Abstract
This article presents a novel technique for a class 2 tensegrity robot, also classified as a soft robot, to increase workspace by increasing the number of geometric equilibrium configurations of the robot. The proposed modification, unlike the strategies reported in the literature, consists of increasing the number of points where the flexible and rigid elements that make up the robot come into contact without the need to increase the number of actuators, the number of flexible elements, or modify the geometry of the rigid elements. The form-finding methodology combines the basic principles of statics with the direct and inverse kinematic position analysis to determine the number of equilibrium positions of the modified robot. In addition, numerical experiments were carried out using the commercial software ANSYS®, R18.2 based on the finite element theory, to corroborate the results obtained with them. With the proposed modification, an increase of 23.369% in the number of geometric equilibrium configurations is achieved, which integrates the workspace of the modified class 2 tensegrity robot. The novel technique applied to tensegrity robots and the tools developed to increase their workspace apply perfectly to scale the robots presented in this paper.
1. Introduction
The term tensegrity was used for the first time by Buckminster Fuller et al. in 1975 [1]; it comes from the combination of the words “tensional” and “integrity”, referring to structures that maintain their shape when subjected to internal tension and compression loads by all the elements that comprise them. One of the most accepted definitions for tensegrity systems is the one proposed by A. Pugh [2], where he defines them as a set of discontinuous elements subject to compression loads that interact with a set of continuous elements subject to tension loads, forming a stable volume in space; the discontinuous elements are called bars, and the continuous ones are denominated flexible elements. Incorporating various types of actuators, such as McKibben artificial muscles [3], which enable the variation of the length of flexible elements into a tensegrity structure, creates tensegrity robots. The actuators incorporated into tensegrity robots can be powered by various sources of motion, such as EHD pumps [4], piezoelectric materials [5], and cable–pulley systems [6], among others. Several robots designed based on the concept of tensegrity systems have been reported in the literature. A notable example is a robot with a fundamental tensegrity structure known as the Snelson Cross, proposed by J. Begay et al. [7]. Additionally, robots inspired by more intricate tensegrity structures have been documented. These include an arm-type tensegrity robot with multiple elementary tensegrity structures connected in series [8,9]. Worm-like mobile robots with multiple movement modes and minimal actuators have also been proposed, as demonstrated by Y. Jin et al. [10]. Furthermore, there are reports of mobile robots equipped with wheels inspired by the dynamics of the human spine for duct inspection, such as the one developed by F. Carreño and M.A. Post [11]. Also, a platform-type robot based on a structure with variable stiffness and deployable capabilities has been developed by D. Zappetti et al. [12], among others.
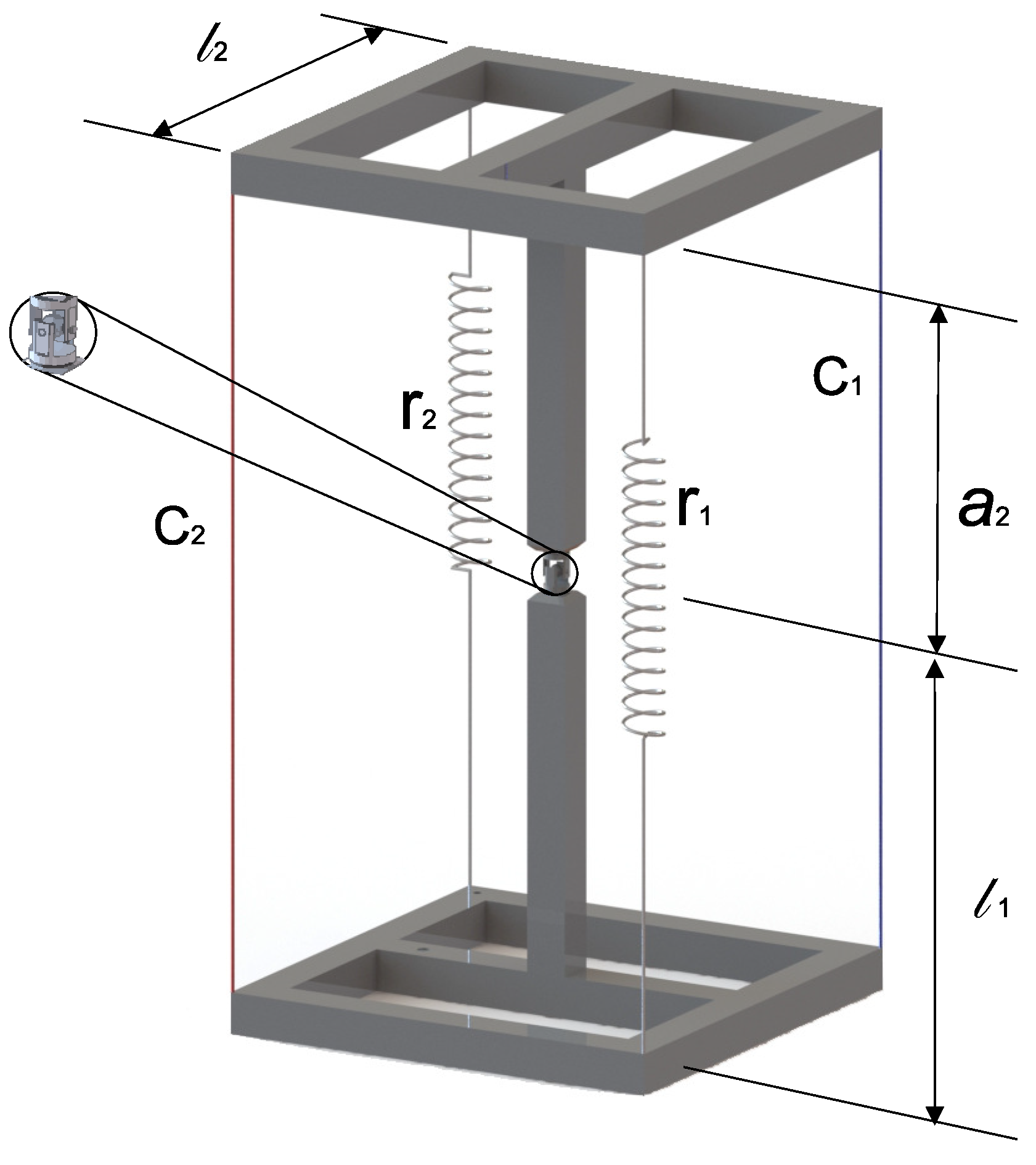
C.G. Manríquez-Padilla et al. [13] proposed a new robot based on a tensegrity structure, which, according to the classification proposed by R. E. Skelton et al. [14], is classified as a tensegrity class 2 structure. The proposed robot comprises two rigid substructures joined at one of their ends by a universal joint and, at the remaining ends, using four flexible elements, marked as , , , and , as shown in Figure 1.
Figure 1.
Class 2 tensegrity robot.
In Figure 1, the flexible elements marked as and represent tension springs, while the flexible elements marked as and represent cables. The cable lengths are variable and are controlled by turning a pulley attached to a servomotor.
A form-finding analysis must be performed to determine the workspace of the robot, that is, the set of possible geometric configurations that the robot can reach or between which one can migrate without collapsing. Several strategies have been reported in the literature that aim to solve the form-finding analysis; among them, there are some based on neural networks [15], the Levenberg–Marquardt method [16], methods based on force density matrix [17], some others based on optimization algorithms [18], and genetic algorithms combined with potential energy minimization [19]. For the class 2 tensegrity robot reported in [13] and illustrated in Figure 1, C.G. Manríquez-Padilla et al. [20] proposed a solution strategy for the form-finding analysis based on a combination of the fundamental principles of statics and the direct and inverse kinematic position analysis using the geometric parameters proposed by Denavit–Hartenberg [21]. In the same study, a case was presented wherein 14,641 geometric configurations were analyzed, and only 215 were classified as equilibrium geometric configurations.
Tensegrity-structures-based robots, by combining soft materials with rigid materials, present considerable challenges when designing and building them, especially when it is necessary to modify their workspace. As outlined in the previously mentioned literature, the modification of the workspace for tensegrity structures composed of elementary tensegrity structures (tetrahedra, dodecahedra, icosahedra, etc.) is accomplished by connecting several elementary structures at their ends, thereby increasing the number of elements that compose the robot. The methodology mentioned above cannot be applied to tensegrity robots with more complex structures that are not composed of elementary tensegrity structures because the base structure lacks a homogeneous distribution of elements. Consequently, the strategies to modify the workspace of intricate tensegrity-structures-based robots have not been fully defined due to the complexity of the interaction of the elements [22]. Therefore, based on the outcomes presented in [20], this paper introduces a redesign of the class 2 tensegrity robot. The redesign involves altering the mode of interaction between the flexible and rigid elements comprising the class 2 tensegrity robot, as depicted in Figure 1. The novelty of this proposed redesign aims to augment the number of equilibrium geometric configurations and, thereby, enhance the workspace of the robot, all without requiring an increase in the number of servomotors or flexible elements.
To achieve this goal, in Section 2.1, a brief description of the modified class 2 tensegrity robot is presented, followed by the description of the Denavit–Hartenberg parameters used to develop the kinematic position analysis. Section 2.4 introduces the development of the kinematic position analysis for the modified robot and the methodology corresponding to the inverse kinematic position analysis. Subsequently, the static analysis and the form-finding analysis are presented. Section 3 and Section 4 present the numerical experiments of a study case using commercial software based on finite element theory, ANSYS®R18.2. The results from the numerical experiments are used to corroborate the proposed redesign of the class 2 tensegrity robot.
