A New Method for Acquisition of High-Resolution Seabed Topography by Matching Seabed Classification Images


Abstract
:
1. Introduction
2. MBES and SSS Images
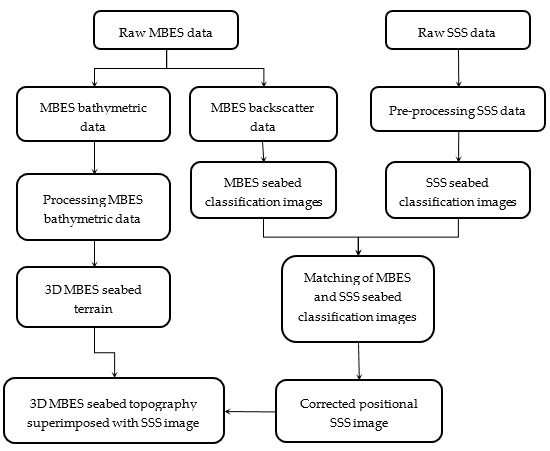
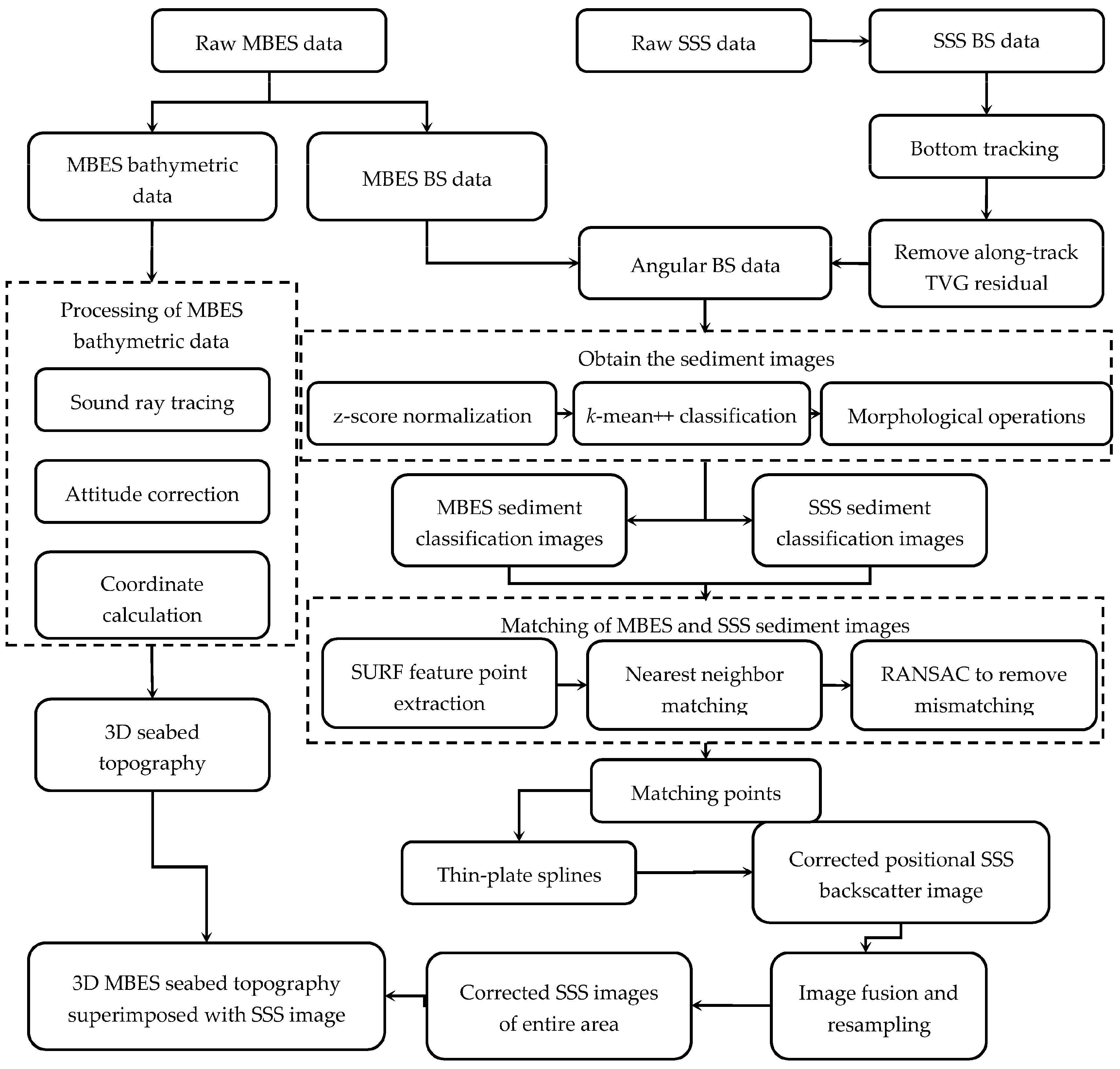
3. Superposition of SSS Images and MBES Terrain
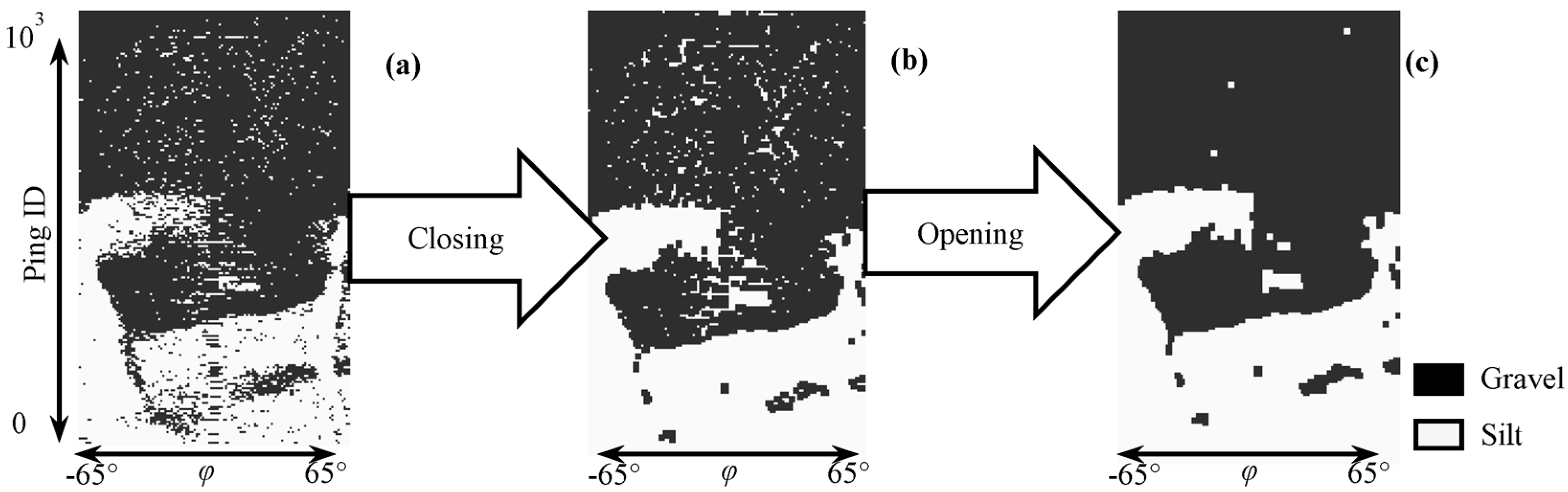
3.1. Acquisitions of Sediment Images
3.2. Segmental Matching Based on Sediment Distributions and Features
- (1)
- Geocode the MBES sediment image of a survey line according to instantaneous locations of MBES transducer.
- (2)
- Geocode the SSS sediment image in the same water region as the MBES sediment image according to the instantaneous estimation locations of SSS towfish.
- (3)
