
MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring


Abstract
1. Introduction
2. Materials and Methods
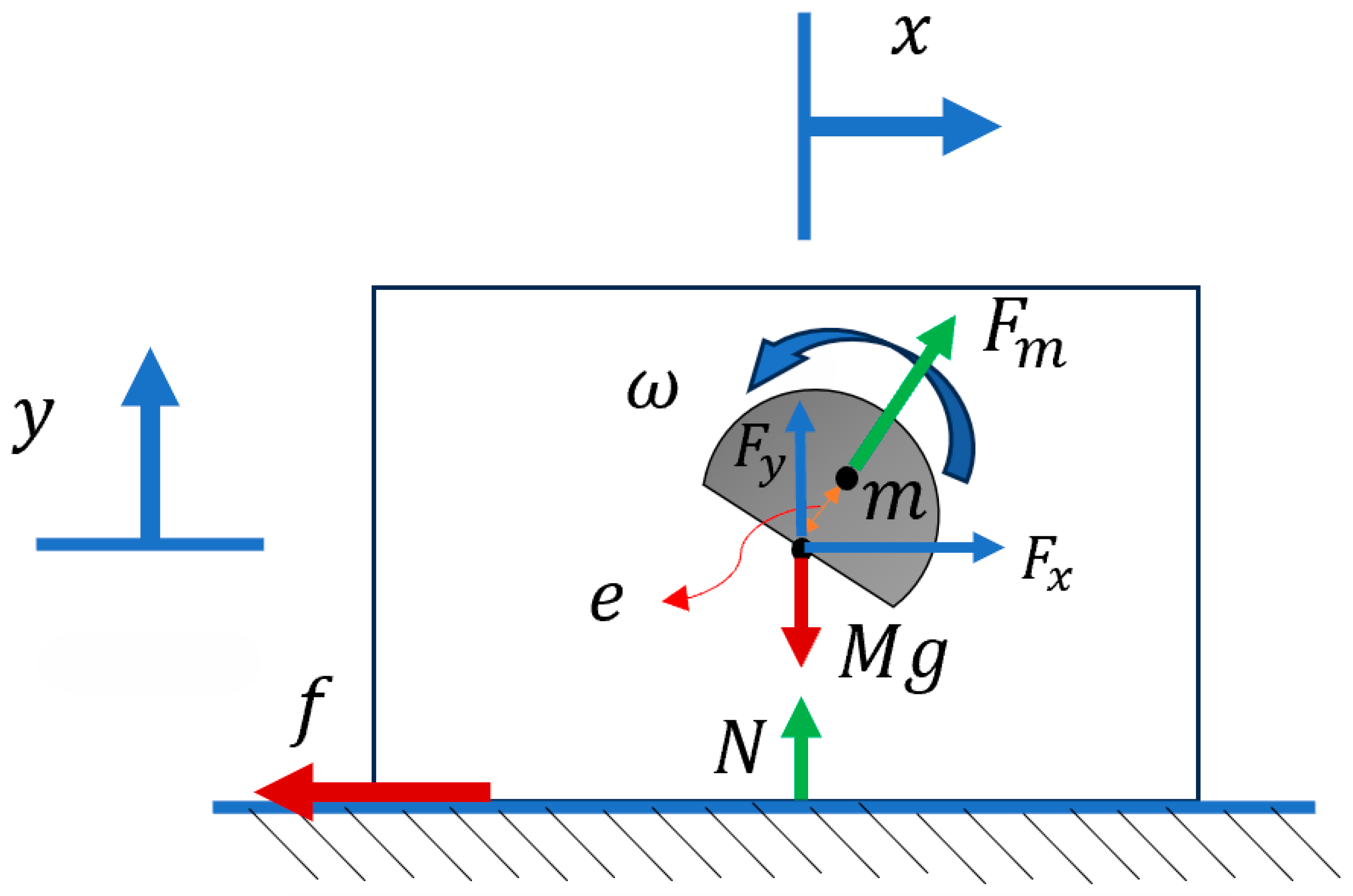
2.1. Dynamics
- The curved legs of the microrobots were