
Design Consideration Investigation of Soft-Valve Pipe


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design Consideration of Soft-Valve Pipe
3. Pipe Configuration Investigation of Soft Valve
4. Pipe Parameter Investigation of Soft Valve
5. Development and Application of the Three-Way Soft Valve
5.1. Development of the Three-Way Soft Valve
5.2. Application of the Three-Way Soft Valve
6. Conclusions
- (1)
- Of the five pipe configurations, shape 1 and shape 2 have a better linear relationship between breakthrough pressure and compression height. Compared to shape 2, shape 1 also exhibits a simpler and more stable structure.
- (2)
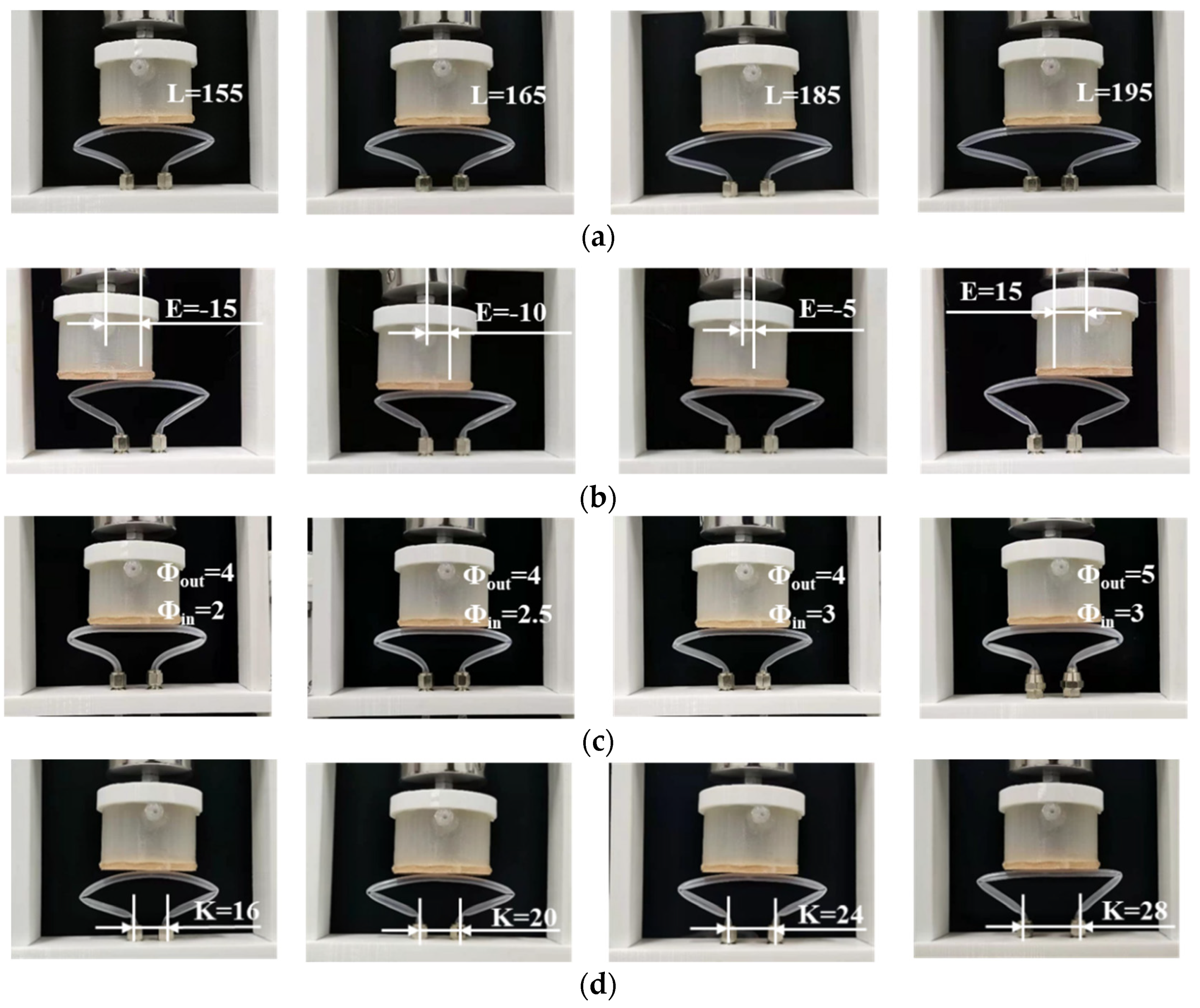
- The breakthrough pressure of the silicone pipe in the soft valve can be designed by selecting the appropriate values of the pipe length, pipe eccentricity, ratio of outer diameter to inner diameter and input–output ports space.
- (3)
- By virtue of reasonable pipe configuration and pipe parameter, the developed three-way soft valve shows good air circuit controllability and can be applied to control the states of a pneu-net gripper and a corrugated crawling robot.
7. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef] [PubMed]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actu-ators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shintake, J.; Rosset, S.; Schubert, B.E.; Floreano, D.; Shea, H. Versatile Soft Grippers with Intrinsic Electroadhesion Based on Multifunctional Polymer Actuators. Adv. Mater. 2016, 28, 231–238. [Google Scholar] [CrossRef]
- Wang, D.; Wu, X.J.; Zhang, J.H.; Du, Y.Y. A Pneumatic Novel Combined Soft Robotic Gripper with High Load Capacity and Large Grasping Range. Actuators 2022, 11, 3. [Google Scholar] [CrossRef]
- Belding, L.; Baytekin, B.; Baytekin, H.T.; Rothemund, P.J.M.; Verma, M.S.; Nemiroski, A.; Sameoto, D.; Grzybowski, B.A.; Whitesides, G.M. Slit Tubes for Semisoft Pneumatic Actuators. Adv. Mater. 2018, 30, 1704446. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Galley, A.; Knopf, G.K.; Kashkoush, M. Pneumatic Hyperelastic Actuators for Grasping Curved Organic Objects. Actuators 2019, 8, 76. [Google Scholar] [CrossRef] [Green Version]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Chen, L.; Chen, C.; Wang, Z.; Ye, X.; Liu, Y.; Wu, X. A Novel Lightweight Wearable Soft Exosuit for Reducing the Metabolic Rate and Muscle Fatigue. Biosensors 2021, 11, 215. [Google Scholar] [CrossRef]
- Kim, B.; Jeong, U.; Kang, B.B.; Cho, K.-J. Slider-Tendon Linear Actuator with Under-Actuation and Fast-Connection for Soft Wearable Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 2932–2943. [Google Scholar] [CrossRef]
- Roozendaal, T.; Verwaal, M.; Buso, A.; Scharff, R.B.N.; Song, Y.; Vink, P. Development of a Soft Robotics Module for Active Control of Sitting Comfort. Micromachines 2022, 13, 477. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-powered soft robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Tolley, M.T.; Shepherd, R.F.; Galloway, K.C.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Franco, E.; Garriga-Casanovas, A.; Tang, J.; Baena, F.R.Y.; Astolfi, A. Adaptive Energy Shaping Control of a Class of Nonlinear Soft Continuum Manipulators. IEEE/ASME Trans. Mechatron. 2021, 27, 280–291. [Google Scholar] [CrossRef]
- Ji, M.; Li, Q.; Cho, I.H.; Kim, J. Rapid Design and Analysis of Microtube Pneumatic Actuators Using Line-Segment and Multi-Segment Euler–Bernoulli Beam Models. Micromachines 2019, 10, 780. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, X.; Ma, C.; Yan, S.; Inglis, D.; Feng, S. A Review of Capillary Pressure Control Valves in Microfluidics. Biosensors 2021, 11, 405. [Google Scholar] [CrossRef]
- Miyaki, Y.; Tsukagoshi, H. Soft simple Compact Valve Inducing Self-Excited Vibration Aimed for Mobile Robots Unnecessary for Electricity. In Proceedings of the 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Auckland, New Zealand, 9–12 July 2018; pp. 670–675. [Google Scholar] [CrossRef]
- Luo, K.; Rothemund, P.; Whitesides, G.M.; Suo, Z. Soft kink valves. J. Mech. Phys. Solids 2019, 131, 230–239. [Google Scholar] [CrossRef]
- Rothemund, P.; Ainla, A.; Belding, L.; Preston, D.J.; Kurihara, S.; Suo, Z.; Whitesides, G.M. A soft, bistable valve for autono-mous control of soft actuators. Sci. Robot. 2018, 3, eaar7986. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preston, D.J.; Rothemund, P.; Jiang, H.J.; Nemitz, M.P.; Rawson, J.; Suo, Z.; Whitesides, G.M. Digital logic for soft devices. Proc. Natl. Acad. Sci. USA 2019, 116, 7750–7759. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Preston, D.J.; Jiang, H.J.; Sanchez, V.; Rothemund, P.; Rawson, J.; Nemitz, M.P.; Lee, W.-K.; Suo, Z.; Walsh, C.J.; Whitesides, G.M. A soft ring oscillator. Sci. Robot. 2019, 4, eaaw5496. [Google Scholar] [CrossRef] [PubMed]
- Kamimura, T.; Ohba, K.; Bando, K. Two-Dimensional Numerical Simulation and Experiment on Large Deformation of Collapsible Tube. JSME Int. J. Ser. C 2000, 43, 889–894. [Google Scholar] [CrossRef]
- Gent, A.N. Elastic instabilities in rubber. Int. J. Non-Linear Mech. 2005, 40, 165–175. [Google Scholar] [CrossRef]
- Luo, Y.N.; Ji, C.; Li, S.Z.; Gao, Z.K.; Liu, Y.J. Small Pneumatic Three-Way Soft Switch Valve. CN113007384B, 4 January 2022. [Google Scholar]
- Digumarti, K.M.; Conn, A.T.; Rossiter, J. Euglenoid-Inspired Giant Shape Change for Highly Deformable Soft Robots. IEEE Robot. Autom. Lett. 2017, 2, 2302–2307. [Google Scholar] [CrossRef] [Green Version]















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Luo, Y.; Ji, C.; Ren, Y.; Li, S. Design Consideration Investigation of Soft-Valve Pipe. Micromachines 2022, 13, 568. https://doi.org/10.3390/mi13040568
Yang X, Luo Y, Ji C, Ren Y, Li S. Design Consideration Investigation of Soft-Valve Pipe. Micromachines. 2022; 13(4):568. https://doi.org/10.3390/mi13040568
Chicago/Turabian StyleYang, Xu, Yiniu Luo, Chen Ji, Yugang Ren, and Shizhen Li. 2022. "Design Consideration Investigation of Soft-Valve Pipe" Micromachines 13, no. 4: 568. https://doi.org/10.3390/mi13040568