- Select a segment of SSS sediment image with m × n along the survey line, and determine the co-located and slightly larger than m × n MBES image segment from the MBES sediment image when considering the positional error. The segment principle is discussed in Section 5.4.
- (4)
- Extract the common feature point pairs and match the two image segments by the SURF algorithm [28]. A detailed process includes the following steps:
- (a)
- Detect the feature points from the MBES image segment and the corresponding SSS one using SURF.
- (b)
- Describe each feature point with a multidimensional vector.
- (c)
- Match the feature points according to the nearest vector distance of different feature points.
- (d)
- Use random sample consensus (RANSAC) algorithm to check the consistencies of the angles and distances of the matching vector pairs to eliminate mismatching.
- (5)
- Repeat steps 3–4 until the matchings in all segments are carried out.
- (1)
- Select a random subset of the matching point pairs and named it as the hypothetical inliers.
- (2)
- Calculate the relative geo-distance distribution model, namely the mean and twice the standard deviation of the relative positional deviation from the set of hypothetical inliers. If the absolute value of the relative geo-distance distribution model is more than the given geo-distance parameter as mentioned the above, the hypothetical inliers will be given up and go back to step 1; otherwise, continue to step 3.
- (3)
- All other matching point pairs are tested against the relative geo-distance distribution model. The points that fit the estimated model well are considered as part of the consensus set.
- (4)
- The model is reasonable if sufficient matching pairs have been classified as part of the consensus set. In addition, the model may be improved by re-estimating it using all members of the set.
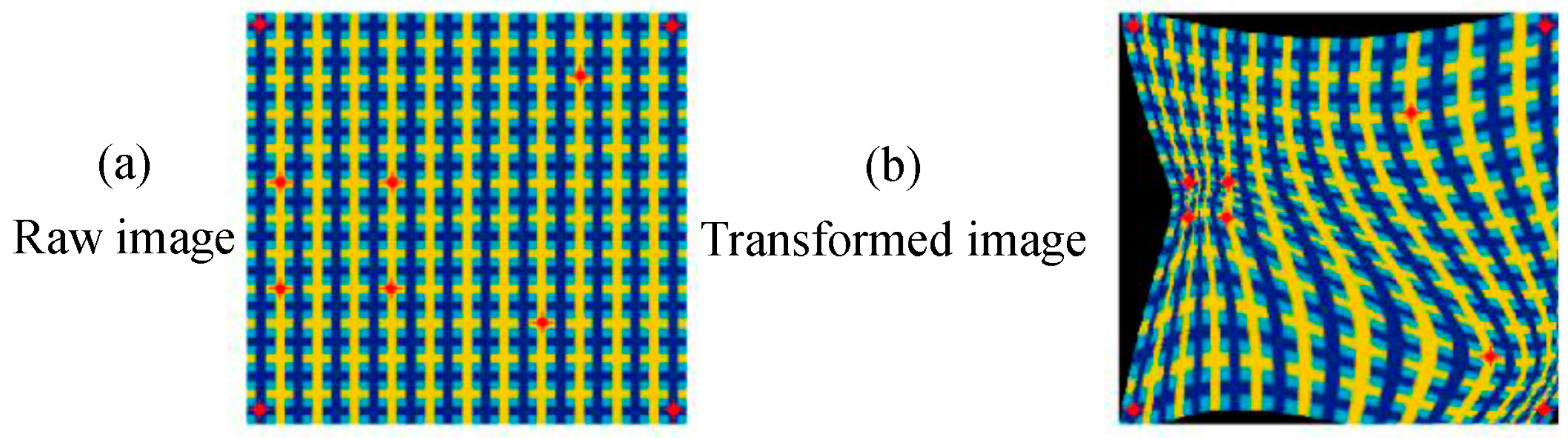
3.3. Position Correction of SSS Images Using Thin-Plate Splines
3.4. Superimposition of SSS Images and MBES Terrain
4. Experiment and Analysis
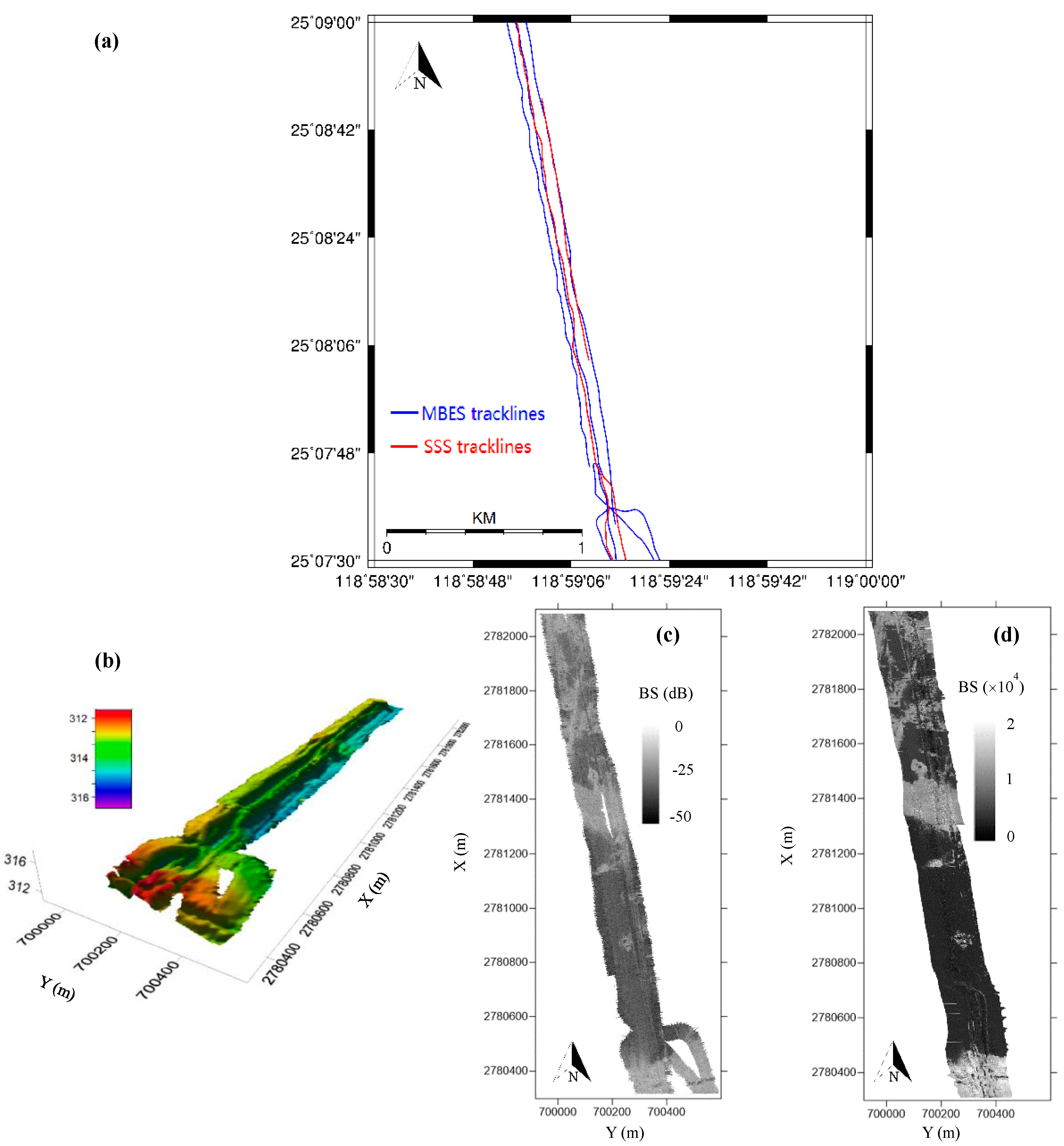
4.1. Data Acquisition
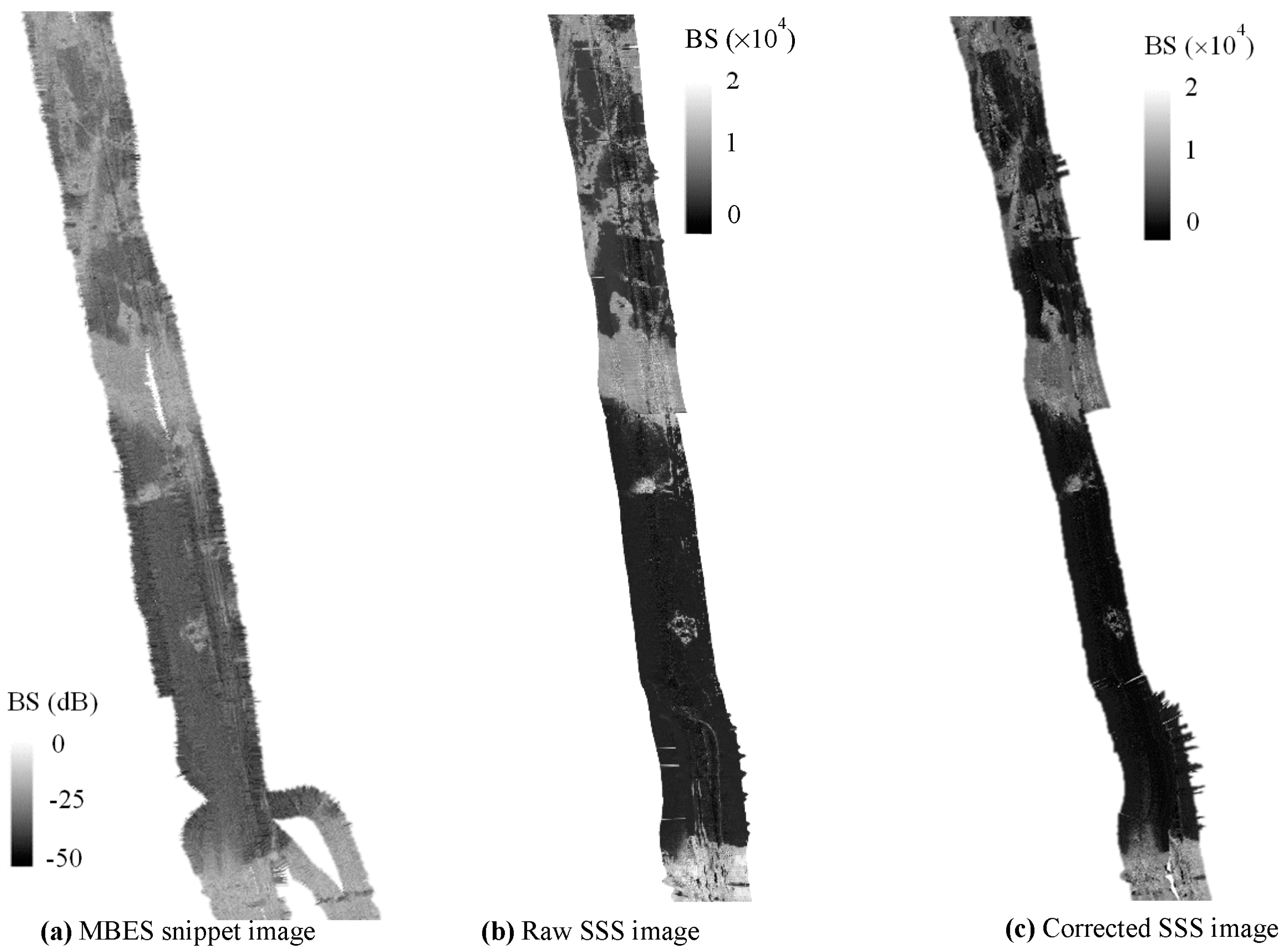
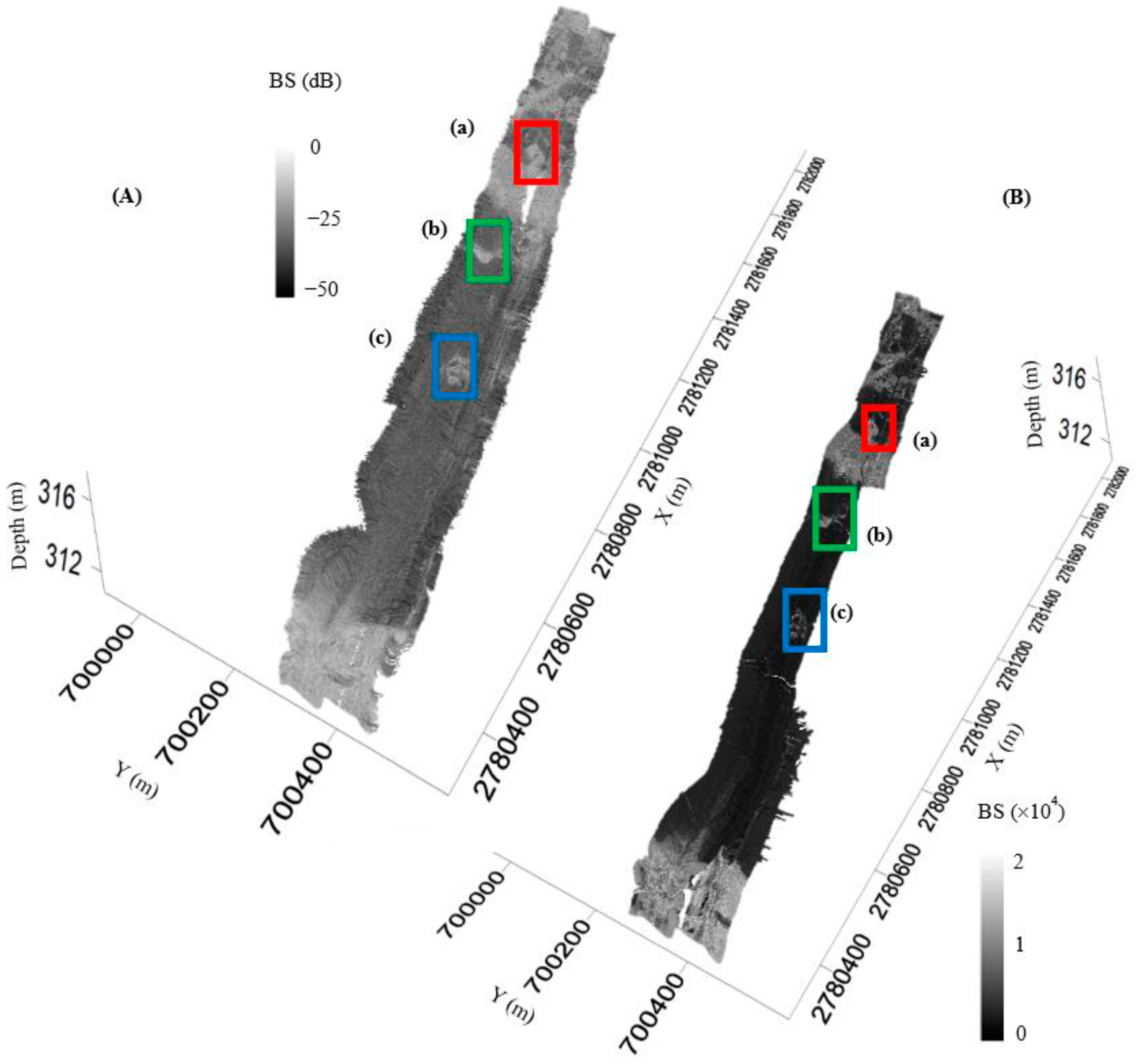
