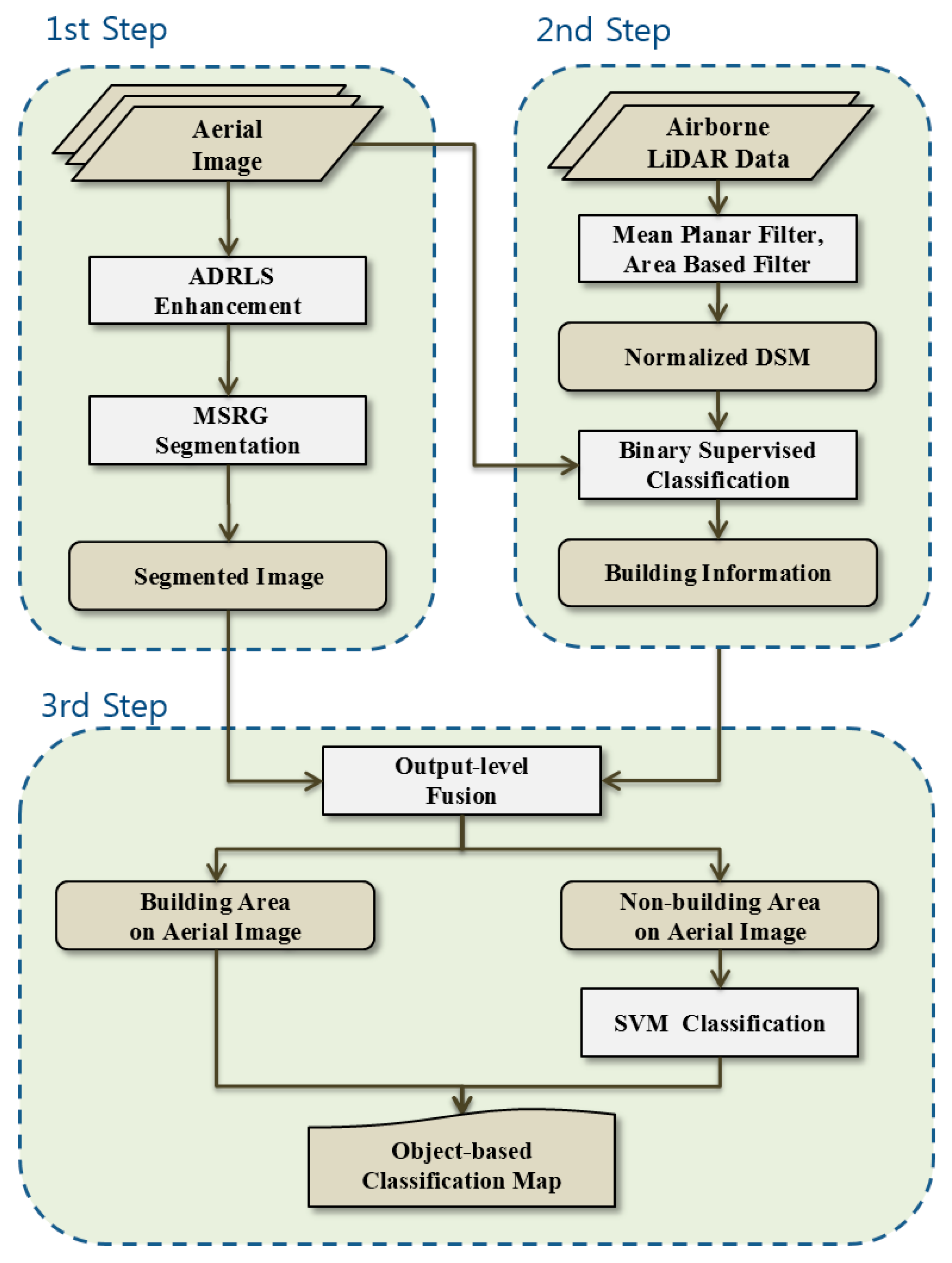
2. Materials and Methods
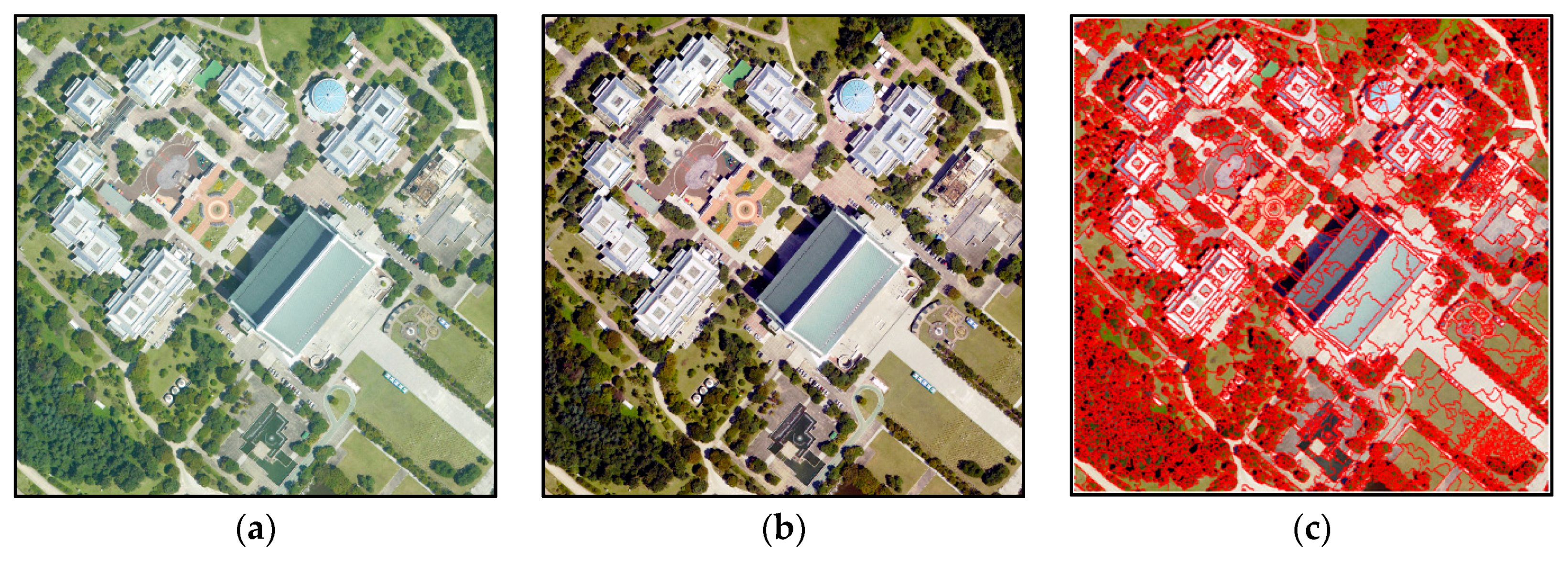
2.1. Image Segmentation of Aerial Image
2.1.1. Adaptive Dynamic Range Linear Stretching Image Enhancement
- L: radiometric resolution
- CDF: the total number of pixels in the sub-histogram
- CDFi: the total number of pixels in the i-th sub-histogram
- L: radiometric resolution
- k: split value (the number of sub-histograms).
- α: scale factor.
- Xn: The n-th pixel brightness values of the input image histogram
- Yn: Output pixel value of Xn
- a: Radiometric resolution/use range of the input image
- b: Horizontal translation variables
2.1.2. Modified Seeded Region Growing (MSRG)
- n: total number of neighboring pixels;
- ai: arbitrary pixel value in the window;
- aj: represents the j-th neighboring pixel value where j = 1 to n;
- pi: the ratio of an arbitrary pixel value over the summation of all pixel values
- N: total number of bands;
- qk: the ratio of arbitrary pixel value over total pixel value;
- bk: pixel value of the central pixel in the local window of the individual bands;
- Ek: entropy measure of the central pixel in the local window of the individual bands.
- : spectral vector of each region;
- : vector of adjacent neighboring pixel;
- Gc: the mean edge strength of each region;
- Gp: the edge magnitude of the multispectral edge map (H).
