
An Optical Measuring Transducer for a Micro-Opto-Electro-Mechanical Micro-g Accelerometer Based on the Optical Tunneling Effect

 , ,
, ,
Abstract
:1. Introduction
2. Micromachined Sensing Chip
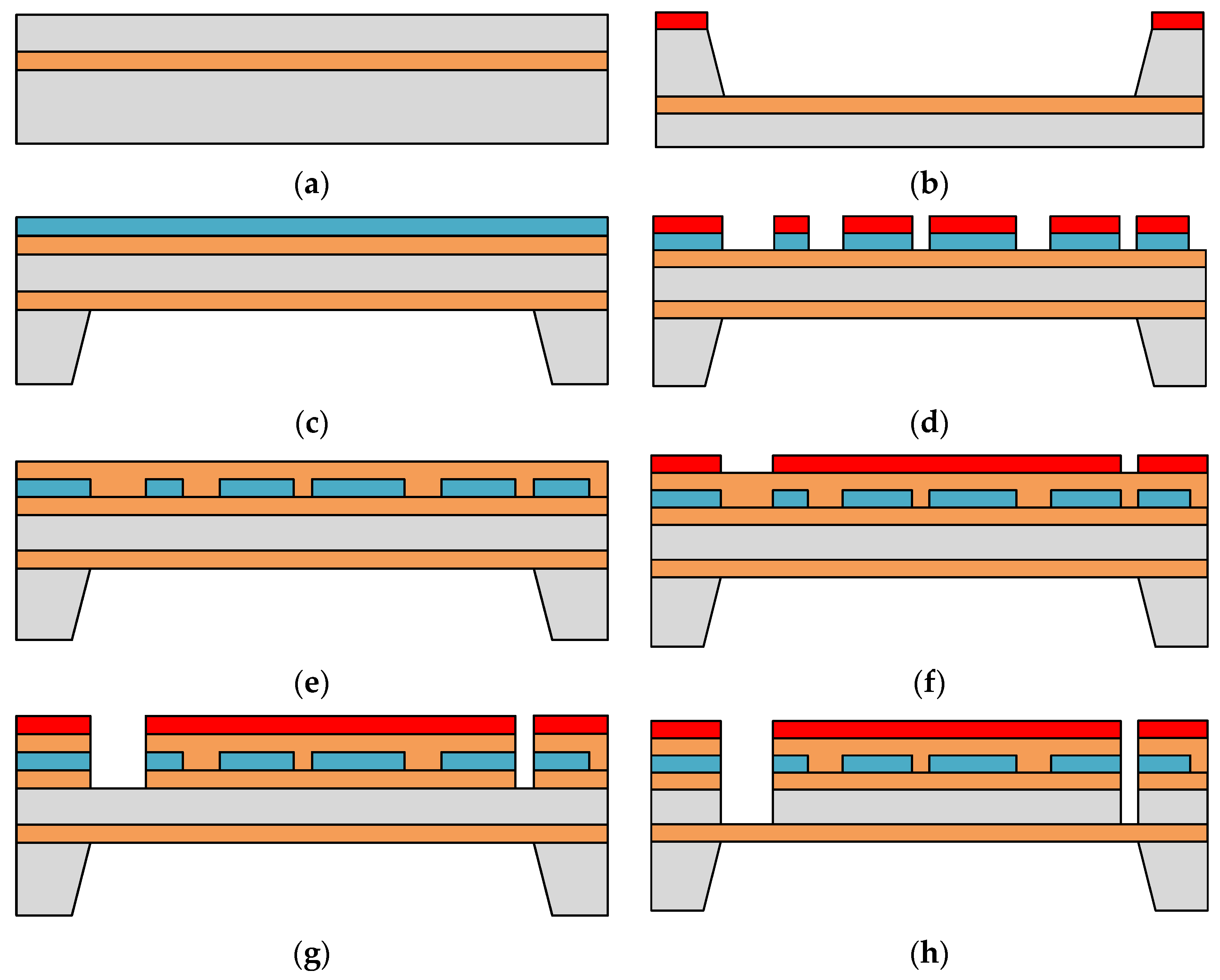
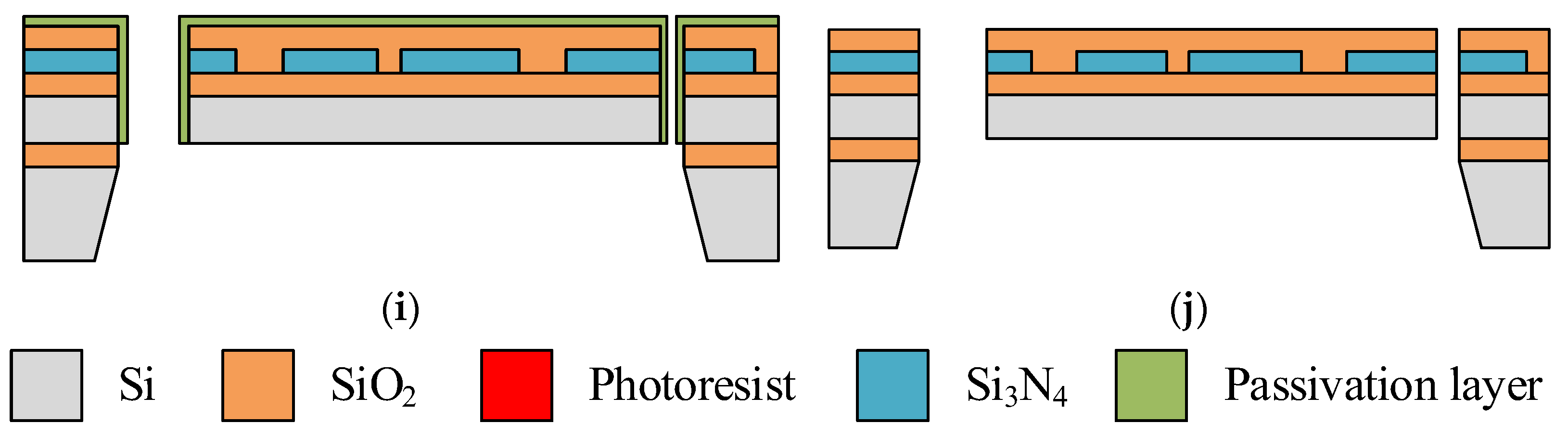
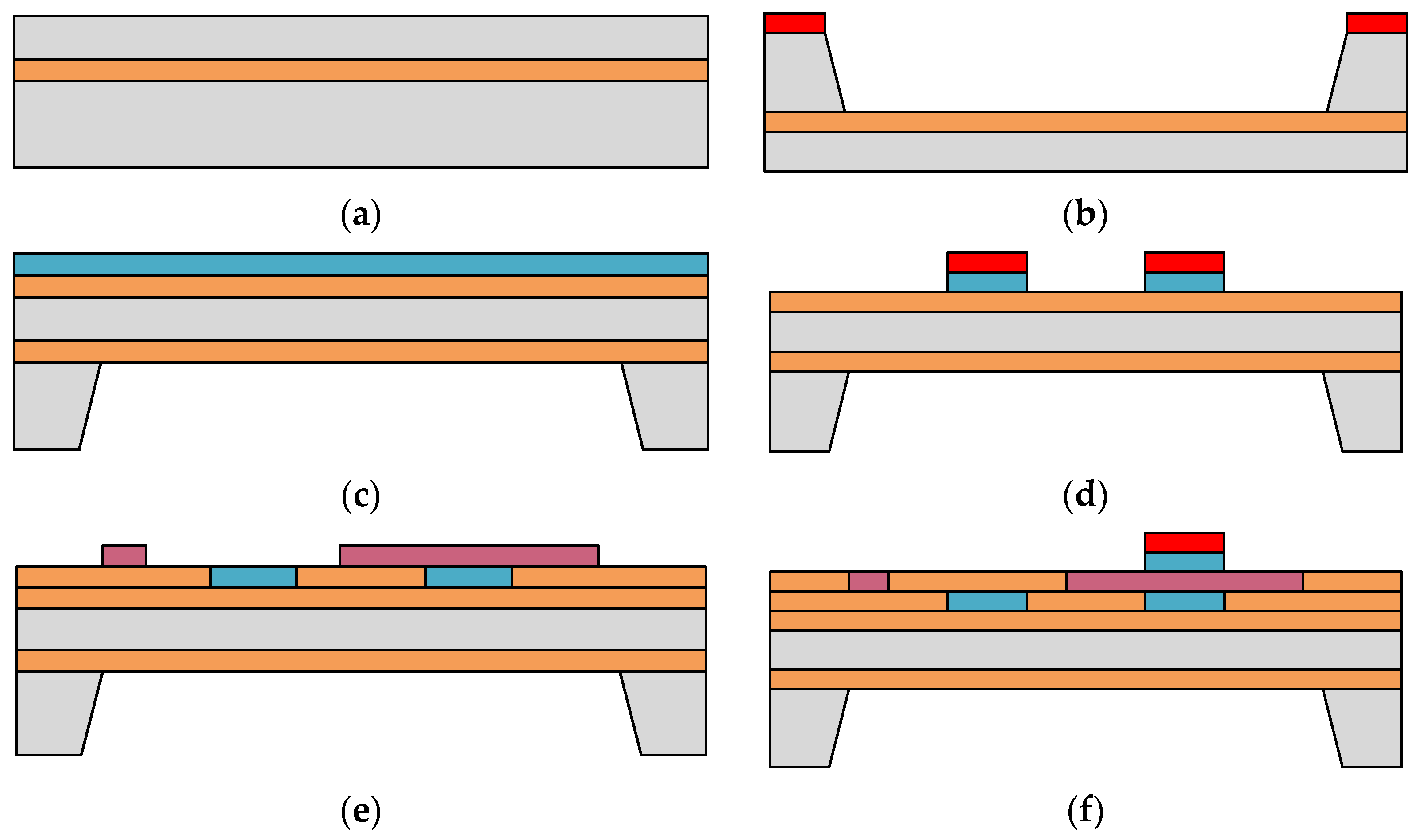
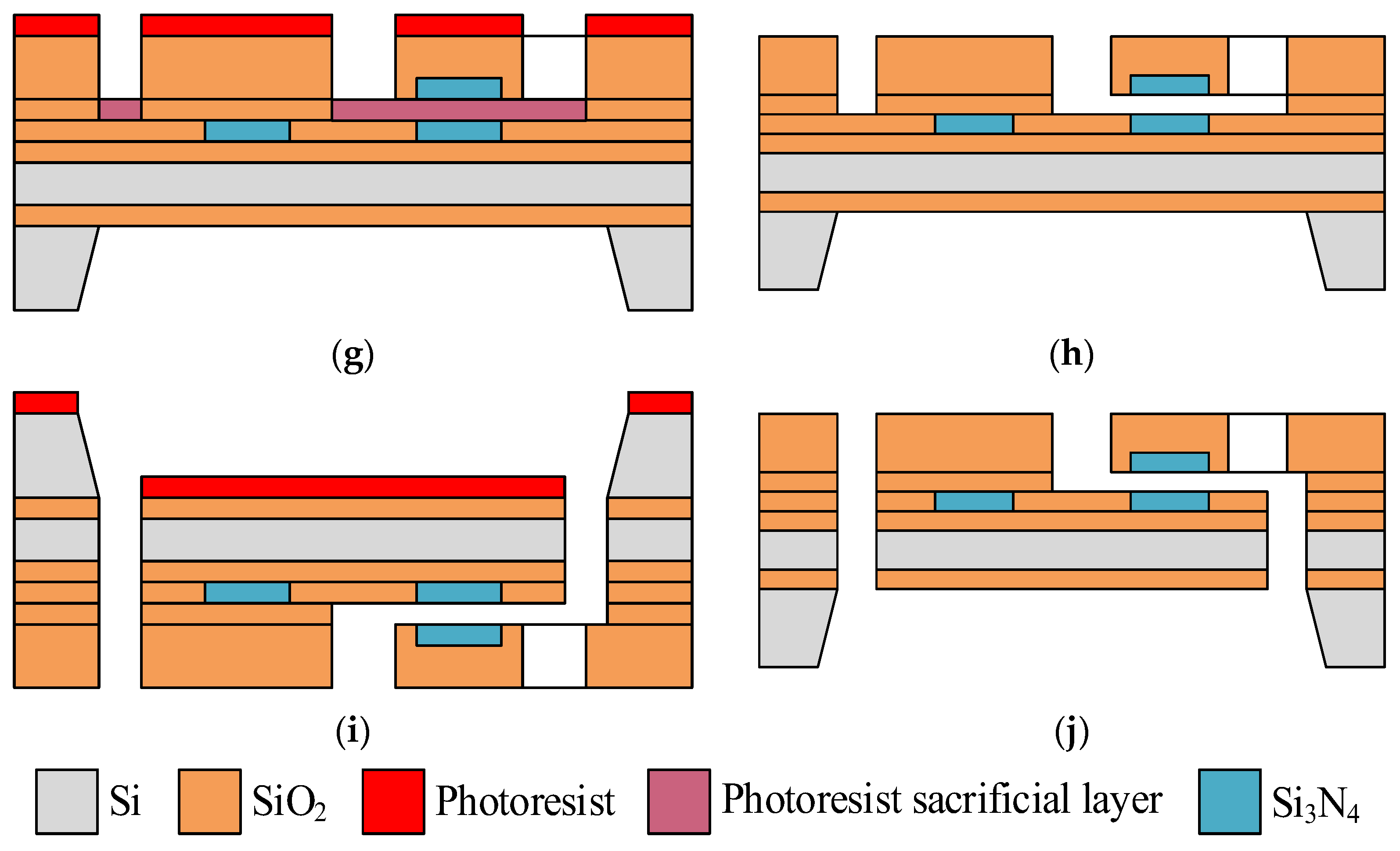
2.1. Sensor Fabrication
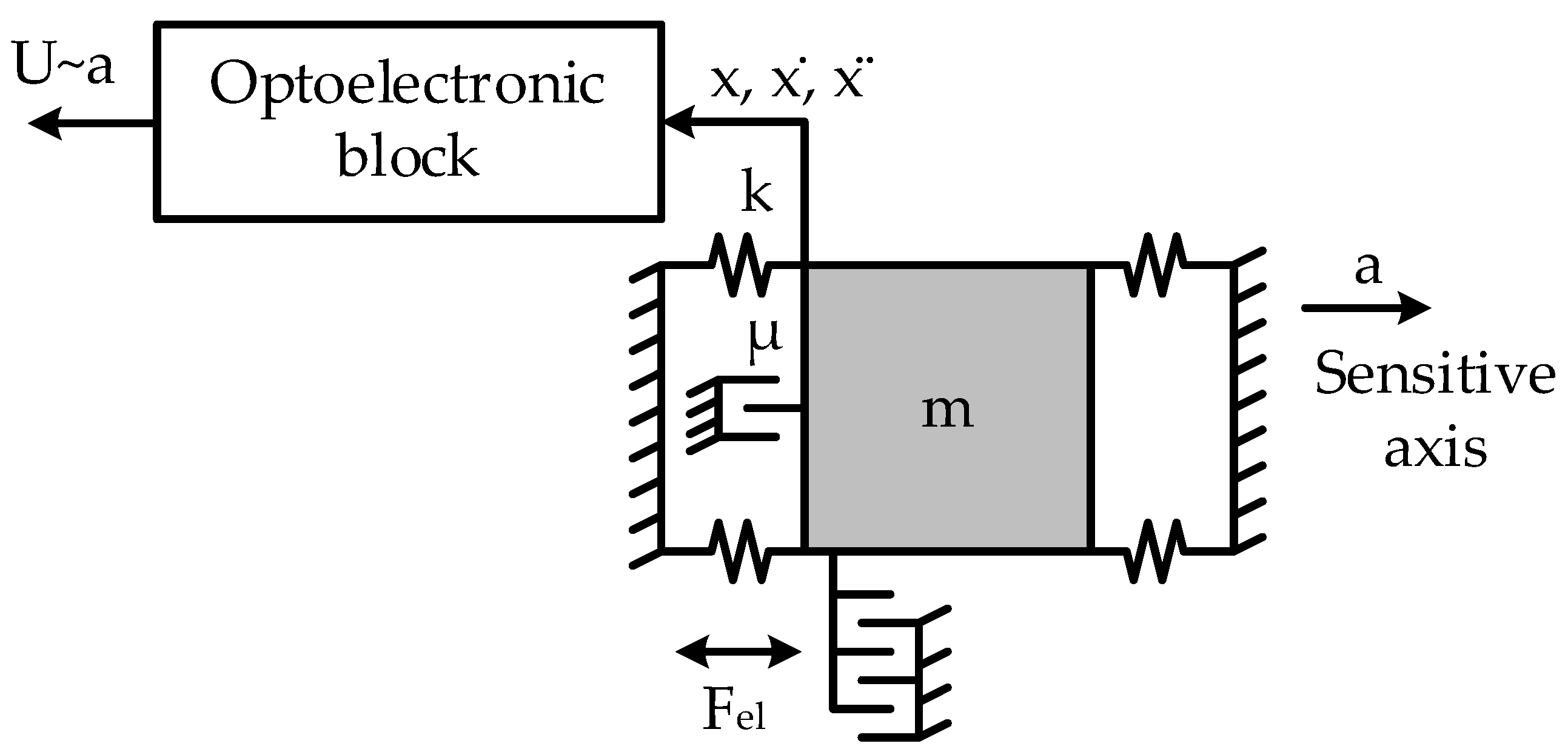
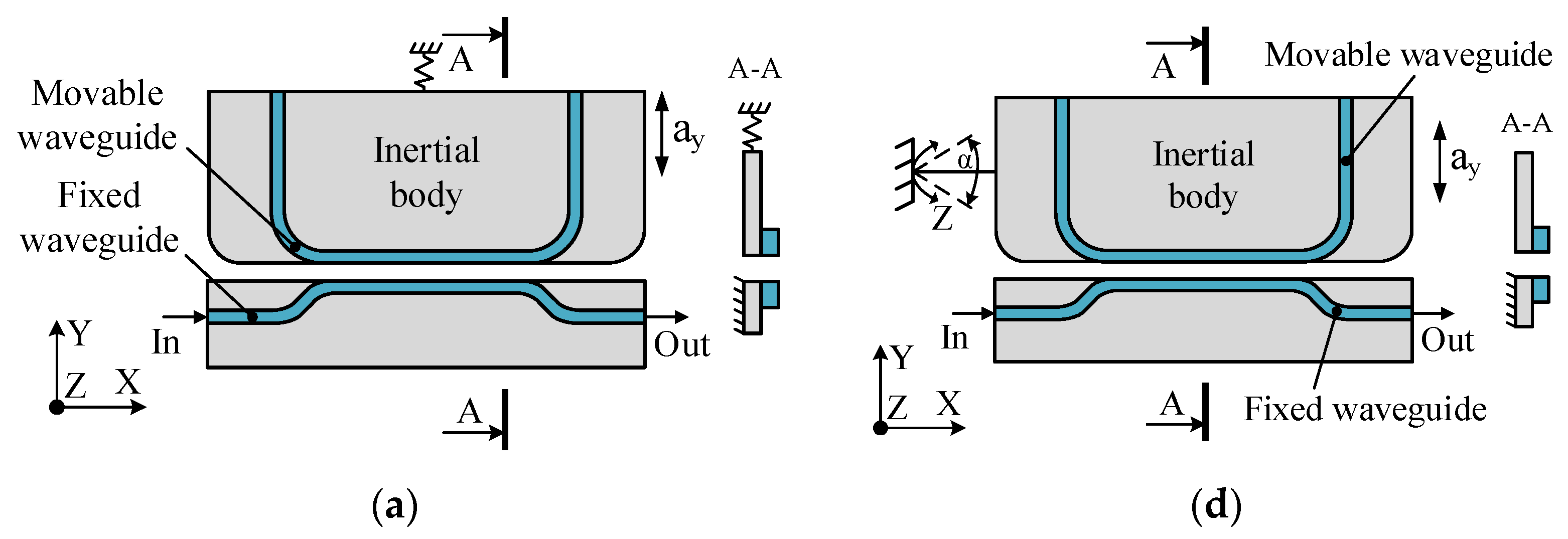
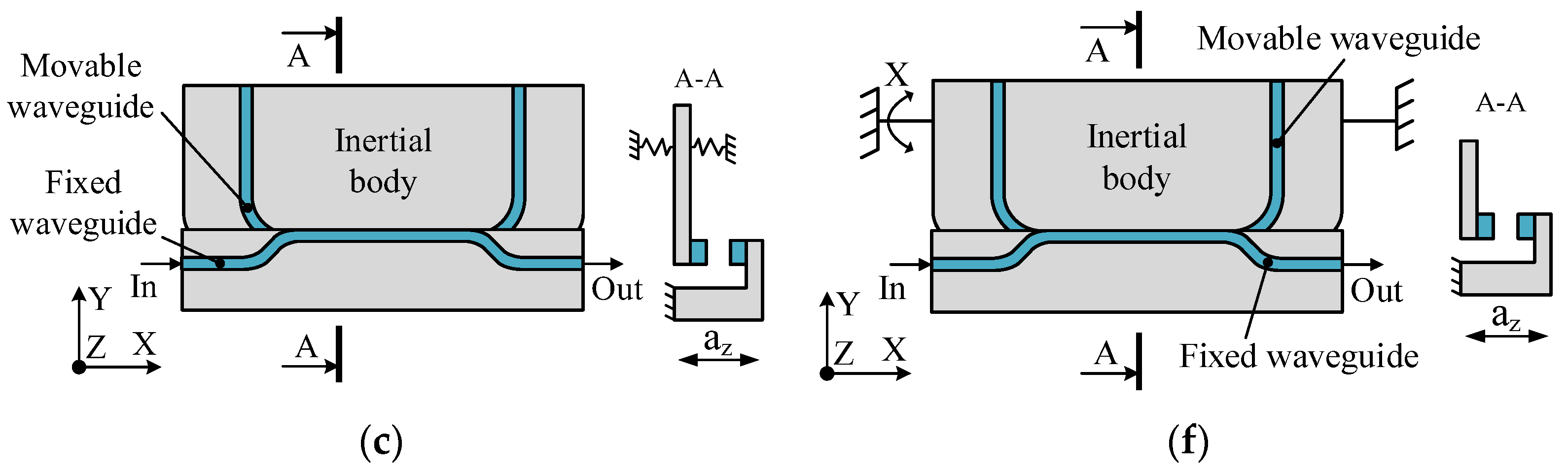
2.2. Functional Schemes of Accelerometer with Single-Plane Waveguides
2.3. Functional Schemes of Accelerometer with Different-Plane Waveguides
3. Optical Measuring Transducer
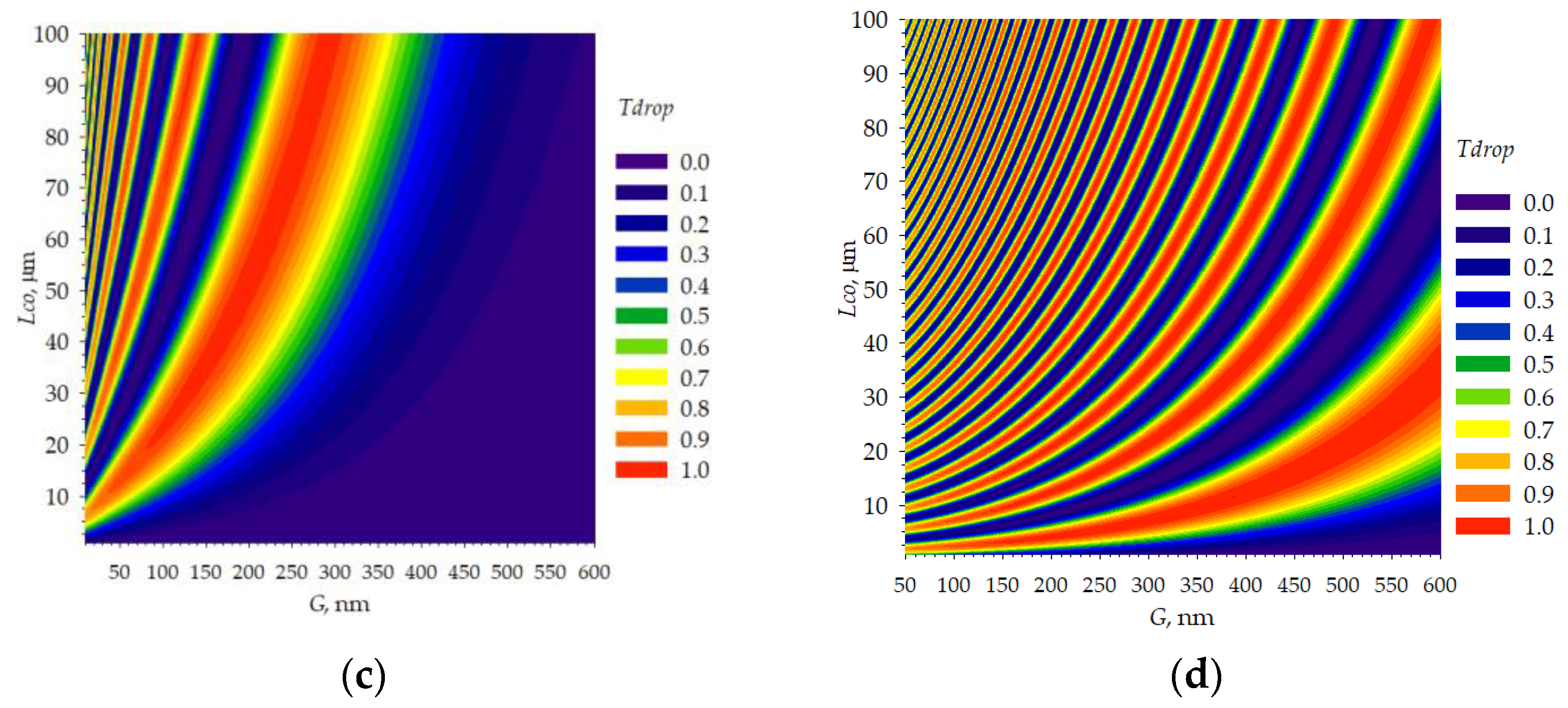
3.1. Coupling Length
3.2. Characteristics of OMT
3.2.1. Changing the Coupling Length
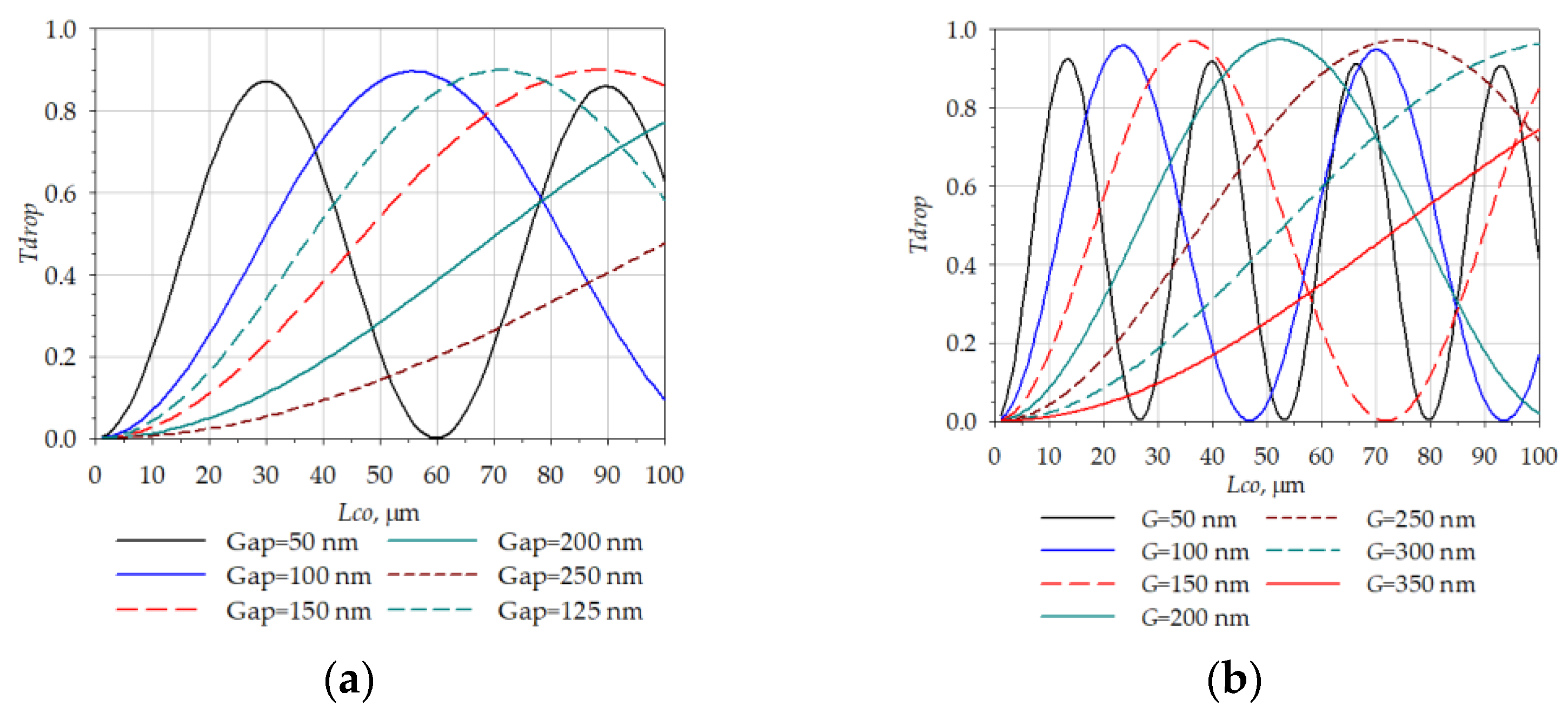
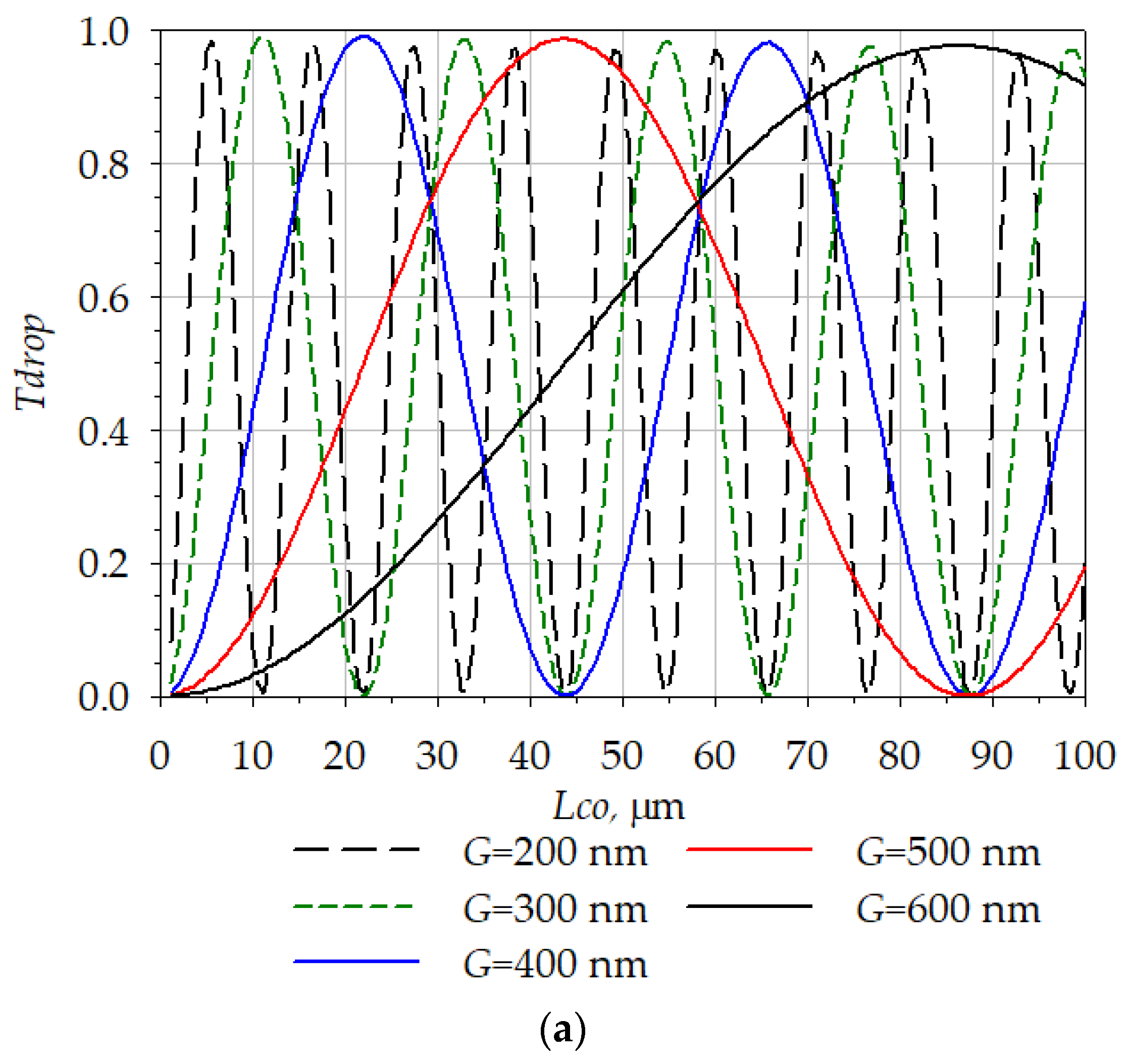
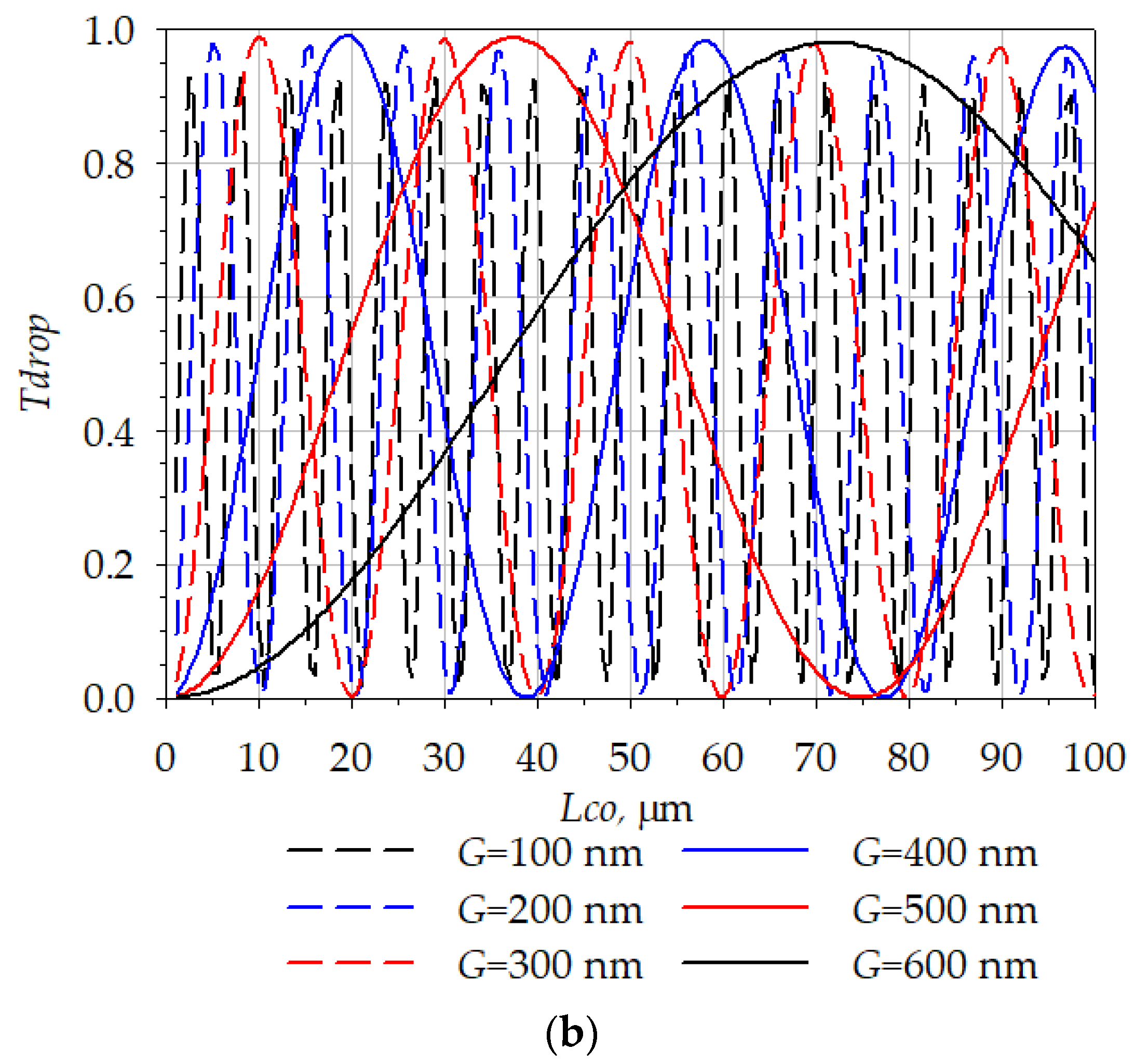
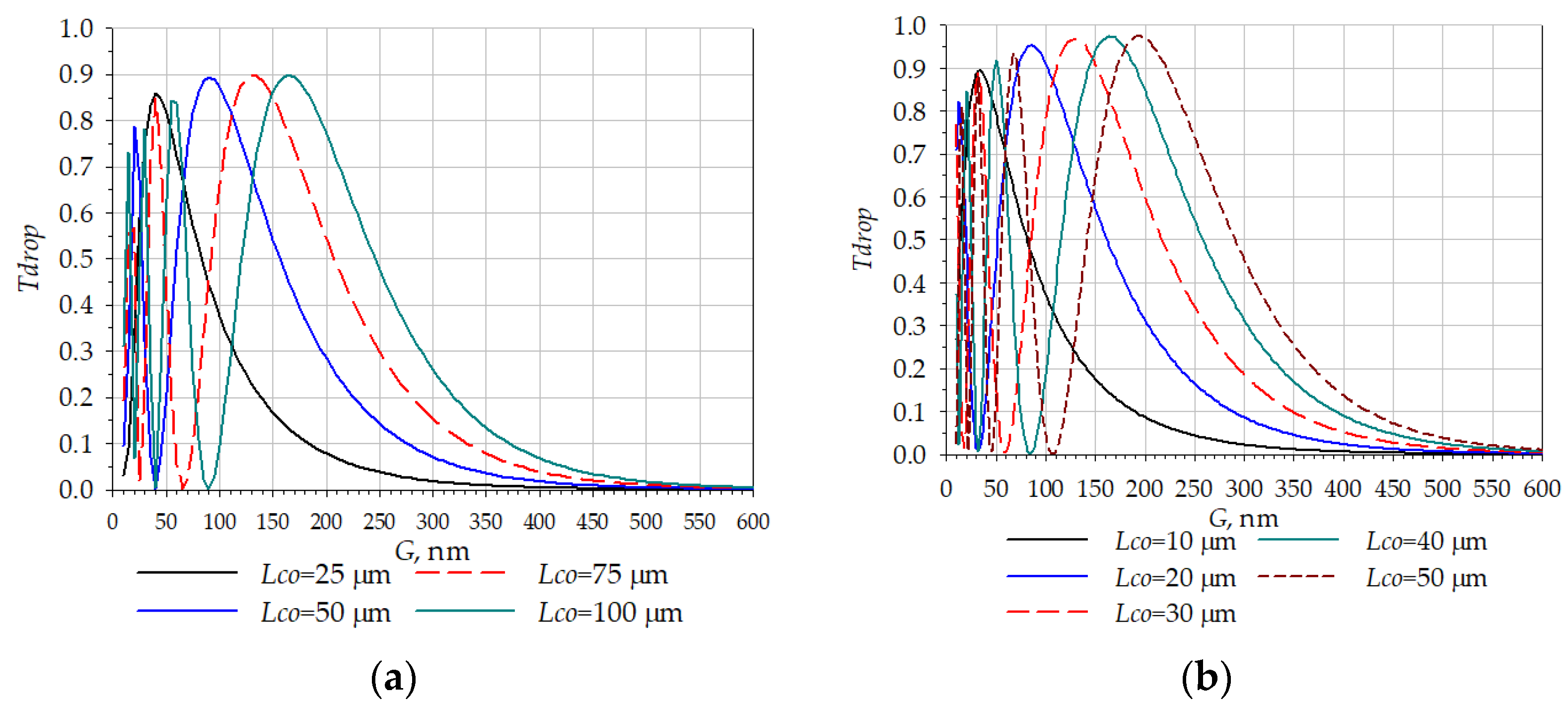
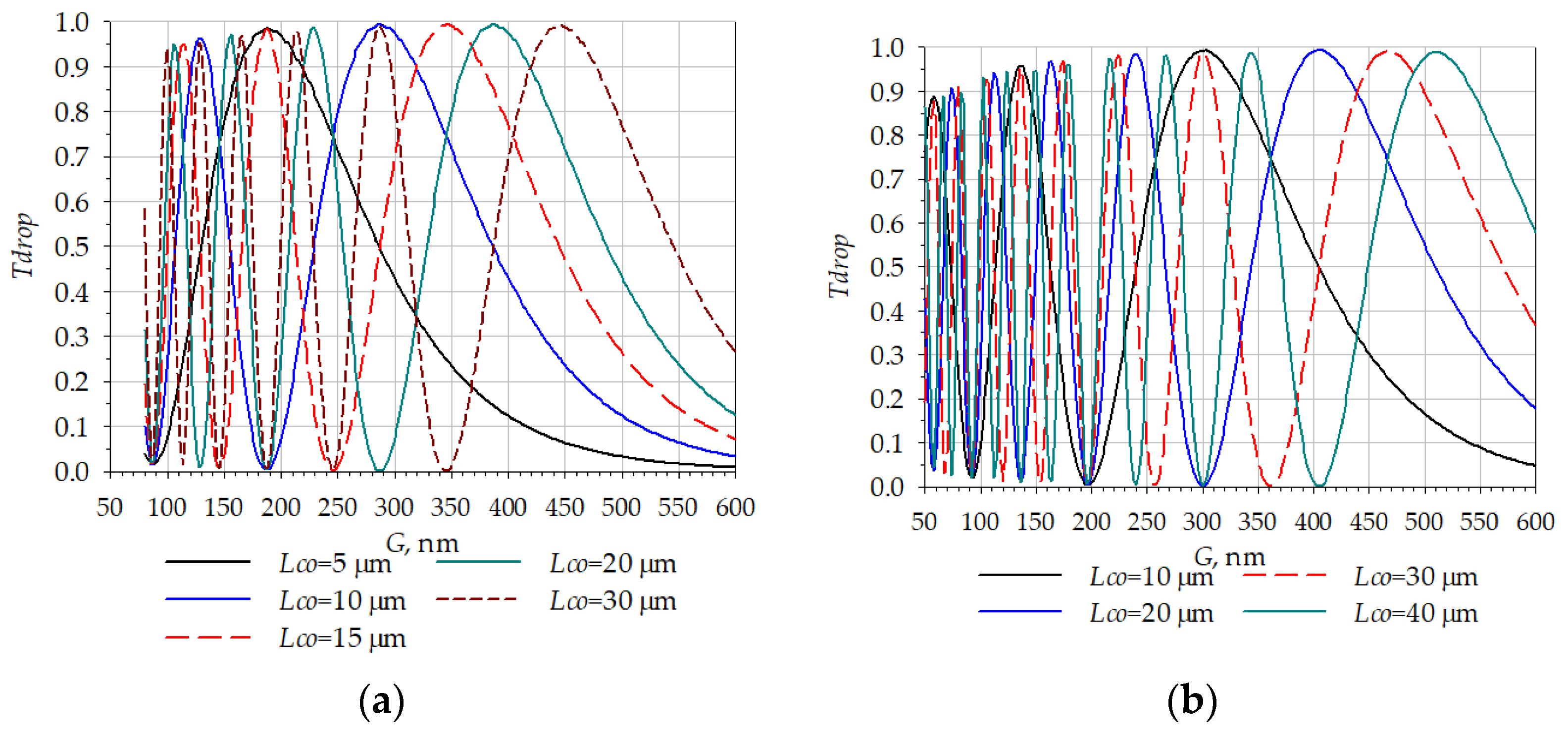
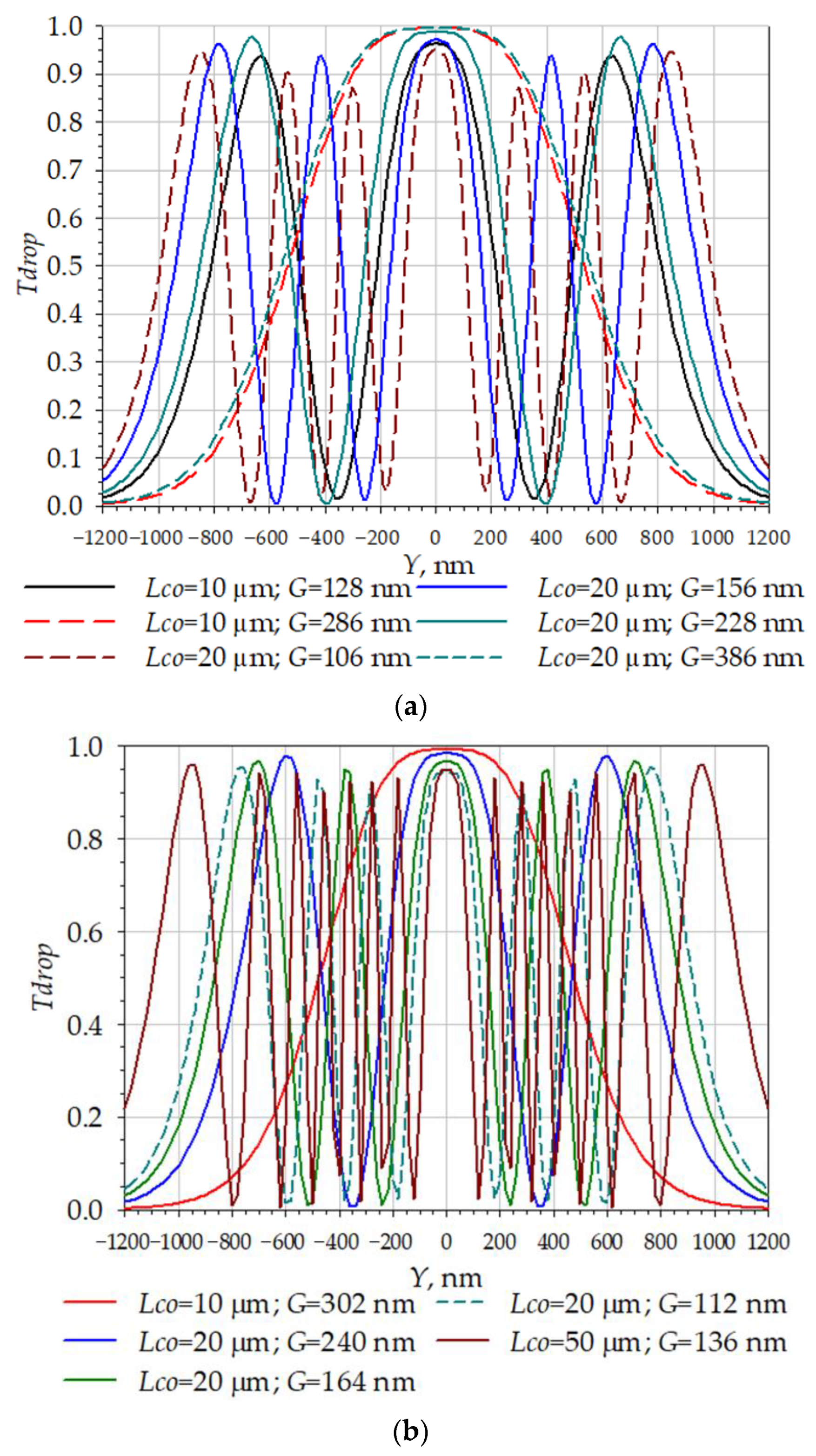
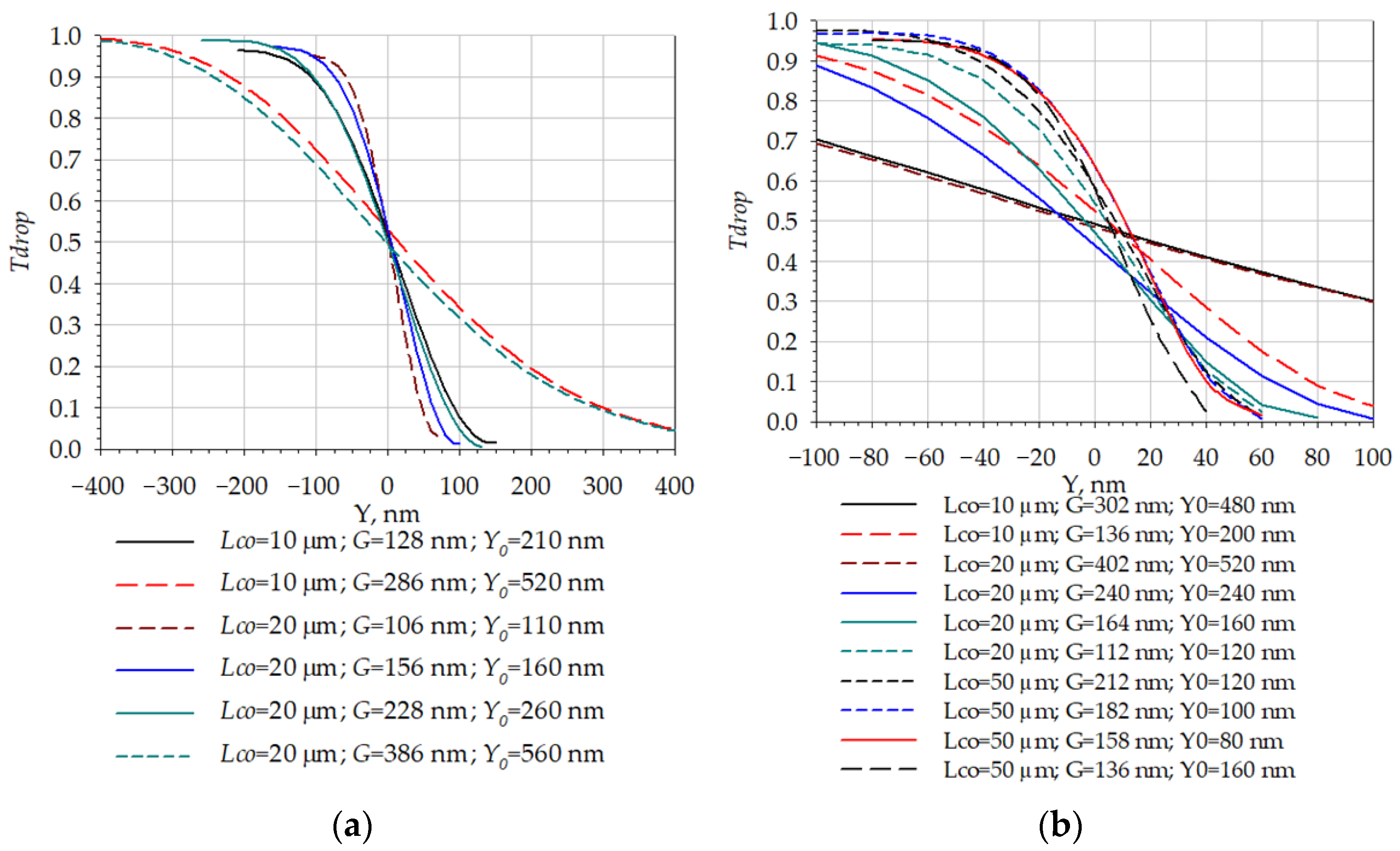
3.2.2. Changing the Gap
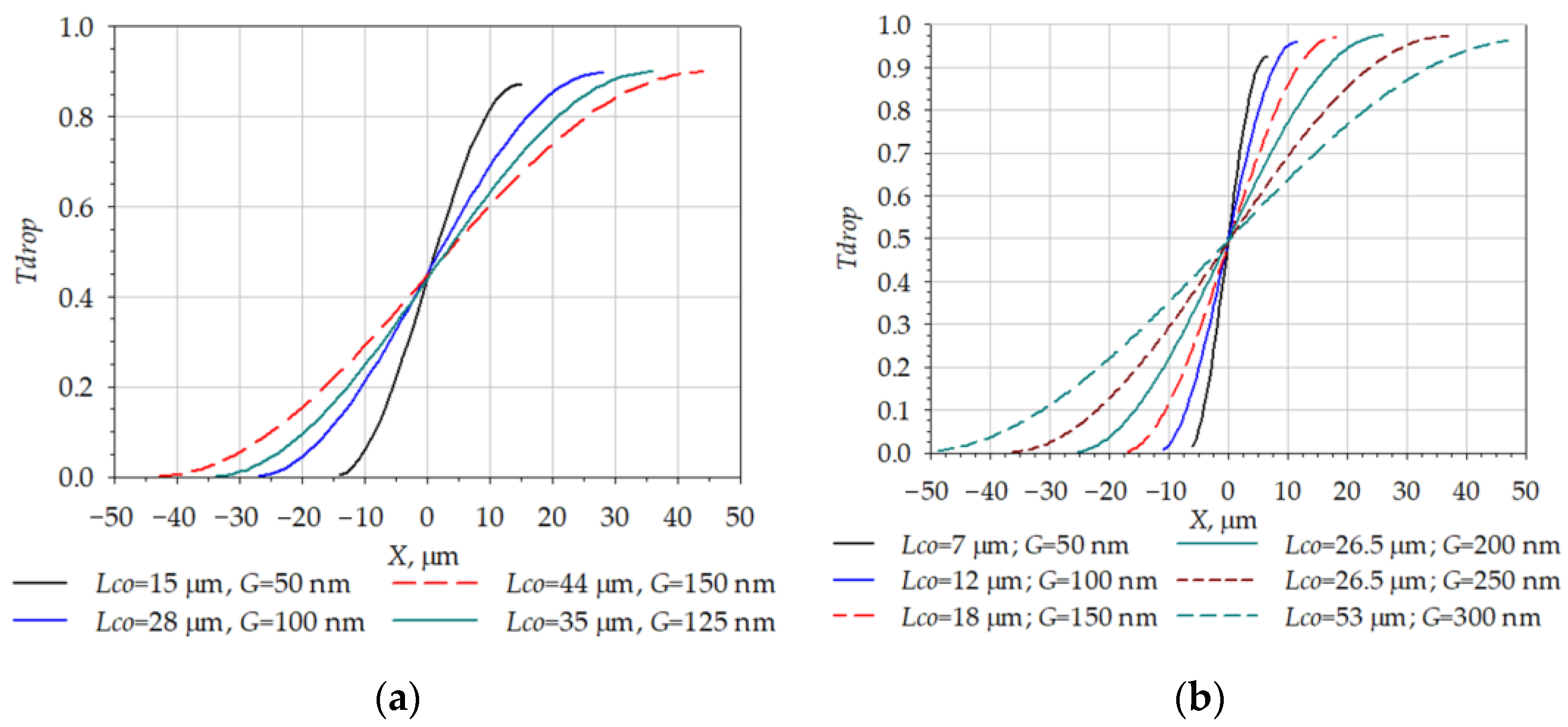
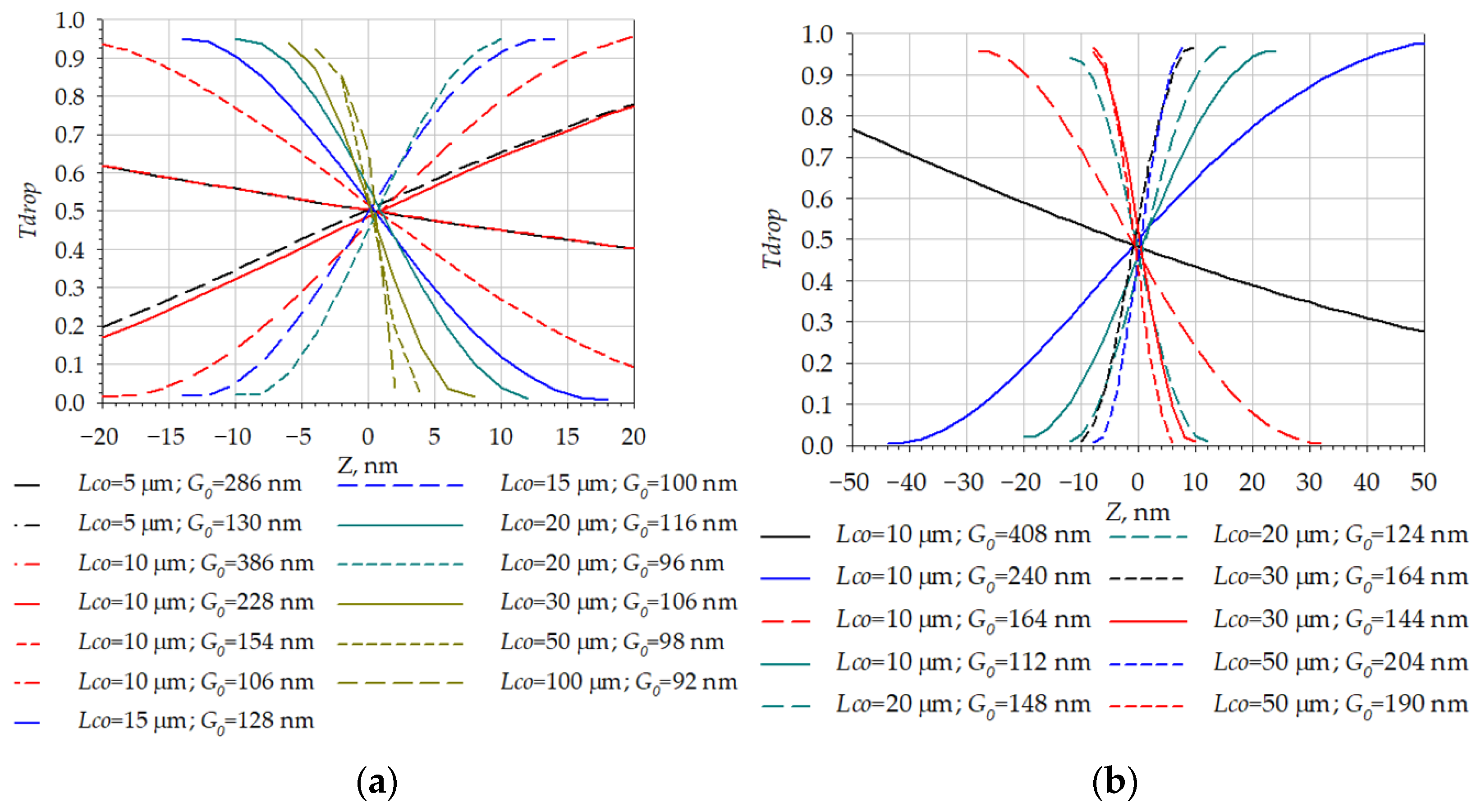
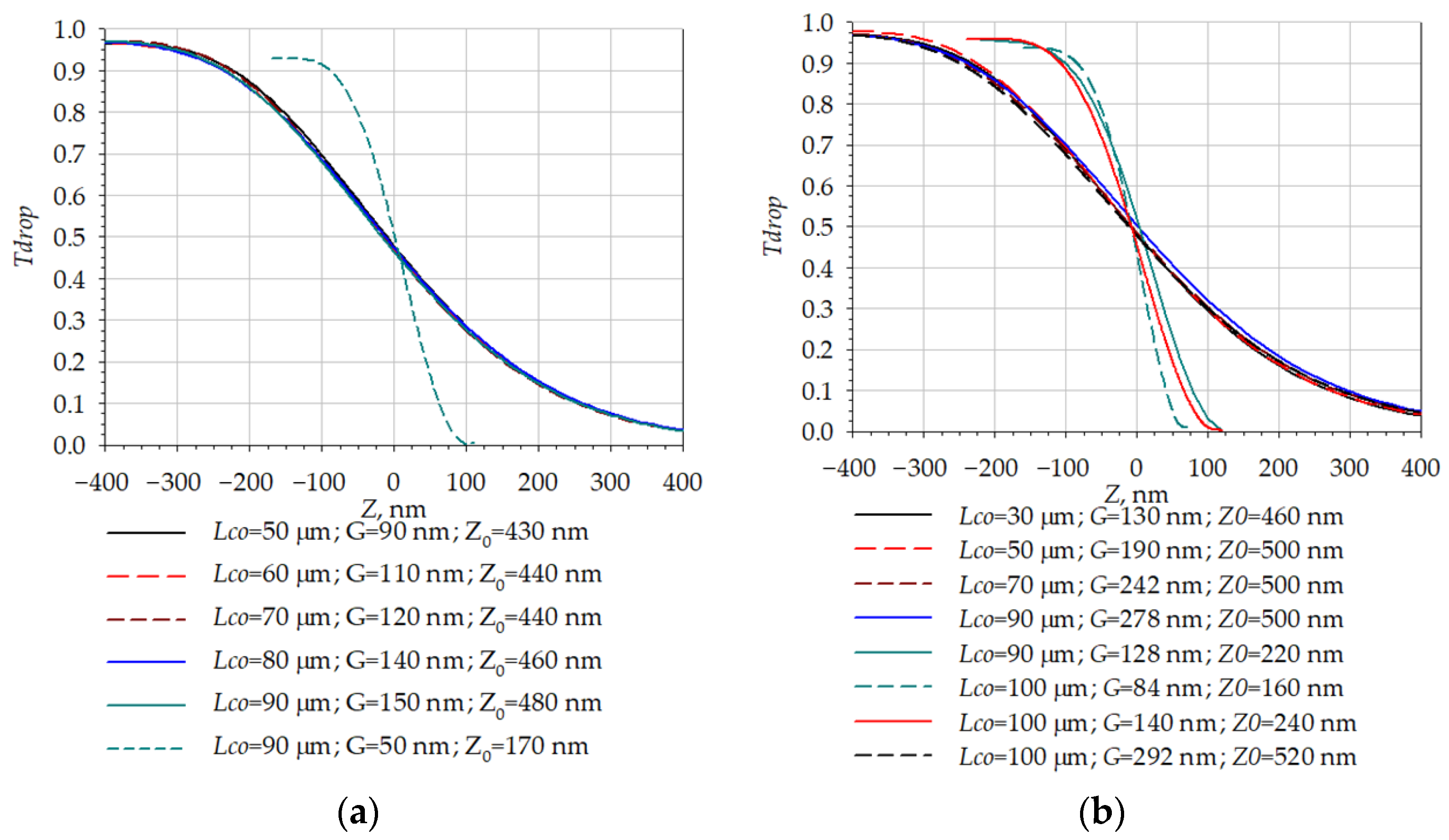
3.2.3. Changing the Overlapping Area
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, Y.-W.; Xiao, Y.-F.; Liu, Y.-C.; Gong, Q. Optomechanical Sensing with On-Chip Microcavities. Front. Phys. 2013, 8, 475–490. [Google Scholar] [CrossRef]
- Sun, P.; She, X.; Yao, J.; Chen, K.; Bi, R.; Wang, L.; Shu, X. Monolithic Integrated Micro-Opto-Electromechanical Accelerometer Based On Michelson Interferometer Structure. J. Light. Technol. 2022, 40, 4364–4372. [Google Scholar] [CrossRef]