4.2. Superimposition of SSS Image and MBES Terrain
- (1)
- (2)
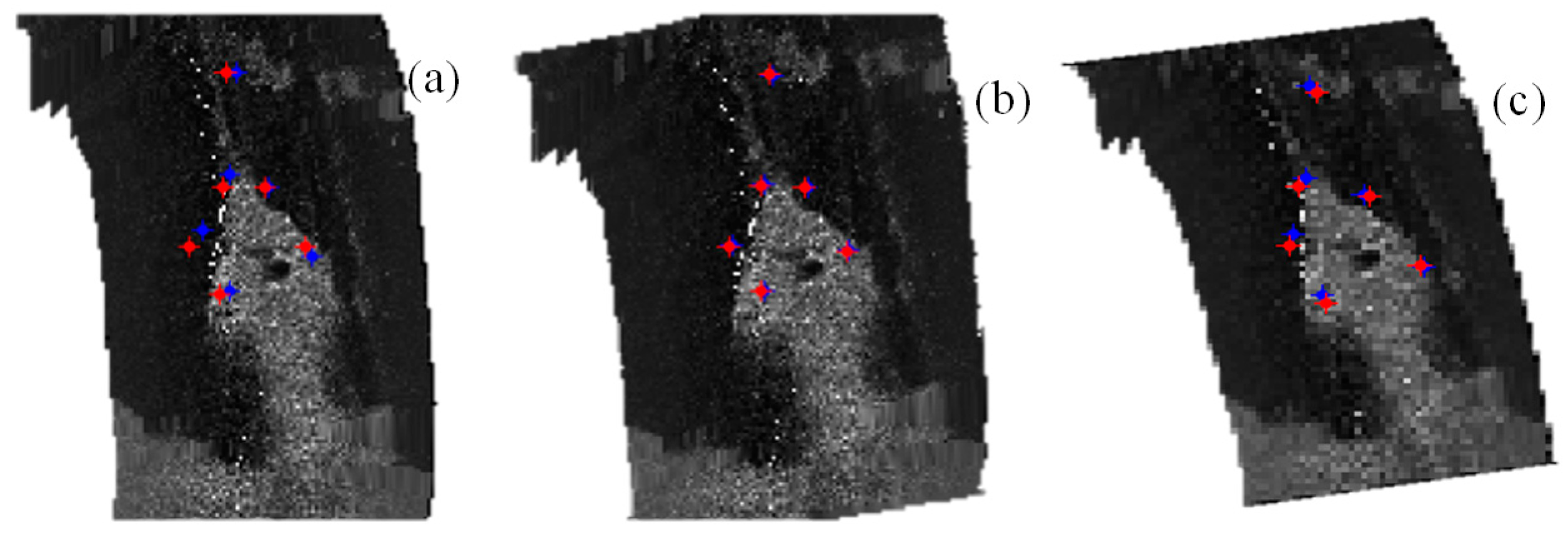
- Good consistence between the SSS images and MBES terrains is achieved at the three targets at different positions of the measurement area, and verifying that the segmental matching in consideration of time-varying positional accuracy of SSS towfish is appropriate.
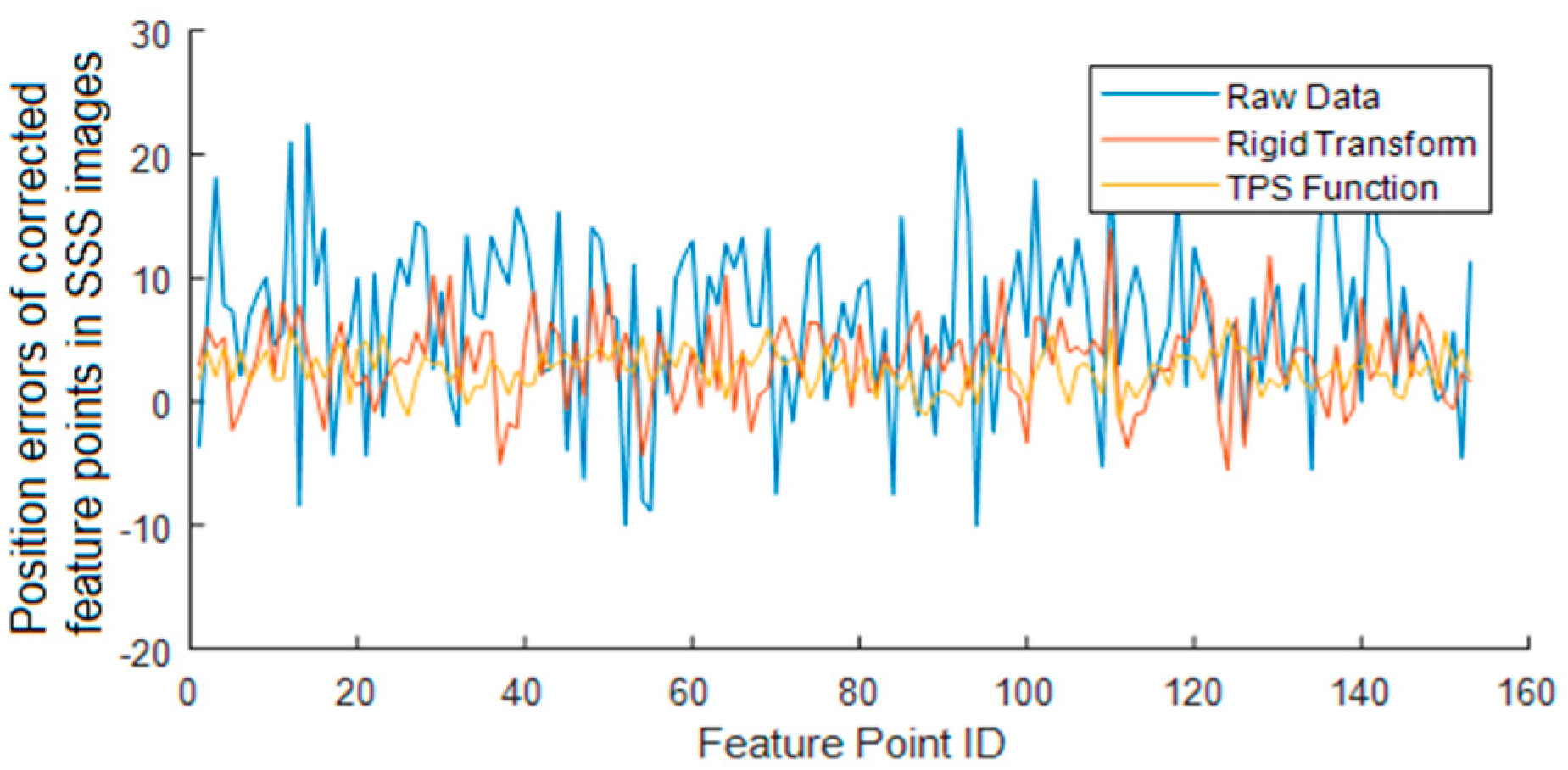
4.3. Matching Accuracy
5. Discussion
5.1. Necessity to Superimpose SSS Image on MBES Terrain
5.2. Possible Features Used in the Matching
- (1)
- Seabed terrain: Both MBES and SSS images are 2D images. Topographic variations may not be reflected in the 2D images. Thus, seabed terrain cannot be used as a feature in the matching.