considered to be massless rigid links with torsional springs connected to the body.
- The body of the microrobot system was considered a rigid body.
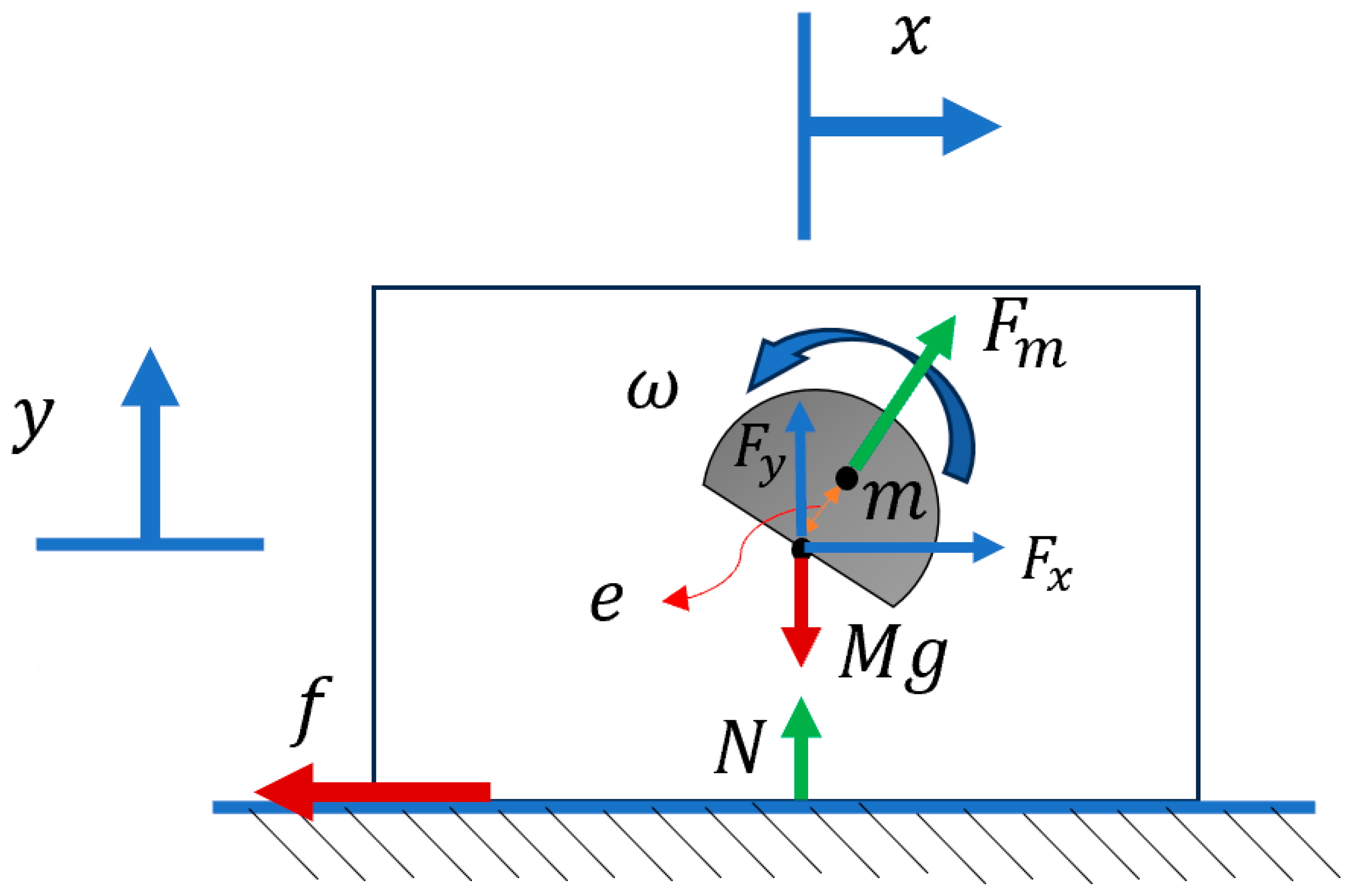