- Lu, Q.; Bai, J.; Wang, K.; Chen, P.; Fang, W.; Wang, C. Single Chip-Based Nano-Optomechanical Accelerometer Based on Subwavelength Grating Pair and Rotated Serpentine Springs. Sensors 2018, 18, 2036. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Krause, A.G.; Winger, M.; Blasius, T.D.; Lin, Q.; Painter, O. A High-Resolution Microchip Optomechanical Accelerometer. Nat. Photonics 2012, 6, 768–772. [Google Scholar] [CrossRef] [Green Version]
- da Costa Antunes, P.F.; Lima, H.F.T.; Alberto, N.J.; Rodrigues, H.; Pinto, P.M.F.; de Lemos Pinto, J.; Nogueira, R.N.; Varum, H.; Costa, A.G.; de Brito Andre, P.S. Optical Fiber Accelerometer System for Structural Dynamic Monitoring. IEEE Sens. J. 2009, 9, 1347–1354. [Google Scholar] [CrossRef]
- Guo, T.; Shao, L.; Tam, H.-Y.; Krug, P.A.; Albert, J. Tilted Fiber Grating Accelerometer Incorporating an Abrupt Biconical Taper for Cladding to Core Recoupling. Opt. Express 2009, 17, 20651. [Google Scholar] [CrossRef] [Green Version]
- Lu, Q.; Wang, Y.; Wang, X.; Yao, Y.; Wang, X.; Huang, W. Review of Micromachined Optical Accelerometers: From mg to Sub-μg. Opto-Electron. Adv. 2021, 4, 200045. [Google Scholar] [CrossRef]
- Sundar, S.; Gopalakrishna, K.; Thangadurai, N. MOEMS-Based Accelerometer Sensor Using Photonic Crystal for Vibration Monitoring in an Automotive System. Int. J. Comput. Aided Eng. Technol. 2021, 14, 206. [Google Scholar] [CrossRef]
- Dubbert, J.; Müller, B.; Meyer, G. (Eds.) Advanced Microsystems for Automotive Applications 2018: Smart Systems for Clean, Safe and Shared Road Vehicles; Lecture Notes in Mobility; Springer International Publishing: Cham, Switzerland, 2019; ISBN 978-3-319-99761-2. [Google Scholar]
- Yazdi, N.; Ayazi, F.; Najafi, K. Micromachined Inertial Sensors. Proc. IEEE 1998, 86, 1640–1659. [Google Scholar] [CrossRef] [Green Version]