2. Methodology
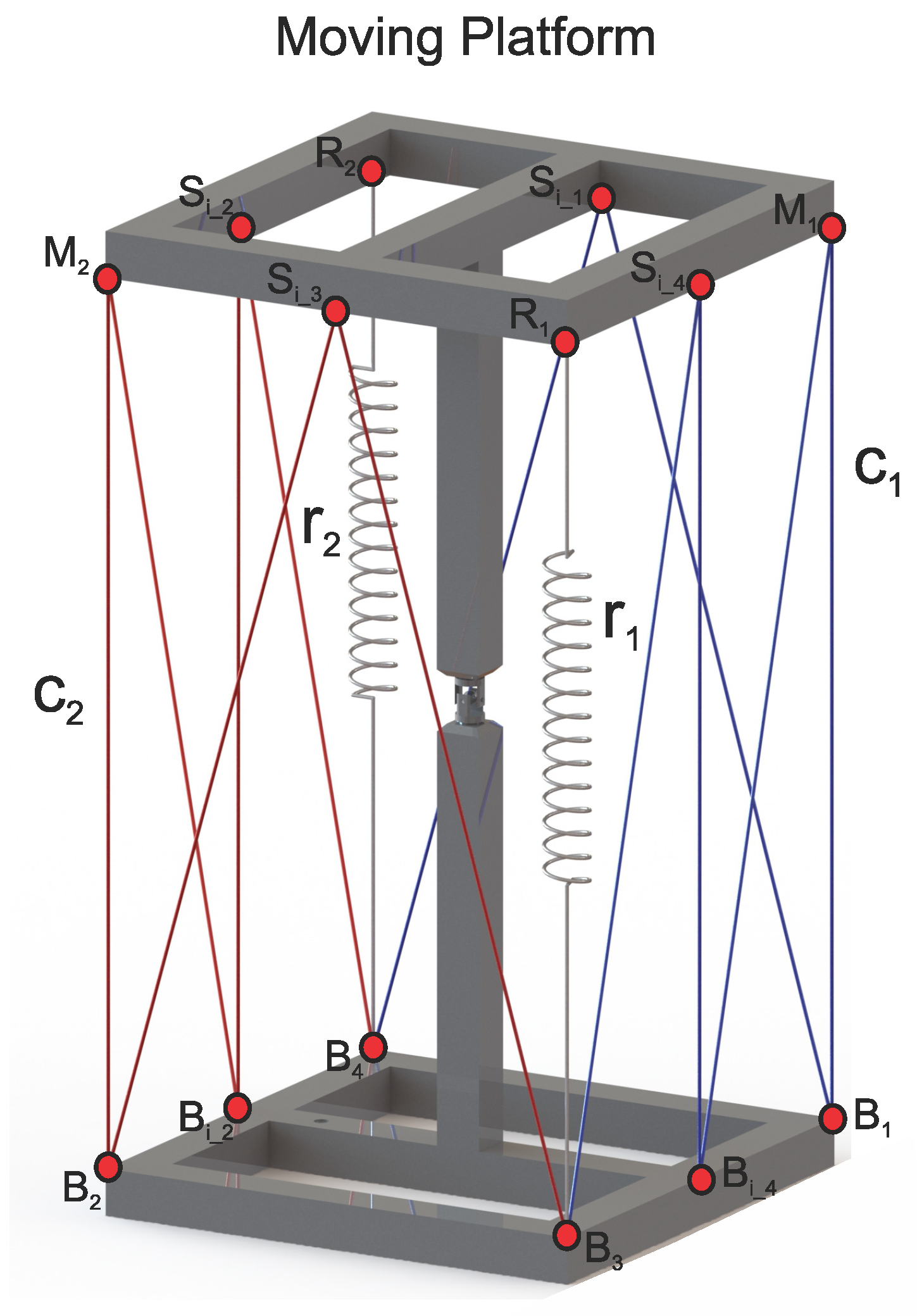
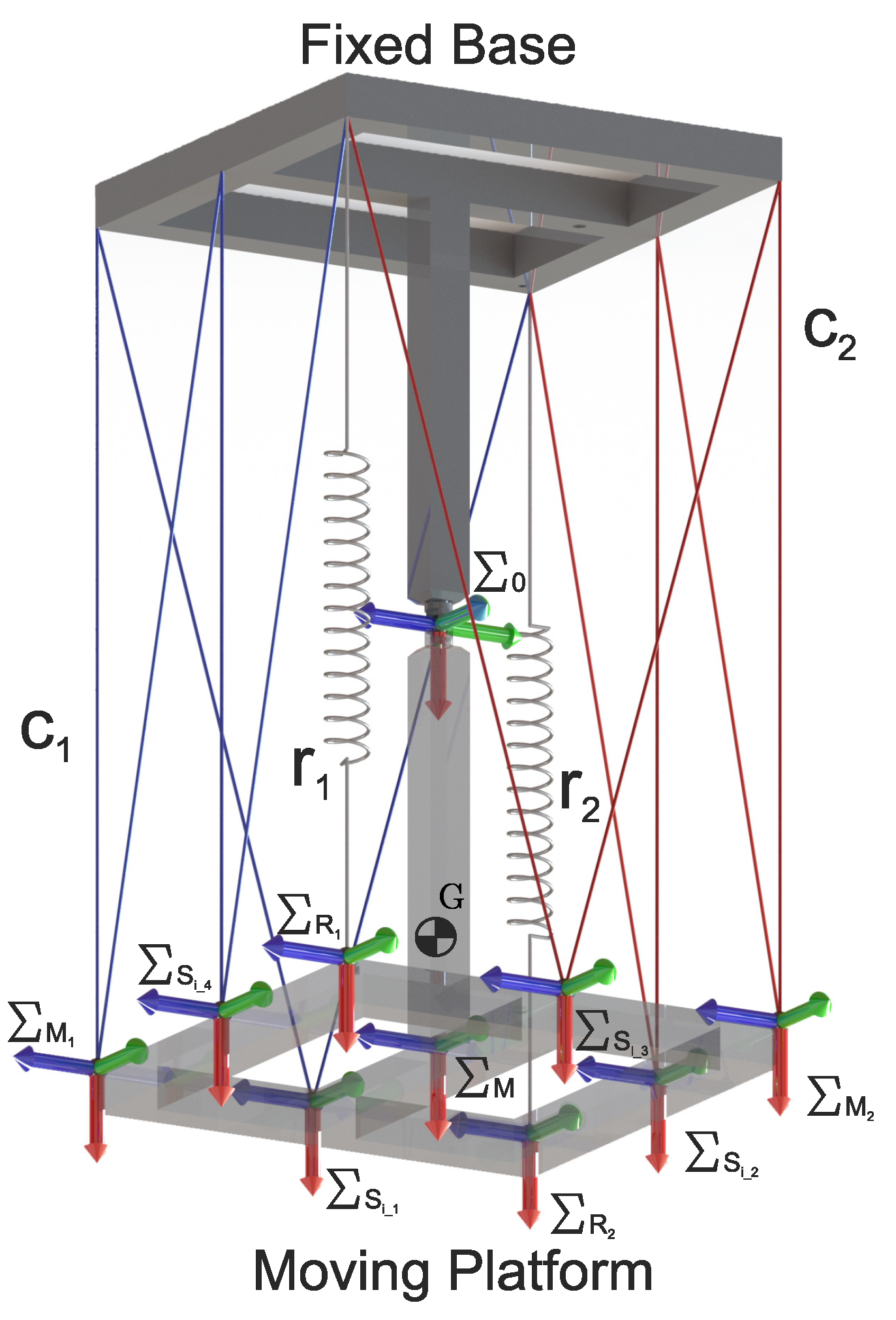
This section presents a detailed description of the novel technique proposed to increase the workspace of a class k tensegrity robot. To achieve this, the modification proposed for the class 2 tensegrity robot shown in Figure 2 and the technique developed to solve the form–finding problem are detailed. Unlike the strategies to increase the workspace reported in the literature, the proposed technique does not require increasing the number of actuators, modifying the kinematic structure of the robot, or increasing the number of elastic elements that compose it.
Figure 2.
Proposed class 2 tensegrity robot.
2.1. Description of the Modified Class 2 Tensegrity Robot
The following argument is presented as a hypothesis to increase the number of equilibrium geometric configurations for a class 2 tensegrity robot: “The increase in the number of points where the flexible elements come into contact with both the fixed base and the mobile platform is proportional to the increase in the number of equilibrium geometric configurations”.
