
Development of a Soft Robotics Module for Active Control of Sitting Comfort

 , , , and
, , , and
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
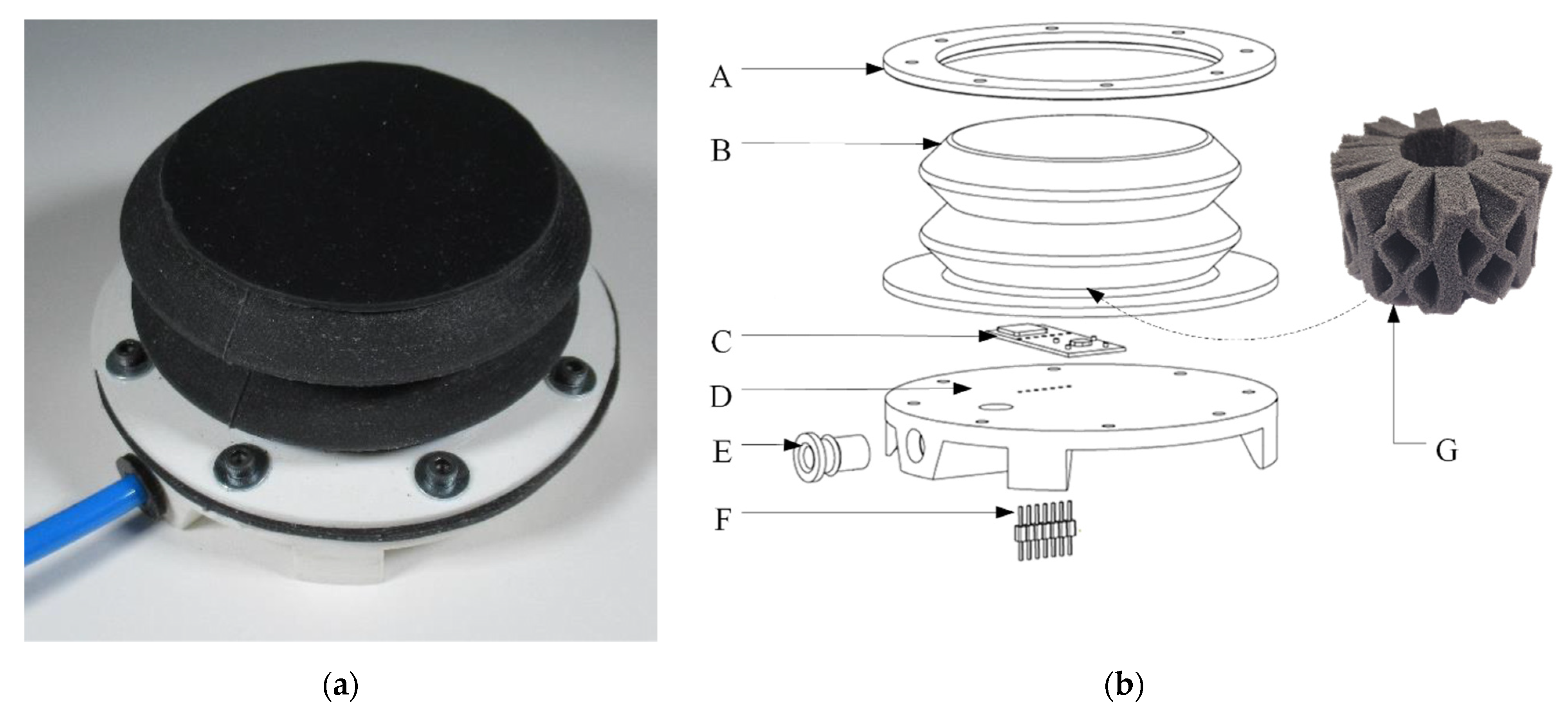
2. Components of the Soft Robotics Module
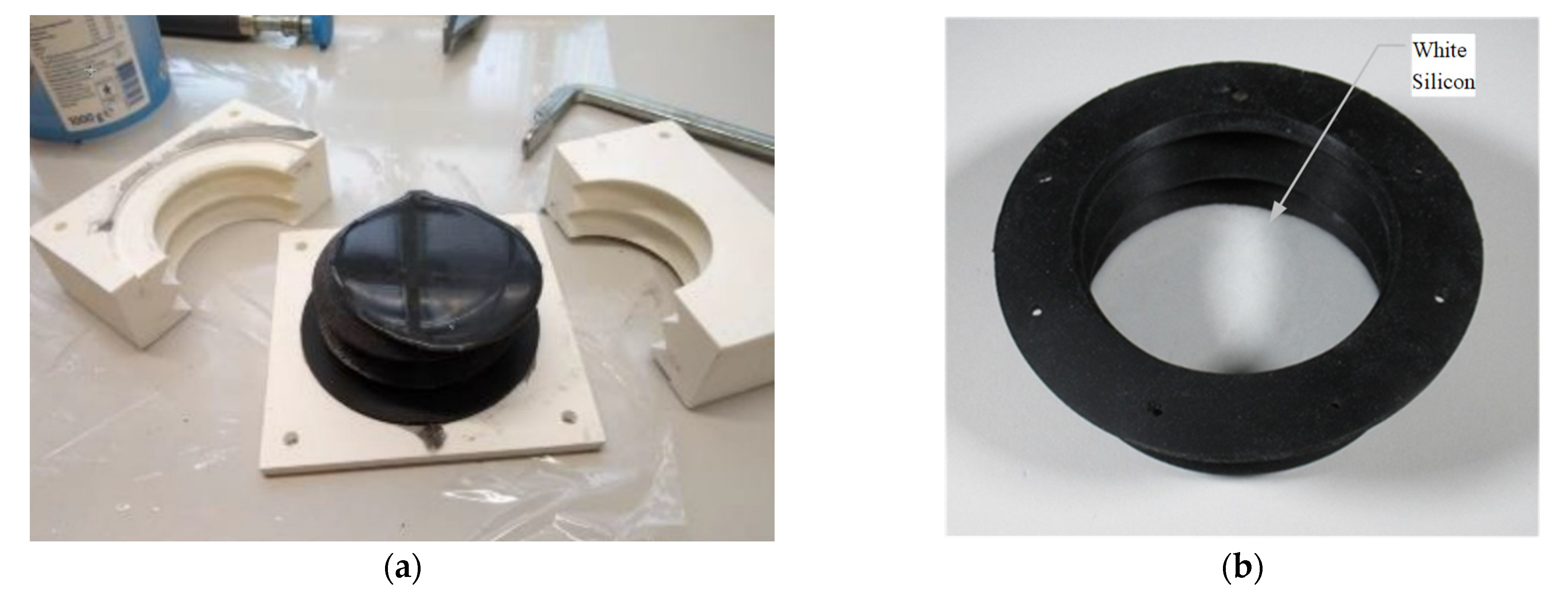
2.1. The Bellow
2.2. The Sensor Breakout
3. Data-Driven Control of the Module
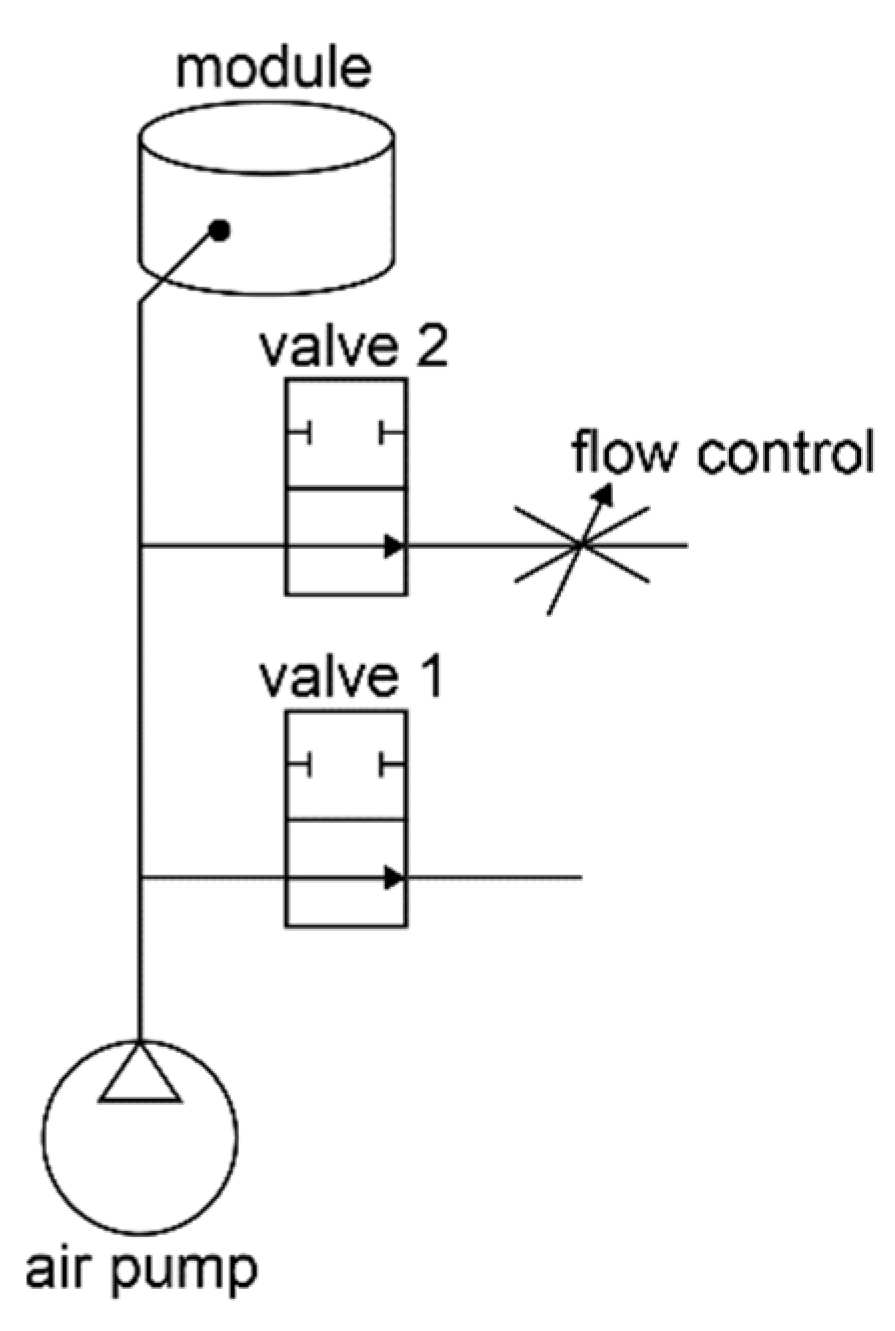
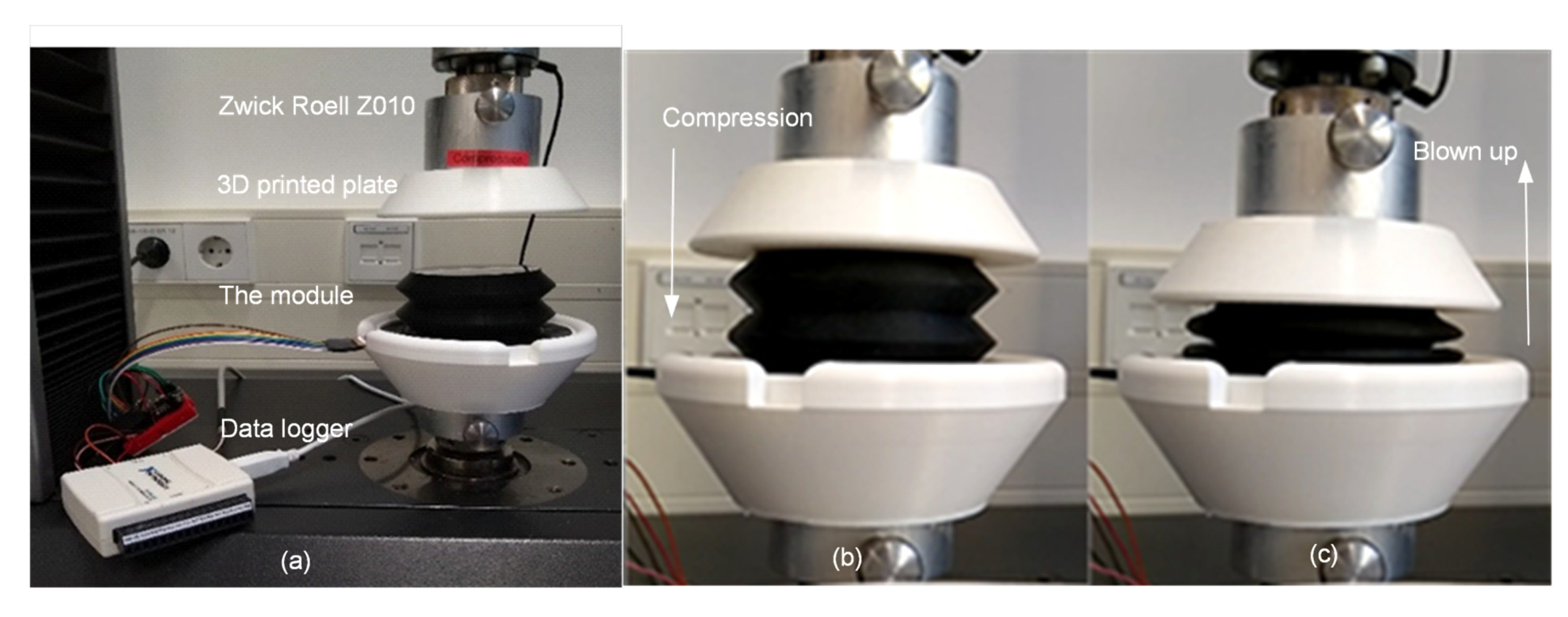
3.1. Actuation of the Bellow
- Action Inflation: In this case, both valves are closed, and the pneumatic pump is switched on. The pressure is measured by the on-board