
Broadband Zero-Power Wakeup MEMS Device for Energy-Efficient Sensor Nodes

Abstract
:1. Introduction
2. Theory
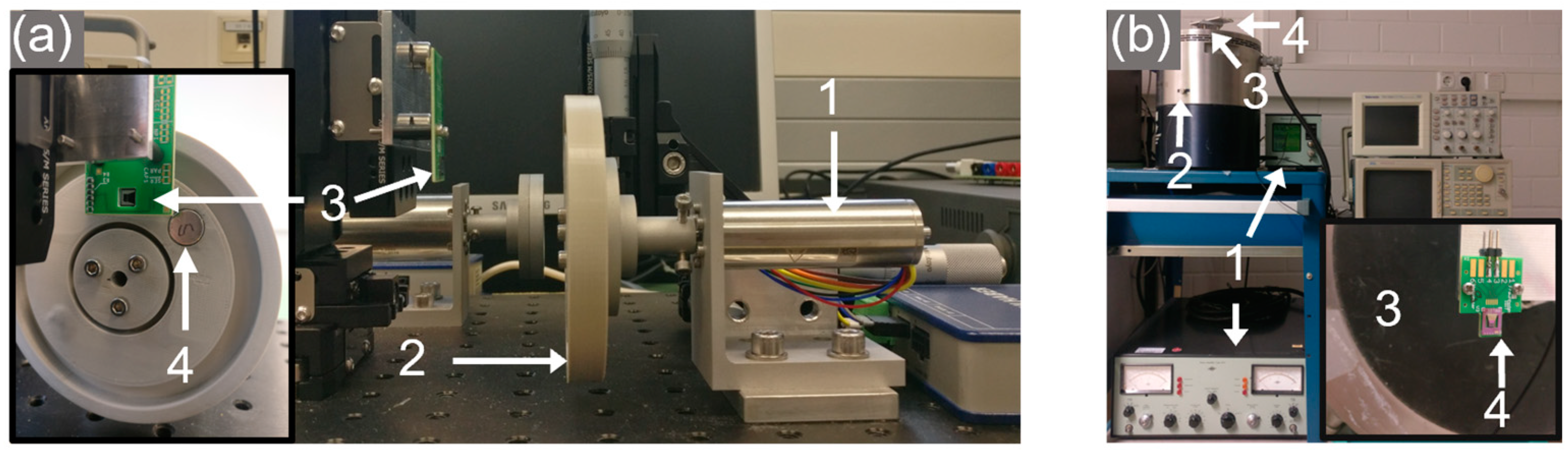
3. Experimental Setup
4. Experimental Results and Discussion
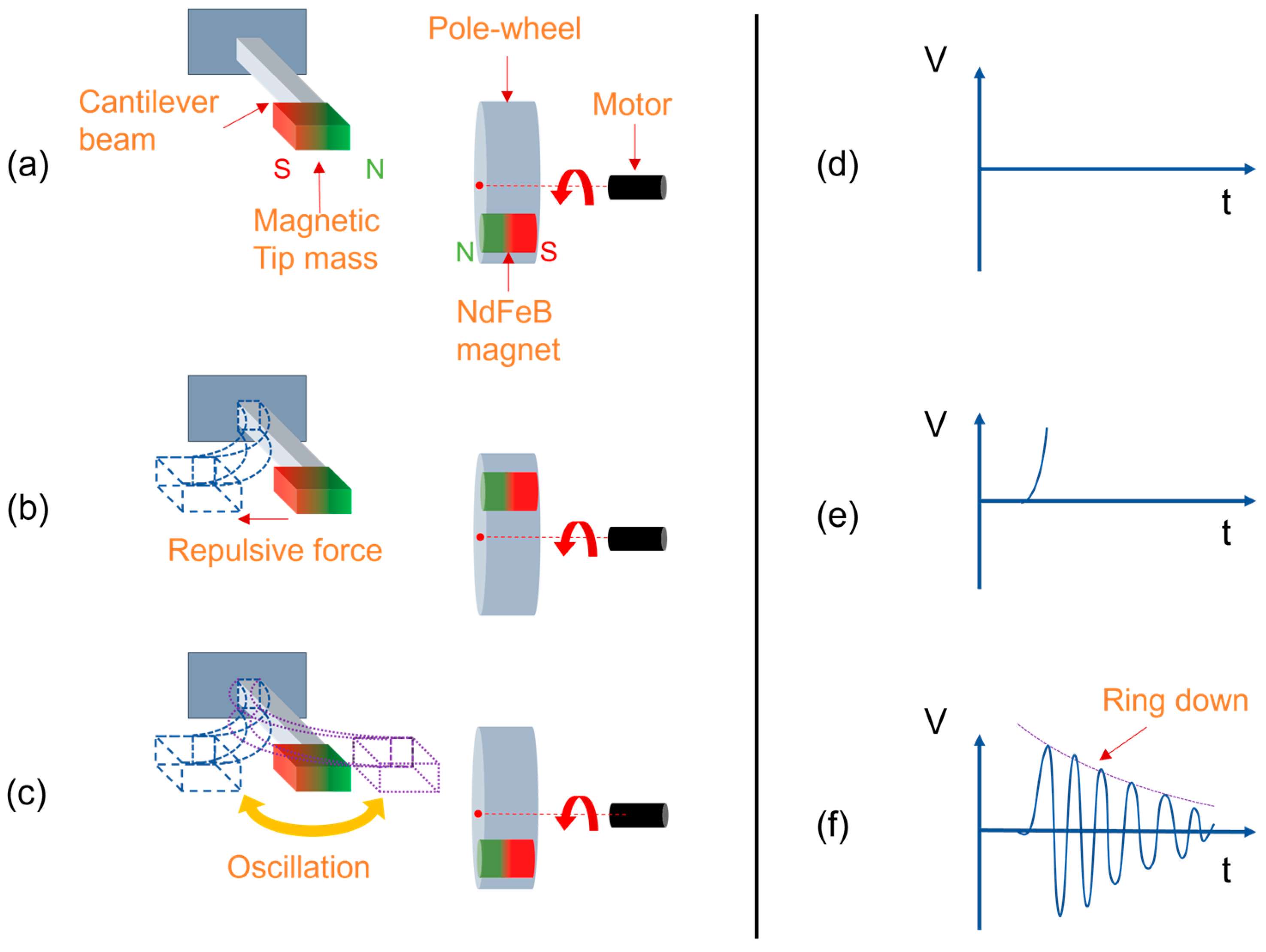
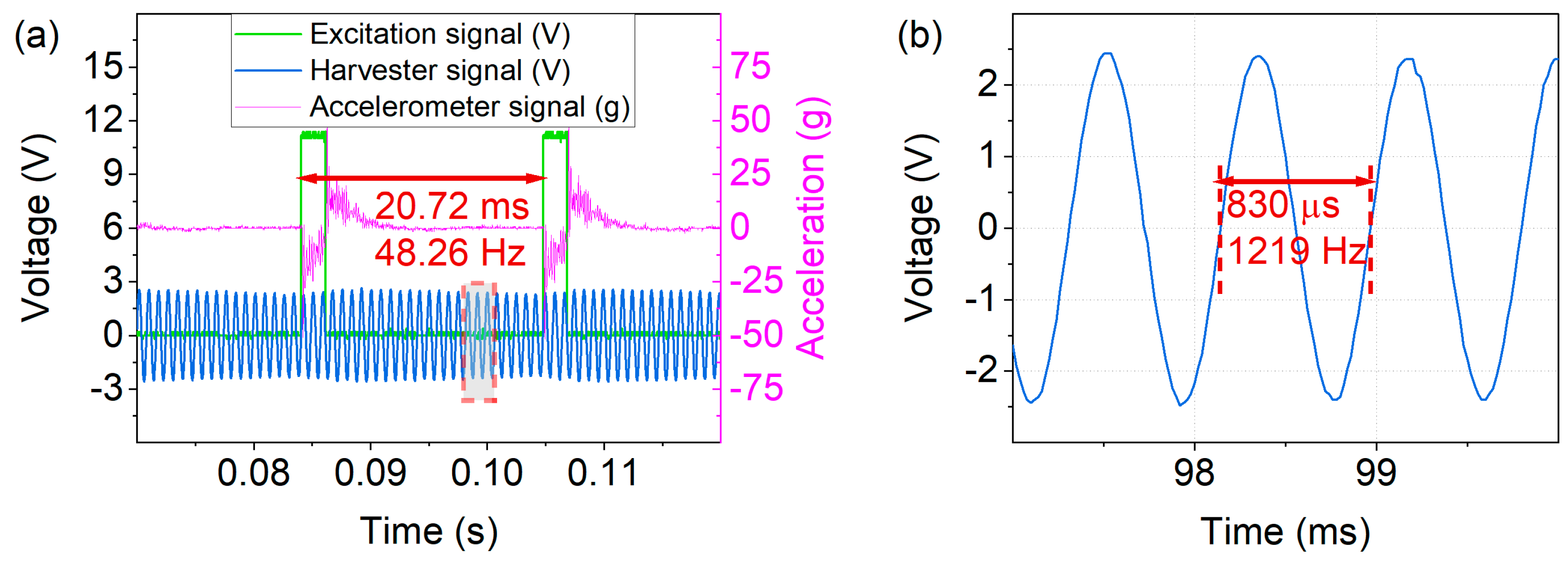
4.1. Magnetic Excitation
4.2. Mechanical Excitation
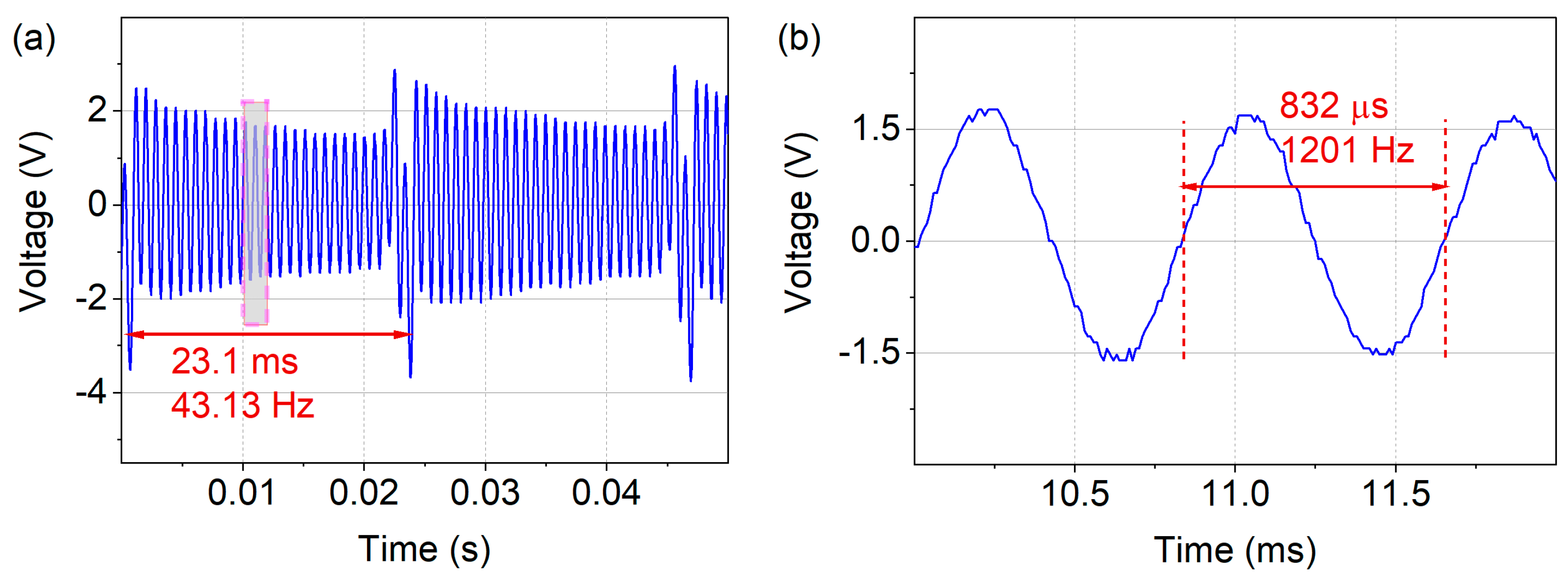
4.3. Broadband Low-Frequency Excitation
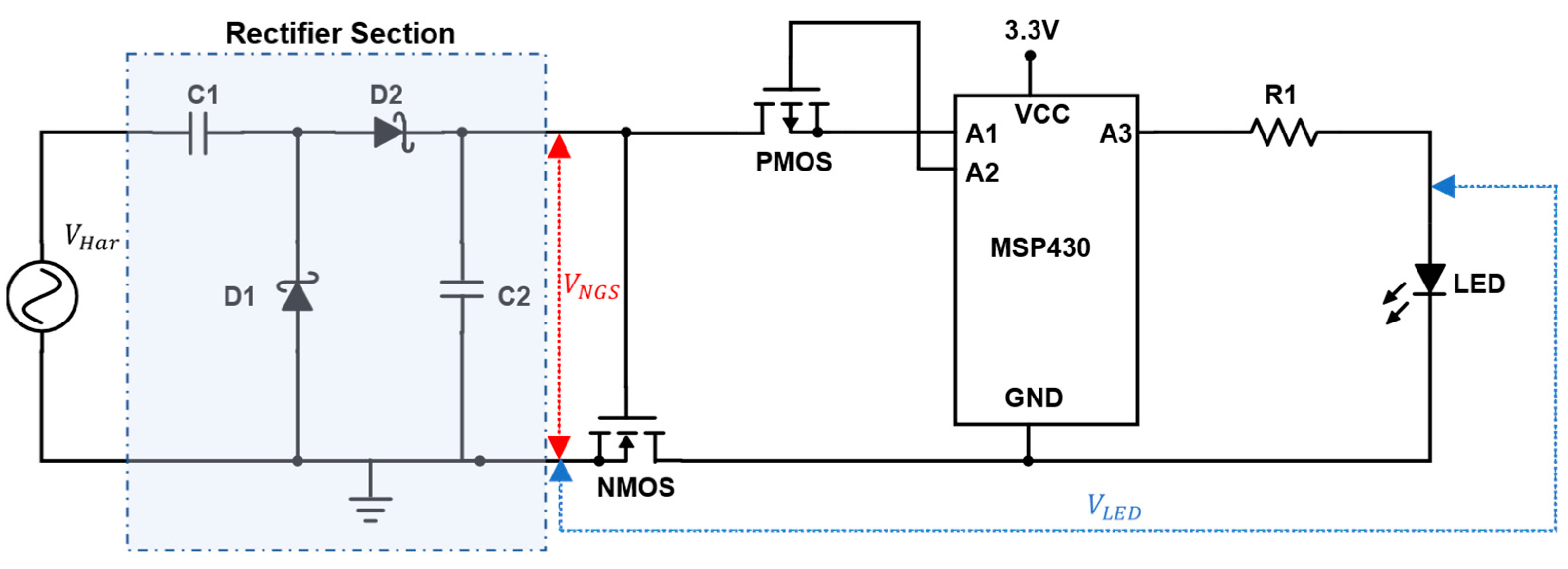
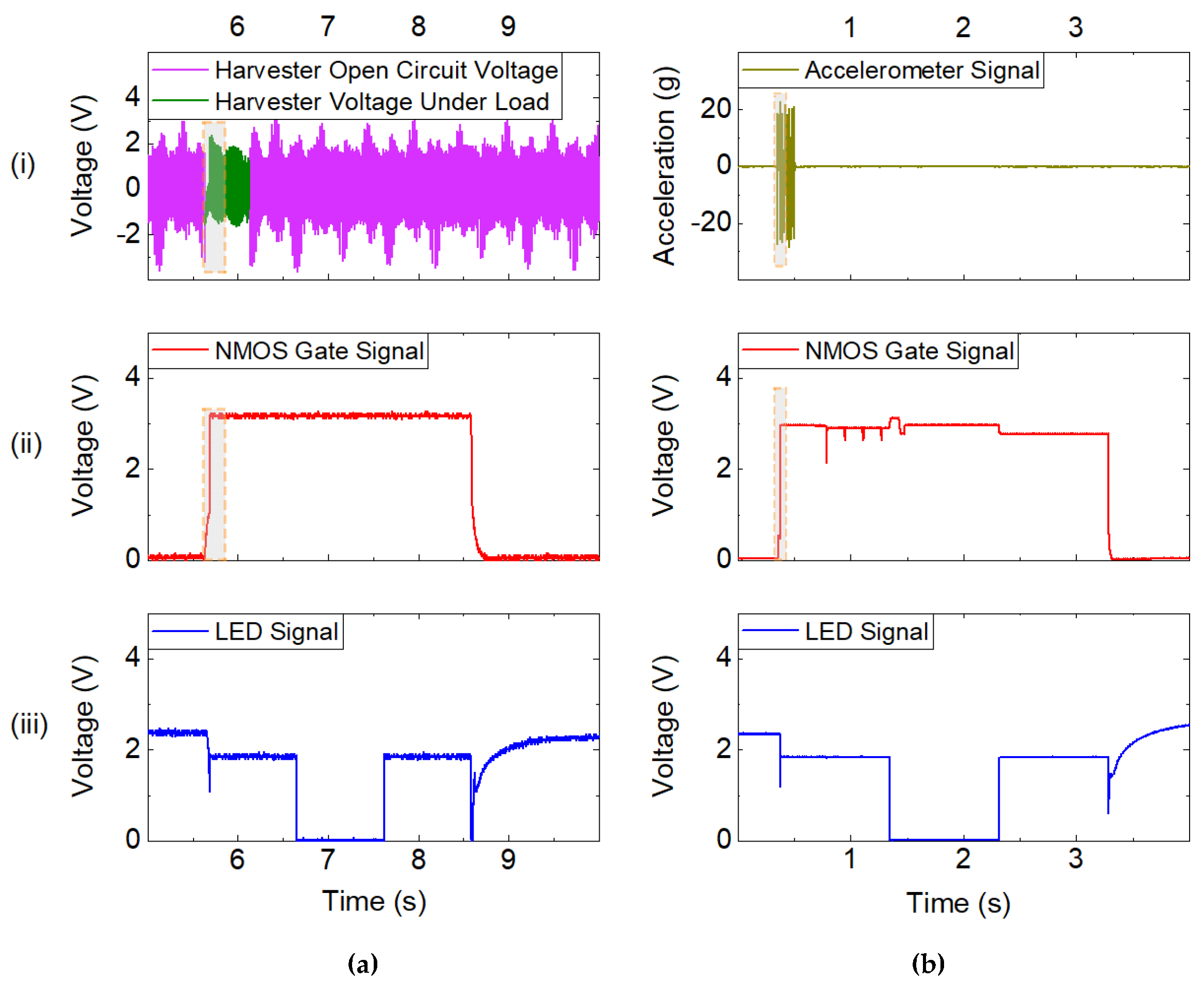
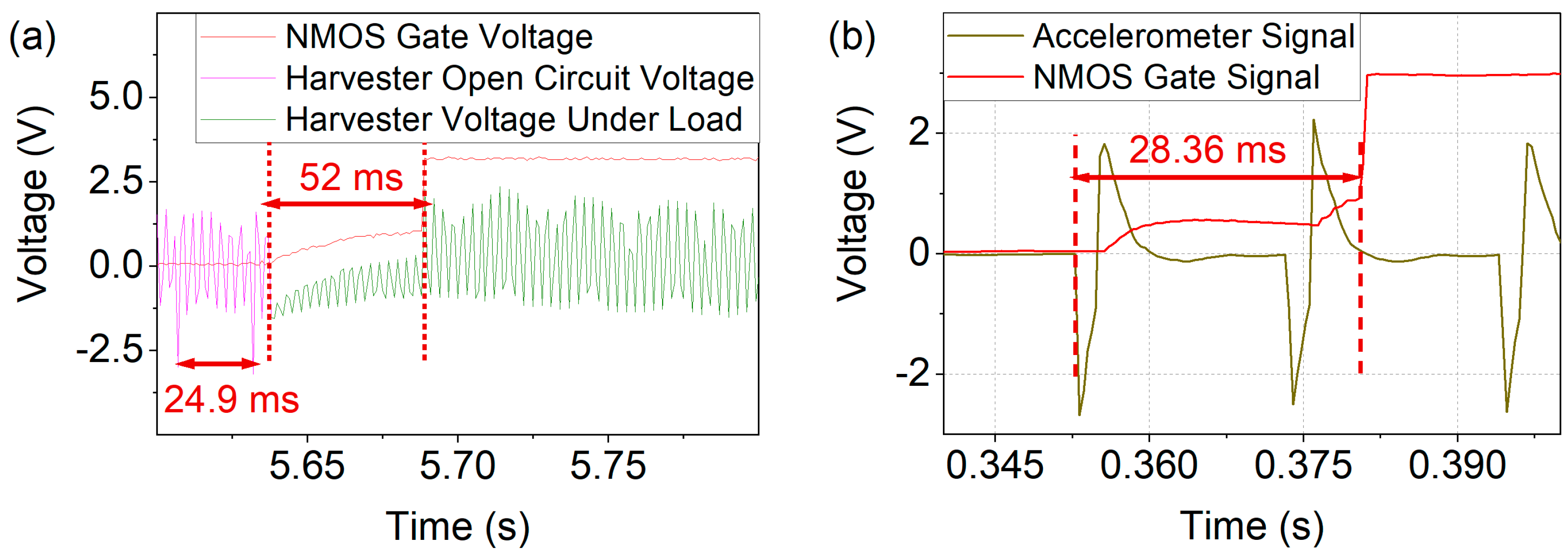
4.4. Wakeup Demonstration
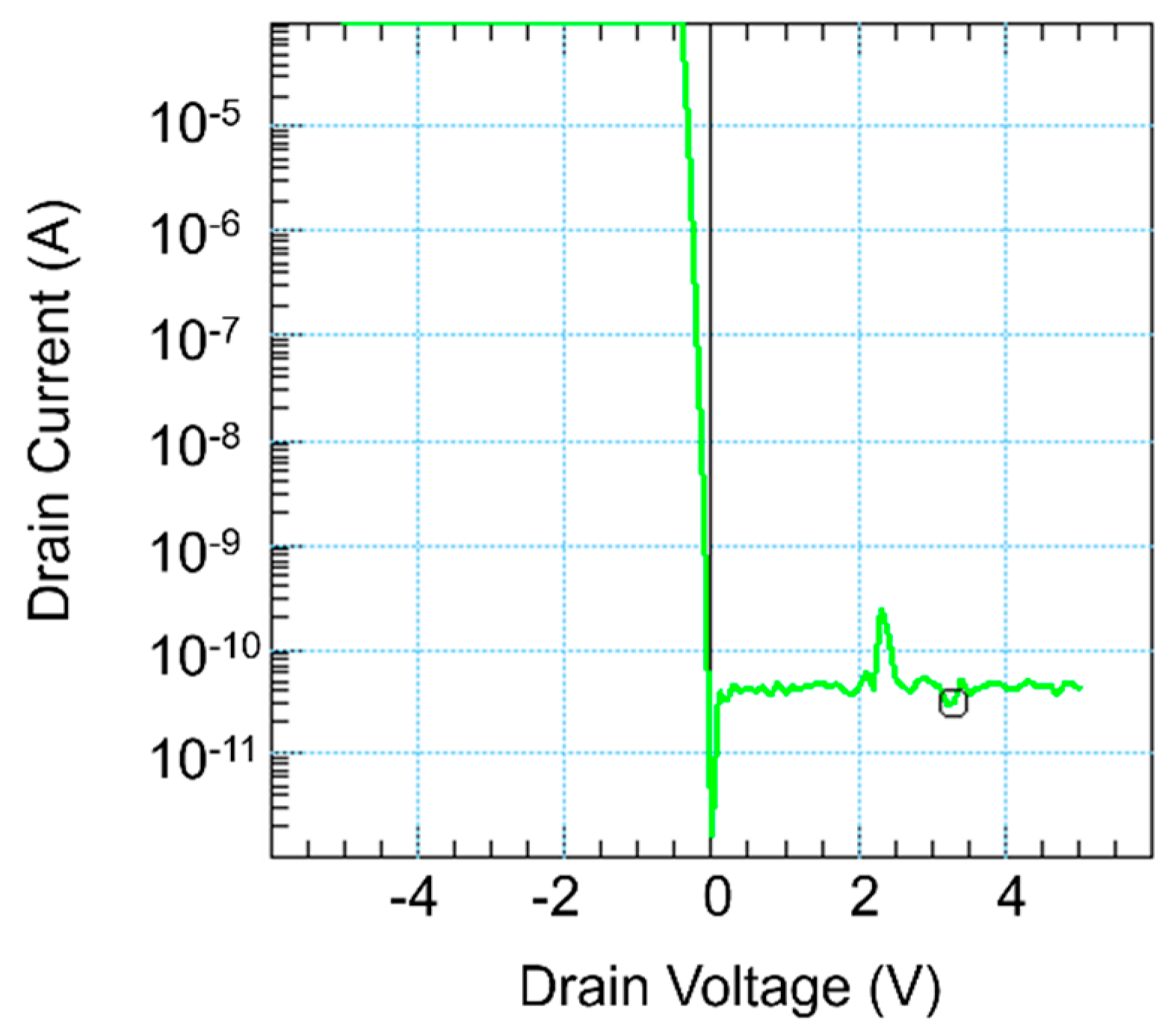
4.5. Stand-by Power Loss
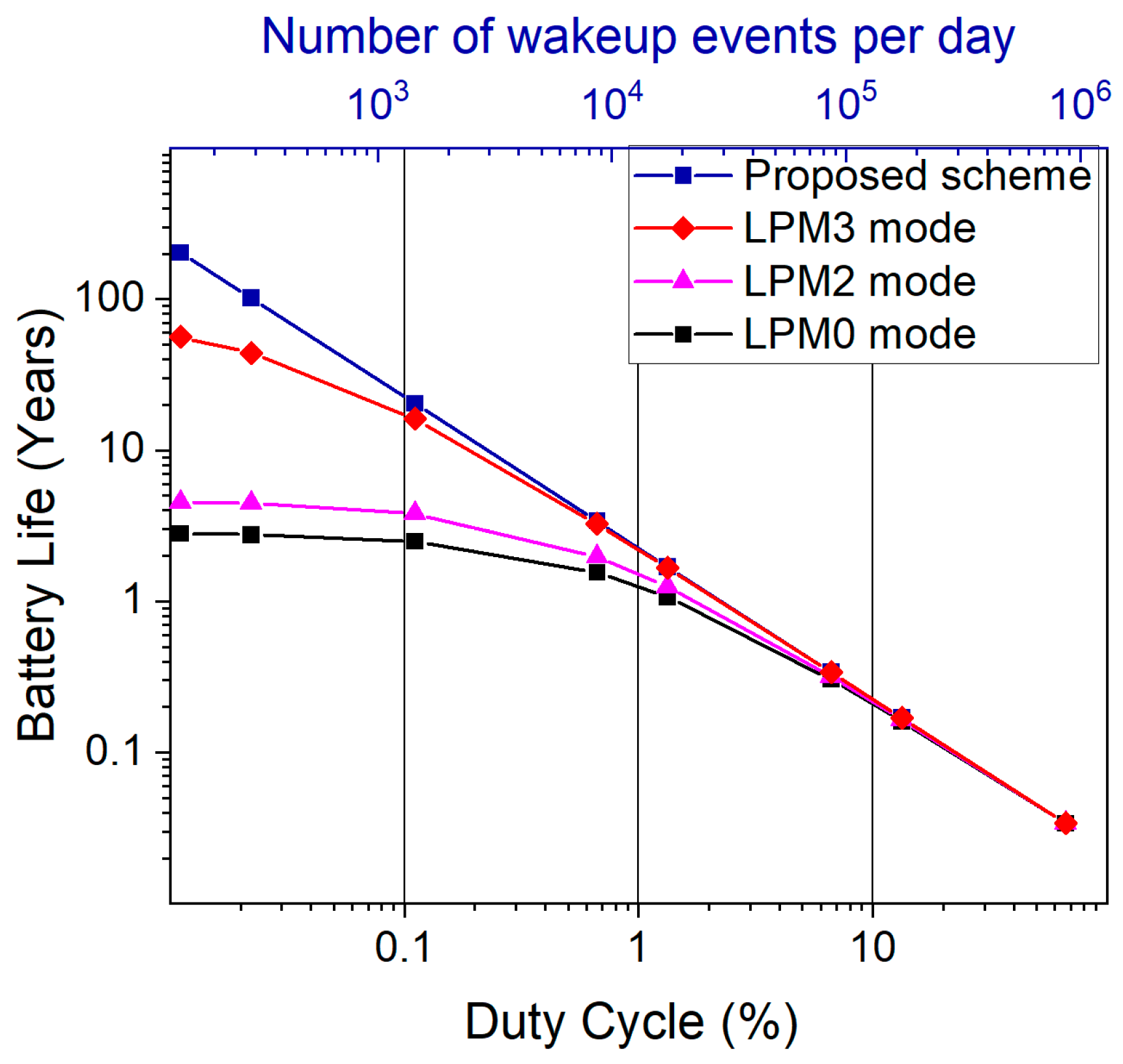
5. Estimation of Wakeup Benefit for Battery Lifetime Improvement
6. Conclusions and Outlook
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Romer, K.; Mattern, F. The design space of wireless sensor networks. IEEE Wirel. Commun. 2004, 11, 54–61. [Google Scholar] [CrossRef] [Green Version]