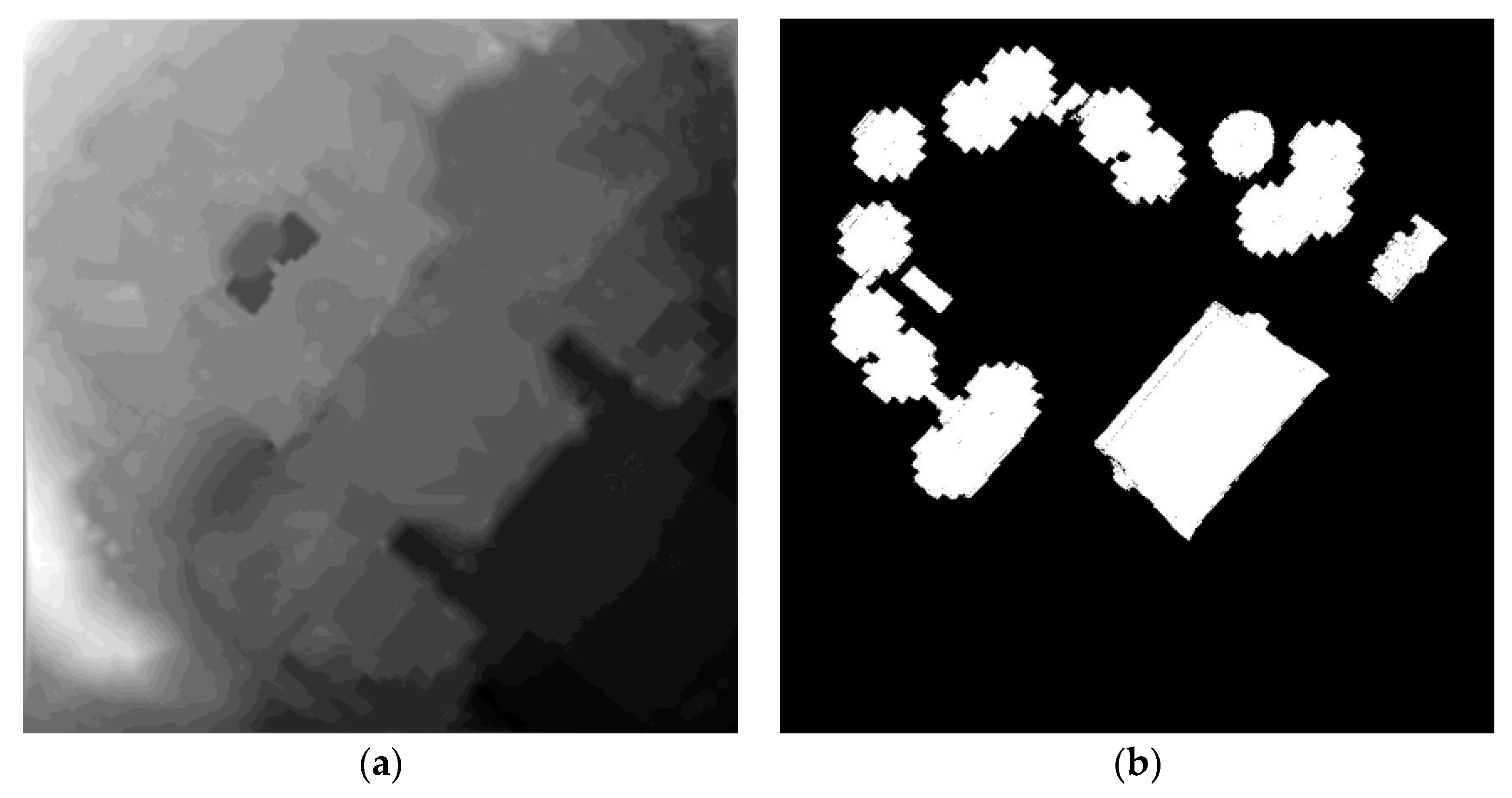
2.2. Extraction of Building Information from Airborne LiDAR Data
2.2.1. Generation of DTM
- : mean plane created by the mean value of ;
- : height value of location (i, j).
