
Design and Application of MEMS-Based Hall Sensor Array for Magnetic Field Mapping


Abstract
:1. Introduction
2. Principle and Design
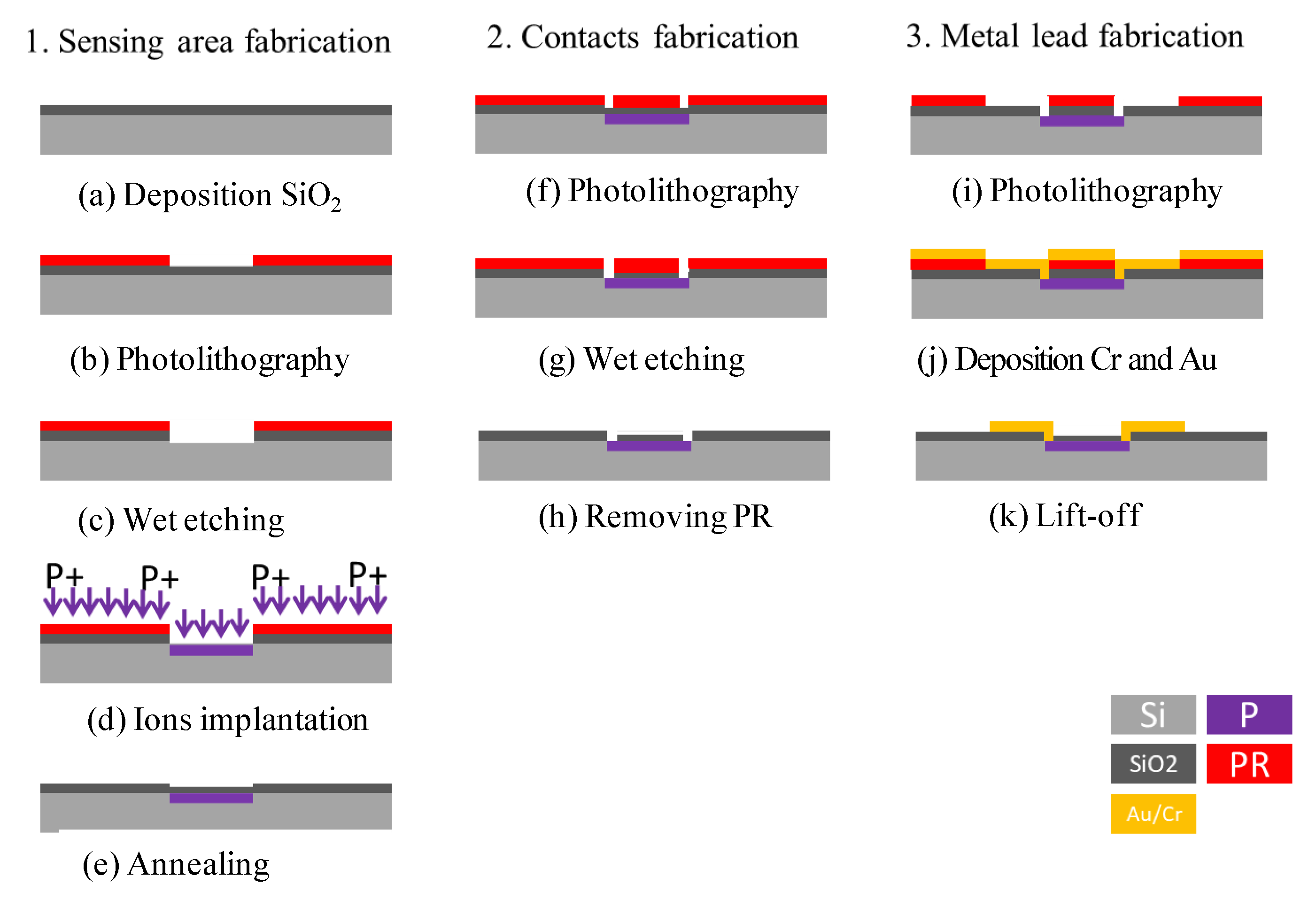
3. Fabrication
4. Results and Discussion
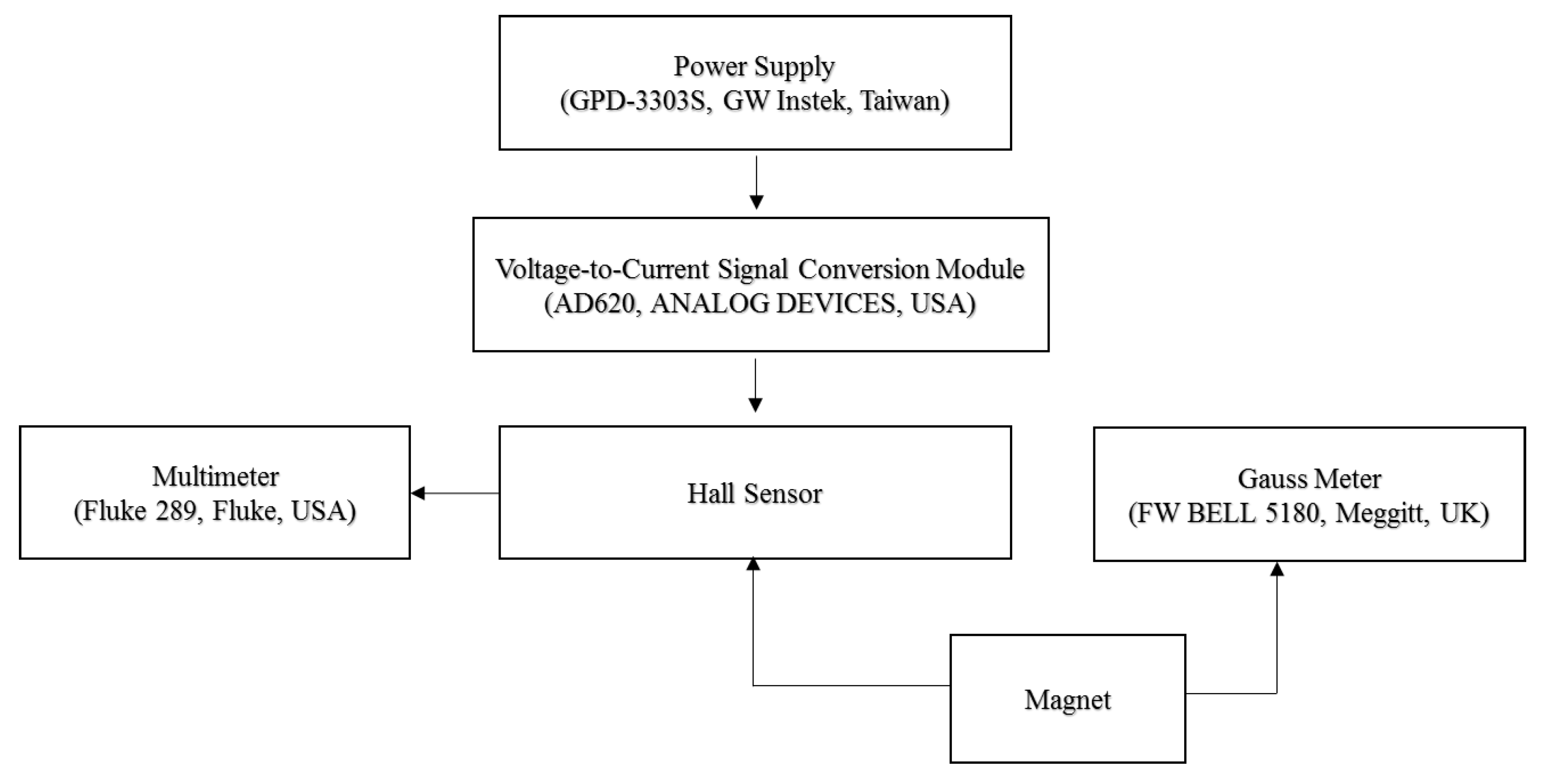
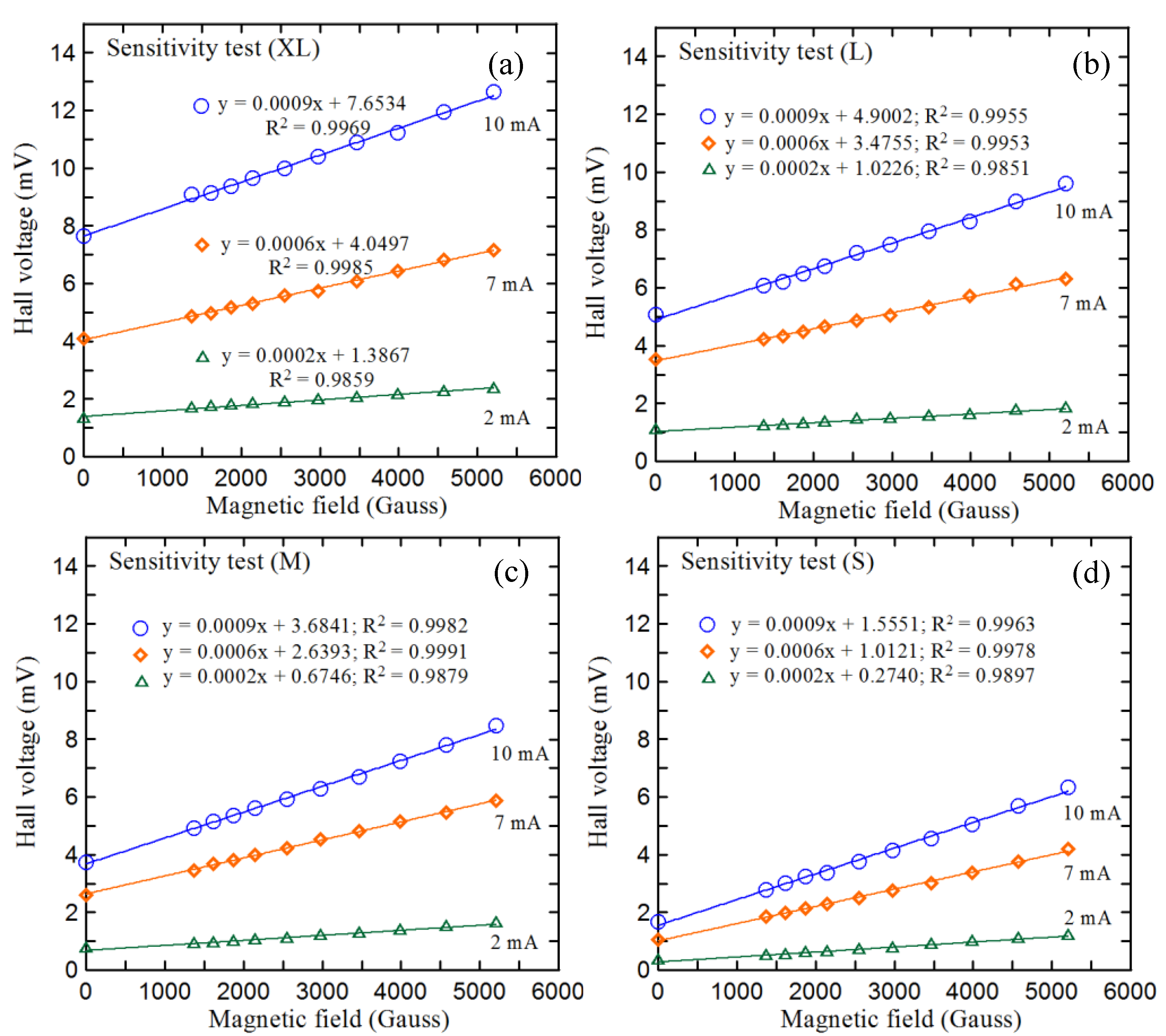
4.1. Sensitivity Test
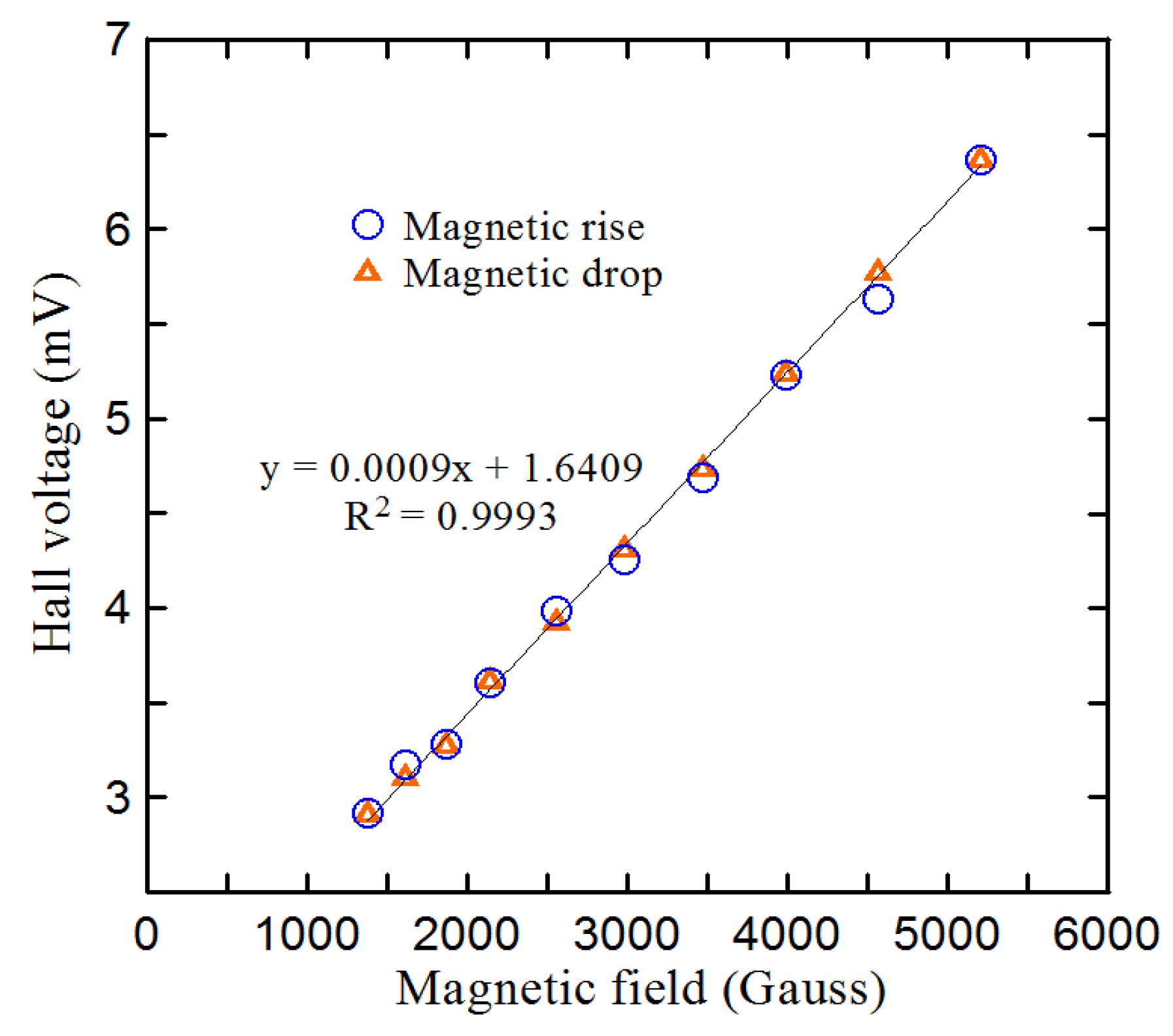
4.2. Hysteresis Test
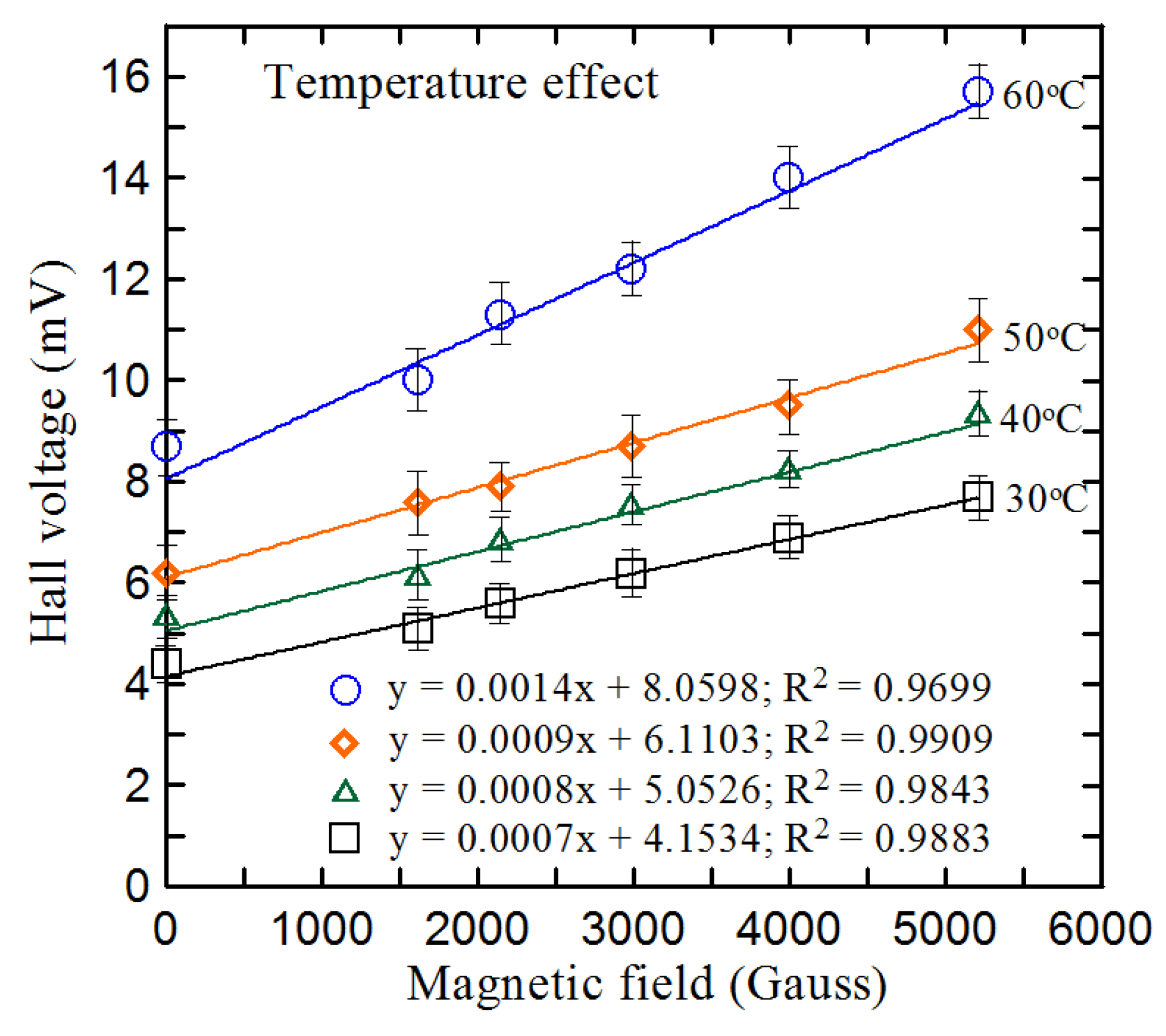
4.3. Temperature Effect Test
4.4. Time Response Test
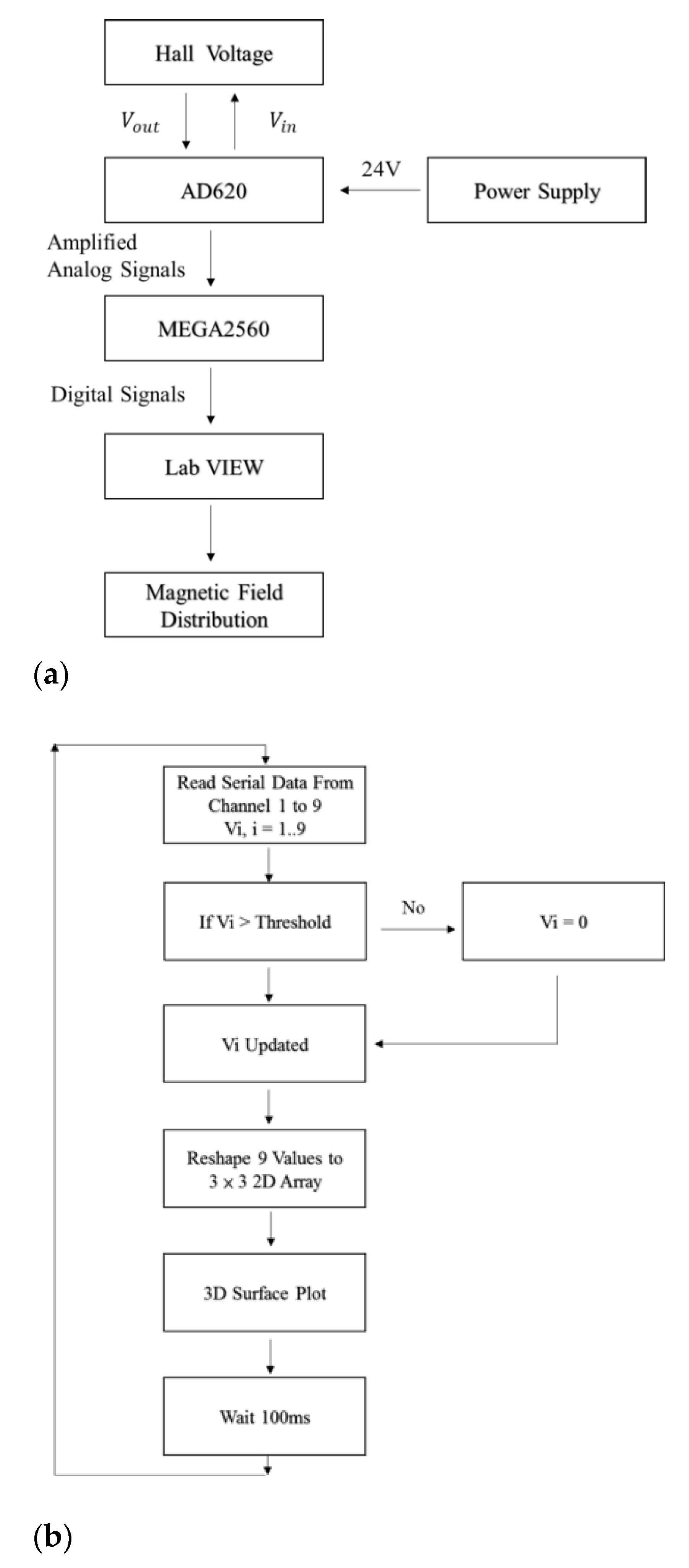
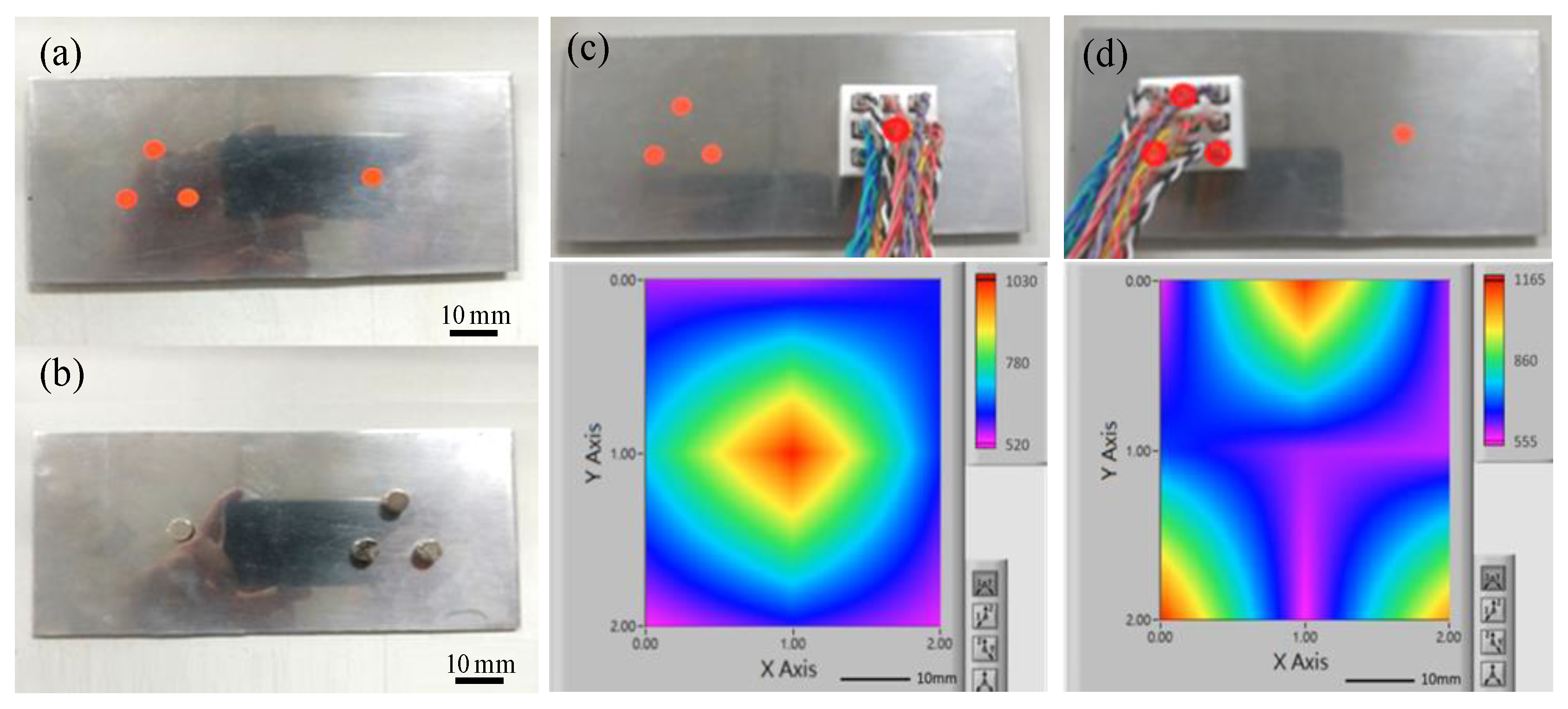
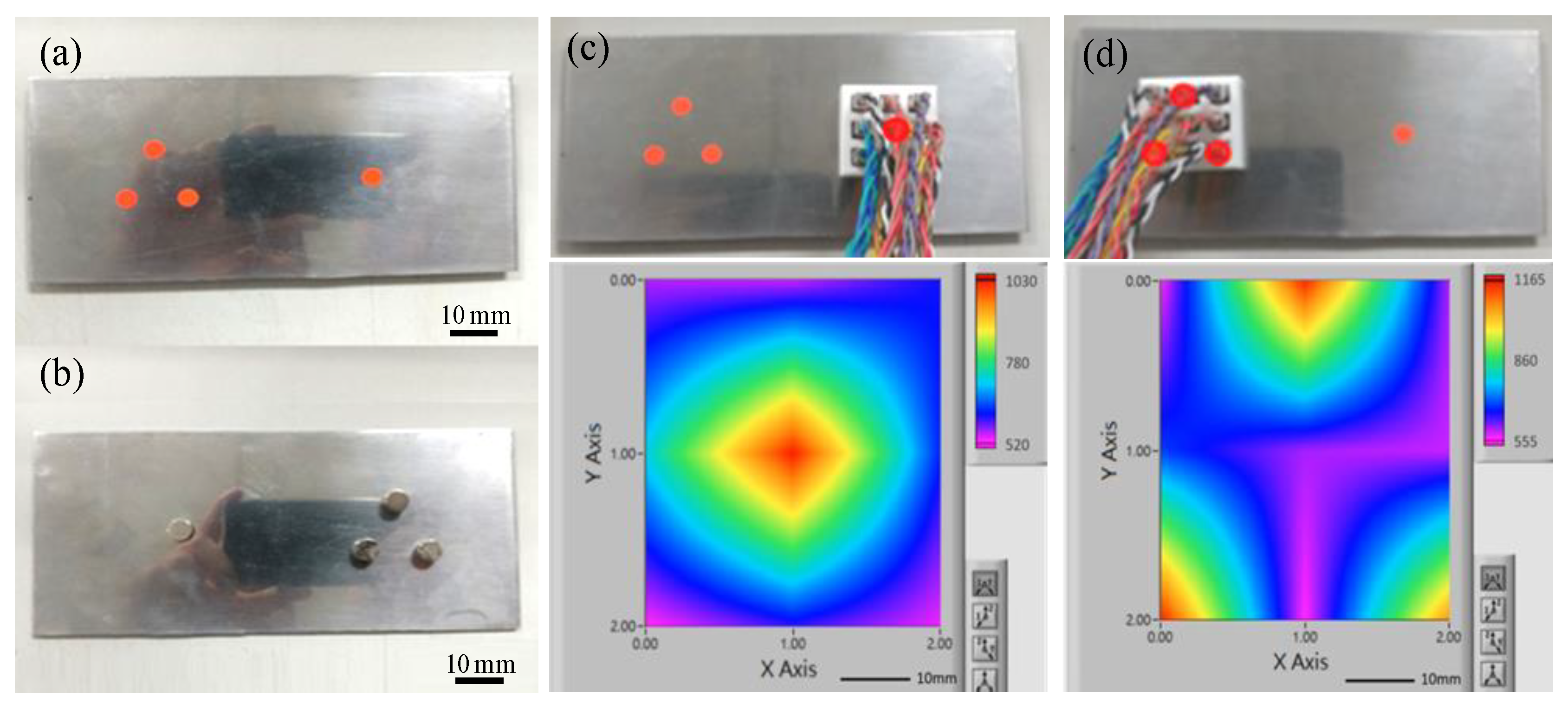
4.5. Integration Test
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Hao, Q.; Xiao, G. Low-frequency noise of magnetic sensors based on the anomalous Hall effect in Fe–Pt alloys. Sensors 2019, 19, 3537. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.N.; Dai, C.L. Micro magnetic field sensors manufactured using a standard 0.18-μm CMOS process. Micromachines 2018, 9, 393. [Google Scholar] [CrossRef] [Green Version]