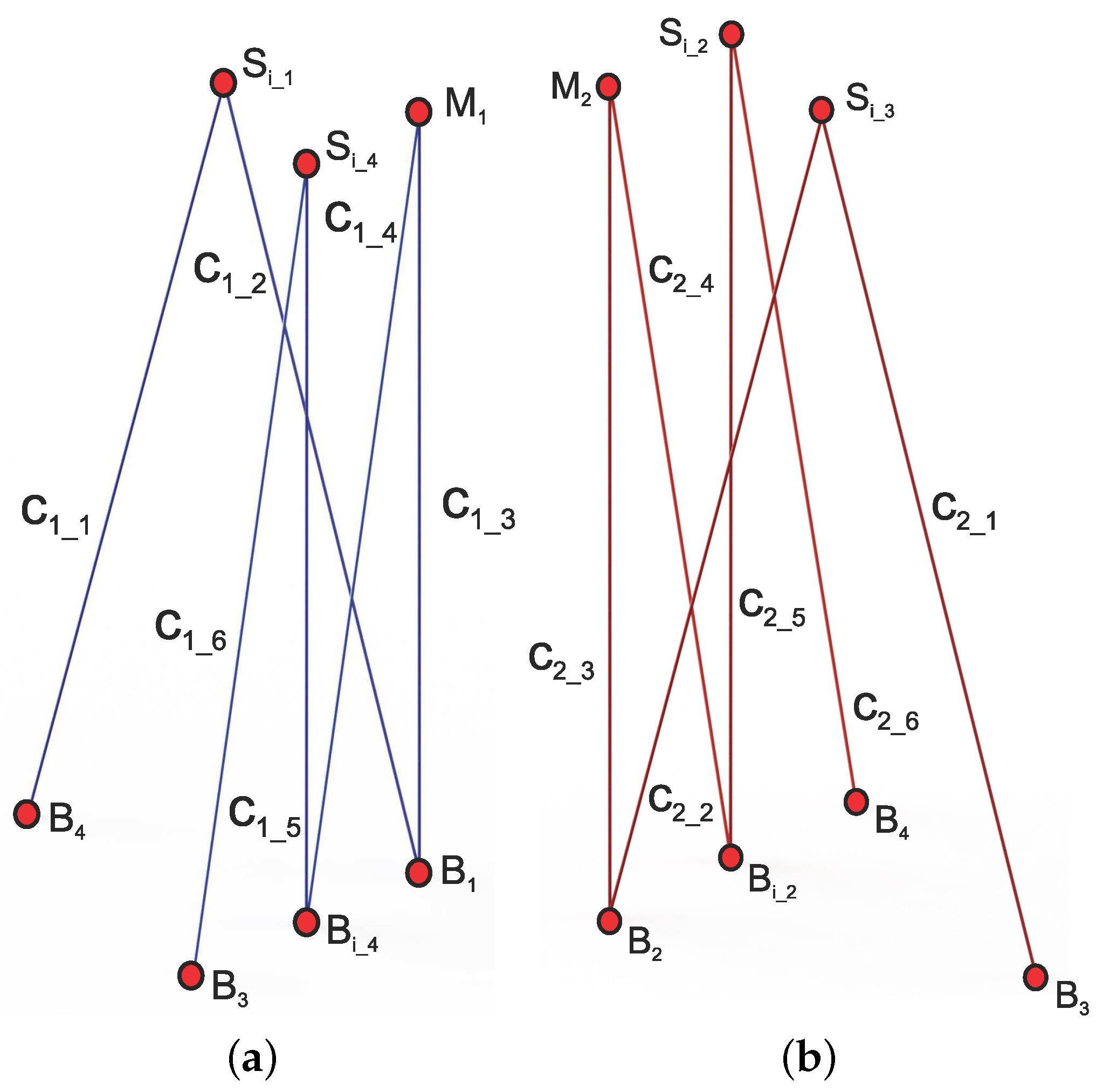
To increase the contact points between the flexible and rigid elements of the class 2 tensegrity robot, it is necessary to attach a pulley system that allows the cables with variable lengths, and , shown in Figure 1, to be in contact with the moving platform and the fixed base at multiple points. The proposed design of this pulley system is shown in Figure 2.
Figure 2 depicts the flexible elements highlighted in blue and red, corresponding to cables with variable lengths and , respectively. Furthermore, the flexible elements labeled as and represent tensional springs with constant stiffness. Points and , marked on the mobile platform, define the original interaction points between the rigid and flexible elements found in both robots; the robot is shown in Figure 1, and the proposed robot is shown in Figure 2. In the same way, points labeled , , , and represent the points of interaction between the rigid and flexible elements that were added to increase the workspace. Similarly, on the fixed base, points labeled , , , , , and , represent all the points where the cables with variable lengths and come into contact with the fixed base. The pulley systems are located on the points described above. For the present work, the pulley system is considered a friction-free system, designed to allow the free interaction between the flexible elements, cables with variable lengths and , and the rigid elements of the mobile platform and the fixed base.
2.2. Kinematic Position Analysis of the Modified Class 2 Tensegrity Robot
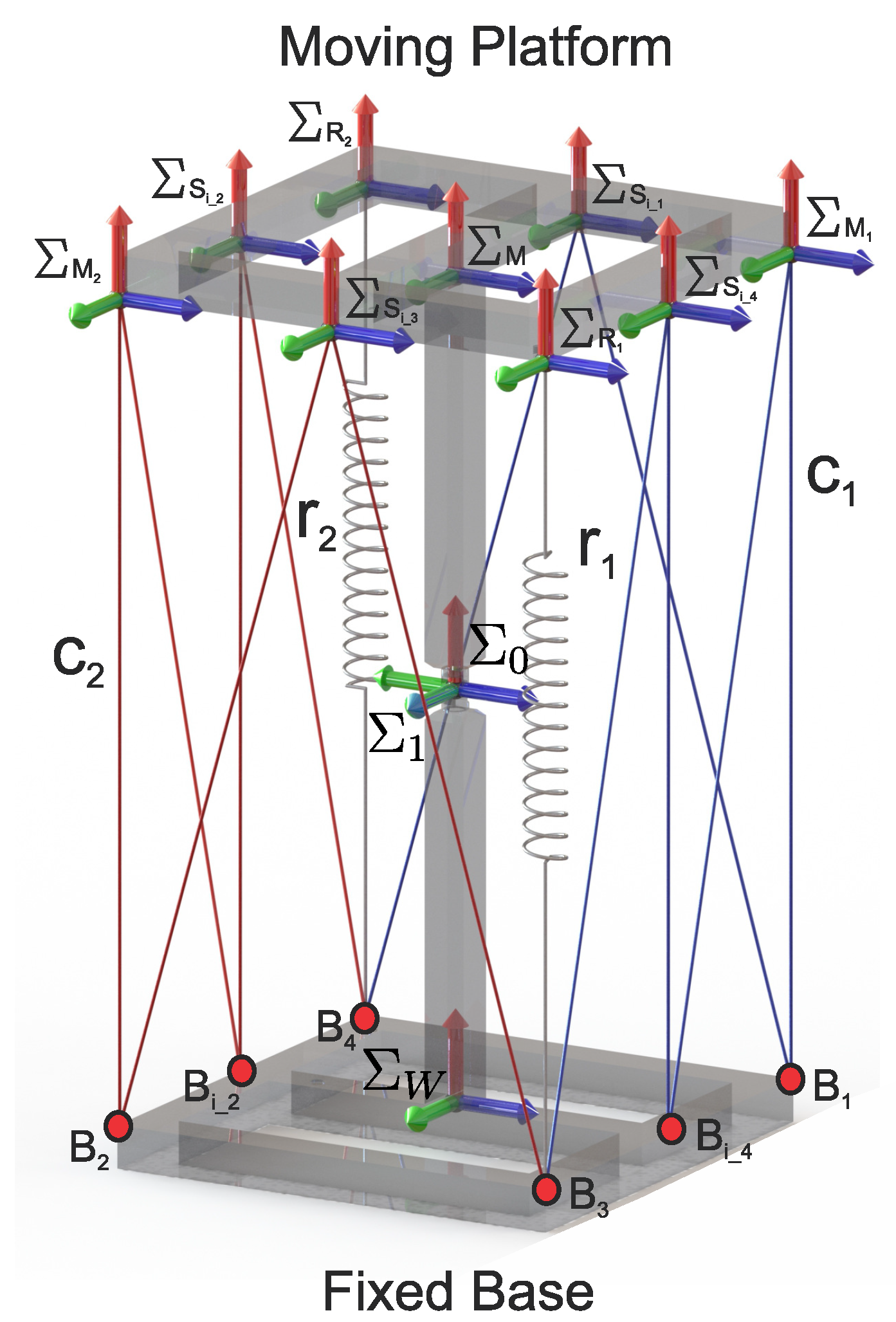
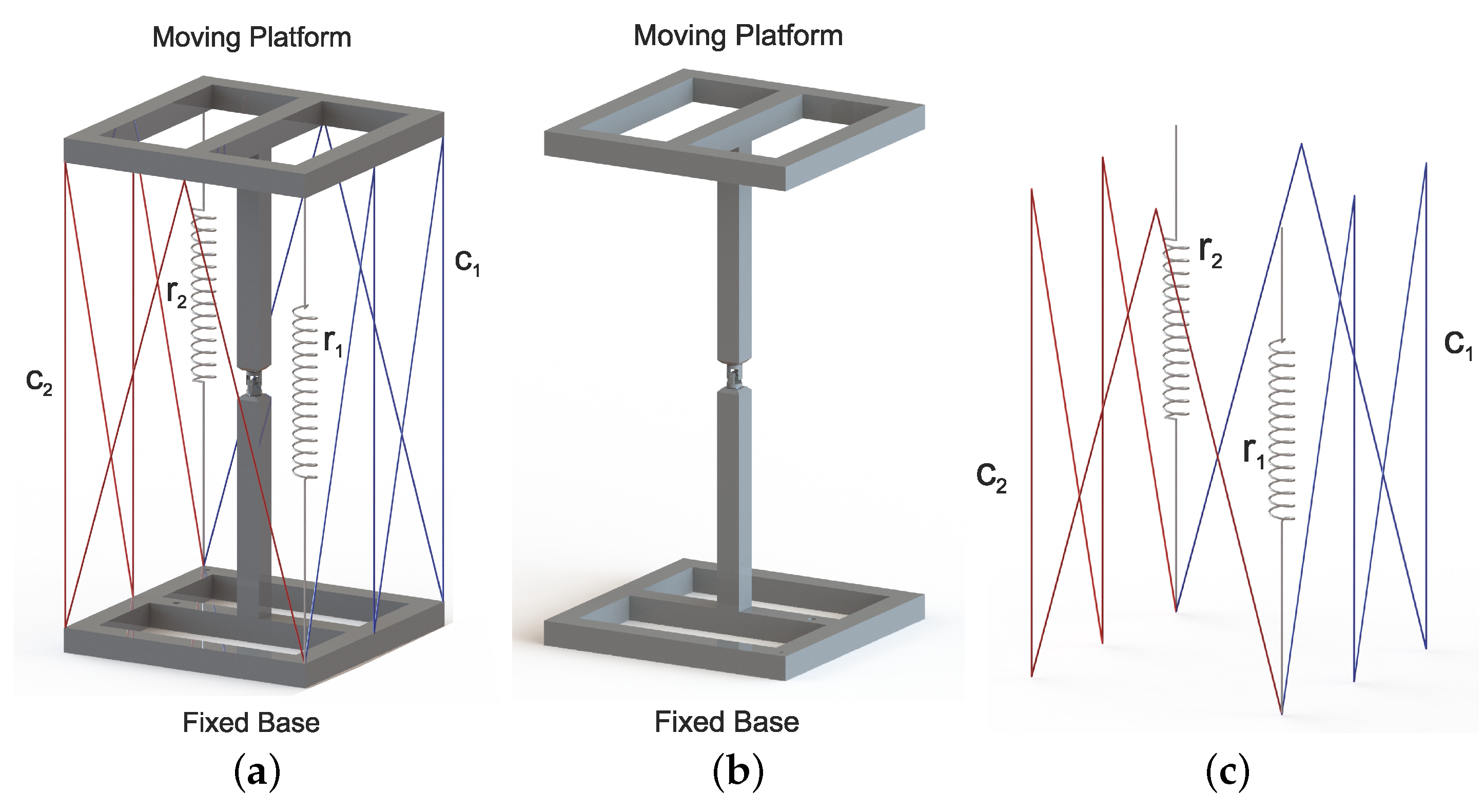
For the proposed class 2 tensegrity robot, shown in Figure 3, the methodology described in [13] was implemented, which consists of performing a kinematic decoupling of the robot to carry out the direct and inverse kinematic position analysis for both the flexible and rigid elements independently. Decoupling the tensegrity robot is carried out in two parts: the rigid elements shown in Figure 4b and the flexible elements shown in Figure 4c; the joint variables of the universal joint can be related with the variation in the lengths of the flexible elements.