2.2.2. Building Detection
- 1
- Perform supervised classification only for areas with tall objects
- 2
- Use nDSM as an additional band to the RGB bands of aerial images
- 3
- Classify into vegetation and non-vegetation
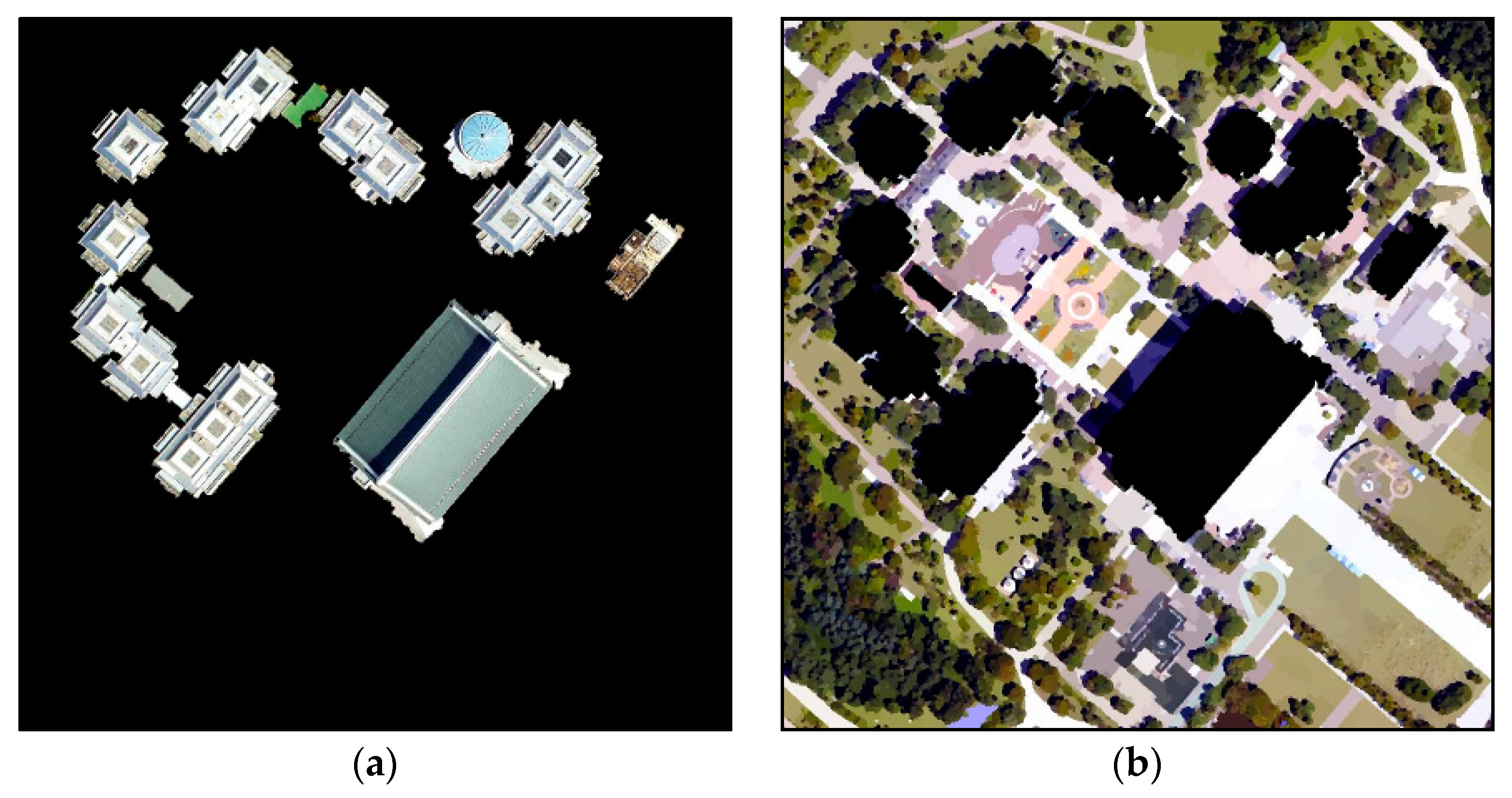
2.3. Output-Level Fusion and Generation of Classification Maps
- RoSi: ratio of the building area overlaid on the i-th segment;
- Building area: building area overlaid on the i-th segment;
- Segmenti: i-th segment area.