2.1.1. Case 1: Eccentric Mass on a Two-DOF System
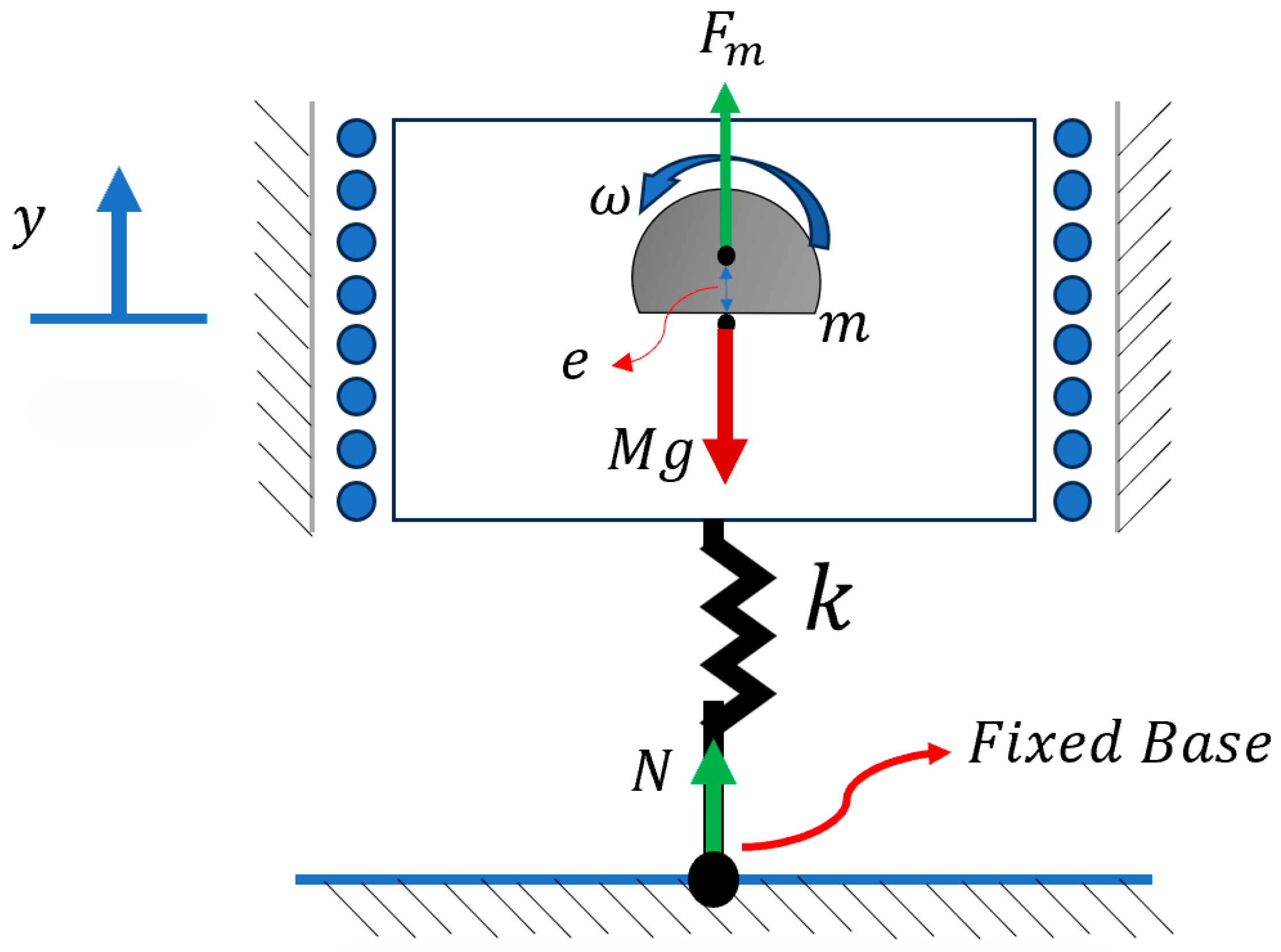
2.1.2. Case 2: Eccentric Mass on a Spring
2.1.3. Case 3: Bristle-Bot with Eccentric Mass Mounted with an Offset
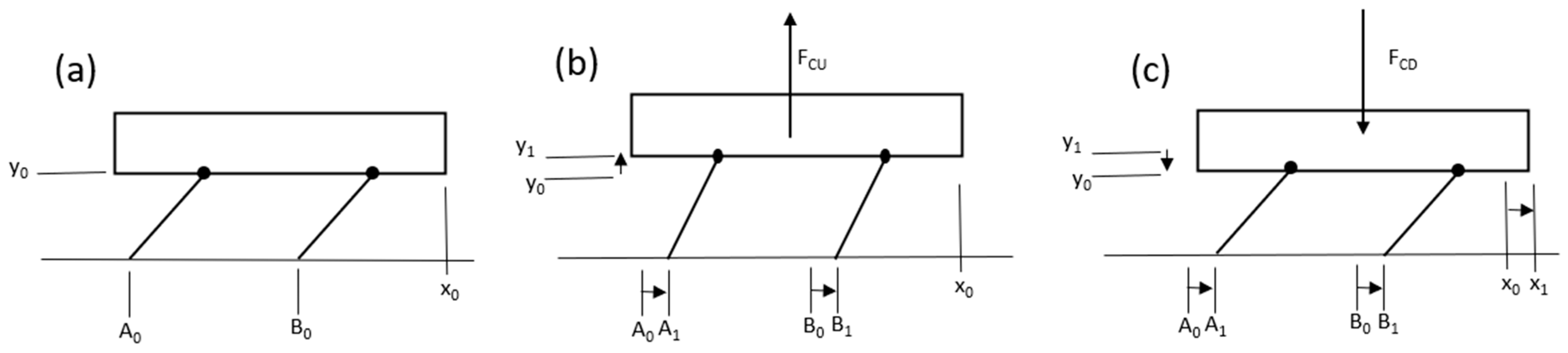