pressure sensor of the sensor breakout; the displacement of the actuation can be measured by the LED and the four phototransistors in the sensor breakout;
- Action Compression: Valve 1 is open and Valve 2 is closed, the displacement and the velocity of the deflation are measured by the LED and the four phototransistors in the sensor breakout; the force can be predicted with use of the pressure sensor;
- Action Balance: Maintaining a certain pressure is crucial for achieving the ideal pressure distribution of the seat cushion. In the use of the module, the force that applied on the top of the surface might differ while be used by different users, and for the same user, tiny movements, i.e., fidgeting, might also lead to changes in the force, which subsequently leads to changes of the shape of the bellow. To maintain the ideal pressure distribution, the dynamic balance is achieved by opening only valve 2 and switching on/off the pneumatic pump based on the measured pressure. Meanwhile, as the material of the bellow is soft silicon, the shape of the bellow changes with the changes of the force applied on the top. In this case, the displacement of the top surface is monitored by the four phototransistors measuring the reflected light of the LED.
3.2. Data-Driven Approach
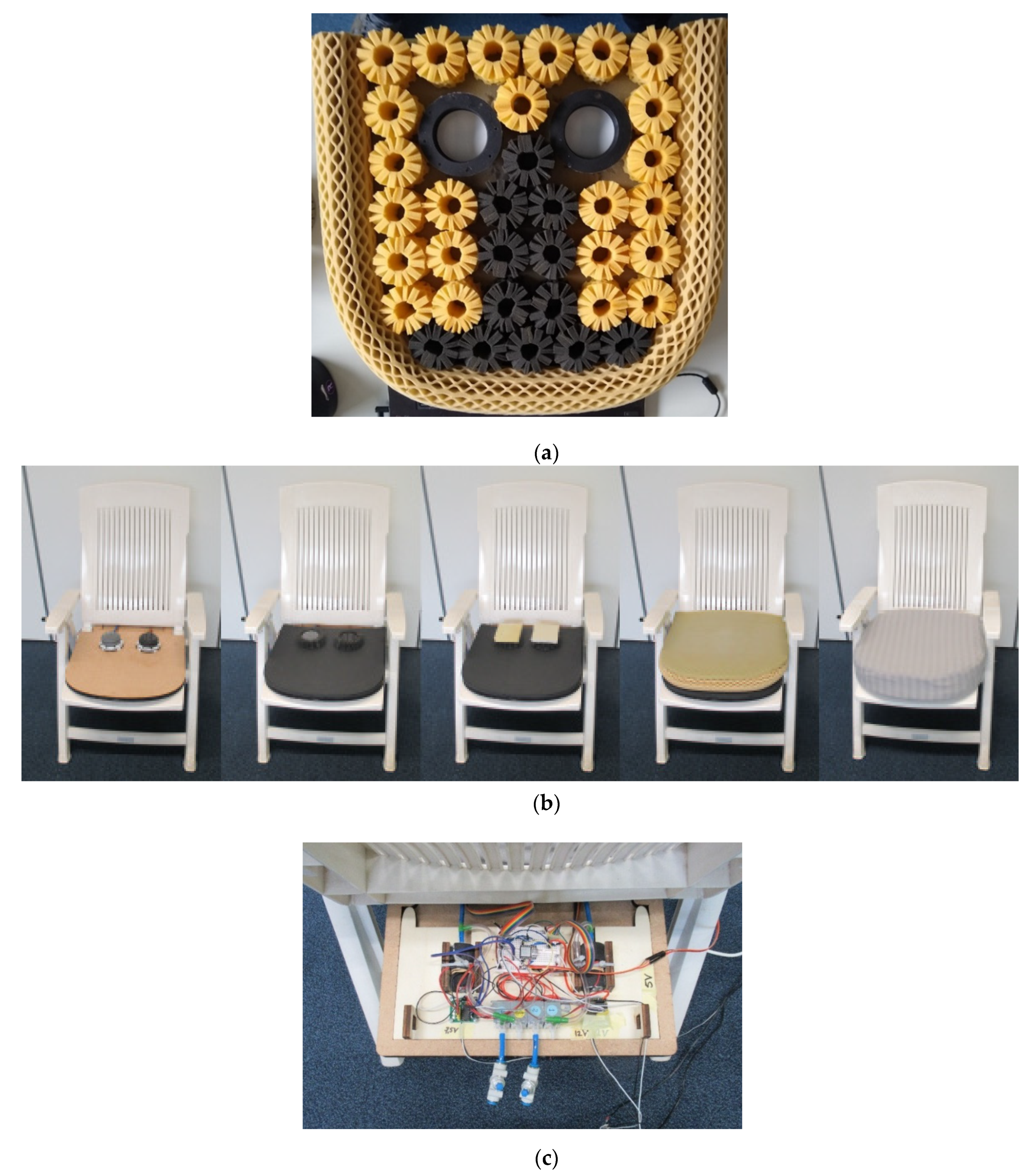
4. Embedding the Module in the Chair
- (1)
- Neutral mode, in which all valves are opened so the modules function similarly to the surrounding foam springs;
- (2)
- Blown-up mode, where the module is filled with air and all valves are closed when the subject sits down. This mode creates more pressure on the sitting bones than sitting down in neutral mode because the module cannot be deflated;
- (3)
- Pulsating mode, which starts in neutral mode and inflates and deflates slowly several times (pulsating). The pulsating mode is programmed to smoothly add and subtract 50 N of pressure per module on top of the neutral level (the force that exists when the user is sitting down in the chair without actuation) in a sinus wave fashion over the course of 20 s;
- (4)
- Self-chosen mode, which allows the subject to regulate the pressure added by the modules (0–75 N) by turning a knob. The subject is asked to find the most comfortable position by experimenting with pressure control. The added force at that moment and the neutral force are documented by the researcher.