Figure 3.
Coordinate reference systems attached to the proposed robot.
Figure 4.
Decouple class 2 tensegrity robot. (a) Modified robot. (b) Rigid part. (c) Flexible part.
2.2.1. Denavit–Hartenberg Parameters
For the modified class 2 tensegrity robot, the Denavit–Hartenberg distal parameters [23] establish the reference frames shown in Figure 3, coloring the axes x, y, and z as red, green, and blue, respectively.
Table 1 shows the Denavit–Hartenberg distal parameters of the proposed class 2 tensegrity robot, where
- is the distance measured from the axis to the axis along the axis.
- is the angle between the axis and the axis measured around the axis, following the right-hand convention.
- is the distance measured from the axis to the axis along the axis.
- is the angle between the axis and the axis measured around the axis, following the right-hand convention.

Table 1.
Denavit–Hartenberg parameters for the robot.
Table 1.
Denavit–Hartenberg parameters for the robot.
| i | ||||
|---|---|---|---|---|
| mm | rad | mm | rad | |
| 1 | 0 | 0 | ||
| 2 | 0 |
For the kinematic position analysis, it is necessary to define ten auxiliary reference frames, as shown in Figure 3, where the reference frame is called the reference frame of the fixed base, and the reference frame is considered the terminal organ of the modified class 2 tensegrity robot. The remaining reference frames are used to describe the position of the points where the flexible elements are in contact with the mobile platform of the robot with respect to . To accomplish this, the origin of the reference frames, , , , , , , , and , must be in the same position as the points , , , , , , , and , respectively, as shown in Figure 2.
By design criteria, the coordinates of the points , , , , , and are known with respect to . Considering the displacement of the fixed base as non-existent, it can be said that the coordinates of all points located on it are known and invariant in time.
2.2.2. Direct Kinematic Position Analysis
The kinematic analysis of the proposed class 2 tensegrity robot, shown in Figure 4a, serves to describe the position and orientation of the mobile platform of the tensegrity robot with respect to the reference frame as a function of the variable joints that show the variations in the lengths of cables and . Considering the above, it is necessary to define the variations in the cable lengths, and , as a function of the degrees of rotation of joints 1 and 2 described by the variables and .
To analyze the rigid elements, the distal Denavit–Hartenberg parameters contained in Table 1 are used in combination with the homogeneous transformation matrix for the distal variant [23], described by
where , , , . Substituting the values of Table 1, in the Equation (1), the homogeneous transformation matrices and are obtained and defined by
In addition, the auxiliary reference frames described in Figure 3 are used to obtain the homogeneous transformation matrices that define the position and orientation of the points located on the mobile platform shown in Figure 2 using
where describes the homogeneous transformation matrix that relates the reference frame with respect to ; conversely, the homogeneous transformation matrices , , relate the auxiliary reference frames , , , , , , , with the reference frame . The variables and represent the distance between the axis and measured along the axis and the length of the mobile platform measured along the axis y as shown in Figure 1, respectively. Also, is defined.
By multiplying (2)–(4), the homogeneous transformation matrix is obtained, and it describes the position and orientation of the reference frame with respect to , i.e., [24],
Similarly, by multiplying (9)–(13), the position and orientation of the reference frames located on the mobile platform of the robot are obtained, Figure 3, relative to , i.e.,
Considering the above, as shown in Figure 5, the total lengths of cables and are defined as
where and represent the individual lengths of each of the six segments that make up cables and , respectively. To determine the individual lengths of the cable segments , the coordinates of the contact points , , , , , , with respect to , are assumed to be known based on the dimensions of the tensegrity robot, provided by
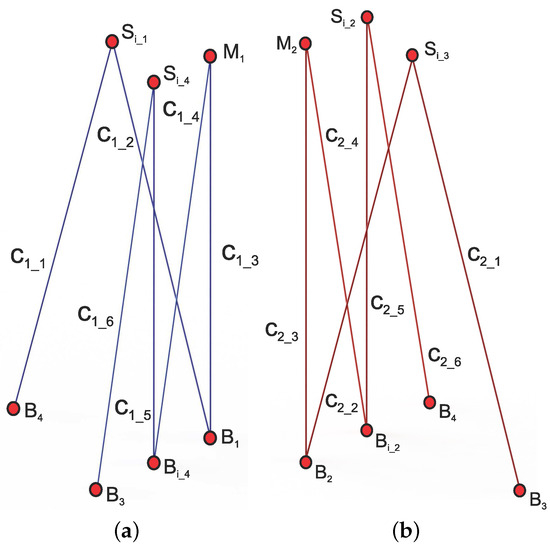
Figure 5.
Segmentation of cables and : (a) cable segments ; (b) cable segments .
Then, the position vectors of the homogeneous transformation matrices (14)–(21) with respect to the fixed base reference frame are provided by
where and . Using the position vectors described in (24)–(29), the position vectors describing the cable segments are obtained as
2.2.3. Inverse Kinematic Position Analysis
The objective of the inverse kinematic position analysis is to be able to describe the variations in the lengths of cables and given a desired configuration of the tensegrity robot. Therefore, the above is possible once the solutions for the variables and are obtained, corresponding to the desired robot configuration.
2.3. Static Analysis for the Class 2 Tensegrity Robot
Static analysis is the set of operations to calculate the magnitude of the internal forces, , that act on the i–elements that make up the tensegrity robot, whose input data are the values of the variables, and . Static analysis is particularly useful to determine if a specific geometric configuration can be considered as an equilibrium geometric configuration, that is, a geometric configuration where the center of mass of the robot does not present movement.
For analysis purposes, consider the geometric configuration of the class 2 tensegrity robot shown in Figure 6.
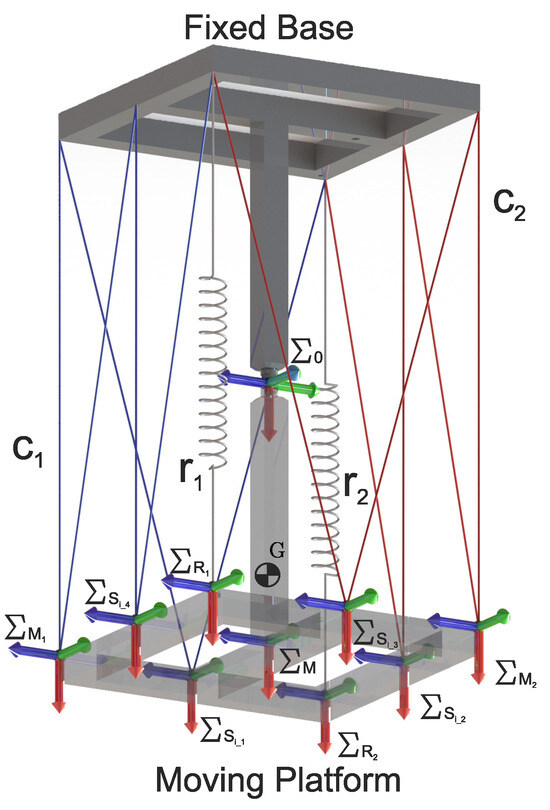
Figure 6.
Reference frames used in the static analysis of the modified class 2 tensegrity robot.
It is considered that the weight of the mobile platform is concentrated in its centroid, G. As a reference point for the calculation of displacements, forces, and moments, frame is used; furthermore, the position and orientation of the reference frame is used to describe the desired geometric configuration.
Notice that the following data are known:
- Total lengths, and , corresponding to cables and , respectively.
- The lengths, and , corresponding to the springs and , respectively.
- The position and orientation of the reference frames, , , , , , , , , and , with respect to the reference frame.
Furthermore, as design parameters are known:
- The lengths of the undeformed springs, and , corresponding to the tension springs and , respectively.
- The position of the centroid, G, corresponding to the moving platform with respect to the reference frame .
- The total mass of the robot.
Then, through the static analysis of the tensegrity robot, the values of the stiffness constants that ensure an equilibrium position, , and , can be established, corresponding to the springs and , respectively.
Using the methodology proposed in [13], the fixed base and the flexible elements are replaced by the forces and moments exerted on the mobile platform, obtaining the free-body diagram shown in Figure 7.