- Fujiwara, K.; Satake, Y.; Shiogai, J.; Tsukazaki, A. Doping-induced enhancement of anomalous Hall coefficient in Fe-Sn nanocrystalline films for highly sensitive Hall sensors. APL Mater. 2019, 7, 111103. [Google Scholar] [CrossRef]
- Collomb, D.; Li, P.; Bending, S.J. Nanoscale graphene Hall sensors for high-resolution ambient magnetic imaging. Sci. Rep. 2019, 9, 14424. [Google Scholar] [CrossRef] [Green Version]
- Xuan, X. Recent advances in continuous-flow particle manipulations using magnetic fluids. Micromachines 2019, 10, 744. [Google Scholar] [CrossRef] [Green Version]
- Stern, M.; Cohen, M.; Danielli, A. Configuration and design of electromagnets for rapid and precise manipulation of magnetic beads in biosensing applications. Micromachines 2019, 10, 784. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Fukuda, T. Magnetically guided micromanipulation of magnetic microrobots for accurate creation of artistic patterns in liquid environment. Micromachines 2020, 11, 697. [Google Scholar] [CrossRef]
- Lee, S.; Hong, S.; Park, W.; Kim, W.; Lee, J.; Shin, K.; Kim, C.; Lee, D. High accuracy open-type current sensor with a differential planar Hall resistive sensor. Sensors 2018, 18, 2231. