1. Introduction
The Visible and Infrared Imaging Radiometer Suite (VIIRS) onboard the Suomi National Polar-Orbiting Partnership (S-NPP) satellite was successfully launched on 28 October 2011. VIIRS has 22 types of Sensor Data Records (SDR) at three spatial resolutions: including five imaging resolution bands (I-band, I1-I5, 375 m at nadir); 16 moderate resolution bands (M-band, M1-M16, 750 m resolution at nadir); one Day-Night-Band (DNB, 750 m constant spatial resolution across the scan). The radiometric and geometric calibration of S-NPP VIIRS have been performing well after majors calibration changes applied since launch and the SDRs achieved validated maturity in 18 March 2014 [
1,
2,
3].
More than five years of National Oceanic and Atmospheric Administration (NOAA) operational VIIRS SDRs have been produced by the Joint Polar Satellite System (JPSS) Interface Data Processing Segment (IDPS) ground processing to date. While long-term time series analysis requires consistent VIIRS data records, the historical calibration changes lead to inconsistencies in the VIIRS SDRs. To address this issue, VIIRS SDRs are in the process of being reprocessed at NOAA/Center for Satellite Applications and Research (STAR) since late 2016 using the latest calibration coefficients and corrections in the algorithms [
3,
4,
5,
6]. The reprocessed dataset will be distributed online for end-users to access.
The data volume for the VIIRS SDRs is huge, about 0.6 terabytes per day after compression. Reprocessing all the VIIRS SDRs requires a significant amount of computing resources. Particularly, reprocessing the geolocation data records are expected to consume more than 75% of disk space and CPU time. To ensure the quality of the reprocessed VIIRS SDRs, validation capabilities need to be established to monitor calibration improvements. Accurate VIIRS geolocation products are essential for many other VIIRS products such as imagery, clouds, aerosol, ocean color, sea surface temperature, and active fire. It is important to ensure the quality of the reprocessed geolocation products before the reprocessed VIIRS radiance, reflectance, and brightness temperature products can be reliably evaluated. Moreover, VIIRS observations have the finest spatial resolutions among all instruments onboard the S-NPP satellite, accurate VIIRS geolocations are also critical for evaluating geolocation errors in the Cross-track Infrared Sounder [
7], the Advanced Technology Microwave Sounder, and the Ozone Mapping and Profiler Suite.
The purpose of this paper is to present methods for evaluating major improvements in the NOAA STAR reprocessed VIIRS geolocation products. The history of VIIRS geometric calibration parameter changes in the NOAA IDPS operational processing were carefully examined to identify the optimal calibration parameters to be used in the reprocessing. Sample VIIRS geolocation products over a selected region were reprocessed to characterize major reprocessing improvements for I-bands and M-bands. Major improvement in DNB geolocation was studied by comparing DNB terrain corrected and non-terrain geolocations over nighttime point sources at sea level and over high altitude. The methodologies presented in this study can also be used to support JPSS-1 VIIRS that will be launched in late 2017. This paper is organized following this introduction as follows.
Section 2 introduces VIIRS geolocation products and the history of geometric calibration parameter updates in the NOAA operational processing. Methods for NOAA near real time (NRT) geolocation monitoring are introduced in
Section 3. Reprocessing improvements to the I-band/M-band geolocation products are presented in
Section 4. Major improvements to the DNB geolocation are highlighted in
Section 5.
Section 6 summarizes this study.
2. VIIRS Geolocation Products and Geometric Calibration Parameter Update History
VIIRS is a cross-track scanning radiometer that has a ~3060 km swath width at nominal satellite altitude of 829 km [
2]. Five VIIRS geolocation datasets are produced by the NOAA operational processing, including non-terrain corrected (ellipsoid) geolocation for I-bands (GIMGO) and M-bands (GMODO), terrain corrected geolocation for I-bands (GITCO) and M-bands (GMTCO), and DNB geolocation (GDNBO) [
8].
Table 1 summarizes these geolocation products. The VIIRS geometric calibration is based on models of the instrument, the Earth, and the spacecraft orbit [
9]. The core VIIRS geolocation algorithm intersects the VIIRS instrument’s line of sight vector with the World Geodetic System 1984 ellipsoid and with the Earth’s geoid and terrain to produce non-terrain corrected and terrain corrected geolocations. Terrain correction adjusts the geolocation for the parallax effect therefore generates more accurate latitudes and longitudes for off-nadir pixels over elevated surfaces. VIIRS I-bands and M-bands are well co-registered band to band by applying on-board time delays, with 2 × 2 I-band pixels nested to one M-band pixel [
10]. The VIIRS geolocation algorithm first geolocates I-band pixels and then M-band geolocation is created by averaging the I-band geolocation data, except for the near nadir pixels for which full geolocation is calculated.