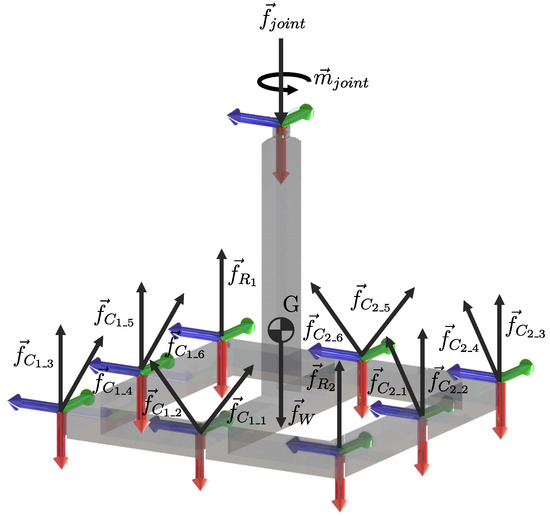
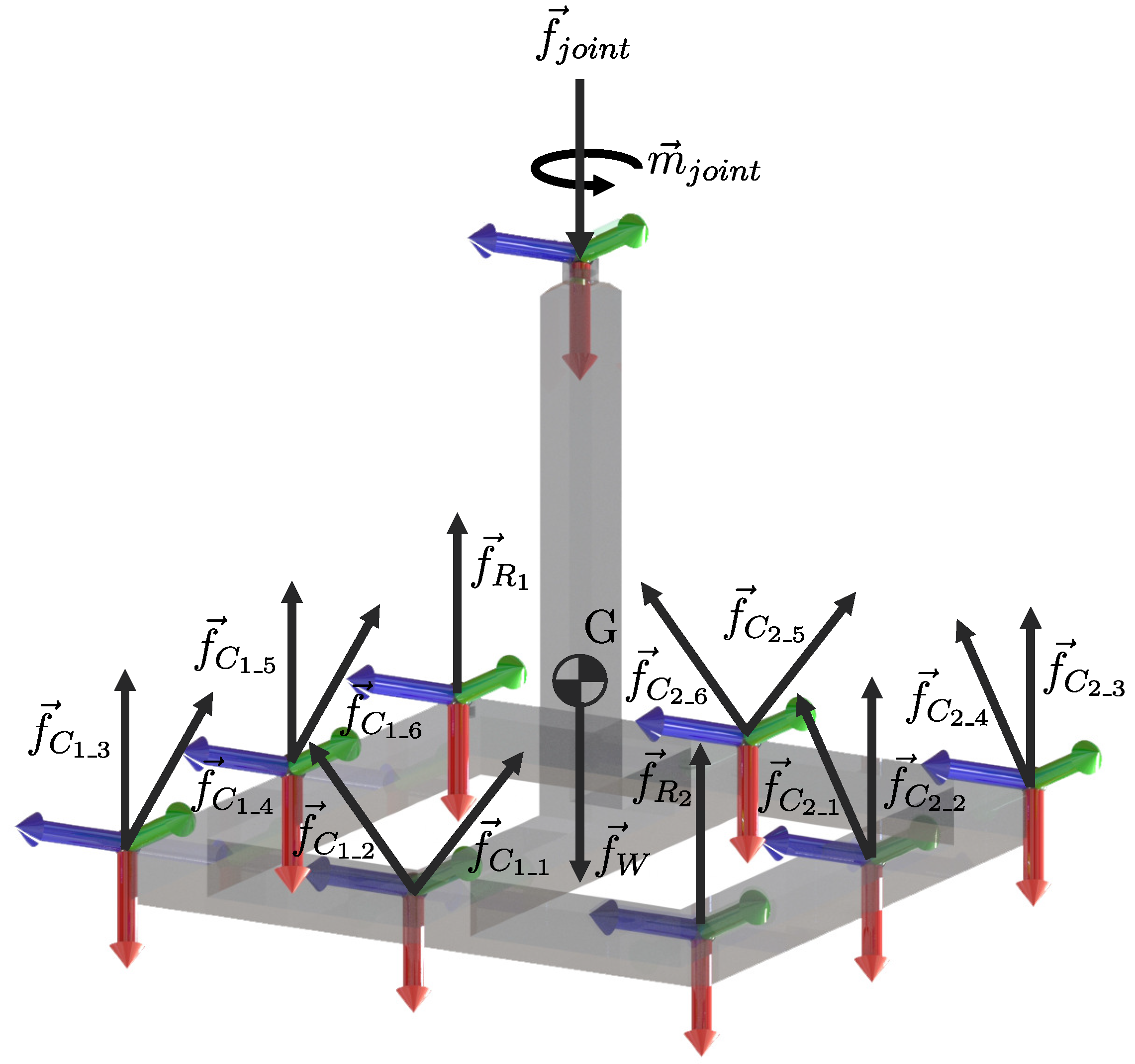
Figure 7.
Free body diagram of the mobile platform.
Figure 7 shows all the moments and forces acting upon the mobile platform; the force labeled as and with represents the loads applied by the cables and over the mobile platform of the robot; the forces and express the loads applied by the tension springs and , respectively; the force represents the force exerted by gravity on the moving platform applied to its centroid, G. Likewise, the force-couple equivalent system composed of the force and the moment constitute the force and the moment of reaction that the universal joint exerts on the mobile platform.
The forces and moments exerted by the flexible elements on the mobile platform are defined as follows:
where the unit vectors, and with , are obtained following the order shown in Figure 5 and from the direct kinematic position analysis provided by (32)–(43); the unit vectors and are calculated using the distribution of points shown in Figure 2; the unit vector indicates the direction of the axis belonging to the reference frame , observed from the reference frame obtained from the matrix defined by multiplying the matrices (2) and (3), while .
Then, the equivalent force-couple system according to the forces and moments (48) is provided by [25]
where , , , , , , , , and represent the distance vectors measured from the origin of the reference frame to the points , , , , , , , and G, respectively.
The conditions that guarantee that the equivalent force-couple system described by (49) and (50) is in equilibrium are provided by
By substituting the equivalent force-couple system provided by (49) and (50), under equilibrium conditions (51), a system of six equations with six unknowns is obtained. The solution of this system of equations provides the magnitudes of the forces and the moment, i.e., , , , , and .
On the other hand, the magnitudes of the forces, and , exerted by the springs on the mobile platform, can also be expressed as
where and are the longitudinal deformations of the springs and , respectively, when they are subjected to an axial force. The longitudinal deformation of the springs is calculated by
2.4. Form-Finding Analysis
For the form-finding analysis of the proposed class 2 tensegrity robot, the methodology presented in [20] is applied, where the set of all possible geometric configurations of the robot provided by and are analyzed, and a subset of equilibrium configurations provided by and is determined.
The set of all possible configurations is established as follows: for each a set with and is defined by
Then, the subset of equilibrium configurations is defined that must satisfy (51), and they are expressed by
By solving the system of equations described in Equation (51), for each of the n-geometric configurations , a set of forces and moments, , can be obtained, composed by
where is the set of forces and the moment corresponding to the i-geometric configuration analyzed. In addition to guaranteeing that the proposed class 2 tensegrity robot is in an equilibrium geometric configuration, it must also be ensured that it fulfills the conditions of a tensegrity robot according to [2]. With this purpose, the forces and the moment that constitute the set must also satisfy the following conditions:
In this way, the set of joint coordinates , represented in (59), contains all the equilibrium geometric configurations of the proposed class 2 tensegrity robot.
3. Numerical Example
As a study case, it is proposed to find the set that contains the equilibrium configurations of the proposed class 2 tensegrity robot. The geometric specifications and initial conditions for the robot are shown in Table 2.
Table 2.
Form–finding parameters.
Substituting the data from Table 2 into (3)–(21), the coordinates of the points, M, , , , , , , , and for the proposed class 2 tensegrity robot shown in Figure 3, are obtained.