- Arshad, R.; Zahoor, S.; Shah, M.A.; Wahid, A.; Yu, H. Green IoT: An Investigation on Energy Saving Practices for 2020 and Beyond. IEEE Access 2017, 5, 15667–15681. [Google Scholar] [CrossRef]
- Sahoo, S.; Walke, P.; Nayak, S.K.; Rout, C.S.; Late, D.J. Recent developments in self-powered smart chemical sensors for wearable electronics. Nano Res. 2021, 14, 3669–3689. [Google Scholar] [CrossRef]
- Sahoo, S.; Krishnamoorthy, K.; Pazhamalai, P.; Mariappan, V.K.; Manoharan, S.; Kim, S.-J. High performance self-charging supercapacitors using a porous PVDF-ionic liquid electrolyte sandwiched between two-dimensional graphene electrodes. J. Mater. Chem. A 2019, 7, 21693–21703. [Google Scholar] [CrossRef]
- Tan, Y.H.; Hitesh, A.; Li, K.H.H. Application of Machine Learning Algorithm on MEMS-Based Sensors for Determination of Helmet Wearing for Workplace Safety. Micromachines 2021, 12, 449. [Google Scholar] [CrossRef]
- Gerber, D.L.; Meier, A.; Liou, R.; Hosbach, R. Emerging Zero-Standby Solutions for Miscellaneous Electric Loads and the Internet of Things. Electronics 2019, 8, 870. [Google Scholar] [CrossRef] [Green Version]