3. Data Used and Experimental Sites
4. Results and Discussion
4.1. Methods for Comparison
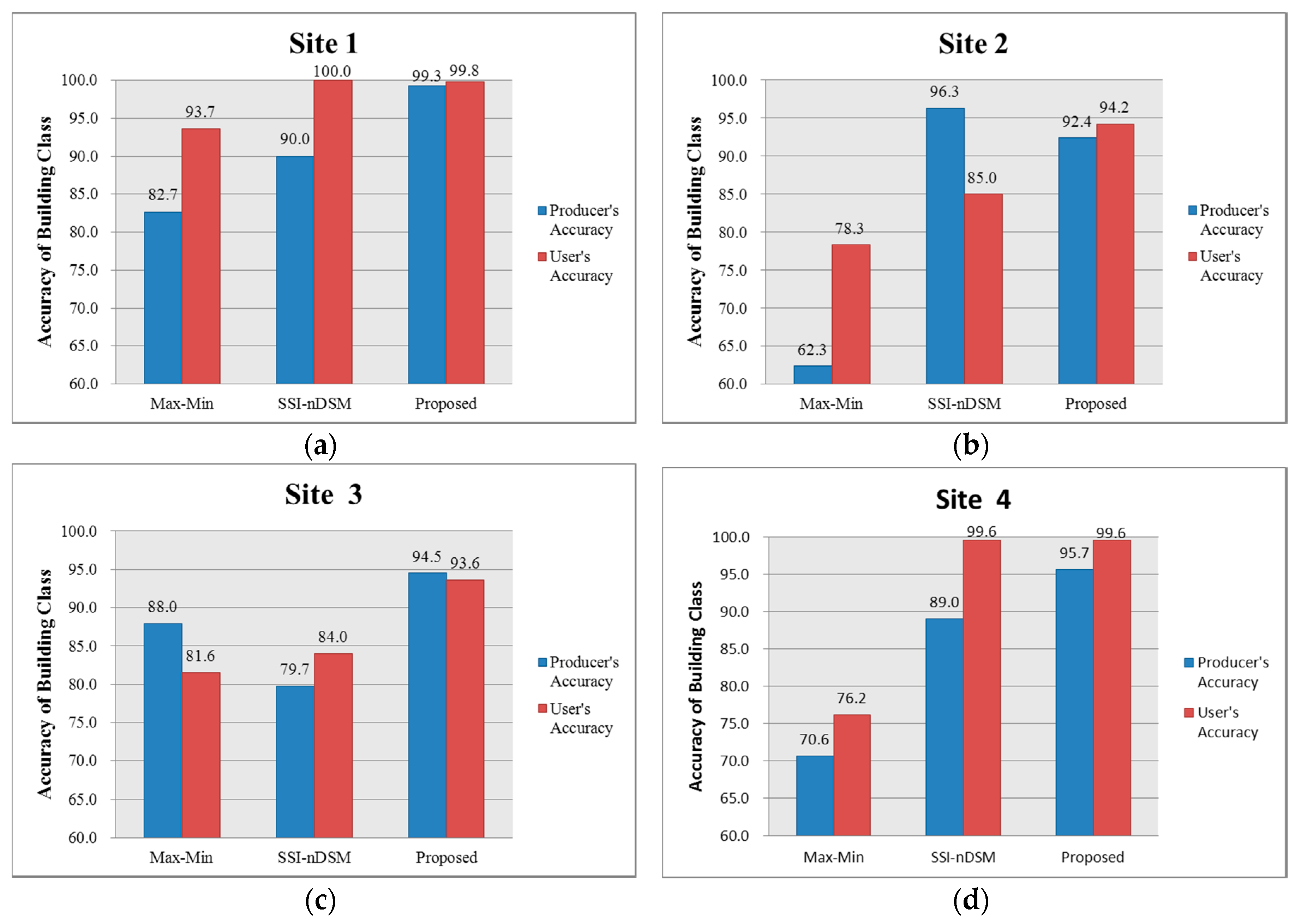
4.2. Accuracy Assessment
5. Conclusions
Conflicts of Interest
References
- Rashed, T.; Jurgens, C. Remote Sensing of Urban and Suburban Areas; Springer: Dordrecht, The Netherlands, 2010. [Google Scholar]
- Zhao, W.; Cheng, L.; Tong, L.; Liu, Y.; Li, M. Robust segmentation of building points from airborne LIDAR data and imagery. In Proceedings of the 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011.