- Liu, H. Design, Fabrication and Characterization of a MEMS Gravity Gradiometer. Ph.D. Thesis, Imperial College London, London, UK, 2016. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Scudero, S.; Vitale, G. A Review of the Capacitive MEMS for Seismology. Sensors 2019, 19, 3093. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Liu, H.F.; Tu, L.C. High-Precision MEMS Inertial Sensors for Geophysical Applications. Navig Control. 2018, 17, 4–12. [Google Scholar]
- Wang, S.; Wei, X.; Zhao, Y.; Jiang, Z.; Shen, Y. A MEMS Resonant Accelerometer for Low-Frequency Vibration Detection. Sens. Actuators A Phys. 2018, 283, 151–158. [Google Scholar] [CrossRef]
- Gautam, A.; Kumar, A. Microseismic Wave Detection in Coal Mines Using Differential Optical Power Measurement. Opt. Eng. 2019, 58, 056111. [Google Scholar] [CrossRef]
- Basumallick, N.; Bhattacharya, S.; Dey, T.K.; Biswas, P.; Bandyopadhyay, S. Wideband Fiber Bragg Grating Accelerometer Suitable for Health Monitoring of Electrical Machines. IEEE Sens. J. 2020, 20, 14865–14872. [Google Scholar] [CrossRef]
- Chee, S.; Ryu, J.; Choi, H. New Optical Design Method of Floating Type Collimator for Microscopic Camera Inspection. Appl. Sci. 2021, 11, 6203. [Google Scholar] [CrossRef]
- Schröpfer, G.; Elflein, W.; de Labachelerie, M.; Porte, H.; Ballandras, S. Lateral Optical Accelerometer Micromachined in (100) Silicon with Remote Readout Based on Coherence Modulation. Sens. Actuators A Phys. 1998, 68, 344–349. [Google Scholar] [CrossRef]
- Cadarso, V.J.; Llobera, A.; Villanueva, G.; Seidemann, V.; Büttgenbach, S.; Plaza, J.A. Polymer Microoptoelectromechanical Systems: Accelerometers and Variable Optical Attenuators. Sens. Actuators A Phys. 2008, 145–146, 147–153. [Google Scholar] [CrossRef]
- Llobera, A.; Seidemann, V.; Plaza, J.A.; Cadarso, V.J.; Buttgenbach, S. Integrated Polymer Optical Accelerometer. IEEE Photonics Technol. Lett. 2005, 17, 1262–1264. [Google Scholar] [CrossRef]