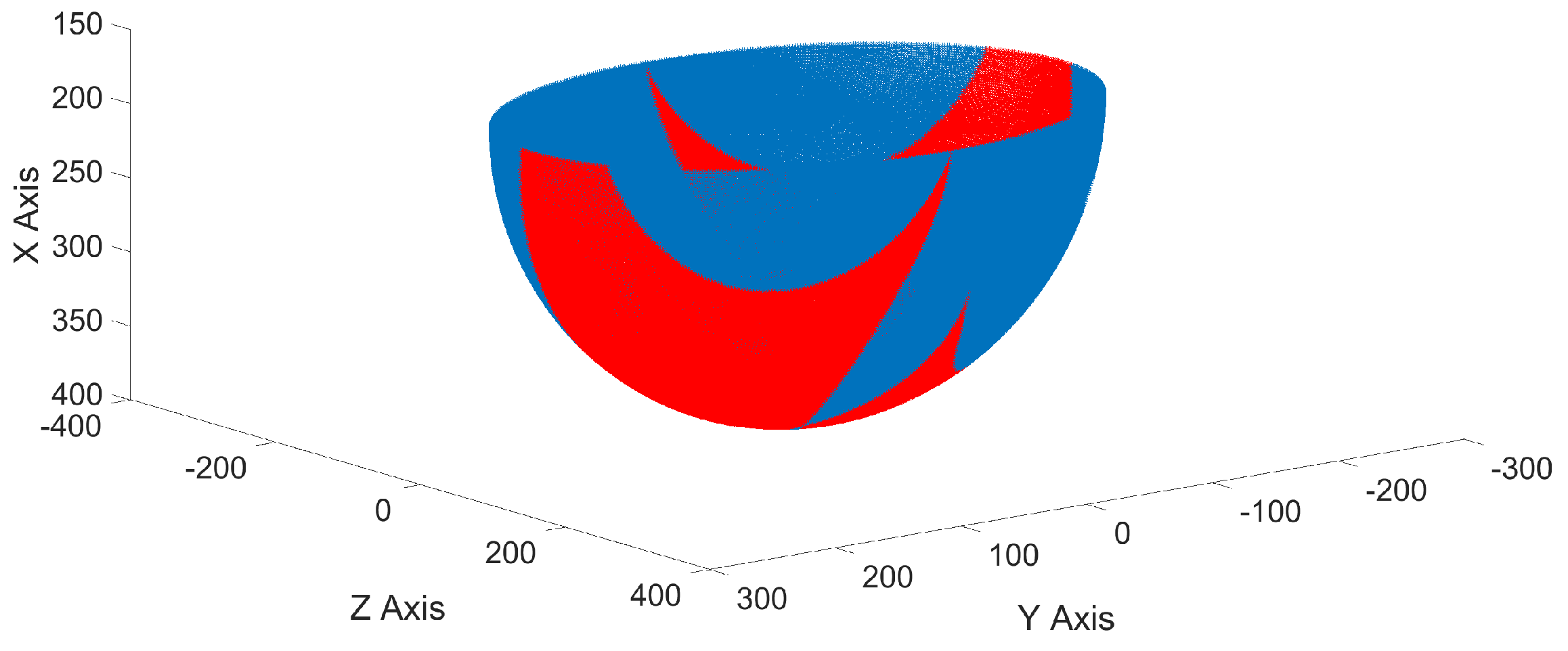
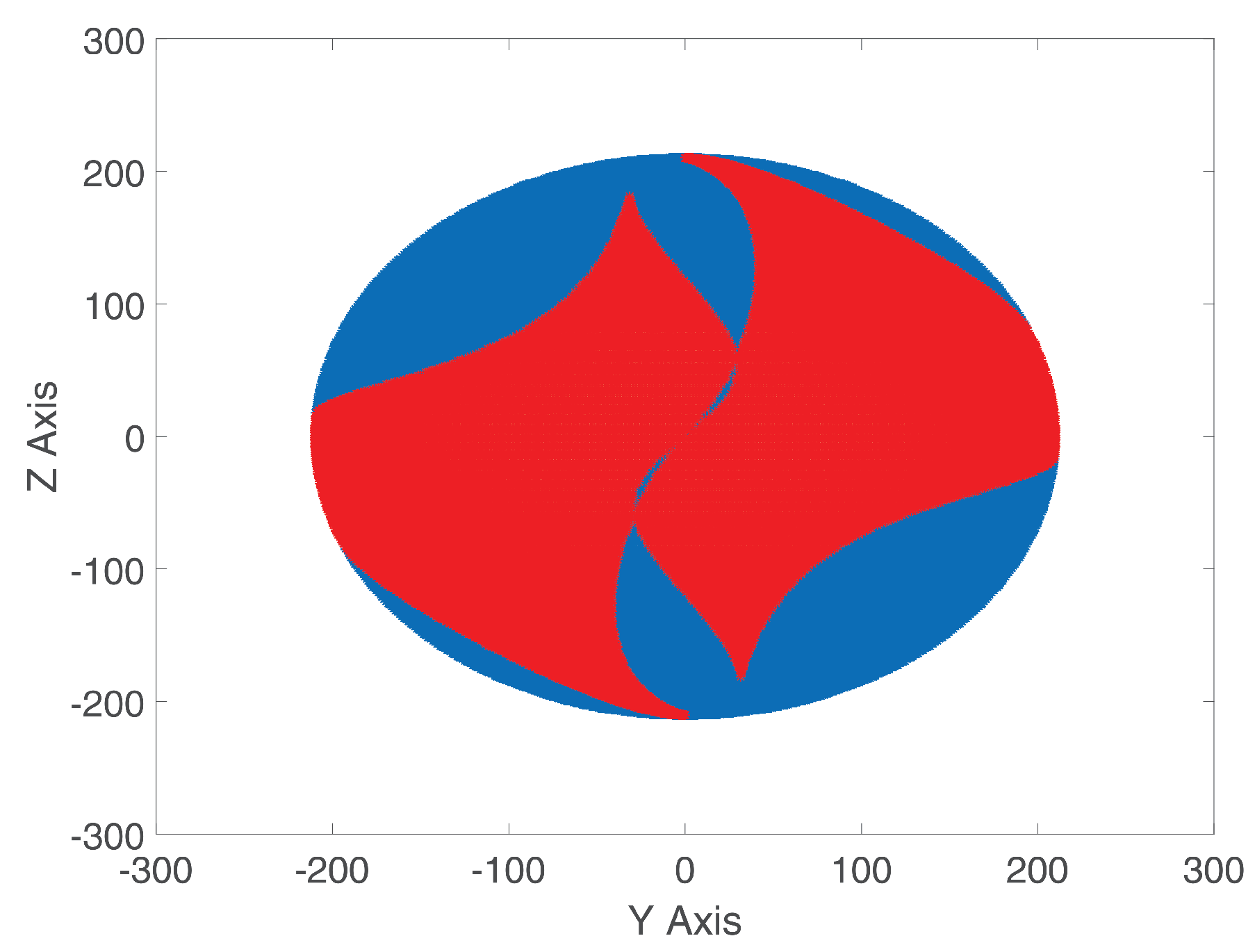
Evaluating (59) numerically with the data from Table 2 and the coordinates of the points shown in Figure 2, the matrix of points shown in Figure 8 is generated, where the blue points represent all possible geometric configurations of the proposed class 2 tensegrity robot, while the red dots represent all equilibrium geometric configurations that satisfy (51) and (58). Therefore, the red dots constitute the workspace of the proposed class 2 tensegrity robot.
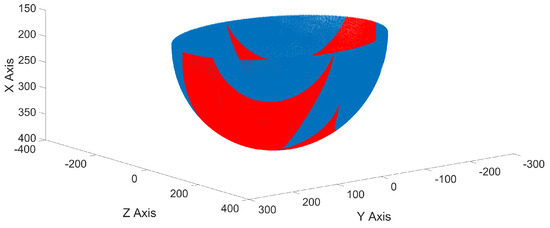
Figure 8.
Three-dimensional workspace of the proposed class 2 tensegrity robot.
Also, Figure 9 shows the geometric configurations analyzed in the Y–Z plane.
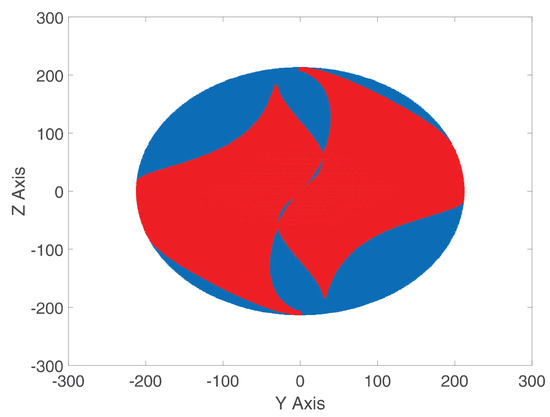
Figure 9.
Workspace in the Y–Z plane of the proposed class 2 tensegrity robot.
4. Numerical Experiments
This section compares the results of the numerical example with those obtained using software based on the finite element method, ANSYS®R18.2.
Consider four geometric configurations located within the workspace of the proposed class 2 tensegrity robot: equilibrium geometric configurations. Furthermore, they are arbitrarily selected on the workspace boundaries, whose values are shown in Table 3.
Table 3.
Arbitrarily selected positions.
To generate the kinematic and mechanical behavior of the mobile platform of the proposed class 2 tensegrity robot, the following elements are used:
- The BEAM188 element is used to represent the rigid bars of the robot as they are suitable elements to analyze thin structures in three dimensions. The BEAM188 element has two nodes and six degrees of freedom at each node.
- The COMBIN14 element is used to represent both the wire segments , with and , and the tension springs and . The COMBIN14 element is suitable for modeling bodies subjected to uniaxial tension–compression loads. With proper constraints, the COMBIN14 element, having three degrees of freedom per node, is also used to represent combined spring-damper systems.
All types of elements used for discretizing the mobile platform and the flexible elements of the class 2 tensegrity robot in the simulation carried out in the commercial software ANSYS®R18.2 are shown in Table 4.
Table 4.
Types of elements.
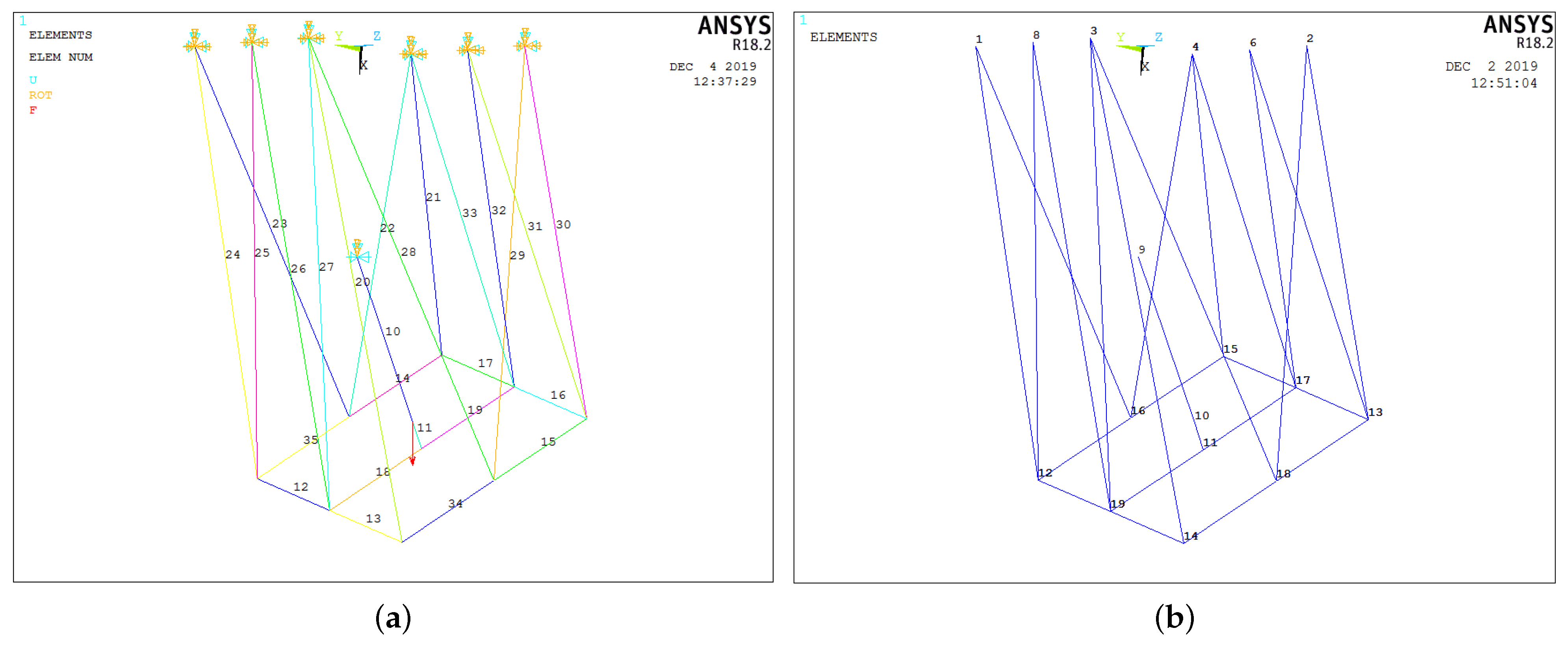
The information in Table 4 is shown graphically in Figure 10a. Figure 10b shows the nodes corresponding to the discretized elements. Nodes 1–8 represent the union of the flexible elements with the rigid base of the robot, and they are constrained both in translation and rotation in the three axes. Node 9 represents the universal joint whose boundary conditions restrict translation in the three axes as well as rotation about the x-axis. Node 10 represents the centroid of the mobile platform where the resultant of the external forces corresponding to gravity is applied. Nodes 11–19 are declared with no constraints or external forces applied to them.