- Pinrod, V.; Pancoast, L.; Davaji, B.; Lee, S.; Ying, R.; Molnar, A.; Lal, A. Zero-power sensors with near-zero-power wakeup switches for reliable sensor platforms. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems (MEMS), Las Vegas, NV, USA, 22–26 January 2017; pp. 1236–1239. [Google Scholar]
- Jiang, H.; Wang, P.-H.P.; Gao, L.; Sen, P.; Kim, Y.-H.; Rebeiz, G.; Hall, D.; Mercier, P. 24.5 A 4.5 nW wake-up radio with -69dBm sensitivity. In Proceedings of the 2017 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 5–9 February 2017; IEEE: New York, NY, USA, 2017; pp. 416–417. [Google Scholar]
- Chen, N.; Jung, H.; Jabbar, H.; Sung, T.; Wei, T. A piezoelectric impact-induced vibration cantilever energy harvester from speed bump with a low-power power management circuit. Sens. Actuators A Phys. 2017, 254, 134–144. [Google Scholar] [CrossRef]
- Zhang, C.; Dai, K.; Liu, D.; Yi, F.; Wang, X.; Zhu, L.; You, Z. Ultralow Quiescent Power-Consumption Wake-Up Technology Based on the Bionic Triboelectric Nanogenerator. Adv. Sci. 2020, 7, 1–10. [Google Scholar] [CrossRef]