2.1.4. Case 4: Bristle-Bot with Jumping Feet
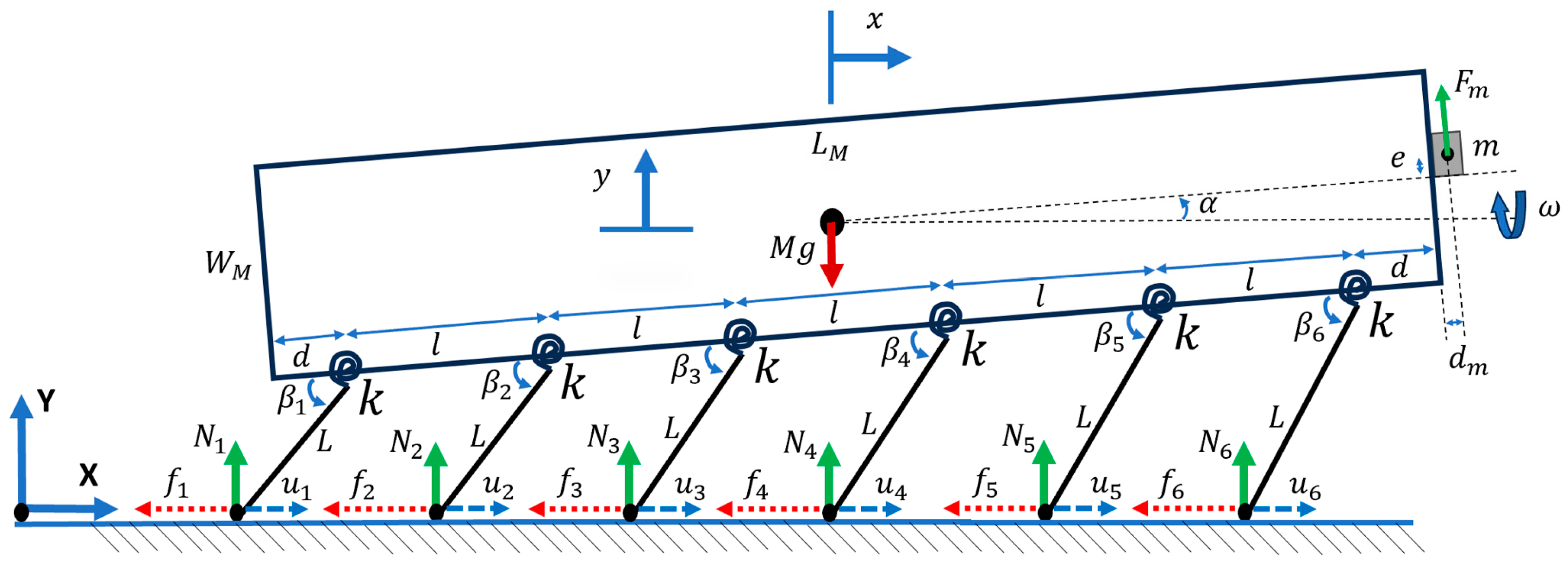
2.1.5. Case 5: Microrobot with Pitching Angle
2.1.6. Case 6: Microrobot with Centrifugal Yaw Steering
2.2. Development