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, L.; Bi, J.; Xi, K.; Yan, G. Investigation of radiation effects on FD-SOI Hall sensors by TCAD simulations. Sensors 2020, 20, 3946. [Google Scholar] [CrossRef]
- Yatchev, I.; Sen, M.; Balabozov, I.; Kostov, I. Modelling of a Hall effect-based current sensor with an open core magnetic concentrator. Sensors 2018, 18, 1260. [Google Scholar] [CrossRef] [Green Version]
- Petruk, O.; Kachniarz, M.; Szewczyk, R. Novel method of offset voltage minimization in hall-effect sensor. Acta Phys. Pol. A 2017, 131, 1177. [Google Scholar] [CrossRef]
- Lin, C.H. Precision motion control of a linear permanent magnet synchronous machine based on linear optical-ruler sensor and Hall sensor. Sensors 2018, 18, 3345. [Google Scholar] [CrossRef] [Green Version]
- Roy, A.; Sampathkumar, P.; Kumar, P.S.A. Development of a very high sensitivity magnetic field sensor based on planar Hall effect. Measurement 2020, 156, 107590. [Google Scholar] [CrossRef]
- Liang, C.; Zhang, Y.; Li, Z.; Yuan, F.; Yang, G.; Song, K. Coil positioning for wireless power transfer system of automatic guided vehicle based on magnetic sensing. Sensors 2020, 20, 5304. [Google Scholar] [CrossRef]