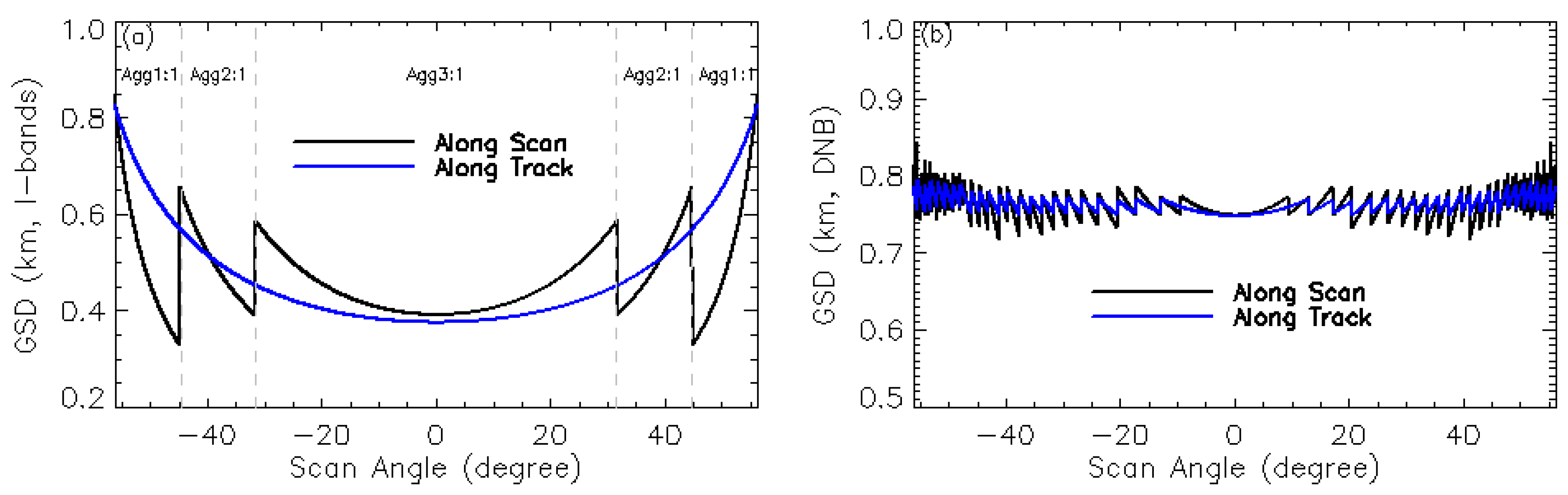
VIIRS uses along scan sample aggregation to limit pixel growth from nadir to end of scan [
10]. Both I-bands and M-bands have three aggregation zones along scan at either side of nadir. At scan angles from 0° to 31.6° (near nadir), 3 samples (sub-pixels) are aggregated to 1 pixel (agg3:1); at scan angles from 31.6° to 44.7°, 2 samples are aggregated to 1 pixel (agg2:1), and at scan angles from 44.7° to 56.28°, no aggregation is performed (agg1:1) (see
Figure 1a).
The geolocation algorithm for DNB is similar to I-bands, except that DNB has a large number of aggregation zones across scan and the extensive use of time delay and integration make its geolocation more complex. S-NPP VIIRS DNB has 32 aggregation zones at either side of nadir in order to maintain a nearly constant pixel size across the entire scan (~750 m, see
Figure 1b). During nominal operation, the number of samples aggregated to form 1 pixel vary from 11 (beginning/end of scan) to 66 (nadir) in the along scan direction, and from 20 (beginning/end of scan) to 42 (nadir) in the along track direction. Both non-terrain corrected and terrain corrected geolocations reside in the same product. However, it is worth noting that the terrain corrected geolocation for DNB was not implemented in the NOAA operational processing until 22 May 2015; while terrain corrected geolocations for I-bands and M-bands are available from the beginning of the mission. In the NOAA STAR VIIRS SDR reprocessing, terrain correction will be implemented for the entire DNB data record. This DNB geolocation improvement will be assessed in
Section 5.
In order to achieve highly accurate geometric calibration, the VIIRS instrument was carefully characterized through a series of laboratory tests prior to launch to determine parameters such as focal length, focal plane assembly center, detector to center spacing, scan rate and angles, earth view offset, detector sampling rate, aggregation, telescope to instrument frame transformation matrix, spacecraft to instrument mounting matrix, and start encoder nominal values for the rotating telescope assembly (RTA) and half angle mirror (HAM). The results of these prelaunch tests were the foundation for the baseline geolocation calibration parameter look-up tables (GEO PARAM LUT) that are used by the VIIRS geolocation algorithm. Separate GEO PARAM LUTs are required for I-band, M-band, and DNB. These LUTs share the same structure, with ~60 parameters in each LUT. Majority of parameters are the same for the 3 LUTs, while other parameters are specific for I-band, M-band, or DNB, such as detector offset and aggregation scheme. After launch, some parameters in the GEO PARAM LUTs were modified as a result of post-launch geometric calibration and validation [
9]. Spacecraft to instrument mounting matrix is one of the most important parameters that needs to be updated after launch based on analysis of geolocation residual errors measured using ground truth validation.