5. Experiment
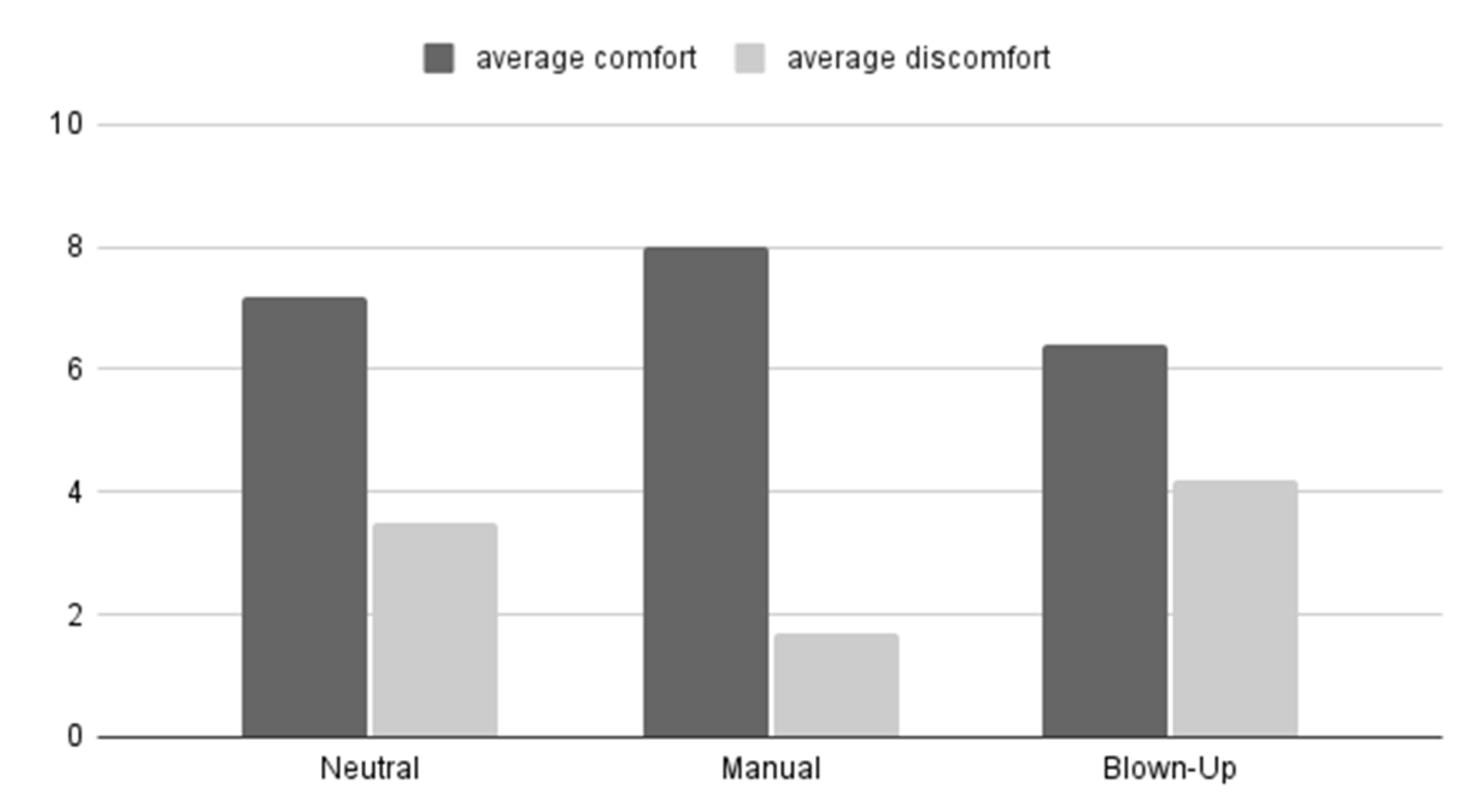
5.1. Comfort Ratings
5.2. Area of (Dis)Comfort
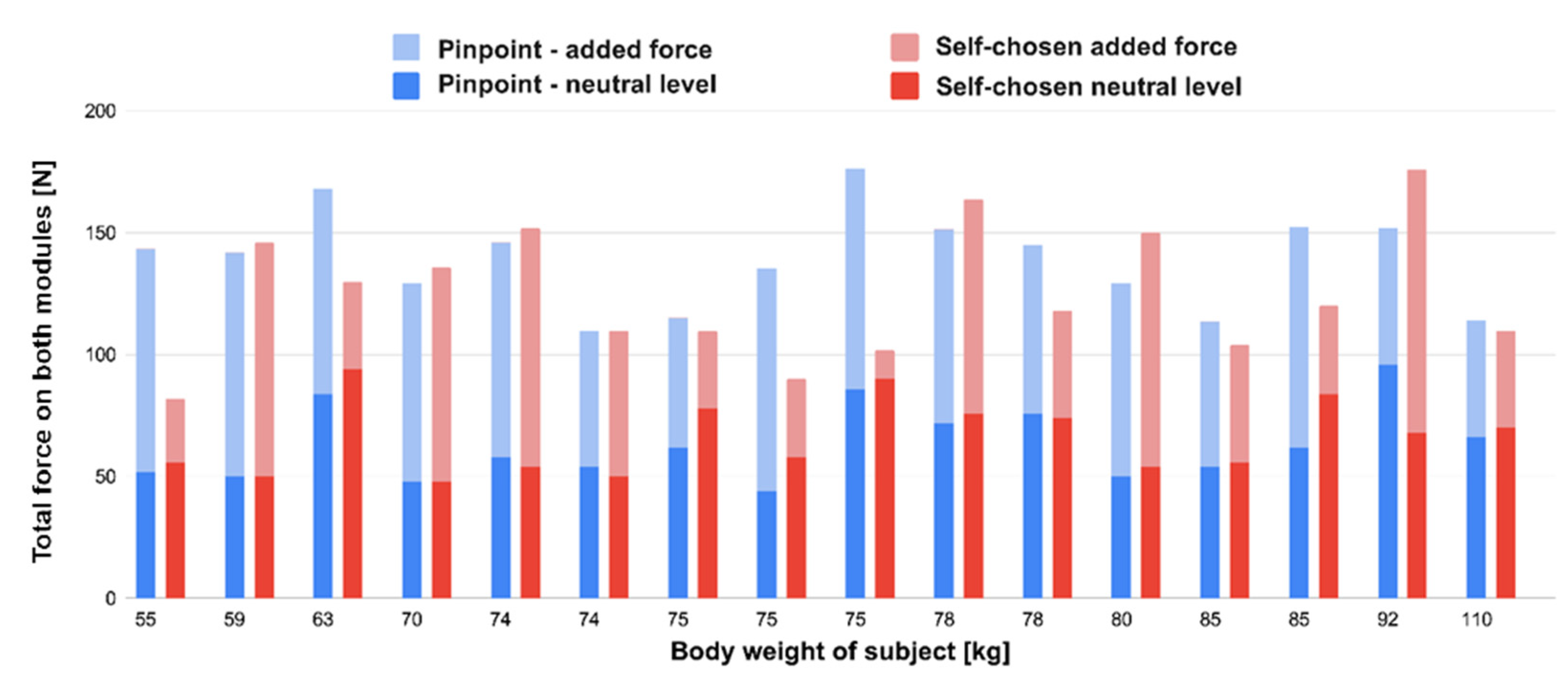
5.3. Most Comfortable Pressure
5.4. Actuation Experience
5.5. Perceived Function of the Modules
6. Discussion
6.1. The Module
6.2. Implications for Seat Design
6.3. Limitations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sammonds, G.M.; Fray, M.; Mansfield, N.J. Effect of long term driving on driver discomfort and its relationship with seat fidgets and movements (SFMs). Appl. Ergon. 2017, 58, 119–127. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kilincsoy, U. Digitalization of Posture-Based Seat Design: Developing Car Interiors by Involving User Demands and Activities; Delft University of Technology: Delft, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Yao, X.; He, Y.; Hessenberger, N.; Buso, A.; Song, Y.; Vink, P. Posture detection using pressure distribution in an aircraft seat: Bottom is better than top. Appl. Ergon. 2022. [Google Scholar]
- SENSIMAT. SENSIMAT for Wheelchairs. 2021. Available online: https://www.sensimatsystems.com/ (accessed on 1 March 2022).