- Llobera, A.; Seidemann, V.; Plaza, J.A.; Cadarso, V.J.; Buttgenbach, S. SU-8 Optical Accelerometers. J. Microelectromech. Syst. 2007, 16, 111–121. [Google Scholar] [CrossRef]
- Hall, N.A.; Okandan, M.; Littrell, R.; Serkland, D.K.; Keeler, G.A.; Peterson, K.; Bicen, B.; Garcia, C.T.; Degertekin, F.L. Micromachined Accelerometers with Optical Interferometric Read-Out and Integrated Electrostatic Actuation. J. Microelectromech. Syst. 2008, 17, 37–44. [Google Scholar] [CrossRef] [Green Version]
- Lu, Q.; Wang, C.; Bai, J.; Wang, K.; Lou, S.; Jiao, X.; Han, D.; Yang, G.; Liu, D.; Yang, Y. Minimizing Cross-Axis Sensitivity in Grating-Based Optomechanical Accelerometers. Opt. Express 2016, 24, 9094. [Google Scholar] [CrossRef]
- Lu, Q.; Bai, J.; Wang, K.; Lou, S.; Jiao, X.; Han, D.; Yang, G. Mechanical Design Optimization of a Single-Axis MOEMS Accelerometer Based on a Grating Interferometry Cavity for Ultrahigh Sensitivity. In Proceedings of the Interferometry XVIII (Volume 9960), San Diego, CA, USA, 28 August–1 September 2016; SPIE: San Diego, CA, USA, 2016; p. 99600W. [Google Scholar]
- Davies, E.; George, D.S.; Gower, M.C.; Holmes, A.S. MEMS Fabry–Pérot Optical Accelerometer Employing Mechanical Amplification via a V-Beam Structure. Sens. Actuators A Phys. 2014, 215, 22–29. [Google Scholar] [CrossRef]
- Davies, E.; George, D.S.; Holmes, A.S. Mechanically Amplified MEMS Optical Accelerometer with FPI Readout. In Proceedings of the MOEMS and Miniaturized Systems XIII (Volume 8977), San Francisco, CA, USA, 1–6 February 2014; SPIE: San Diego, CA, USA, 2014; p. 89770Z. [Google Scholar]