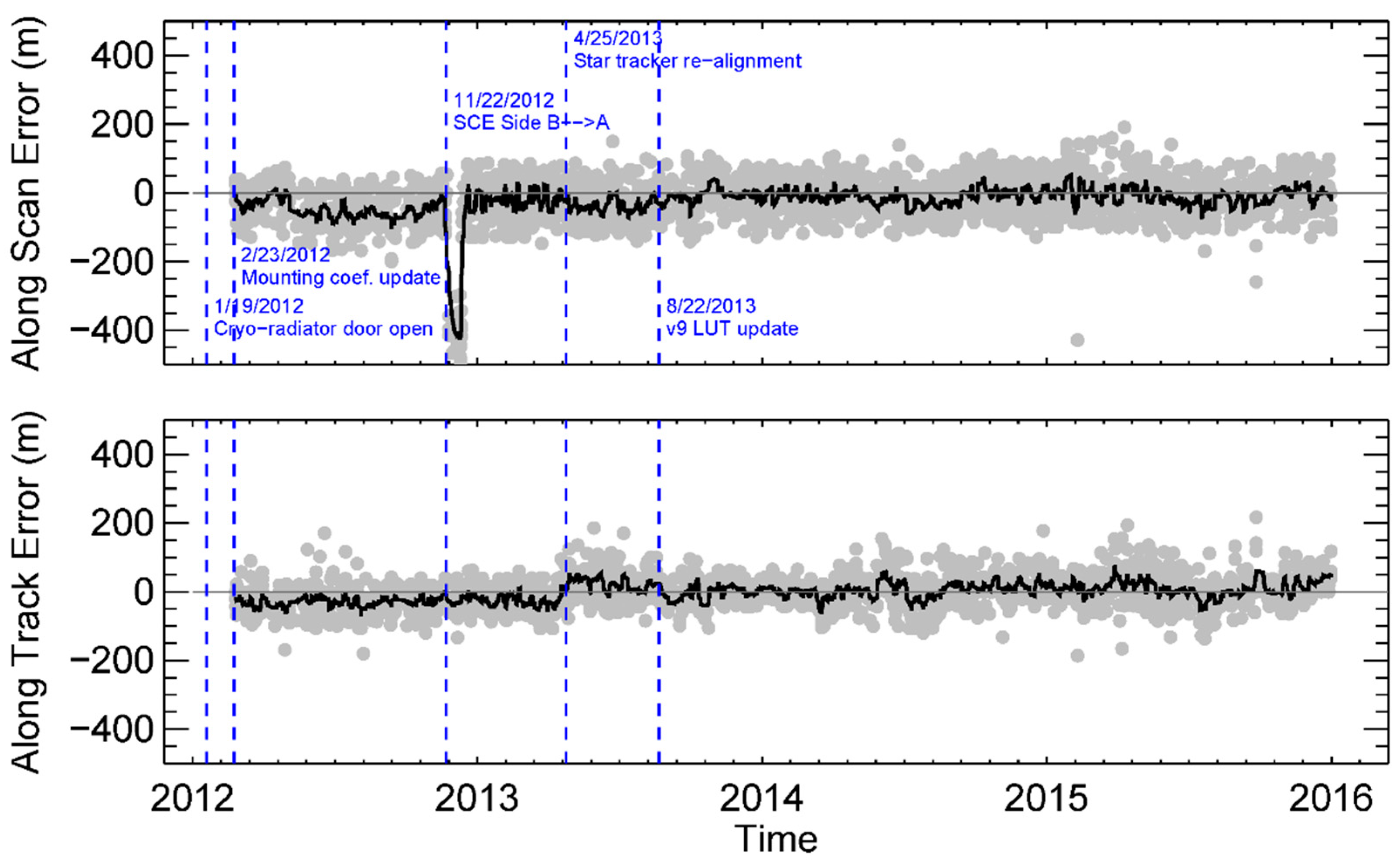
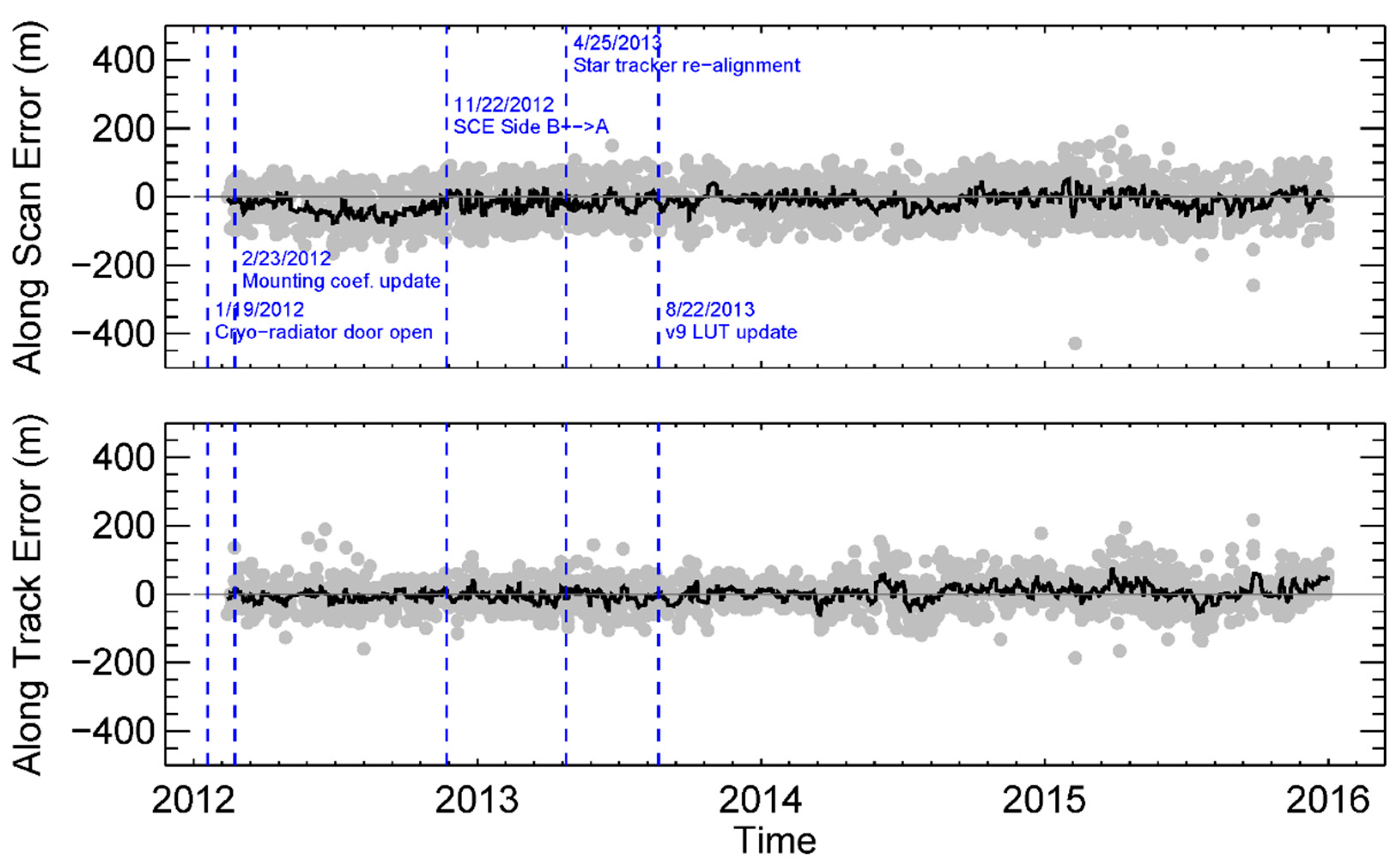
Several major S-NPP VIIRS geometric calibration parameter updates have been performed prior to August 2013 to reduce errors in the geolocation products.
Table 2 summarizes the history of GEO PARAM LUT updates [
9,
11]. An initial instrument to spacecraft mounting matrix update (version 2) was implemented on 23 February 2012 and reduced I-band geolocation error from ~1 km down to ~24 m. However, large errors (~3 km) were observed in DNB geolocation after this update (version 3). As a result, DNB focal plan assembly center was adjusted to remove the 3 km errors in the DNB geolocation. On 11 November 2012, scan control electronics (SCE) side was switched from Side B (primary side) to Side A in an effort to reduce the numbers of RTA/HAM synchronization losses. Therefore, I-band, M-band, and DNB geolocation LUTs were updated to incorporate telemetry polynomial coefficients for both SCE Side A and Side B (version 6). Later, SCE A-side data was further analyzed to optimize correction to remove scan angle dependent biases (versions 7 and 8). Star tracker re-alignment occurred on 25 April 2013 and the event caused a bias of ~25 m in the along track direction. Instrument to spacecraft mounting matrix was adjusted again to address this issue and the final GEO PARAM LUT update for S-NPP VIIRS happened on 22 August 2013 (version 9).
Since the final GEO PARAM LUT update on 22 August 2013, the NOAA operational VIIRS geolocation products have been performing well according to long-term geolocation error trending [