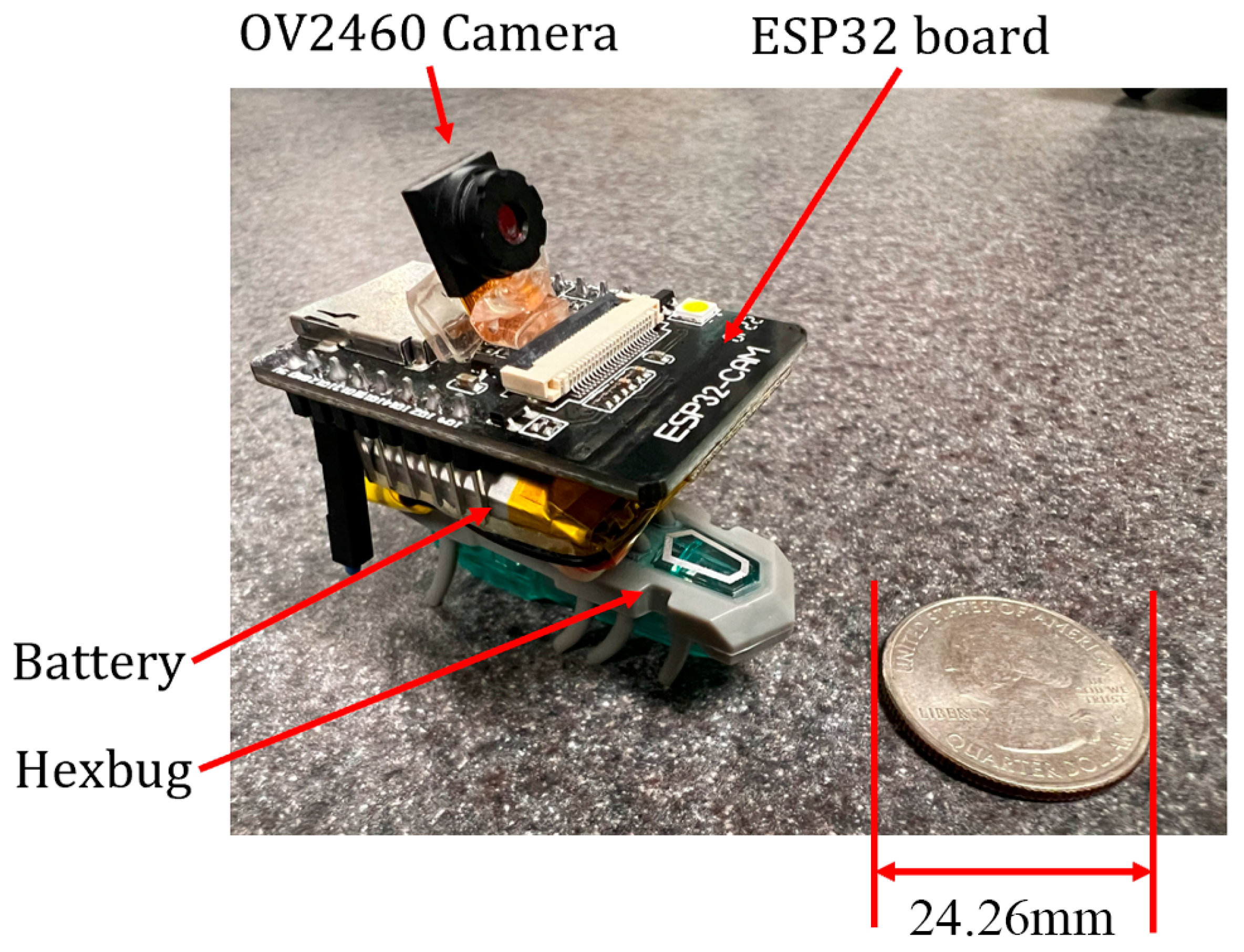
2.2.1. ESP32-CAM Mounted on HEXBUG-Nano
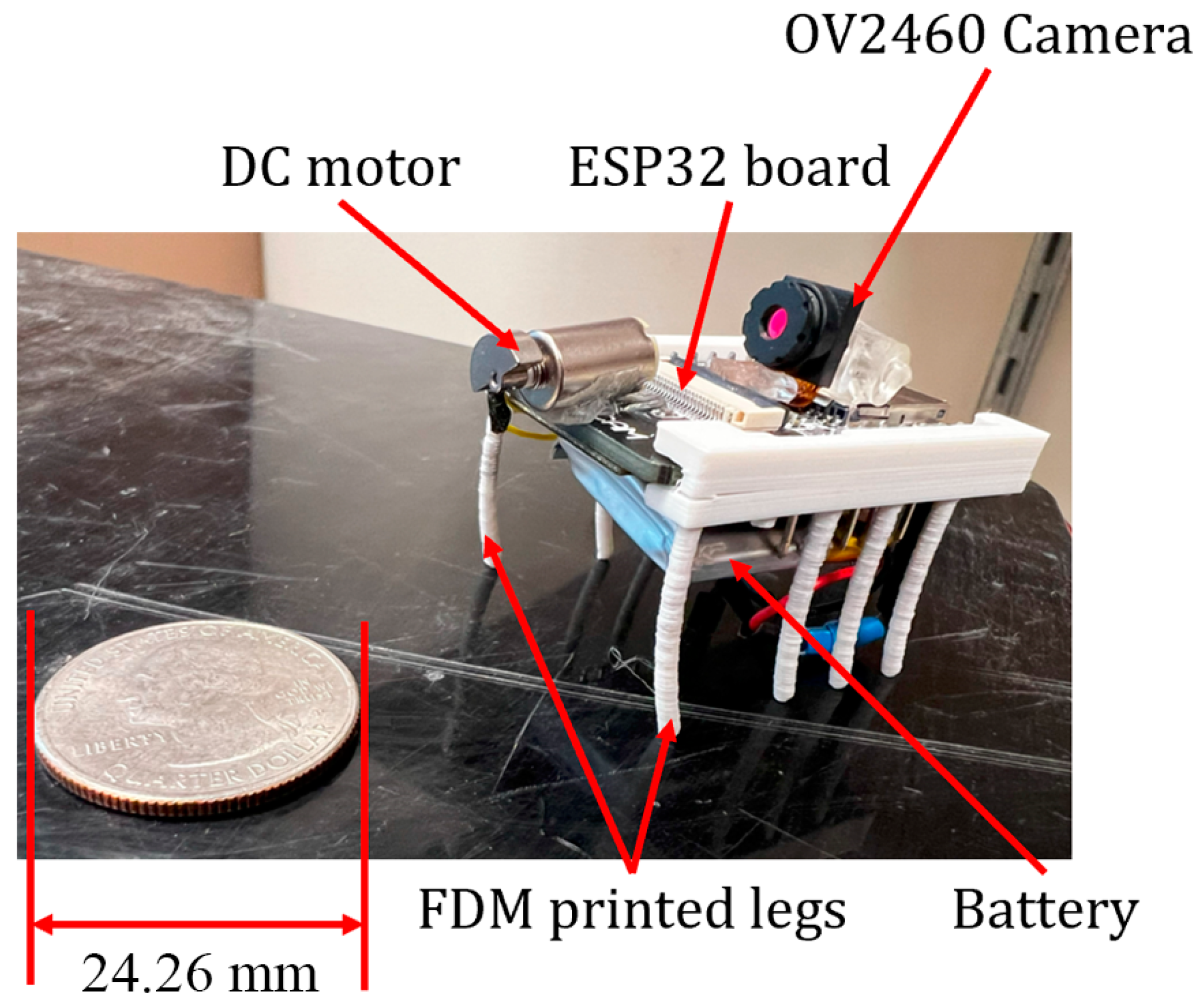
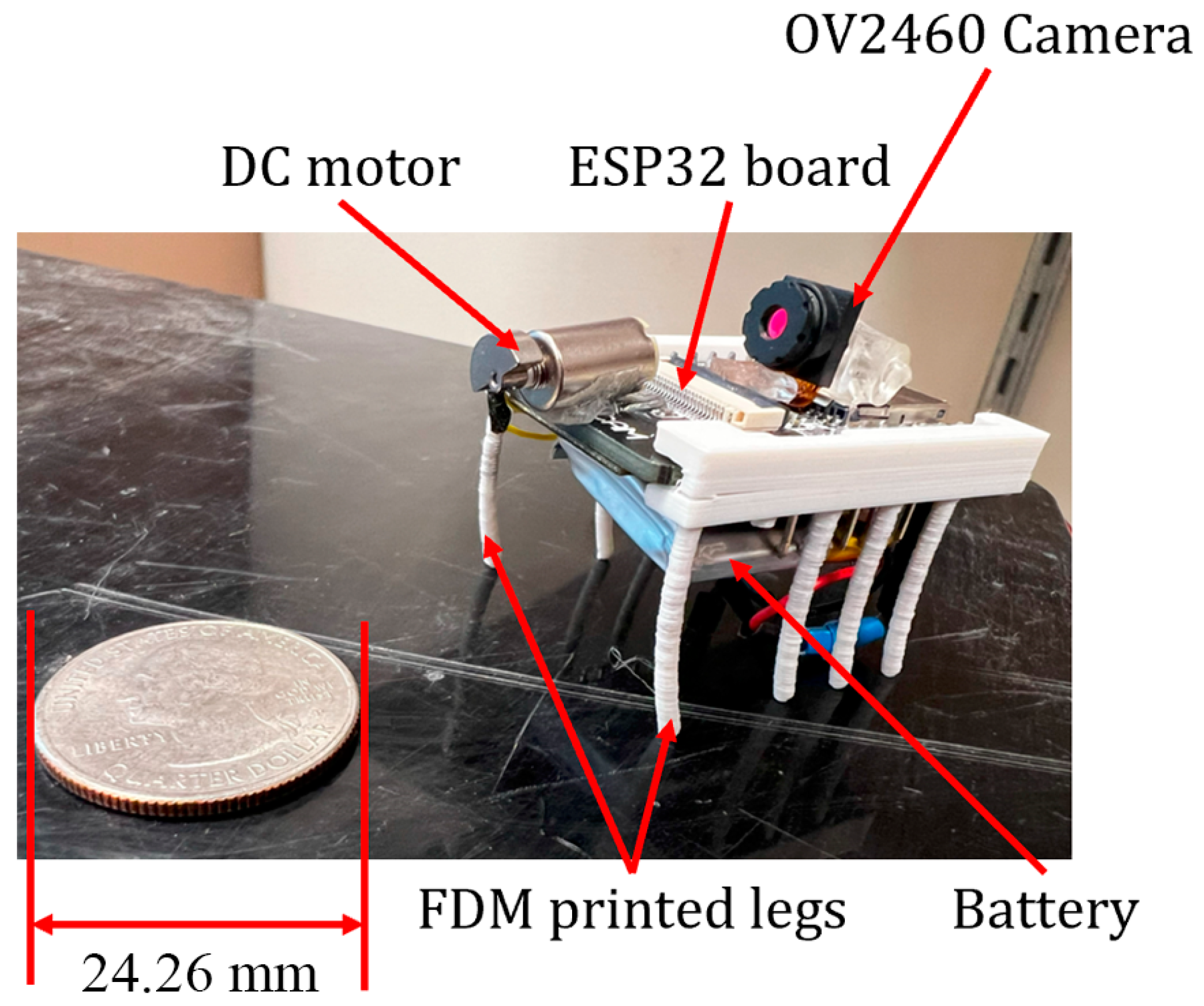
2.2.2. Microrobot Fabrication with Fused Deposition Modeling (FDM)