- Taghavi, M.; Latifi, H.; Parsanasab, G.M.; Abedi, A.; Nikbakht, H.; Sharifi, M.J. Simulation, Fabrication, and Characterization of a Sensitive SU-8-Based Fabry-Pérot MOEMS Accelerometer. J. Light. Technol. 2019, 37, 1893–1902. [Google Scholar] [CrossRef]
- Mireles, J.; Sauceda, Á.; Jiménez, A.; Ramos, M.; Gonzalez-Landaeta, R. Design and Development of a MOEMS Accelerometer Using SOI Technology. Micromachines 2023, 14, 231. [Google Scholar] [CrossRef] [PubMed]
- Bao, Y.; Cervantes, F.G.; Balijepalli, A.; Lawall, J.R.; Taylor, J.M.; LeBrun, T.W.; Gorman, J.J. An Optomechanical Accelerometer with a High-Finesse Hemispherical Optical Cavity. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016; IEEE: Laguna Beach, CA, USA, 2016; pp. 105–108. [Google Scholar]
- Gerberding, O.; Guzmán Cervantes, F.; Melcher, J.; Pratt, J.R.; Taylor, J.M. Optomechanical Reference Accelerometer. Metrologia 2015, 52, 654–665. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Sun, J.N.; Miliar, M.M.; Dong, F.Z.; Maier, R.R.J.; Hand, D.P.; MacPherson, W.N. Two-Dimensional Optical Fibre Cantilever Accelerometer. In Proceedings of the 24th International Conference on Optical Fibre Sensors (Volume 9634), Curitiba, Brazil, 28 September–2 October 2015; SPIE: Curitiba, Brazil, 2015; p. 96341E. [Google Scholar]
- Basumallick, N.; Chatterjee, I.; Biswas, P.; Dasgupta, K.; Bandyopadhyay, S. Fiber Bragg Grating Accelerometer with Enhanced Sensitivity. Sens. Actuators A Phys. 2012, 173, 108–115. [Google Scholar] [CrossRef]
- Chen, W.; Wang, J.; Wan, F.; Wang, P. Review of Optical Fibre Sensors for Electrical Equipment Characteristic State Parameters Detection. High Volt. 2019, 4, 271–281. [Google Scholar] [CrossRef]
- Fu, D.; Zhang, Y.; Zhang, A.; Han, B.; Wu, Q.; Zhao, Y. Novel Fiber Grating for Sensing Applications. Phys. Status Solidi A 2019, 216, 1800820. [Google Scholar] [CrossRef]