9,
12]. The accuracy for I-bands and M-bands terrain corrected geolocation is 1 ± 62 m (along-scan) and 3 ± 76 m (along-track) [
11]. The DNB geolocation also performs well over sea surfaces, with accuracy of 7 ± 8 m (along-scan) and −29 ± 57 m (along-track) over coastal areas [
13]. However, any error in the SDR geolocation data before the final LUT update remains and needs to be removed. The ongoing NOAA STAR VIIRS SDR reprocessing will remove geolocation errors by implementing the optimal versions of GEO LUTs and terrain correction for DNB from the beginning of the mission to present. Specifically, version 8 and version 9 GEO PARAM LUTs will be used in the reprocessing for before and after 2013-04-25 15:20 UTC, respectively. Major improvements will be presented in
Section 4 and
Section 5.
3. VIIRS Geolocation Error Monitoring at NOAA
The NOAA operational VIIRS I-bands and DNB geolocation products are monitored online in NRT. I-bands geolocation errors are monitored using the control point matching (CPM) program developed by the National Aeronautics and Space Administration (NASA) VIIRS Characterization Support Team (VCST). Since I-bands and M-bands are well co-registered, results for I-band geolocation can be applied to M-bands. DNB geolocation errors at nighttime are monitored using point sources. In this study, these two methods were also used for assessing major improvements to the NOAA STAR reprocessed geolocation dataset.