- Ursel, T.; Olinski, M. Displacement estimation based on optical and inertial sensor fusion. Sensors 2021, 21, 1390. [Google Scholar] [CrossRef]
- Martinez-Garcia, M.; Zhang, Y.; Wan, J.; McGinty, J. Visually interpretable profile extraction with an autoencoder for health monitoring of industrial systems. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Osaka, Japan, 3–5 July 2019. [Google Scholar]
- Martinez-Garcia, M.; Zhang, Y.; Suzuki, K.; Zhang, Y.-D. Deep recurrent entropy adaptive model for system reliability monitoring. IEEE Trans. Ind. Inform. 2020, 17, 839. [Google Scholar] [CrossRef]
- Lozanova, S.; Ivanov, A.; Roumenin, C. A novel three-axis hall magnetic sensor. Procedia Eng. 2011, 25, 539–542. [Google Scholar] [CrossRef] [Green Version]
- Lozanova, S.; Noykov, S.; Roumenin, C. Two-axis silicon hall effect magnetometer. Sens. Actuators A Phys. 2017, 267, 177–181. [Google Scholar] [CrossRef]
- Zhao, B.; Shi, W.J.; Zhang, J.W.; Zhang, M.; Qi, X.; Li, J.X.; Tan, J.B. Six degrees of freedom displacement measurement system for wafer stage composed of Hall sensors. Sensors 2018, 18, 2030. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.; Zhang, Z.; Shi, R.; Liu, H.; Wang, Z.; Wang, S.; Peng, L.M. Batch-fabricated high-performance graphene Hall elements. Sci. Rep. 2013, 3, 1207. [Google Scholar] [CrossRef]
- Jones, D.; Wang, L.; Ghanbari, A.; Vardakastani, V.; Kedgley, A.E.; Gardiner, M.D.; Vincent, T.L.; Culmer, P.R.; Alazmani, A. Design and evaluation of magnetic Hall effect tactile sensors for use in sensorized splints. Sensors 2020, 20, 1123. [Google Scholar] [CrossRef] [Green Version]
- Berus, T.; Oszwaldowski, M.; Grabowski, J. High quality Hall sensors made of heavily doped n-InSb epitaxial films. Sens. Actuators A Phys. 2004, 116, 75–78. [Google Scholar] [CrossRef]
- Uzlu, B.; Wang, Z.; Lukas, S.; Otto, M.; Lemme, M.C.; Neumaier, D. Gate-tunable graphene-based Hall sensors on flexible substrates with increased sensitivity. Sci. Rep. 2019, 9, 18059. [Google Scholar] [CrossRef]