- Guo, Y.; Li, C.; Zhou, X.; Jiang, L.; Liu, H. Wide-Range Fiber Bragg Grating Tilt Sensor Based on a Cam Structure. IEEE Sens. J. 2020, 20, 4740–4748. [Google Scholar] [CrossRef]
- Bhola, B.; Steier, W.H. A Novel Optical Microring Resonator Accelerometer. IEEE Sens. J. 2007, 7, 1759–1766. [Google Scholar] [CrossRef]
- Jian, A.; Wei, C.; Guo, L.; Hu, J.; Tang, J.; Liu, J.; Zhang, X.; Sang, S. Theoretical Analysis of an Optical Accelerometer Based on Resonant Optical Tunneling Effect. Sensors 2017, 17, 389. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wan, F.; Qian, G.; Li, R.; Tang, J.; Zhang, T. High Sensitivity Optical Waveguide Accelerometer Based on Fano Resonance. Appl. Opt. 2016, 55, 6644. [Google Scholar] [CrossRef] [PubMed]
- Dushaq, G.H.; Muluget, T.; Rasras, M. Micro-Opto-Mechanical Disk for Inertia Sensing. Photonic Sens. 2016, 6, 78–84. [Google Scholar] [CrossRef] [Green Version]
- Barbin, E.S.; Nesterenko, T.G.; Koleda, A.N.; Shesterikov, E.V.; Kulinich, I.V.; Kokolov, A.A. A System for Positioning an Optical Tunnel Measuring Transducer of a Microoptoelectromechanical Micro-g Accelerometer. In Proceedings of the 2022 IEEE 23rd International Conference of Young Professionals in Electron Devices and Materials (EDM), Altai, Russia, 30 June–4 July 2022; IEEE: Altai, Russia, 2022; pp. 42–47. [Google Scholar]
- Barbin, E.S.; Nesterenko, T.G.; Koleda, A.N.; Shesterikov, E.V.; Kulinich, I.V.; Sheyerman, F.I. Estimating the Sensitivity of Microoptoelectromechanical Micro-g Accelerometer. In Proceedings of the 2022 IEEE 23rd International Conference of Young Professionals in Electron Devices and Materials (EDM), Altai, Russia, 30 June–4 July 2022; IEEE: Altai, Russia, 2022; pp. 52–56. [Google Scholar]
- Yao, Y.; Pan, D.; Wang, J.; Dong, T.; Guo, J.; Wang, C.; Geng, A.; Fang, W.; Lu, Q. Design and Modification of a High-Resolution Optical Interferometer Accelerometer. Sensors 2021, 21, 2070. [Google Scholar] [CrossRef] [PubMed]