- Hall, D.L.; Llinas, J. An introduction to multisensory data fusion. IEEE Proc. 1997, 85, 6–23. [Google Scholar] [CrossRef]
- Haala, N.; Brenner, C. Extraction of buildings and trees in urban environments. ISPRS J. Photogramm. Eng. Remote Sens. 1999, 54, 130–137. [Google Scholar] [CrossRef]
- Lee, D.S.; Shan, J. Combining lidar elevation data and IKONOS multispectral imagery for coastal classification mapping. Mar. Geod. 2003, 26, 117–127. [Google Scholar] [CrossRef]
- Dalponte, M.; Bruzzone, L.; Gianelle, D. Fusion of hyperspectral and LIDAR remote sensing data for classification of complex forest areas. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1416–1427. [Google Scholar] [CrossRef]
- Geerling, G.W.; Labrador-Garcia, M.; Clevers, J.G.P.W.; Ragas, A.M.J.; Smits, A.J.M. Classification of Floodplain Vegetation by Data Fusion of Spectral (CASI) and LiDAR Data. Int. J. Remote Sens. 2007, 28, 4263–4284. [Google Scholar] [CrossRef]
- Schenk, T.; Csathó, B. Fusion of LIDAR data and aerial imagery for a more complete surface description. Int. Archives Photogramm. Remote Sens. Spat. Inf. Sci. 2002, 34, 310–317. [Google Scholar]
- Hill, R.A.; Thomson, A.G. Mapping woodland species composition and structure using airborne spectral and LiDAR data. Int. J. Remote Sens. 2005, 26, 3763–3779. [Google Scholar] [CrossRef]
- Rottensteiner, F.; Trinder, J.; Clode, S.; Kubik, K. Using the Dempster–Shafer method for the fusion of LIDAR data and multi-spectral images for building detection. Inf. Fusion 2005, 6, 283–300. [Google Scholar] [CrossRef]
- Erdody, T.; Moskal, L.M. Fusion of LiDAR and Imagery for Estimating Forest Canopy Fuels. Remote Sens. Environ. 2010, 114, 725–737. [Google Scholar] [CrossRef]
- Holmgren, J.; Persson, Å.; Söderman, U. Species identification of individual trees by combining high resolution LiDAR data with multi-spectral images. Int. J. Remote Sens. 2008, 29, 1537–1552. [Google Scholar] [CrossRef]
- Kim, Y.M.; Chang, A.J.; Kim, Y.I. Extraction of building boundary on aerial image using segmentation and overlaying algorithm. J. Korean Soc. Surv. Geod. Photogramm. Cartogr. 2012, 30, 49–58. [Google Scholar] [CrossRef]
- Zhan, Q.; Molenaar, M.; Tempfli, K. Hierarchical image object-based structural analysis toward urban land use classification using high-resolution imagery and airborne LIDAR data. In Proceedings of the 3rd International Conference on Remote Sensing of Urban Areas, Istanbul, Turkey, 11–13 June 2002; pp. 11–13.