- Tong, T.; Liu, G.; Lin, Y.; Xu, S.; Zhang, C. A Near-Zero Power Triboelectric Wake-Up System for Autonomous Beaufort Scale of Wind Force Monitoring. Nanoenergy Adv. 2021, 1, 121–130. [Google Scholar] [CrossRef]
- Thainiramit, P.; Yingyong, P.; Isarakorn, D. Impact-Driven Energy Harvesting: Piezoelectric Versus Triboelectric Energy Harvesters. Sensors 2020, 20, 5828. [Google Scholar] [CrossRef]
- Wu, T.; Chen, G.; Cassella, C.; Zhu, W.Z.; Assylbekova, M.; Rinaldi, M.; McGruer, N. Design and fabrication of AlN RF MEMS switch for near-zero power RF wake-up receivers. In 2017 IEEE SENSORS; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Reger, R.W.; Barney, B.; Yen, S.; Satches, M.; Wiwi, M.; Young, A.I.; Delaney, M.A.; Griffin, B.A. Near-zero power accelerometer wakeup system. In 2017 IEEE SENSORS; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Tomimatsu, Y.; Kuwana, K.; Kobayashi, T.; Itoh, T.; Maeda, R. A Piezoelectric Flow Sensor for Wake-Up Switch of Wireless Sensor Network Node. In Proceedings