The NASA CPM program was originally developed for the Moderate Resolution Imaging Spectroradiometer (MODIS) geolocation validation and has been adopted for VIIRS I-bands geolocation error estimation and GEO PARAM LUT updates [
9,
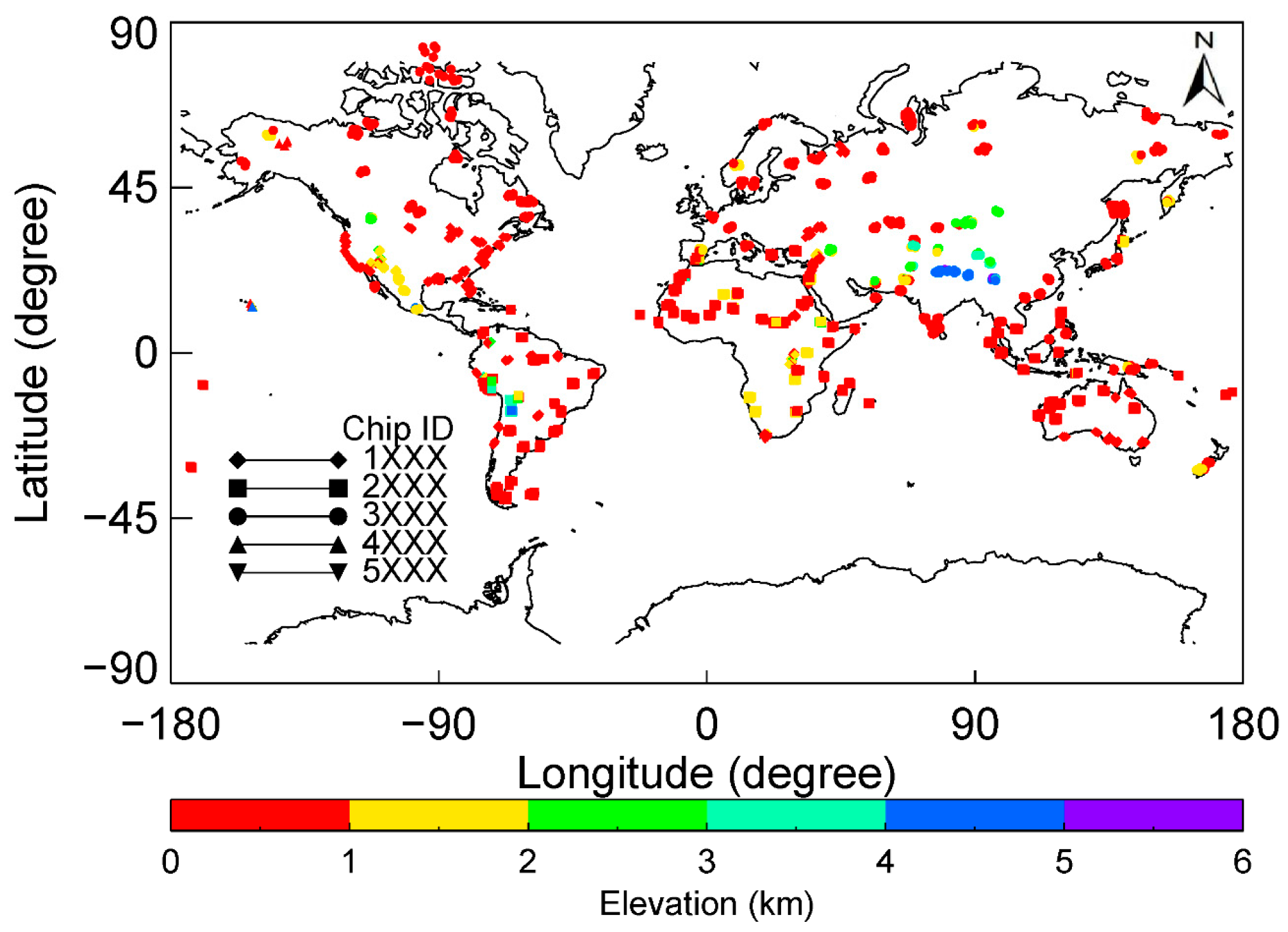
14]. The CPM program for VIIRS computes geolocation errors by cross correlation of VIIRS daytime band I1 radiance (0.639 µm) and I-bands terrain corrected geolocation product (GITCO) with unique ground features found in Landsat red band data. Specifically, correlations between VIIRS band I1 and spatially degraded Landsat chips are calculated over a regular grid of locations centered on the line of sight initially calculated by assuming perfect VIIRS geolocation. “True” VIIRS geolocation is defined as the grid point where maximum correlation occurs. There are more than 1200 globally distributed Landsat red band ground control point (GCP) chips (800 × 800 pixels, 30 m spatial resolution) that define the location of the unique ground features in the control point chip library (see
Figure 2). The outputs of the CPM program include ground truth and observed GCP latitude, longitude, height, spacecraft position, attitude, line and frame numbers, as well as observation time, and aggregation zone.
The NASA CPM program was successfully transitioned to NOAA STAR in April 2016. STAR further extended the CPM tool for NRT online geolocation error monitoring since January 2016 (
http://ncc.nesdis.noaa.gov/VIIRS/VIIRSGeoErrors.php). Nadir equivalent geolocation errors are calculated by converting CPM generated geolocation residuals in fraction frames and lines to distance errors in the along scan and along track directions using models of VIIRS horizontal and vertical sampling distances.