- Kokolov, A.A.; Konkin, D.A.; Koryakovtsev, A.S.; Sheyerman, F.I.; Babak, L.I. Microwave Photonic ICs for 25 Gb/s Optical Link Based on SiGe BiCMOS Technology. Symmetry 2019, 11, 1453. [Google Scholar] [CrossRef] [Green Version]
- Chrostowski, L.; Hochberg, M.E. Silicon Photonics Design; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2015; ISBN 978-1-107-08545-9. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device Type | Sensitivity | Resonance Frequency [Hz] | Self-Noise | Dynamic Range [g] | Bandwidth [Hz] |
|---|---|---|---|---|---|
| Michelson interferometer [2] | 3.638 nm/g | 1742.2 Hz | – | ±500 | – |
| Photonic crystal zipper [4] | 10 mg/√Hz | – | – | – | 20,000 |
| Subwavelength grating pair [3] | 1.56 nm/mg | – | – | – | – |
| Fiber Bragg gratings [5] | 0.997 V·g | – | – | – | – |
| Fiber Bragg grating [16] | 14.4–7.5 pm/g | 444–940 Hz | 15 ng/√Hz | 0.2–20 | 400–900 |
| Optical polymers waveguides [20] | 34.1 μm/g | – | – | – | – |
| On–chip optical interferometry [22] | 24.4 µg/√Hz | 4500–6400 | 43.7 ng/√Hz | – | – |
| Fabry-Pérot resonator [27] | 12.5 µW/g | 1872 | – | ±1 | – |
| Fabry–Pérot interferometer [28] | 1.022–1.029 mV/(m/s2) | 1274 | – | – | – |
| Hemispherical optical cavity [29] | 1 µg/√Hz | >30,000 | – | – | – |
| Mach–Zehnder interferometer [30] | – | 646.56 | 7.8 × 10−5 (m/s2)/Hz | – | – |
| Fibre cantilever [31] | – | – | ~0.2 g | – | 10–2000 |
| Fiber Bragg grating [32] | 450 pm/g | – | – | – | – |
| Optical microring resonator [36] | 31 pm/g | – | – | ±7 | – |
| Resonant optical tunneling effect [37] | 9 pm/g | – | – | ±130 | 10–1500 |
| Mach–Zehnder interferometer [38] | 111.75 mW/g | – | – | – | – |
| Optical tunneling effect [39] | 3 dB/g | – | – | 1–10 | – |