- (2)
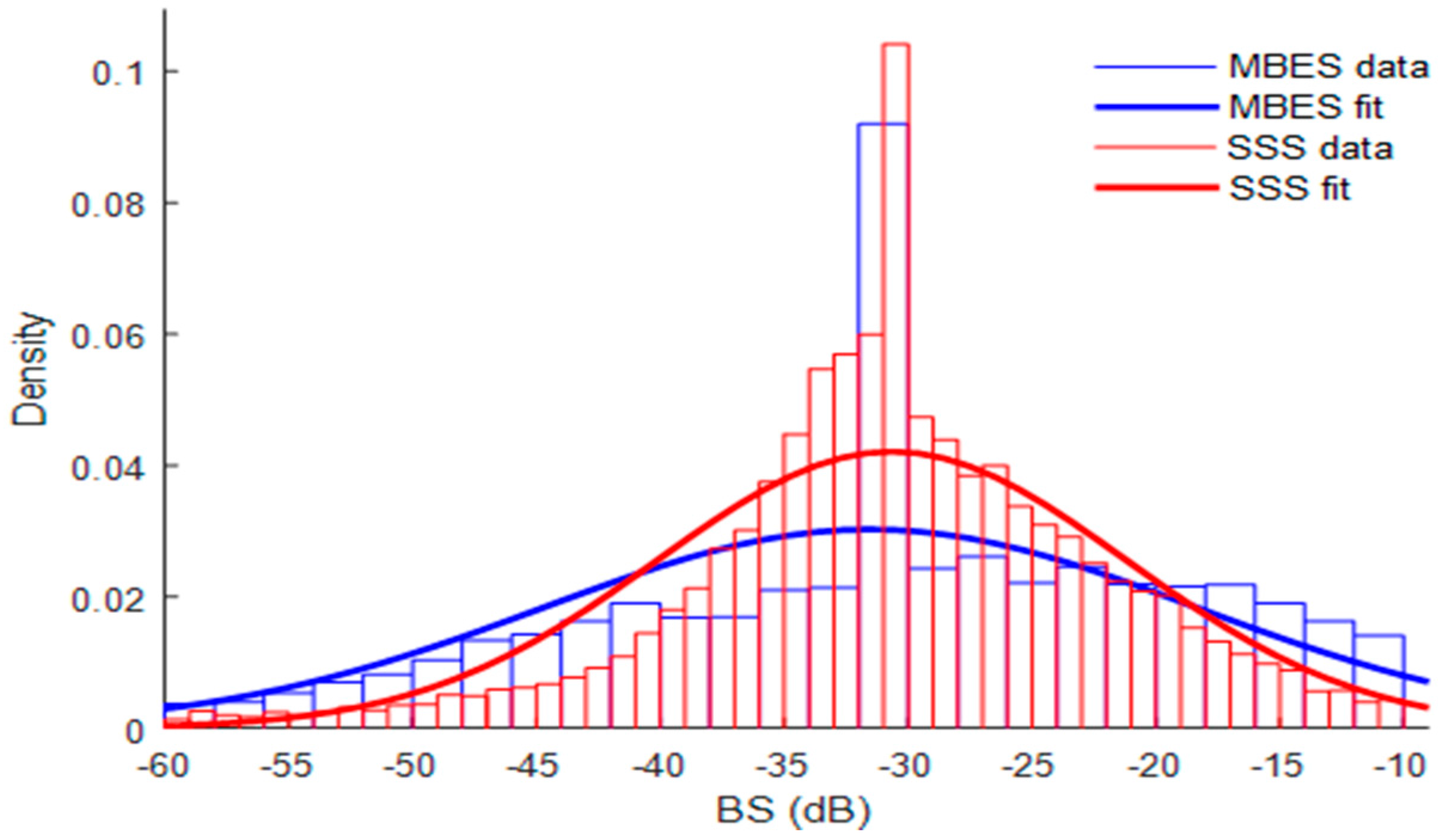
- Seabed sediment variation: Although MBES and SSS images have significant differences in the initial emission energy level, acoustic frequency, and bean pattern, both MBES and SSS images can reflect the variations and distributions of common seabed sediments. These studies proved that seabed sediments can be classified using MBES and SSS BS data [20,35]. Therefore, the sediment variations in MBES and SSS images can be used as common features in the matching of the two types of images.