- Jovanovic, E.; Pesic, T.; Pantic, D. 3D simulation of cross-shaped hall sensor and its equivalent circuit model. In Proceedings of the 24th International Conference on Microelectronics (MIEL), Niš, Serbia, 16–19 May 2004; pp. 235–238. [Google Scholar]
- Wei, R.; Du, Y. Analysis of orthogonal coupling structure based on double three-contact vertical hall device. Micromachines 2019, 10, 610. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, L.; Bi, J.; Xi, K.; Majumdar, S.; Li, B. Performance optimization of FD-SOI hall sensors via 3D TCAD simulations. Sensors 2020, 20, 2751. [Google Scholar] [CrossRef] [PubMed]
- Kim, Y.; Lee, M.; Kim, Y.J. Selective growth and contact gap-fill of low resistivity Si via microwave plasma-enhanced CVD. Micromachines 2019, 10, 689. [Google Scholar] [CrossRef] [Green Version]
- Fraga, M.; Pessoa, R. Progresses in synthesis and application of SiC Films: From CVD to ALD and from MEMS to NEMS. Micromachines 2020, 11, 799. [Google Scholar] [CrossRef]
- Lee, A.H.; Lee, J.; Laiwalla, F.; Leung, V.; Huang, J.; Nurmikko, A.; Song, Y.K. A scalable and low stress post-CMOS processing technique for implantable microsensors. Micromachines 2020, 11, 925. [Google Scholar] [CrossRef]