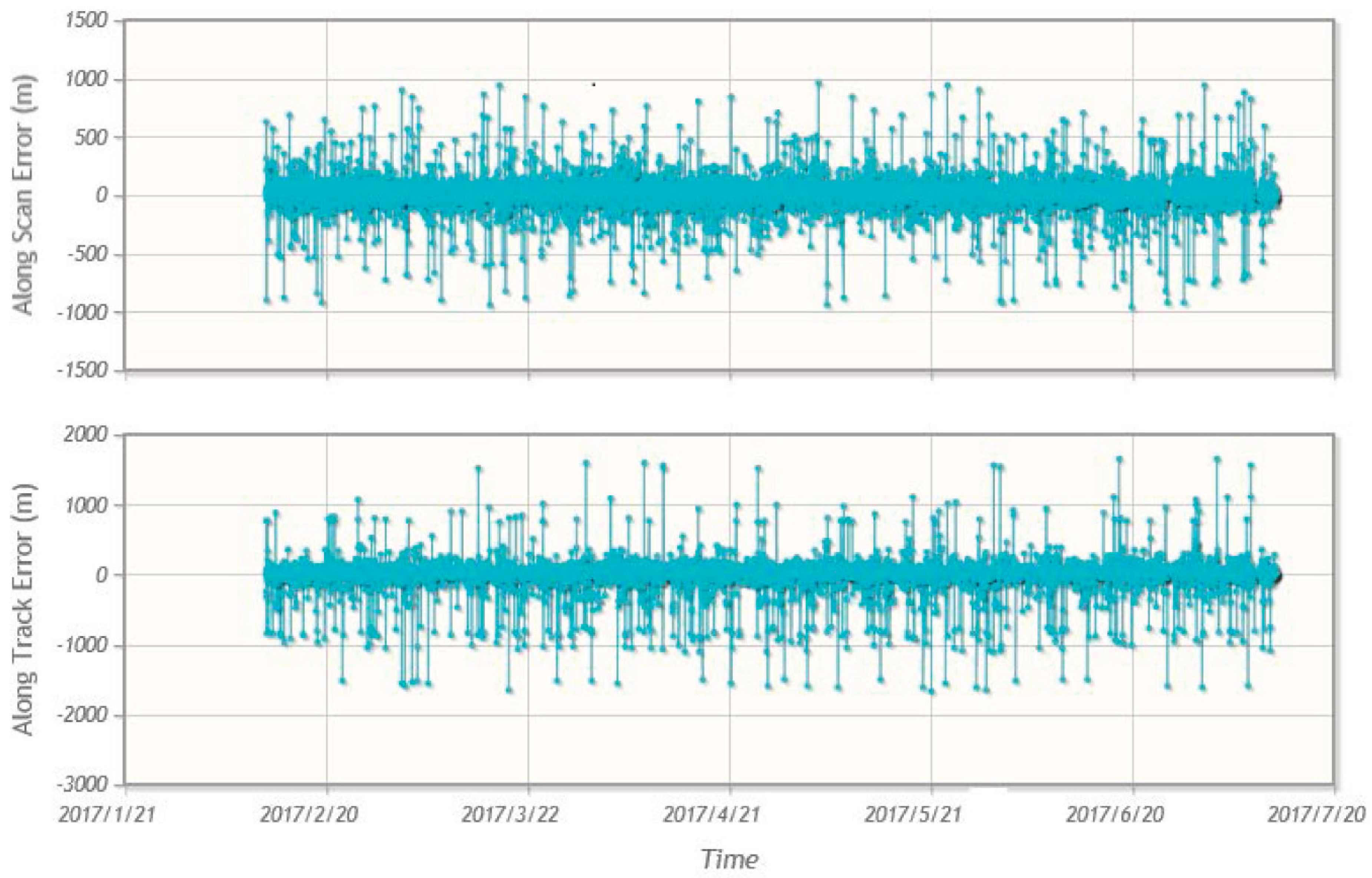
Figure 3 shows the I-bands geolocation error time series from January, 2017 to present. The accuracy of I-bands geolocation is 16.9 ± 102.3 m (mean bias and standard deviation) in the along scan direction and 19.8 ± 75.2 m in the along track direction; this is generally consistent with the results reported in earlier studies [
9,
15]. In the along scan direction, geolocation errors increase with scan angles, with mean biases and standard deviations of ~4.0 ± 110.0 m, 25.0 ± 118.0 m , and 45.0 ± 140.0 m for aggregation zones agg3:1, agg2:1, and agg1:1, respectively. In the along track direction, mean biases are nearly constant across the scan (~20.0 m); only standard deviations increase with scan angles, ~80.0, 100.0, and 120.0 m for aggregation zones agg3:1, agg2:1, and agg1:1, respectively. The small differences between geolocation errors reported here and those by previous studies are mainly due to differences in study period and quality controls between the NOAA and NASA monitoring tools, such as threshold of correlation and CPM chips used [
16]. In addition, larger uncertainty may exist for geolocation errors at zone agg1:1, which has significantly less CPM data available compared to the other two zones because of a code error in the CPM tool. This issue will be further studied in the future.