| Scheme | Altering Parameter | Waveguide Dimensions [nm] | Sensitivity [m−1] | Dynamic Range [nm] |
|---|---|---|---|---|
| Same–plane waveguides | ||||
| 1, 4 | gap | 300 × 1000 | (6.25–25) × 106 | ±20–80 |
| 300 × 750 | (6.25–50) × 106 | ±15–80 | ||
| 2, 5 | coupling length | 300 × 1000 | (12.5–33) × 103 | ±15,000–40,000 |
| 300 × 750 | (10–83) × 103 | ±6000–40,000 | ||
| 3.6 | waveguide overlapping | 300 × 1000 | (1.25–5) × 106 | ±100–400 |
| 300 × 750 | (1.25–10) × 106 | ±100–400 | ||
| Different–plane waveguides | ||||
| 9, 12 | gap | 300 × 1000 | (6.25–250) × 106 | ±2–80 |
| 300 × 750 | (6.25–160) × 106 | ±6–80 | ||
| 8, 11 | coupling length | 300 × 1000 | (1.25–250) × 103 | ±3000–40,000 |
| 300 × 750 | (1.25–500) × 103 | ±1000–40,000 | ||
| 7, 10 | waveguide overlapping | 300 × 1000 | (1.25–10) × 106 | ±60–400 |
| 300 × 750 | (1.25–12.5) × 106 | ±40–400 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbin, E.; Nesterenko, T.; Koleda, A.; Shesterikov, E.; Kulinich, I.; Kokolov, A. An Optical Measuring Transducer for a Micro-Opto-Electro-Mechanical Micro-g Accelerometer Based on the Optical Tunneling Effect. Micromachines 2023, 14, 802. https://doi.org/10.3390/mi14040802
Barbin E, Nesterenko T, Koleda A, Shesterikov E, Kulinich I, Kokolov A. An Optical Measuring Transducer for a Micro-Opto-Electro-Mechanical Micro-g Accelerometer Based on the Optical Tunneling Effect. Micromachines. 2023; 14(4):802. https://doi.org/10.3390/mi14040802
Chicago/Turabian StyleBarbin, Evgenii, Tamara Nesterenko, Aleksei Koleda, Evgeniy Shesterikov, Ivan Kulinich, and Andrey Kokolov. 2023. "An Optical Measuring Transducer for a Micro-Opto-Electro-Mechanical Micro-g Accelerometer Based on the Optical Tunneling Effect" Micromachines 14, no. 4: 802. https://doi.org/10.3390/mi14040802