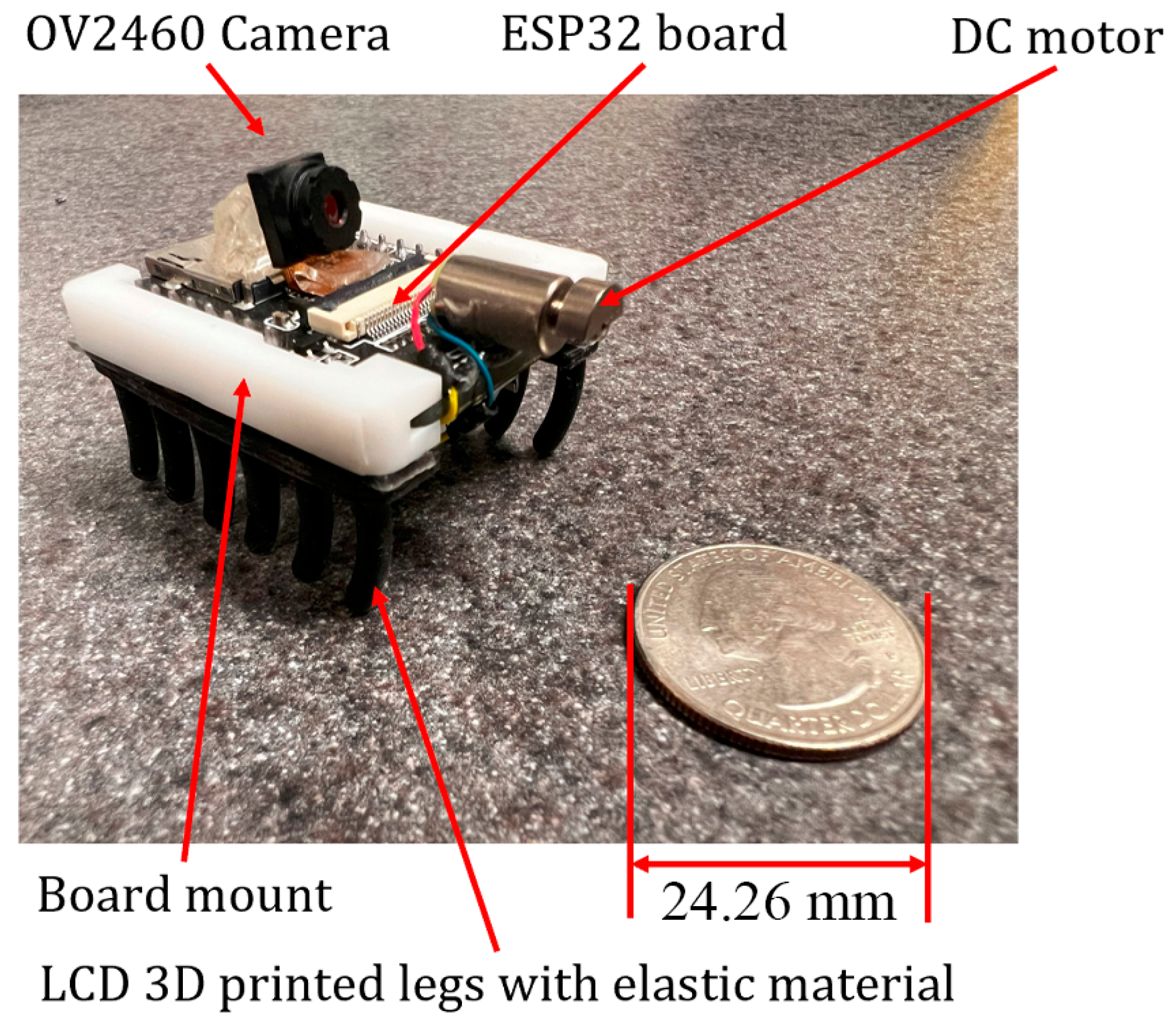
2.2.3. Microrobot Fabrication with Silicone Molding
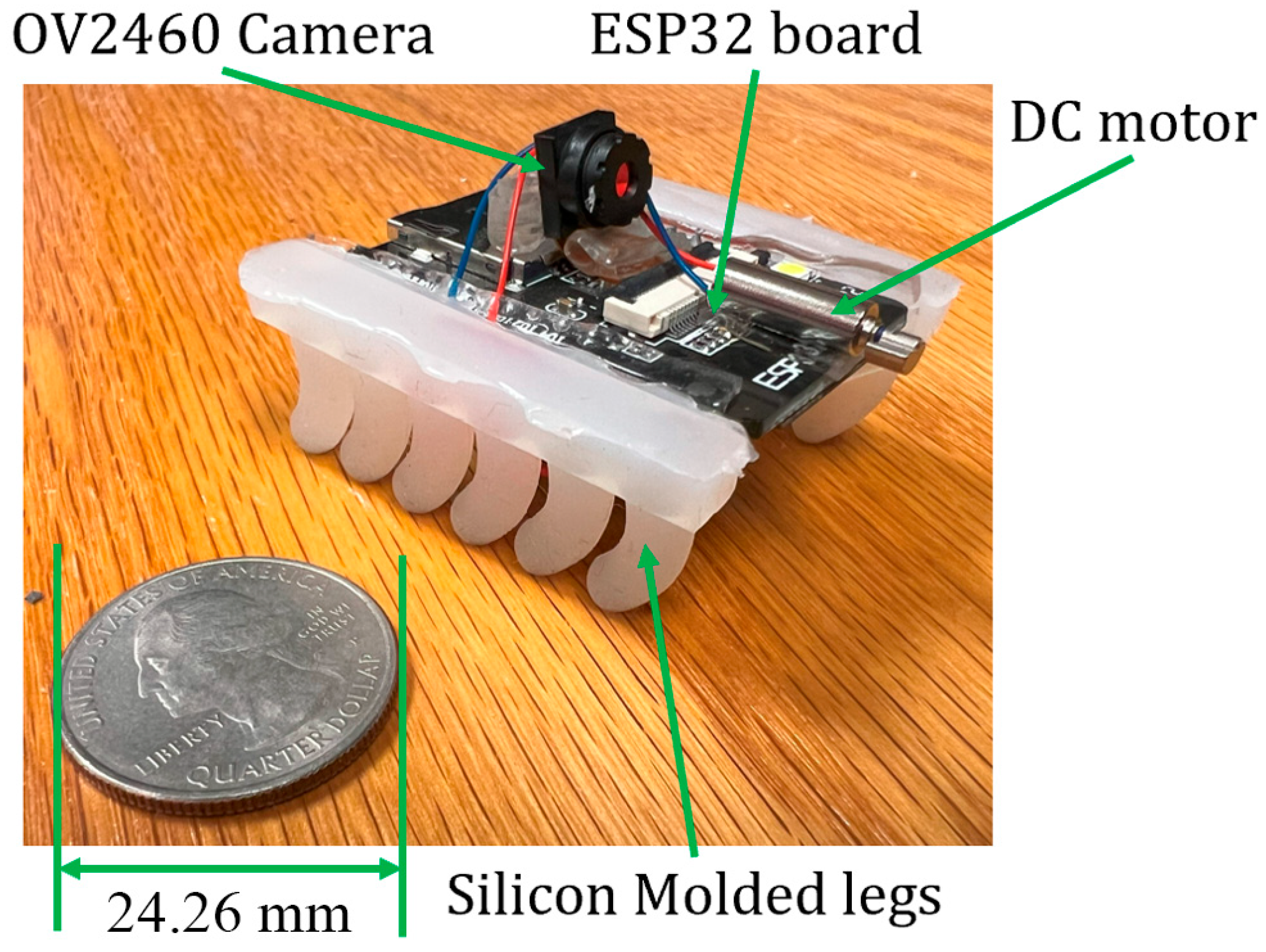
2.2.4. MARSBot
2.3. Control Interface
2.3.1. PC Interface