- (3)
- Seabed targets: Based on the imaging mechanisms of SSS and MBES, large seabed targets should appear in both of the sonar images in theory. However, considering that SSS images have higher resolution and SNR than MBES images, some small seabed targets can be displayed in SSS images, but not in MBES images. According to the principle of sediment classification, the same targets that appear in the two sonar images can also be displayed in their sediment images and used as common features in the matching.
- (4)
5.3. Influencing Factors on the Matching
5.4. Size of Matching Segment
- (1)
- At least five feature point pairs should be included in the segmental images to guarantee calculation accuracy of transformation.
- (2)
- Setting small size matching segment is necessary to weaken the effect of time-varying errors.
5.5. Applications
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Blondel, P. Automatic mine detection by textural analysis of cots sidescan sonar imagery. Int. J. Remote Sens. 2000, 21, 3115–3128. [Google Scholar] [CrossRef]
- Hughes Clarke, J.; Mayer, L.; Wells, D. Shallow-water imaging multibeam sonars: A new tool for investigating seafloor processes in the coastal zone and on the continental shelf. Mar. Geophys. Res. 1996, 18, 607–629. [Google Scholar] [CrossRef]
- Fakiris, E.; Papatheodorou, G.; Geraga, M.; Ferentinos, G. An automatic target detection algorithm for swath sonar backscatter imagery, using image texture and independent component analysis. Remote Sens. 2016, 8, 373. [Google Scholar] [CrossRef]
- Degraer, S.; Moerkerke, G.; Rabaut, M.; Van Hoey, G.; Du Four, I.; Vincx, M.; Henriet, J.-P.; Van Lancker, V. Very-high resolution side-scan sonar mapping of biogenic reefs of the tube-worm lanice conchilega. Remote Sens. Environ. 2008, 112, 3323–3328. [Google Scholar] [CrossRef]
- Collier, J.S.; Humber, S.R. Time-lapse side-scan sonar imaging of bleached coral reefs: A case study from the seychelles. Remote Sens. Environ. 2007, 108, 339–356. [Google Scholar] [CrossRef]
- Fanlin, Y.; Ziyin, W.; Zhixing, D.; Xianglong, J. Co-registering and fusion of digital information of multi-beam sonar and side-scan sonar. Geomat. Inf. Sci. Wuhan Univ. 2006, 31, 740–743. [Google Scholar]
- Costa, B.M.; Battista, T.A.; Pittman, S.J. Comparative evaluation of airborne lidar and ship-based multibeam sonar bathymetry and intensity for mapping coral reef ecosystems. Remote Sens. Environ. 2009, 113, 1082–1100. [Google Scholar] [CrossRef]
- Brisson, L.; Hiller, T. Multiphase echosounder to improve shallow-water surveys. Sea Technol. 2015, 56, 10–14. [Google Scholar]
- Zhao, J.; Wang, A.; Guo, J. Study on fusion method of the block image of MBS and SSS. Geomat. Inf. Sci. Wuhan Univ. 2013, 287–290. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E. Applications of multibeam water column imaging for hydrographic survey. Hydrogr. J. 2006, 120, 3. [Google Scholar]
- Le Bas, T.; Huvenne, V. Acquisition and processing of backscatter data for habitat mapping—Comparison of multibeam and sidescan systems. Appl. Acoust. 2009, 70, 1248–1257. [Google Scholar] [CrossRef]
- Johannsson, H.; Kaess, M.; Englot, B.; Hover, F.; Leonard, J. Imaging sonar-aided navigation for autonomous underwater harbor surveillance. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4396–4403. [Google Scholar]
- Thorpe, C. Sonar image processing: An application of template matching through relaxation. In Proceedings of the the 1981 2nd International Symposium on Unmanned Untethered Submersible Technology, Boston, MA, USA, 9 October 1981; pp. 35–52. [Google Scholar]
- Yong, E.W. Investigation of Mosaicing Techniques for Forward Looking Sonar. Master’s Thesis, Heriot-Watt University, Edinburgh, Scotland, UK, 2011. [Google Scholar]
- Hurtós, N.; Ribas, D.; Cufí, X.; Petillot, Y.; Salvi, J. Fourier-based registration for robust forward-looking sonar mosaicing in low-visibility underwater environments. J. Field Robot. 2015, 32, 123–151. [Google Scholar] [CrossRef]
- Aykin, M.D.; Negahdaripour, S. On feature matching and image registration for two-dimensional forward-scan sonar imaging. J. Field Robot. 2013, 30, 602–623. [Google Scholar] [CrossRef]
- SiljestrÖM, P.; Moreno, A.; Rey, J. Technical note seafloor characterization through side scan sonar image processing. Int. J. Remote Sens. 1995, 16, 625–632. [Google Scholar] [CrossRef]
- Bates, C.R.; Oakley, D.J. Bathymetric sidescan investigation of sedimentary features in the tay estuary, scotland. Int. J. Remote Sens. 2004, 25, 5089–5104. [Google Scholar] [CrossRef]