- van Veen, S.; Orlinskiy, V.; Franz, M.; Vink, P. Investigating Car Passenger Well-Being Related to a Seat Imposing Continuous Posture Variation. J. Ergon. 2015, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- Zenk, R. Objektivierung des Sitzkomforts und Seine Automatische Anpassung; utzverlag GmbH: München, Germany, 2009; ISBN 10:3831608709. [Google Scholar]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Noro, K.; Naruse, T.; Lueder, R.; Nao-i, N.; Kozawa, M. Application of Zen sitting principles to microscopic surgery seating. Appl. Ergon. 2012, 43, 308–319. [Google Scholar] [CrossRef] [PubMed]
- Xie, M.; Zhu, M.; Yang, Z.; Okada, S.; Kawamura, S. Flexible self-powered multifunctional sensor for stiffness-tunable soft robotic gripper by multimaterial 3D printing. Nano Energy 2021, 79, 105438. [Google Scholar] [CrossRef]
- Robertson, M.A.; Murakami, M.; Felt, W.; Paik, J. A Compact Modular Soft Surface with Reconfigurable Shape and Stiffness. IEEE/ASME Trans. Mechatron. 2019, 24, 16–24. [Google Scholar] [CrossRef]
- Scharff, R.B.N.; Doornbusch, R.M.; Doubrovski, E.L.; Wu, J.; Geraedts, J.M.P.; Wang, C.C.L. Color-Based Proprioception of Soft Actuators Interacting with Objects. IEEE/ASME Trans. Mechatron. 2019, 24, 1964–1973. [Google Scholar] [CrossRef] [Green Version]
- Scharff, R.B.N.; Fang, G.; Tian, Y.; Wu, J.; Geraedts, J.M.P.; Wang, C.C.L. Sensing and Reconstruction of 3-D Deformation on Pneumatic Soft Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 1877–1885. [Google Scholar] [CrossRef]
- Felt, W.; Telleria, M.J.; Allen, T.F.; Hein, G.; Pompa, J.B.; Albert, K.; Remy, C.D. An inductance-based sensing system for bellows-driven continuum joints in soft robots. Auton. Robot. 2019, 43, 435–448. [Google Scholar] [CrossRef] [PubMed]
- Buso, A.; Scharff, R.B.N.; Doubrovski, E.L.; Wu, J.; Wang, C.C.L.; Vink, P. Soft Robotic Module for Sensing and Controlling Contact Force. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 70–75. [Google Scholar] [CrossRef]
- Pynt, J.; Higgs, J.; Mackey, M. Seeking the optimal posture of the seated lumbar spine. Physiother. Theory Pract. 2001, 17, 5–21. [Google Scholar] [CrossRef]
- Mergl, C.; Klendauer, M.; Mangen, C.; Bubb, H. Predicting Long Term Riding Comfort in Cars by Contact Forces between Human and Seat; SAE International 2005 Digital Human Modeling for Design and Engineering Symposium: Iowa City, IA, USA, 2005. [Google Scholar] [CrossRef]
- Anjani, S.; Kühne, M.; Naddeo, A.; Frohriep, S.; Mansfield, N.; Song, Y.; Vink, P. PCQ: Preferred Comfort Questionnaires for product design. Work 2021, 68 (Suppl. S1), S19–S28. [Google Scholar] [CrossRef] [PubMed]
- Hartung, J. Objektivierung des Statischen Sitzkomforts auf Fahrzeugsitzen Durch die Kontaktkräfte Zwischen Mensch und Sitz. Ph.D. Dissertation, Lehrstuhl für Ergonomie, Technische Universität München, München, Germany, 2005. [Google Scholar]
- Zenk, R.; Franz, M.; Bubb, H.; Vink, P. Technical note: Spine loading in automotive seating. Appl. Ergon. 2012, 43, 290–295. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Fang, G.; Dai, C.; Verlinden, J.; Wu, J.; Whiting, E.; Wang, C. Thermal-Comfort Design of Personalized Casts. In Proceedings of the 30th Annual ACM Symposium on User Interface Software and Technology, Québec City, Canada, 22–25 October 2017; pp. 243–254, Association for Computing Machinery (ACM). [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roozendaal, T.; Verwaal, M.; Buso, A.; Scharff, R.B.N.; Song, Y.; Vink, P. Development of a Soft Robotics Module for Active Control of Sitting Comfort. Micromachines 2022, 13, 477. https://doi.org/10.3390/mi13030477
Roozendaal T, Verwaal M, Buso A, Scharff RBN, Song Y, Vink P. Development of a Soft Robotics Module for Active Control of Sitting Comfort. Micromachines. 2022; 13(3):477. https://doi.org/10.3390/mi13030477
Chicago/Turabian StyleRoozendaal, Tjark, Martin Verwaal, Alice Buso, Rob B. N. Scharff, Yu Song, and Peter Vink. 2022. "Development of a Soft Robotics Module for Active Control of Sitting Comfort" Micromachines 13, no. 3: 477. https://doi.org/10.3390/mi13030477