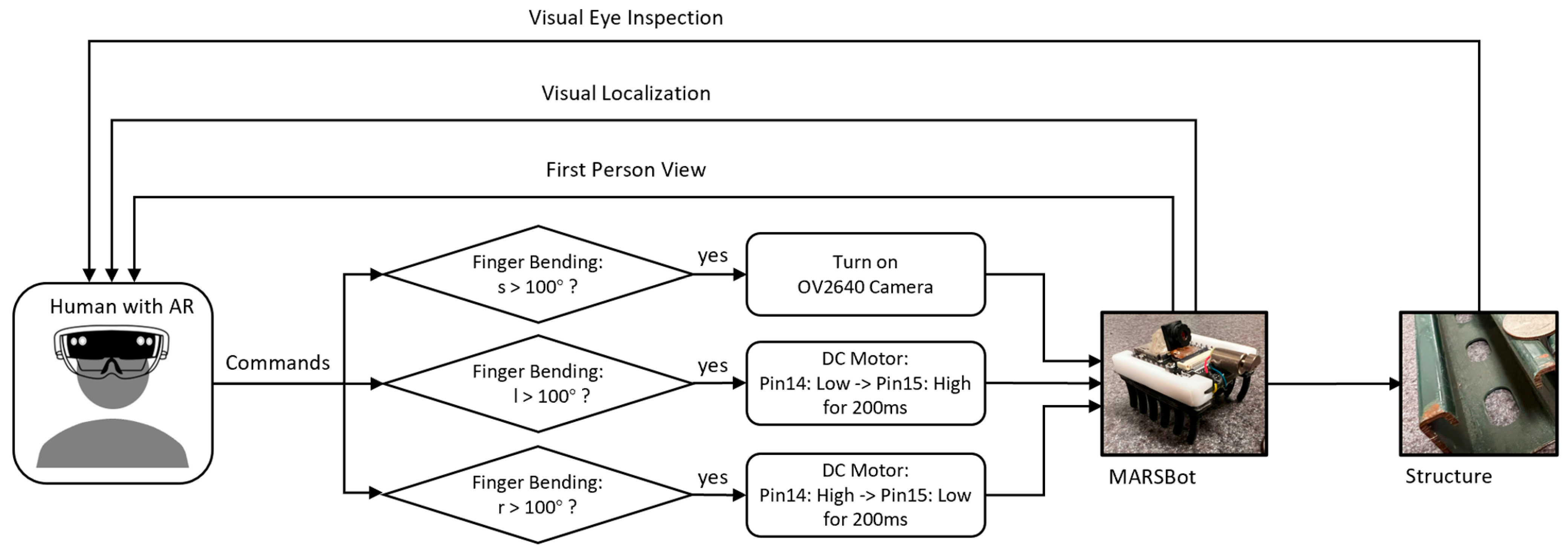
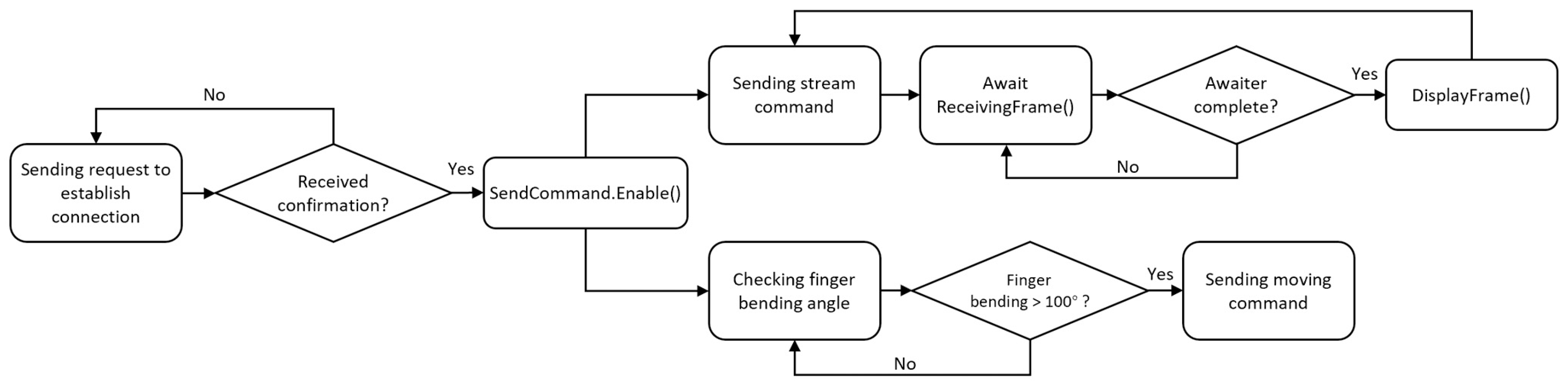
2.3.2. Augmented Reality Interface
3. Results
3.1. Prototypes
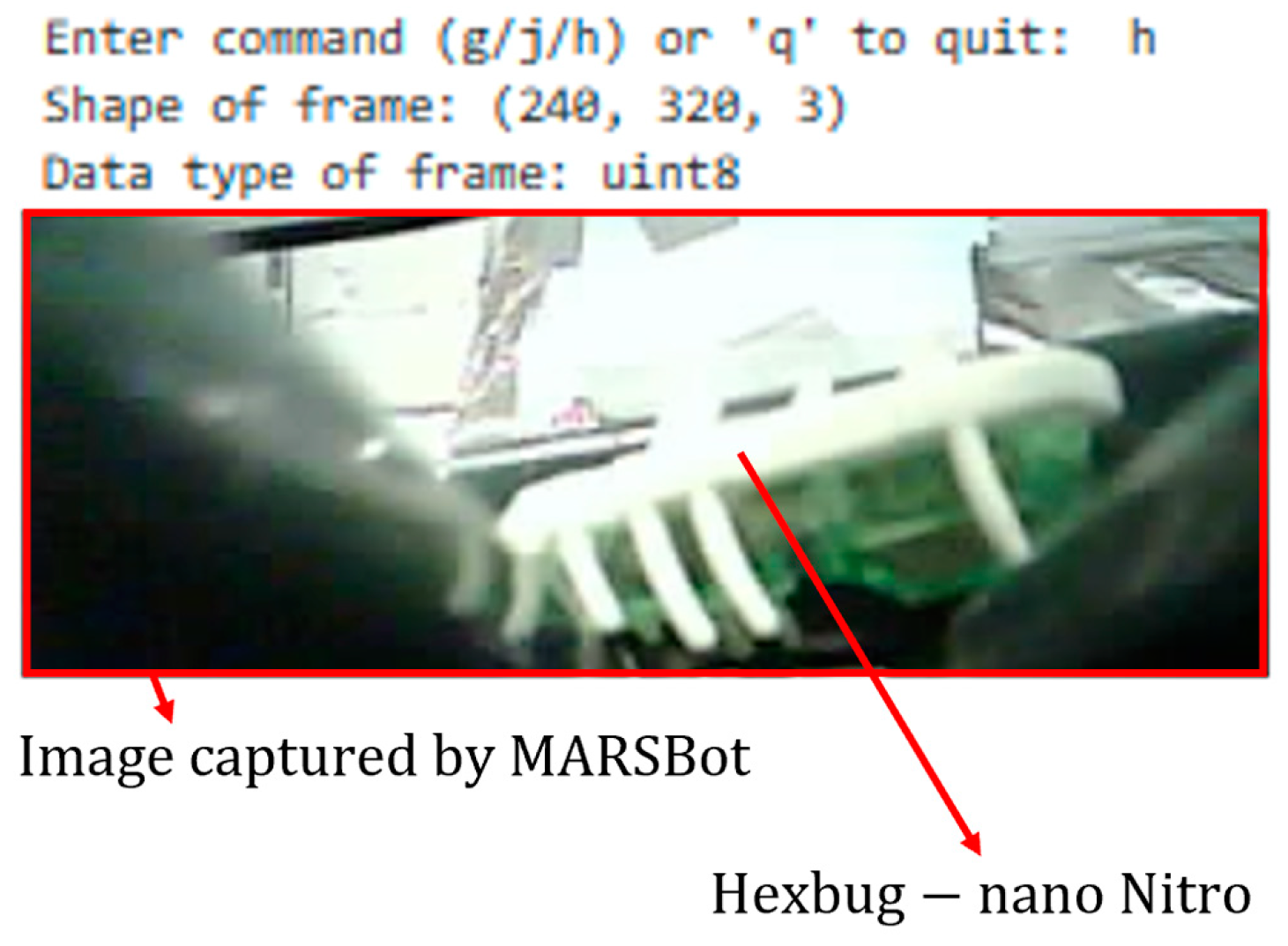