- Hasan, R.; Ierodiaconou, D.; Monk, J. Evaluation of four supervised learning methods for benthic habitat mapping using backscatter from multi-beam sonar. Remote Sens. 2012, 4, 3427–3443. [Google Scholar] [CrossRef]
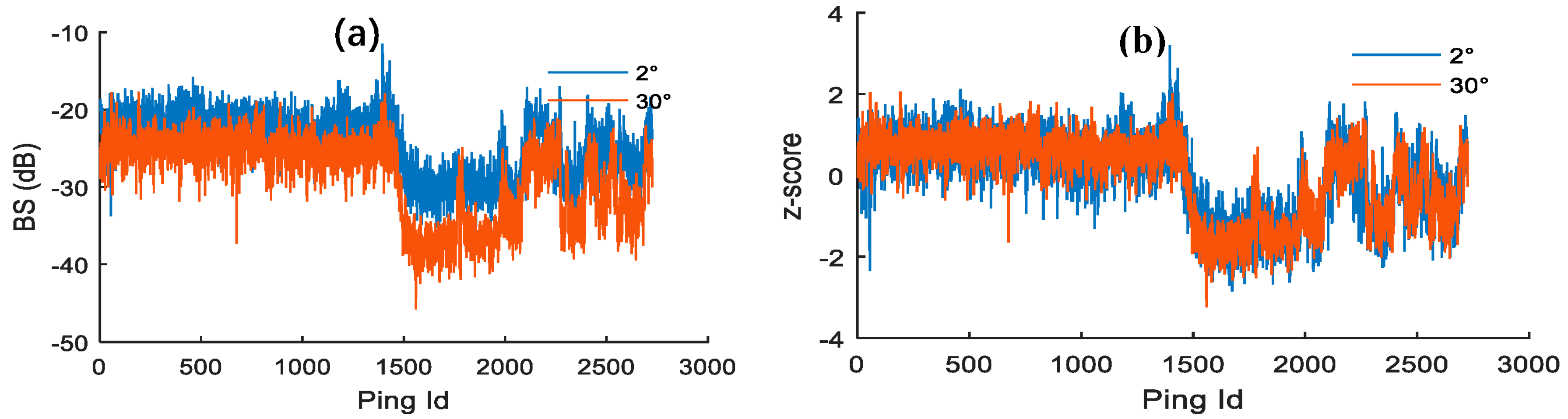
- Zhao, J.; Yan, J.; Zhang, H.; Meng, J. Two self-adaptive methods of improving multibeam backscatter image quality by removing angular response effect. J. Mar. Sci. Technol. 2017, 22, 288–300. [Google Scholar] [CrossRef]
- Zhao, J.; Yan, J.; Zhang, H.; Meng, J. A new radiometric correction method for side-scan sonar images in consideration of seabed sediment variation. Remote Sens. 2017, 9, 575. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, A.; Zhang, H.; Wang, X. Mosaic method of side-scan sonar strip images using corresponding features. IET Image Process. 2013, 7, 616–623. [Google Scholar] [CrossRef]
- Fonseca, L.; Calder, B. Clustering acoustic backscatter in the angular response space. In Proceedings of the US Hydrographic Conference, Norfolk, VA, USA, 14–18 May 2007. [Google Scholar]
- Arthur, D.; Vassilvitskii, S. K-means++: The advantages of careful seeding. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms; Society for Industrial and Applied Mathematics: New Orleans, LA, USA, 2007; pp. 1027–1035. [Google Scholar]
- Laganière, R. Opencv 2 Computer Vision Application Programming Cookbook: Over 50 Recipes to Master This Library of Programming Functions for Real-Time Computer Vision; Packt Publishing Ltd.: Birmingham, UK, 2011; p. 277. [Google Scholar]
- Capus, C.; Ruiz, I.T.; Petillot, Y. Compensation for changing beam pattern and residual tvg effects with sonar altitude variation for sidescan mosaicing and classification. In Proceedings of the 7th European Conference on Underwater Acoustics, Delft, The Netherlands, 5–8 July 2004. [Google Scholar]
- Capus, C.G.; Banks, A.C.; Coiras, E.; Ruiz, I.T.; Smith, C.J.; Petillot, Y.R. Data correction for visualisation and classification of sidescan sonar imagery. IET Radar Sonar Navig. 2008, 2, 155–169. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (surf). Comput. Vis. Image Understand. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 1152, pp. 1150–1157. [Google Scholar]
- Luo, J.; Gwun, O. A comparison of sift, pca-sift and surf. Int. J. Image Proc. 2009, 3, 143–152. [Google Scholar]
- Brook, A.; Ben-Dor, E. Automatic registration of airborne and spaceborne images by topology map matching with surf processor algorithm. Remote Sens. 2011, 3, 65–82. [Google Scholar] [CrossRef]
- Bookstein, F.L. Principal warps: Thin-plate splines and the decomposition of deformations. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 567–585. [Google Scholar] [CrossRef]
- Glasbey, C.A.; Mardia, K.V. A review of image-warping methods. J. Appl. Stat. 1998, 25, 155–171. [Google Scholar] [CrossRef]
- Yang, K.; Pan, A.; Yang, Y.; Zhang, S.; Ong, S.; Tang, H. Remote sensing image registration using multiple image features. Remote Sens. 2017, 9, 581. [Google Scholar] [CrossRef]
- Wahba, G. Spline Models for Observational Data; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1990. [Google Scholar]
- Woock, P. Deep-sea seafloor shape reconstruction from side-scan sonar data for auv navigation. In Proceedings of the OCEANS, 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–7. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Max Deviation (m) | Mean Deviation (m) | Standard Deviation (±m) | |
|---|---|---|---|
| Raw data | 23.00 | 9.11 | 11.87 |
| Rigid transformation | 15.00 | 3.33 | 3.80 |
| TPS | 6.00 | 2.50 | 0.67 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Meng, J.; Zhang, H.; Yan, J. A New Method for Acquisition of High-Resolution Seabed Topography by Matching Seabed Classification Images. Remote Sens. 2017, 9, 1214. https://doi.org/10.3390/rs9121214
Zhao J, Meng J, Zhang H, Yan J. A New Method for Acquisition of High-Resolution Seabed Topography by Matching Seabed Classification Images. Remote Sensing. 2017; 9(12):1214. https://doi.org/10.3390/rs9121214
Chicago/Turabian StyleZhao, Jianhu, Junxia Meng, Hongmei Zhang, and Jun Yan. 2017. "A New Method for Acquisition of High-Resolution Seabed Topography by Matching Seabed Classification Images" Remote Sensing 9, no. 12: 1214. https://doi.org/10.3390/rs9121214
APA StyleZhao, J., Meng, J., Zhang, H., & Yan, J. (2017). A New Method for Acquisition of High-Resolution Seabed Topography by Matching Seabed Classification Images. Remote Sensing, 9(12), 1214. https://doi.org/10.3390/rs9121214