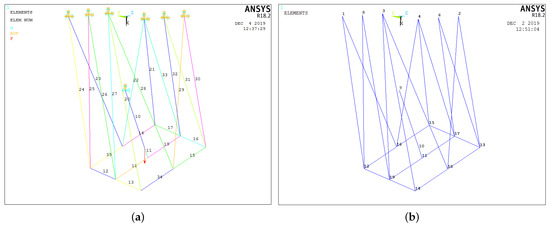
Figure 10.
Class 2 tensegrity robot model in ANSYS®R18.2. (a) Element type. (b) Node numbering.
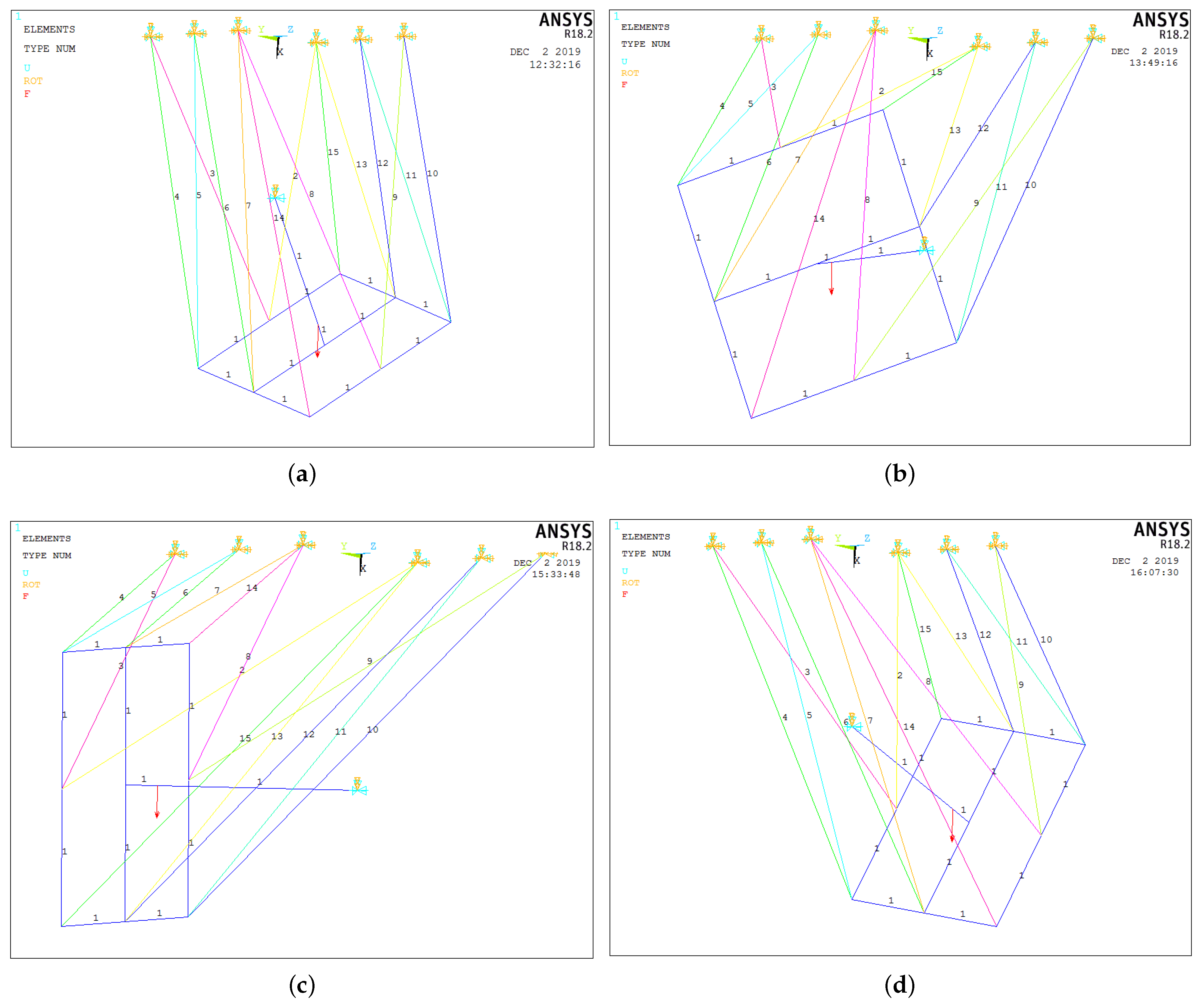
Figure 11 shows the geometric configurations adopted by the platform of the robot corresponding to the joint coordinates listed in Table 3.
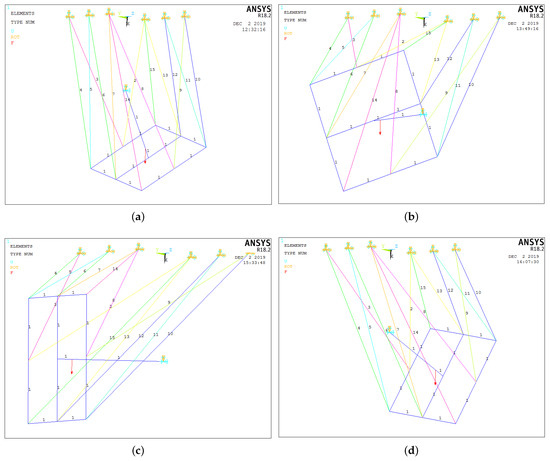
Figure 11.
Geometric configurations analyzed. (a) Experiment 1. (b) Experiment 2. (c) Experiment 3. (d) Experiment 4.
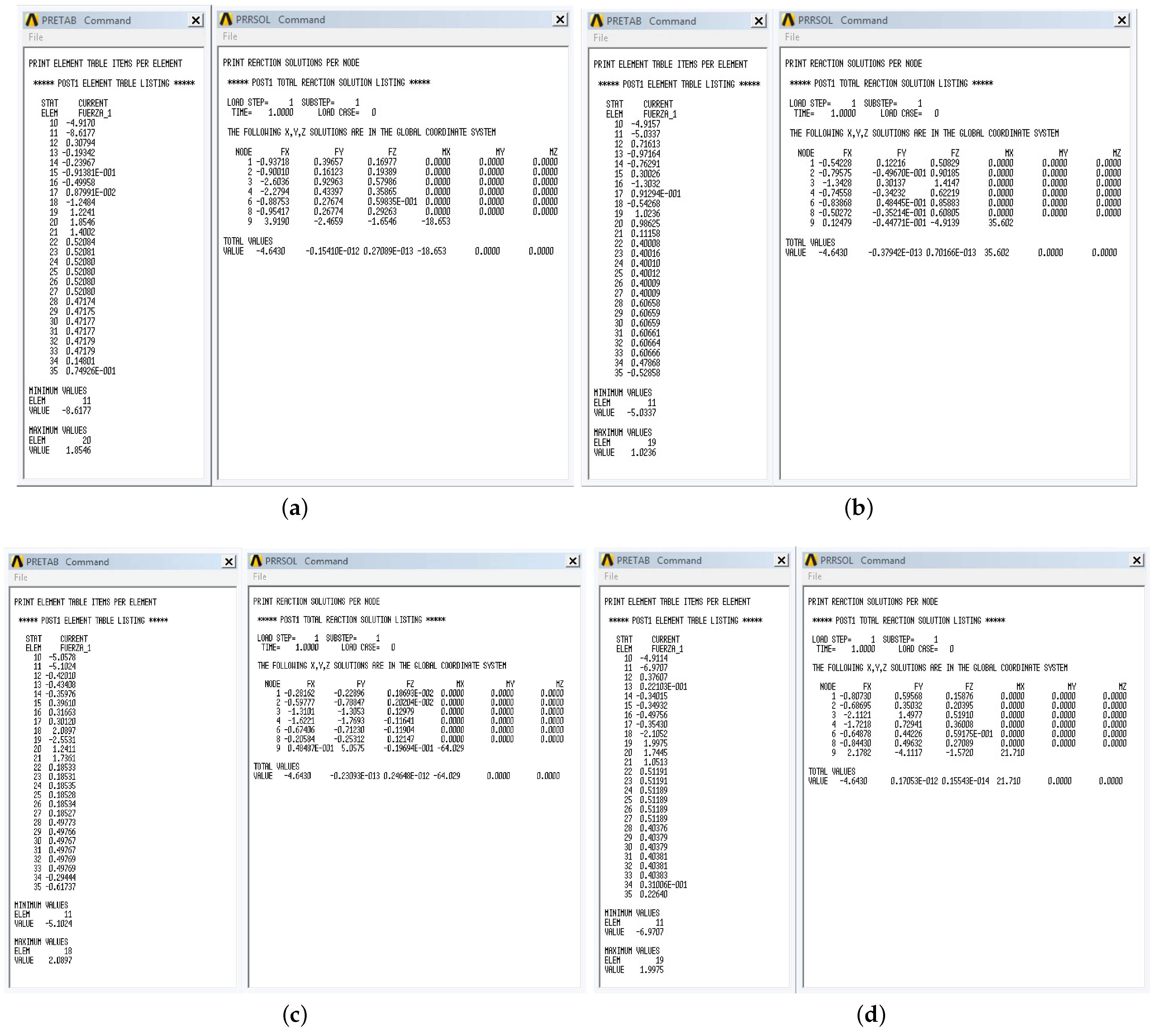
Screenshots of the static analysis results obtained using the software ANSYS®R18.2 are shown in Figure 12.