of the 2012 Second Workshop on Design, Control and Software Implementation for Distributed MEMS, Besancon, France, 4 February–4 March 2012; IEEE: New York, NY, USA, 2012; pp. 53–57, ISBN 978-1-4673-1203-5. [Google Scholar]
- Yang, S.-H.; Chen, X.; Yang, L.; Chao, B.; Cao, J. A case study of internet of things: A wireless household water consumption monitoring system. In Proceedings of the 2015 IEEE 2nd World Forum on Internet of Things (WF-IoT), Milan, Italy, 14–16 December 2015; pp. 681–686. [Google Scholar]
- Kumar Jha, M.; Kumari Sah, R.; Rashmitha, M.S.; Sinha, R.; Sujatha, B.; Suma, K.V. Smart Water Monitoring System for Real-Time Water Quality and Usage Monitoring. In Proceedings of the 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 7 November–7 December 2018; IEEE: New York, NY, USA, 2018; pp. 617–621, ISBN 978-1-5386-2456-2. [Google Scholar]
- Tang, L.; Yang, Y.; Soh, C.K. Toward Broadband Vibration-based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2010, 21, 1867–1897. [Google Scholar] [CrossRef]
- Twiefel, J.; Westermann, H. Survey on broadband techniques for vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2013, 24, 1291–1302. [Google Scholar] [CrossRef]
- Lisec, T.; Behrmann, O.; Gojdka, B. PowderMEMS—A generic microfabrication technology for integrated three-dimensional functional microstructures. Micromachines 2022, 13, 398. [Google Scholar] [CrossRef]
- Lisec, T.; Bodduluri, M.T.; Schulz-Walsemann, A.-V.; Blohm, L.; Pieper, I.; Gu-Stoppel, S.; Niekiel, F.; Lofink, F.; Wagner, B. Integrated High Power Micro Magnets for MEMS Sensors and Actuators. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (Transducers & Eurosensors XXXIII), Berlin, Germany, 23–27 June 2019; IEEE: Piscataway, NJ, USA, 2019. ISBN 978-1-5386-8104-6. [Google Scholar]
- Bodduluri, M.T.; Dankwort, T.; Lisec, T.; Grünzig, S.; Böhnhardt, S.; Fiedler, R.; Landwehr, M.; Khare, A.; Ahmed, M.; Gojdka, B. Fully Integrated High-Performance MEMS Energy Harvester for Mechanical and Contactless Magnetic excitation in Resonance and at low Frequencies. Micromachines, under review.