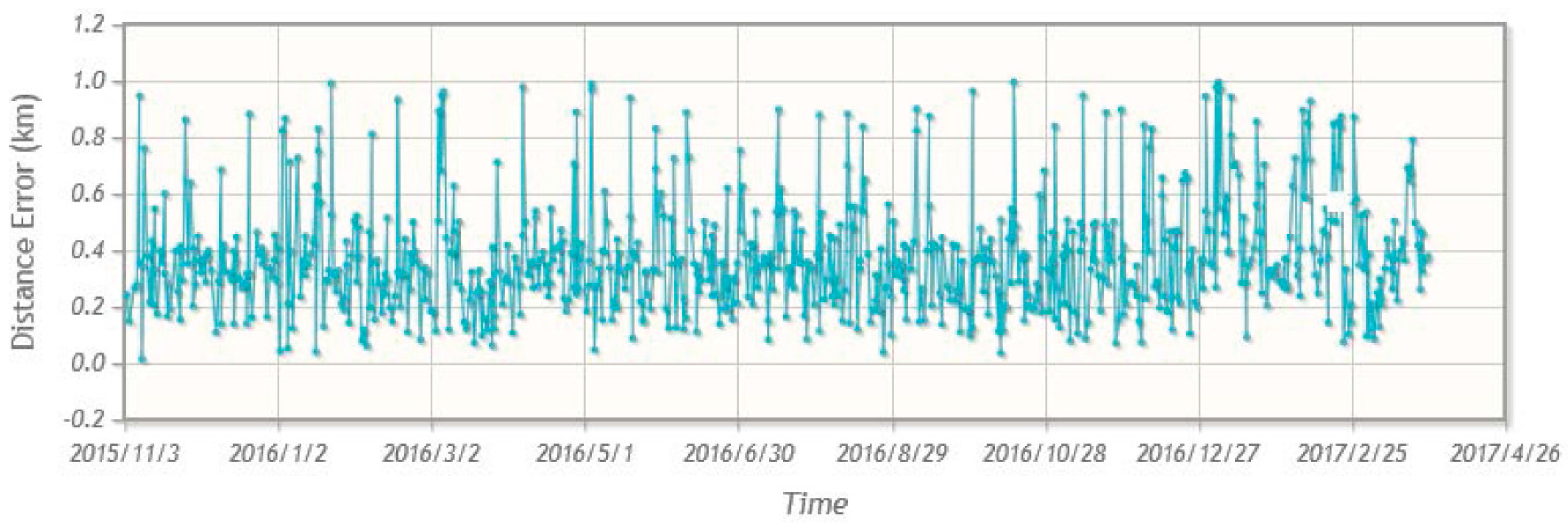
The NOAA operational VIIRS DNB geolocation at nighttime is monitored using point sources such as lights from oil platforms, power plants, gas flares, volcanoes, and bridges.
Figure 4 shows an example of DNB nighttime geolocation error time series using DNB observations over the Oil Platform Holly point source from November 2015 to April 2017 (at sea level,
http://ncc.nesdis.noaa.gov/VIIRS/VIIRSGeoErrors.php). Details about this site will be given in
Section 5.1. DNB geolocation errors are calculated as distances between ground truth and observed latitudes and longitudes. Unlike the I-bands geolocation errors, DNB geolocation errors at different scan angles are not require to be adjusted to near-equivalent values due to the fact that S-NPP VIIRS DNB has near constant ground sample distance across the entire scan (see
Figure 1b). Observed geolocations are centered on the oil platform, with mean bias about 0.5 pixel (0.375 km) and standard deviation about 0.2 km. Larger distance errors found in some cases may be caused by cloud contamination due to the difficulty of cloud detection at night. No significant scan angle dependency of DNB geolocation errors was observed, may due to the limitation of the nighttime point source based method used in this study.
5. Evaluating DNB Geolocation Product Reprocessing Improvements
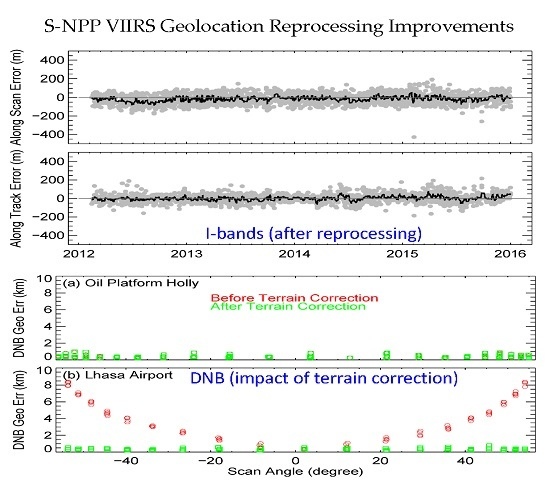
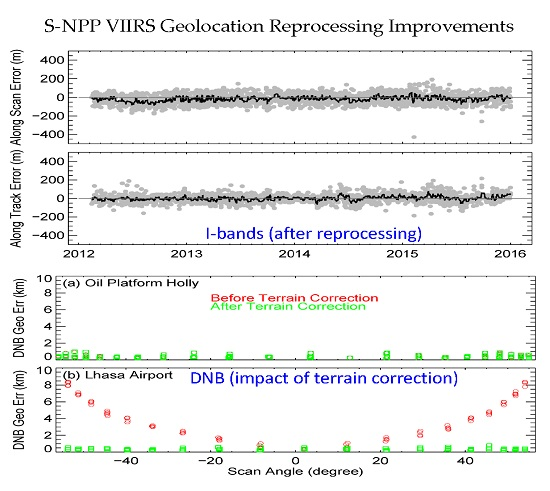
Two major calibration improvements are expected in the reprocessed DNB geolocation product: (1) improvement due to DNB GEO PARAM LUT updates; (2) improvement due to the implementation of terrain correction for DNB. The DNB geolocation improvements due to GEO PARAM LUT updates are similar to those for I-bands, and will not be presented in this paper. Terrain correction was implemented from the beginning of the S-NPP mission for I-bands and M-band, however, it was not available for DNB until 22 May 2015. Terrain correction has no impacts over surfaces at sea level or at nadir; it improves geolocation accuracy at higher elevation surfaces and at larger scan angles. In this study, the improvement due to the terrain correction was quantified by comparing nighttime geolocation error over two point sources, one at sea level and the other one at high altitude.