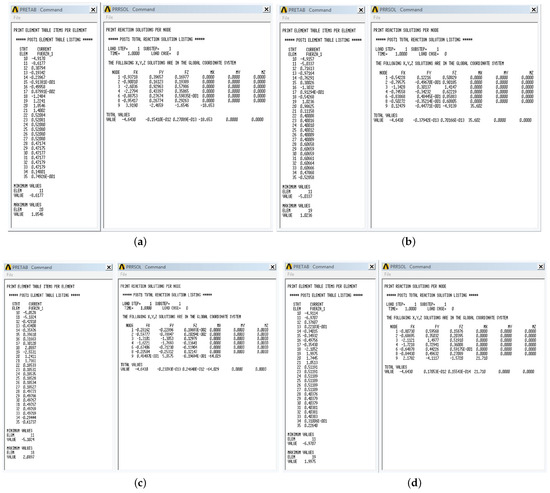
Figure 12.
Static analysis results obtained from ANSYS®R18.2. (a) Experiment 1. (b) Experiment 2. (c) Experiment 3. (d) Experiment 4.
Moreover, Table 5 shows the comparison between the magnitudes of the forces, , , , , , and , obtained analytically, and the magnitudes of the same forces resulting from the simulation in the ANSYS®R18.2 software, corresponding to the four selected geometric configurations.
Table 5.
Comparison between analytical and software results.
It has to be noted that the errors of the analytical and experimental results of ANSYS® R18.2 are relatively small, so it is guaranteed that the equilibrium geometric configurations obtained satisfy the equilibrium conditions and the conditions that a tensegrity robot must fulfill.
5. Conclusions
In this paper, a hypothesis is presented where it is stated that, by increasing the number of interactions between the flexible elements formed by the cables with variable length, and , and the rigid elements of the soft robot applied to a class 2 tensegrity robot, integrated by the mobile platform and the fixed base, as a consequence, there would be an increase in the number of equilibrium geometric configurations for the robot presented in [13]. For this purpose, a redesign of the configuration of the flexible elements in the class 2 tensegrity robot presented in [13] was proposed, remaining as shown in Figure 2. Subsequently, the proposed class 2 tensegrity robot was analyzed using the same methodology described in [13] to determine all the equilibrium geometric configurations of the robot, thus defining the workspace shown in Figure 8.
For the class 2 tensegrity robot presented in [13], it was determined that its workspace is composed of 215 equilibrium geometric configurations. Similarly, for the proposed class 2 tensegrity robot, it was found that the workspace, shown in Figure 8, comprises 50,223 equilibrium geometric configurations, representing an increase of 23,360% in the number of equilibrium geometric configurations. The significant increase in the workspace incurred by the class 2 tensegrity robot when integrating the modification in the interaction between the flexible and rigid elements allows for corroborating the hypothesis stated at the beginning of this research.
To verify the stability of the equilibrium geometric configurations found using the abovementioned technique, the software ANSYS®, based on finite element theory, was used to perform a series of numerical experiments. The results obtained showed that the analyzed geometric configurations constitute equilibrium geometric configurations that meet the definition of a tensegrity system [2]. Furthermore, the hypothesis of this manuscript was proved by numerical experiments; that is, the authors demonstrated that using the novel technique is an alternative to increasing the effective workspace in the class 2 tensegrity robot, which is different from the methods employed in [6,7,8,9,10,11,12], where their strategies were based on the concatenation of elementary tensegrity structures to increase the effective workspace and, consequently, the applications.
In future work, a mathematical model capable of describing the relationship between interaction points and geometric equilibrium configurations is planned. This model will consider variables such as point locations, inclination of flexible elements, and rigidity of said elements, among others.
Author Contributions
G.I.P.-S.: Methodology, Investigation, Formal Analysis. K.A.C.-G.: Methodology, Investigation, Writing—Review and Editing. J.R.-R.: Methodology, Investigation, Writing—Review and Editing. C.G.M.-P.: Conceptualization, Investigation, Formal Analysis, Writing—Review. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Buckminster Fuller, R.; Applewhite, E.J. Synergetics, Explorations in the Geometry of Thinking; Macmillan Publishing Co. Inc.: New York, NY, USA, 1975; ISBN 0-02-065320-4. [Google Scholar]
- Pugh, A. An Introduction to Tensegrity; University of California Press: Los Angeles, CA, USA, 1976; ISBN 0-520-02996-8. [Google Scholar]
- Peng, Y.; Sakai, Y.; Nakagawa, K.; Funabora, Y.; Aoyama, T.; Yokoe, K.; Doki, S. Funabot-Suit: A bio-inspired and McKibben muscle-actuated suit for natural kinesthetic perception. Biomim. Intell. Robot. 2023, 3, 100127. [Google Scholar] [CrossRef]
- Mao, Z.; Peng, Y.; Hu, C.; Ding, R.; Yamada, Y.; Maeda, S. Soft computing-based predictive modeling of flexible electrohydrodynamic pumps. Biomim. Intell. Robot. 2023, 3, 100114. [Google Scholar] [CrossRef]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, Z.; Xu, M.; Mai, J.; Wang, Q. Low-Complexity Output Feedback Control With Prescribed Performance for Bioinspired Cable-Driven Actuator. IEEE ASME Trans. Mechatron. 2023, 1–12. [Google Scholar] [CrossRef]
- Begey, J.; Vedrines, M.; Andreff, N.; Renaud, P. Selection of actuation mode for tensegrity mechanisms: The case study of the actuated Snelson cross. Mech. Mach. Theory 2020, 152, 103881. [Google Scholar] [CrossRef]
- Ikemoto, S.; Tsukamoto, K.; Yoshimitsu, Y. Development of a Modular Tensegrity Robot Arm Capable of Continuous Bending. Front. Robot. 2021, 8, 774253. [Google Scholar] [CrossRef]
- Yeshmukhametov, A.; Koganezawa, K. A Simplified Kinematics and Kinetics Formulation for Prismatic Tensegrity Robots: Simulation and Experiments. Robotics 2023, 12, 56. [Google Scholar] [CrossRef]
- Jin, Y.; Yang, Q.; Liu, X.; Lian, B.; Sun, T. Type synthesis of worm-like planar tensegrity mobile robot. Mech. Mach. Theory 2024, 191, 105476. [Google Scholar] [CrossRef]
- Carreño, F.; Post, M.A. Design of a novel wheeled tensegrity robot: A comparison of tensegrity concepts and a prototype for travelling air ducts. Robot. Biomim. 2017, 5, 1. [Google Scholar] [CrossRef]
- Zappetti, D.; Jeong, S.H.; Shintake, J.; Floreano, D. Phase Changing Materials-Based Variable-Stiffness Tensegrity Structures. Soft Robot. 2020, 7, 362–369. [Google Scholar] [CrossRef] [PubMed]
- Manríquez-Padilla, C.G.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Crane, C.D. Development and Kinematic Position Analysis of a Novel Class 2 Tensegrity Robot. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Skelton, R.E.; De Oliveira, M.C. Tensegrity Systems; Springer: New York, NY, USA, 2009; ISBN 978-0-387-74241-0. [Google Scholar]
- Lee, S.; Lieu, Q.X.; Vo, T.P.; Lee, J. Deep Neural Networks for Form-Finding of Tensegrity Structures. Mathematics 2022, 10, 1822. [Google Scholar] [CrossRef]
- Yuan, Y.-F.; Ma, S.; Jiang, S.-H. Form-finding of tensegrity structures based on the Levenberg–Marquardt method. Comput. Struct. 2017, 192, 171–180. [Google Scholar] [CrossRef]
- Song, K.; Scarpa, F.; Schenk, M. Form-finding of tessellated tensegrity structures. Eng. Struct. 2022, 252, 113627. [Google Scholar] [CrossRef]
- Zhang, P.; Zhou, J.; Chen, J. Form-finding of complex tensegrity structures using constrained optimization method. Compos. Struct. 2021, 268, 113971. [Google Scholar] [CrossRef]
- Uzun, F. Form-finding of free-form tensegrity structures by genetic algorithm–based total potential energy minimization. Adv. Struct. Eng. 2017, 20, 784–796. [Google Scholar] [CrossRef]
- Manríquez-Padilla, C.G.; Zavala-Pérez, O.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Camarillo-Gómez, K.A. Form-Finding Analysis of a Class 2 Tensegrity Robot. Appl. Sci. 2019, 9, 2948. [Google Scholar] [CrossRef]
- Hartenberg, R.S.; Denavit, J. A kinematic notation for lower-pair mechanisms based on metrics. J. Appl. Mech. 1955, 2, 215–221. [Google Scholar] [CrossRef]
- Liu, Y.; Bi, Q.; Yue, X.; Wu, J.; Yang, B.; Li, Y. A review on tensegrity structures-based robots. J. Mechmachtheory 2022, 168, 104571. [Google Scholar] [CrossRef]
- Kahn, M.E.; Roth, B. The Near-Minimum-Time Control Of Open-Loop Articulated Kinematic Chains. J. Dyn. Syst. Meas. Control. 1971, 93, 164–172. [Google Scholar] [CrossRef]
- Jazar, R.N. Theory of Applied Robotics: Kinematics, Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2010; ISBN 978-1-4419-1749-2. [Google Scholar]
- Beer, F.P.; Johnston, E.R.; Mazurek, D.F.; Eisenberg, E.R. Mecánica Vectorial para Ingenieros: Estática, 12th ed.; Mc. Graw Hill: Ciudad de México, Mexico, 2021; ISBN 1456287605. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).