- Chen, Y.; Su, W.; Li, J.; Sun, Z. Hierarchical object oriented classification using very high resolution imagery and LIDAR data over urban areas. Adv. Space Res. 2009, 43, 1101–1110. [Google Scholar] [CrossRef]
- Yeom, J.H.; Lee, J.H.; Kim, D.J.; Kim, Y.I. Hierarchical land cover classification using IKONOS and AIRSAR images. Korean J. Remote Sens. 2011, 37, 435–444. [Google Scholar] [CrossRef]
- Han, Y.; Kim, H.; Choi, J.; Kim, Y. A shape-size index extraction for classification of high resolution multispectral satellite images. Int. J. Remote Sens. 2012, 33, 1682–1700. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Jensen, J.R.; Tullis, J.A.; Riordan, K.D.; Archer, C.M. Synergistic use of lidar and color aerial photography for mapping urban parcel imperviousness. Photogramm. Eng. Remote Sens. 2003, 69, 973–980. [Google Scholar] [CrossRef]
- Nordkvist, K.; Granholm, A.H.; Holmgren, J.; Olsson, H.; Nilsson, M. Combining optical satellite data and airborne laser scanner data for vegetation classification. Remote Sens. Lett. 2012, 3, 393–401. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, L.; Gong, W. Information fusion of aerial images and LIDAR data in urban areas: Vector-stacking, re-classification and post-processing approaches. Int. J. Remote Sens. 2011, 32, 69–84. [Google Scholar] [CrossRef]
- Abdullah-Al-Wadud, M.; Kabir, M.H.; Dewan, M.A.A.; Chae, O. A dynamic histogram equalization for image contrast enhancement. IEEE Trans. Consum. Electron. 2007, 53, 593–600. [Google Scholar] [CrossRef]
- Park, G.H.; Cho, H.H.; Choi, M.R. A contrast enhancement method using dynamic range separate histogram equalization. IEEE Trans. Consum. Electron. 2008, 54, 1981–1987. [Google Scholar] [CrossRef]
- Shiozaki, A. Edge extraction using entropy operator. Comput. Vis. Graph. Image Process. 1986, 36, 1–9. [Google Scholar] [CrossRef]
- Byun, Y.; Kim, D.; Lee, J.; Kim, Y. A framework for the segmentation of high-resolution satellite imagery using modified seeded-region growing and region merging. Int. J. Remote Sens. 2011, 32, 4589–4609. [Google Scholar] [CrossRef]
- Kim, Y.M.; Eo, Y.D.; Chang, A.J.; Kim, Y.I. Generation of a DTM and building detection based on an MPF through integrating airborne lidar data and aerial images. Int. J. Remote Sens. 2013, 34, 2947–2968. [Google Scholar] [CrossRef]