- Puryear, J.R.; Yoon, J.; Kim, Y.T. Advanced fabrication techniques of microengineered physiological systems. Micromachines 2020, 11, 730. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, P.B.; Choi, S.B.; Song, B.K. A new approach to hyeteresis modelling for a piezoelectric actuator using Preisach model and recursive method with an application to open-loop position tracking control. Sens. Actuators A Phys. 2018, 270, 136. [Google Scholar] [CrossRef]
- Cholakova, I.M.; Takov, T.B.; Tsankov, R.T.; Simonne, N. Temperature influence on Hall sensors characteristics. In Proceedings of the 20th Telecommunications Forum TELFOR, Belgrade, Serbia, 20–22 November 2012; p. 967. [Google Scholar]
- Tang, W.; Lyu, F.; Wang, D.; Pan, H. A new design of a single-device 3D Hall sensor: Cross-shaped 3D Hall sensor. Sensors 2018, 18, 1065. [Google Scholar] [CrossRef] [PubMed] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| XL | L | M | S | ||
|---|---|---|---|---|---|
| working current 10 mA | offset voltage (mV) | 7.640 | 5.063 | 3.744 | 1.668 |
| sensitivity (μV/Gauss) | 0.923 | 0.914 | 0.930 | 0.909 | |
| R-square | 0.9969 | 0.9955 | 0.9982 | 0.9963 | |
| working current 7 mA | offset voltage (mV) | 4.083 | 3.541 | 2.613 | 1.056 |
| sensitivity (μV/Gauss) | 0.615 | 0.621 | 0.598 | 0.607 | |
| R-square | 0.9985 | 0.9953 | 0.9991 | 0.9978 | |
| working current 2 mA | offset voltage (mV) | 1.302 | 1.069 | 0.737 | 0.330 |
| sensitivity (μV/Gauss) | 0.214 | 0.196 | 0.231 | 0.208 | |
| R-square | 0.9859 | 0.9851 | 0.9879 | 0.9897 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-Y.; Lin, Y.-Y.; Kuo, C.-K.; Fu, L.-M. Design and Application of MEMS-Based Hall Sensor Array for Magnetic Field Mapping. Micromachines 2021, 12, 299. https://doi.org/10.3390/mi12030299
Lee C-Y, Lin Y-Y, Kuo C-K, Fu L-M. Design and Application of MEMS-Based Hall Sensor Array for Magnetic Field Mapping. Micromachines. 2021; 12(3):299. https://doi.org/10.3390/mi12030299
Chicago/Turabian StyleLee, Chia-Yen, Yu-Ying Lin, Chung-Kang Kuo, and Lung-Ming Fu. 2021. "Design and Application of MEMS-Based Hall Sensor Array for Magnetic Field Mapping" Micromachines 12, no. 3: 299. https://doi.org/10.3390/mi12030299