5.1. Point Source Sites
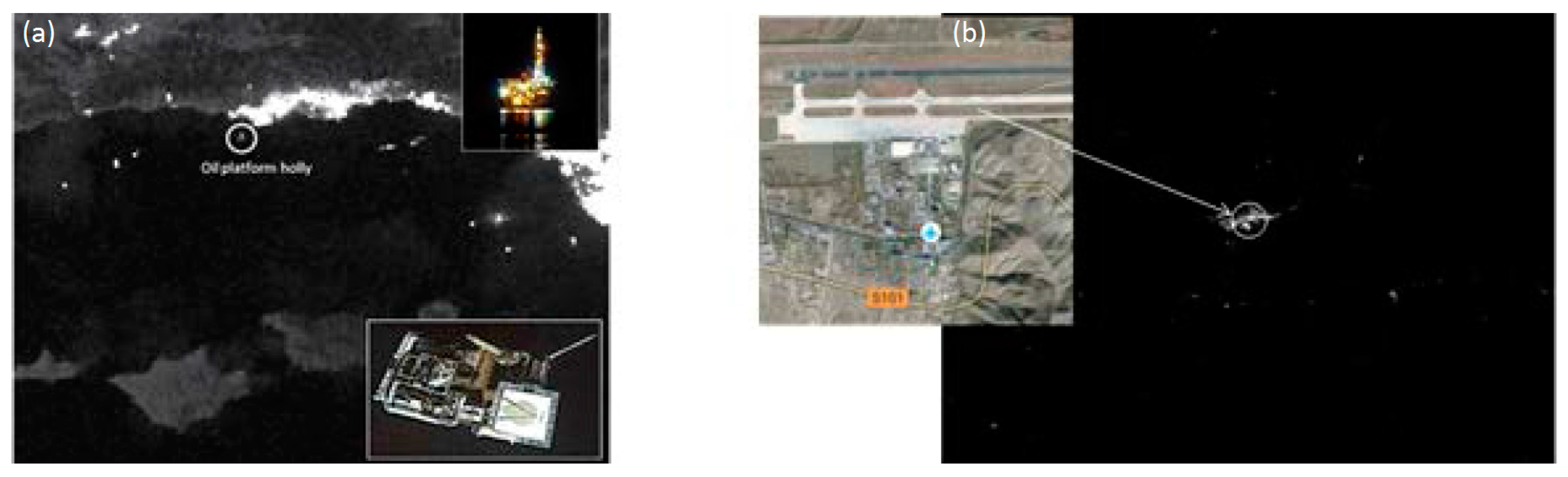
Two nighttime point sources were used to assess the DNB geolocation reprocessing improvement due to the implementation of terrain correction. The first point source is the Oil Platform Holly (latitude: 34.3898°N; longitude: 119.9065°W, at sea level, see
Figure 8a), located near Los Angeles, CA. It is about 50 m long and 29 m wide over water. The lights appear to be always on at night and are relatively stable as a point source for DNB geolocation analysis. Although oil platforms have lights on overnight, their long-term stability is not well known. For example, some lights on the platform may be turned on and off at a given schedule. This may increase the uncertainties (to some extent) for geolocation validation. The second point source used by this study is the Lhasa Airport, Tibet, China (latitude: 29.2932°N; longitude 90.9006°E; elevation 3570 m above sea level, see
Figure 8b). Differences between non-terrain corrected and terrin corrected geolocations over this high elevation site can be used to assess the DNB geolocation reprocessing improvement due to the implementation of terrain correction proir to 22 May 2015.
5.2. DNB Geolocation Improvement
Three months of NOAA operational DNB geolocation products (November 2015 to January 2016) over the two point sources were used to estimate improvements due to the implementing terrain correction to DNB geolocation. The data were obtained from NOAA STAR Central Data Repository, a short-term (4 months revolving) mirror site of the NOAA CLASS for S-NPP data. Geolocation errors were calculated as distances between the VIIRS observed and ground truth latitudes and longitudes for terrain corrected and non-terrain corrected geolocations over both sites.
Figure 9 compares geolocation errors over the Oil Platform Holly and Lhasa Airport sites. At sea level, DNB geolocation errors for the non-terrain corrected and terrain corrected geolocation products are very close to each other, with averaged geolocation error of ~0.5 pixel and standard deviation ~0.2 km. Moreover, geolocation errors are independent of scan angles, consistent with the fact that terrain correction only affects off-nadir observations with high elevations. Over the Lhasa Airport site, it can be observed that lack of terrain correction can introduce errors as large as ~9 km at high scan angles. After terrain correction, averaged geolocation error is reduced to ~0.5 pixel, comparable to the geolocation error over the Holly site. In addition, geolocation errors over the Lhasa Airport site become independent of scan angles after terrain correction.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}