- Miah, A.H.; Heum, D.; Park, J.-Y. Low Frequency Vibration Energy Harvester Using Stopper-Engaged Dynamic Magnifier for Increased Power and Wide Bandwidth. J. Electr. Eng. Technol. 2016, 11, 707–714. [Google Scholar] [CrossRef] [Green Version]
- Renaud, M.; Fiorini, P.; Schaijk, R.; van Hoof, C. Harvesting energy from the motion of human limbs: The design and analysis of an impact-based piezoelectric generator. Smart Mater. Struct. 2009, 18, 1–16. [Google Scholar] [CrossRef]
- Yang, Y.; Shen, Q.; Jin, J.; Wang, Y.; Qian, W.; Yuan, D. Rotational piezoelectric wind energy harvesting using impact-induced resonance. Appl. Phys. Lett. 2014, 105, 053901. [Google Scholar] [CrossRef]
- Pillatsch, P.; Yeatman, E.; Holmes, A. A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body applications. Sens. Actuators A Phys. 2014, 206, 178–185. [Google Scholar] [CrossRef]
- Kulah, H.; Najafi, K. Energy Scavenging From Low-Frequency Vibrations by Using Frequency Up-Conversion for Wireless Sensor Applications. Sens. J. IEEE 2008, 8, 261–268. [Google Scholar] [CrossRef]
- Xue, T.; Roundy, S. Analysis of Magnetic Plucking Configurations for Frequency Up-Converting Harvesters. J. Phys. Conf. Ser. 2015, 660, 012098. [Google Scholar] [CrossRef]
- Fu, H.; Yeatman, E.M. A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 2017, 125, 152–161. [Google Scholar] [CrossRef] [Green Version]
- Dauksevicius, R.; Kleiva, A.; Grigaliunas, V. Analysis of magnetic plucking dynamics in a frequency up-converting piezoelectric energy harvester. Smart Mater. Struct. 2018, 27, 085016. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. An experimentally validated bimorph cantilever model for piezoelectric energy harvesting from base excitations. Smart Mater. Struct. 2009, 18, 1–18. [Google Scholar] [CrossRef]
- Roundy, S.; Wright, P.K.; Rabaey, J.M. Energy Scavenging for Wireless Sensor Networks with Special Focus on Vibrations; Springer: New York, NY, USA, 2004. [Google Scholar]
- Pillatsch, P.; Yeatman, E.M.; Holmes, A.S. Magnetic plucking of piezoelectric beams for frequency up-converting energy harvesters. Smart Mater. Struct. 2014, 23, 025009. [Google Scholar] [CrossRef]
- Shu, Y.C.; Wang, W.C.; Chang, Y.P. Electrically rectified piezoelectric energy harvesting induced by rotary magnetic plucking. Smart Mater. Struct. 2018, 27, 125006. [Google Scholar] [CrossRef]
- Lo, Y.C.; Chen, C.C.; Shu, Y.C.; Lumentut, M.F. Broadband piezoelectric energy harvesting induced by mixed resonant modes under magnetic plucking. Smart Mater. Struct. 2021, 30, 1–12. [Google Scholar] [CrossRef]
- Lisec, T.; Reimer, T.; Knez, M.; Chemnitz, S.; Schulz-Walsemann, A.V.; Kulkarni, A. A Novel Fabrication Technique for MEMS Based on Agglomeration of Powder by ALD. J. Microelectromech. Syst. 2017, 26, 1093–1098. [Google Scholar] [CrossRef]
- Yamawaki, A.; Serikawa, S. Door Monitoring System Using Sensor Node with Zero Standby Power. In Transactions on Engineering Technologies; Ao, S.-I., Kim, H.K., Huang, X., Castillo, O., Eds.; Springer: Singapore, 2017; pp. 73–87. ISBN 978-981-10-3950-8. [Google Scholar]
- Yamawaki, A.; Serikawa, S. Battery Life Estimation of Sensor Node with Zero Standby Power Consumption. In Proceedings of the 2016 IEEE Intl Conference on Computational Science and Engineering (CSE) and IEEE Intl Conference on Embedded and Ubiquitous Computing (EUC) and 15th Intl Symposium on Distributed Computing and Applications for Business Engineering (DCABES), Paris, France, 24–26 August 2016; IEEE: New York, NY, USA, 2016; pp. 166–172. [Google Scholar]
- Wines, M.; Braathen, M. Measuring the Power Consumption on eZ430-RF2480; Application Note AN057; Texas Instruments: Dallas, TX, USA, 2008; Available online: http://users.ece.utexas.edu/~valvano/EE345L/Labs/Fall2011/MeasuringMicrocontrollerPower.pdf (accessed on 1 March 2022).