- Ma, R. DEM Generation and Building Detection from LiDAR Data. Photogramm. Eng. Remote Sens. 2005, 71, 847–854. [Google Scholar] [CrossRef]
- Koch, B.; Straub, C.; Dees, M.; Wang, Y.; Weinacker, H. Airborne laser data for stand delineation and information extraction. Int. J. Remote Sens. 2009, 30, 935–963. [Google Scholar] [CrossRef]
- Arroyo, L.A.; Johansen, K.; Armston, J.; Phinn, S. Integration of LiDAR and QuickBird imagery for mapping riparian biophysical parameters and land cover types in Australian tropical savannas. For. Ecol. Manag. 2010, 259, 598–606. [Google Scholar] [CrossRef]
- Chadwick, J. Integrated LiDAR and IKONOS multispectral imagery for mapping mangrove distribution and physical properties. Int. J. Remote Sens. 2011, 32, 6765–6781. [Google Scholar] [CrossRef]
- Committee of Codification of Law. Limit of Building Area; Ministry of Land, Infrastructure, and Transport: Sejong-si, Republic of Korea, 2011.
- Kim, Y.M.; Kim, Y.I. Improved classification accuracy based on the output-level fusion of high-resolution satellite images and airborne LiDAR data in urban area. IEEE Geosci. Remote Sens. Lett. 2014, 11, 636–640. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site | Coverage | Range of Height | Characteristics |
|---|---|---|---|
| 1 | 425 × 425 m | 0~58.8 m | Mixed area |
| 2 | 625 × 625 m | 0~63.4 m | Mixed area |
| 3 | 450 × 160 m | 0~53.2 m | Apartment area |
| 4 | 200 × 225 m | 0~74.1 m | Building area |
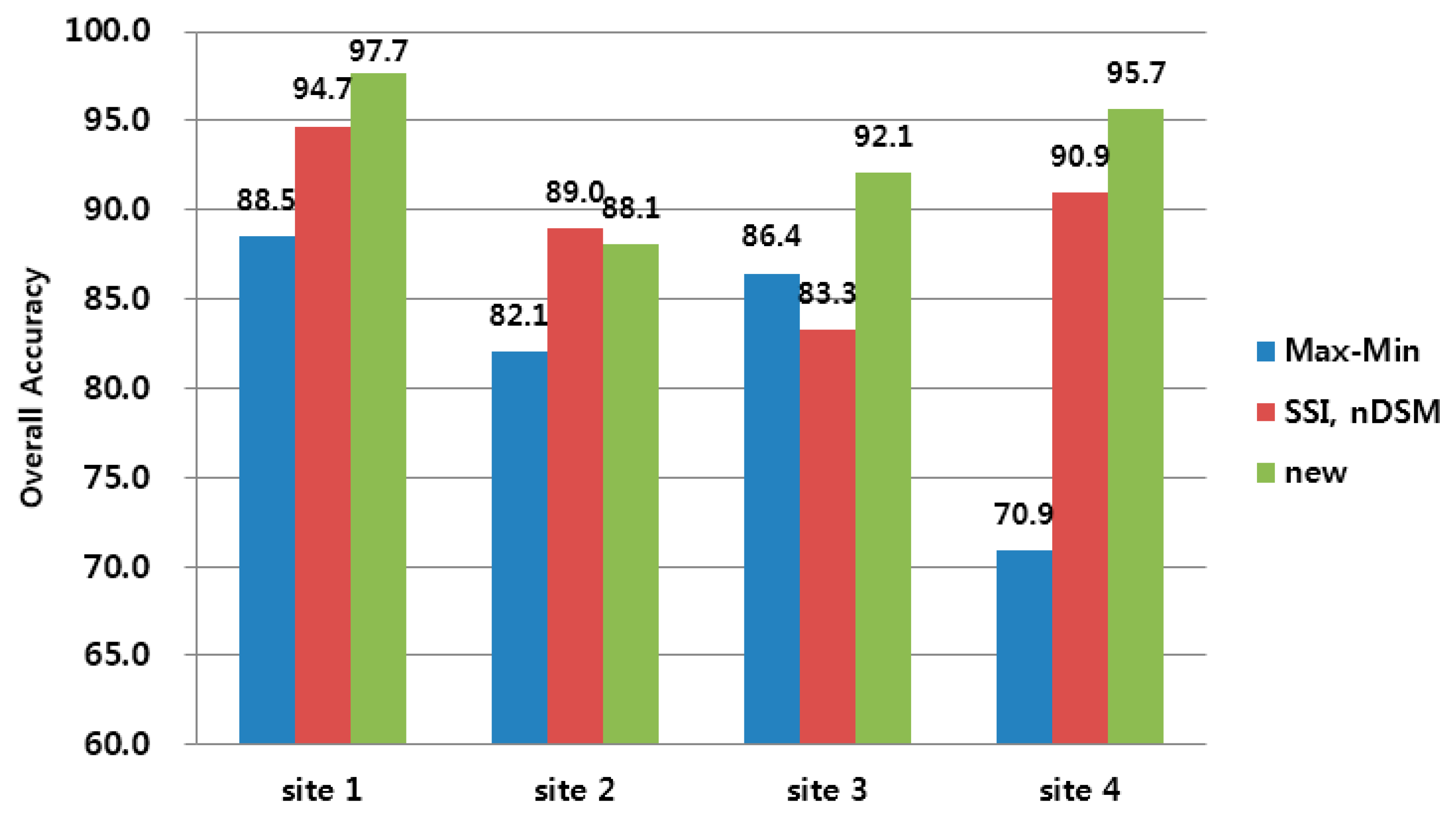
| Max-Min (%) | SSI-nDSM (%) | |
|---|---|---|
| Site 1 | 9.2 | 3 |
| Site 2 | 6 | −0.9 |
| Site 3 | 5.7 | 8.8 |
| Site 4 | 24.8 | 4.8 |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y. Generation of Land Cover Maps through the Fusion of Aerial Images and Airborne LiDAR Data in Urban Areas. Remote Sens. 2016, 8, 521. https://doi.org/10.3390/rs8060521
Kim Y. Generation of Land Cover Maps through the Fusion of Aerial Images and Airborne LiDAR Data in Urban Areas. Remote Sensing. 2016; 8(6):521. https://doi.org/10.3390/rs8060521
Chicago/Turabian StyleKim, Yongmin. 2016. "Generation of Land Cover Maps through the Fusion of Aerial Images and Airborne LiDAR Data in Urban Areas" Remote Sensing 8, no. 6: 521. https://doi.org/10.3390/rs8060521
APA StyleKim, Y. (2016). Generation of Land Cover Maps through the Fusion of Aerial Images and Airborne LiDAR Data in Urban Areas. Remote Sensing, 8(6), 521. https://doi.org/10.3390/rs8060521