- Texas Instruments. MSP430F22x2, MSP430F22x4 Mixed Signal Microcontroller Datasheet (Rev. G). Available online: https://www.ti.com/lit/ds/slas504g/slas504g.pdf (accessed on 3 December 2021).
- Yarar, E.; Meyners, D.; Quandt, E.; Fichtner, S.; Hayes, P.; Piorra, A.; Reimer, T.; Lisec, T.; Frank, P.; Wagner, B.; et al. MEMS-Based AlScN Resonating Energy Harvester With Solidified Powder Magnet. J. Microelectromech. Syst. 2019, 28, 1019–1031. [Google Scholar] [CrossRef]
- Bodduluri, M.T.; Gojdka, B.; Lisec, T.; Lofink, F. Investigation of wafer-level integrated permanent micromagnets for MEMS fabrication. Micromachines, under review.
- Chebrolu, K.; Raman, B.; Mishra, N.; Valiveti, P.K.; Kumar, R. Brimon: A Sensor Network System for Railway Bridge Monitoring. In Proceedings of the 6th International Conference on Mobile Systems, Applications, and Services, Breckenridge, CO, USA, 16–18 May 2005; Association for Computing Machinery: New York, NY, USA, 2008; pp. 2–14, ISBN 978-1-6055-8139-2. [Google Scholar]
- Ren-Guey, L.; Kuei-Chien, C.; Shao-Shan, C.; Chien-Chih, L.; Hsin-Sheng, L.; Ming-Shyan, W. A backup routing with wireless sensor network for bridge monitoring system. In Proceedings of the 4th Annual Communication Networks and Services Research Conference (CNSR’06), Moncton, NB, Canada, 24–25 May 2006; IEEE Computer Society: Washington, DC, USA, 2006; pp. 157–161. [Google Scholar]
- Bedon, C.; Bergamo, E.; Izzi, M.; Noè, S. Prototyping and validation of MEMS accelerometers for structural health monitoring—The case study of the Pietratagliata cable-stayed bridge. J. Sens. Actuator Netw. 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- Karpiriski, M.; Senart, A.; Cahill, V. Sensor networks for smart roads. In Proceedings of the Fourth Annual IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOMW′06), Pisa, Italy, 13–17 March 2006; IEEE: New York, NY, USA, 2006; pp. 310–314. [Google Scholar]
- Kitazawa, H.; Saito, K.; Ishikawa, Y. Effect of Difference in Acceleration and Velocity Change on Product Damage Due to Repetitive Shock. Packag. Technol. Sci. 2014, 27, 221–230. [Google Scholar] [CrossRef]
- Malinowski, M.; Moskwa, M.; Feldmeier, M.; Laibowitz, M.; Paradiso, J.A. CargoNet: A Low-Cost Micropower Sensor Node Exploiting Quasi-Passive Wakeup for Adaptive Asychronous Monitoring of Exceptional Events. In Proceedings of the 5th International Conference on Embedded Networked Sensor Systems, Sydney, Australia, 6–9 November 2007; Association for Computing Machinery: New York, NY, USA, 2007; pp. 145–159, ISBN 978-1-5959-3763-6. [Google Scholar]
- Elfrink, R.; Matova, S.; de Nooijer, C.; Jambunathan, M.; Goedbloed, M.; van de Molengraft, J.; Pop, V.; Vullers, R.; Renaud, M.; van Schaijk, R. Shock induced energy harvesting with a MEMS harvester for automotive applications. In Proceedings of the 2011 International Electron Devices Meeting, Washington, DC, USA, 5–7 December 2011; IEEE: New York, NY, USA, 2011; pp. 29.5.1–29.5.4. [Google Scholar]
- Dankwort, T.; Yarar, E.; Gruenzig, S.; Gojdka, B.; Fichtner, S.; Lofink, F. Enhancing the performance of piezoelectric energy harvesters by integrating AlScN piezoelectric thin film. In Proceedings of the MikroSystemTechnik Congress 2021, Stuttgart-Ludwigsburg, Germany, 8–10 November 2021; VDE: Berlin, Germany, 2021; pp. 559–561. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design | Tip Mass Area (Length × Width) | Beam Length | Width at Clamped End | Cantilever Volume Including Tip |
|---|---|---|---|---|
| H02 | 1.5 × 1 mm2 | 3.25 mm | 3.2 mm | 0.924 mm3 |
| H03 | 1.9 × 1 mm2 | 3.05 mm | 3.5 mm | 1.175 mm3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, M.; Dankwort, T.; Grünzig, S.; Lange, V.; Gojdka, B. Broadband Zero-Power Wakeup MEMS Device for Energy-Efficient Sensor Nodes. Micromachines 2022, 13, 407. https://doi.org/10.3390/mi13030407
Ahmed M, Dankwort T, Grünzig S, Lange V, Gojdka B. Broadband Zero-Power Wakeup MEMS Device for Energy-Efficient Sensor Nodes. Micromachines. 2022; 13(3):407. https://doi.org/10.3390/mi13030407
Chicago/Turabian StyleAhmed, Minhaz, Torben Dankwort, Sven Grünzig, Volker Lange, and Björn Gojdka. 2022. "Broadband Zero-Power Wakeup MEMS Device for Energy-Efficient Sensor Nodes" Micromachines 13, no. 3: 407. https://doi.org/10.3390/mi13030407