3.1.1. ESP32-CAM Mounted on HEXBUG-Nano
3.1.2. Microrobot with Extrusion-Based 3D-Printed Legs
3.1.3. Microrobot with Silicone-Molded Legs
3.1.4. MARSBot
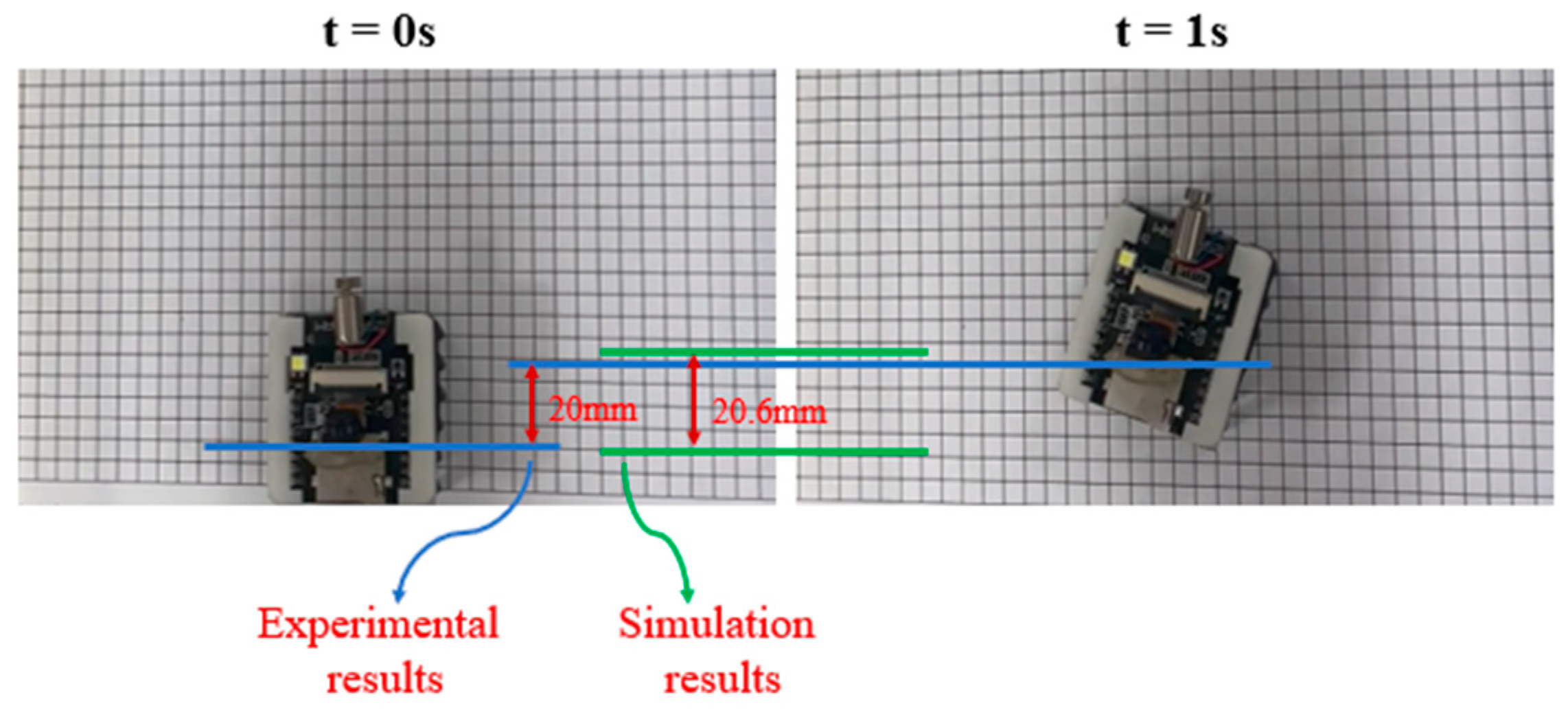
3.2. Simulation
3.2.1. Parameters
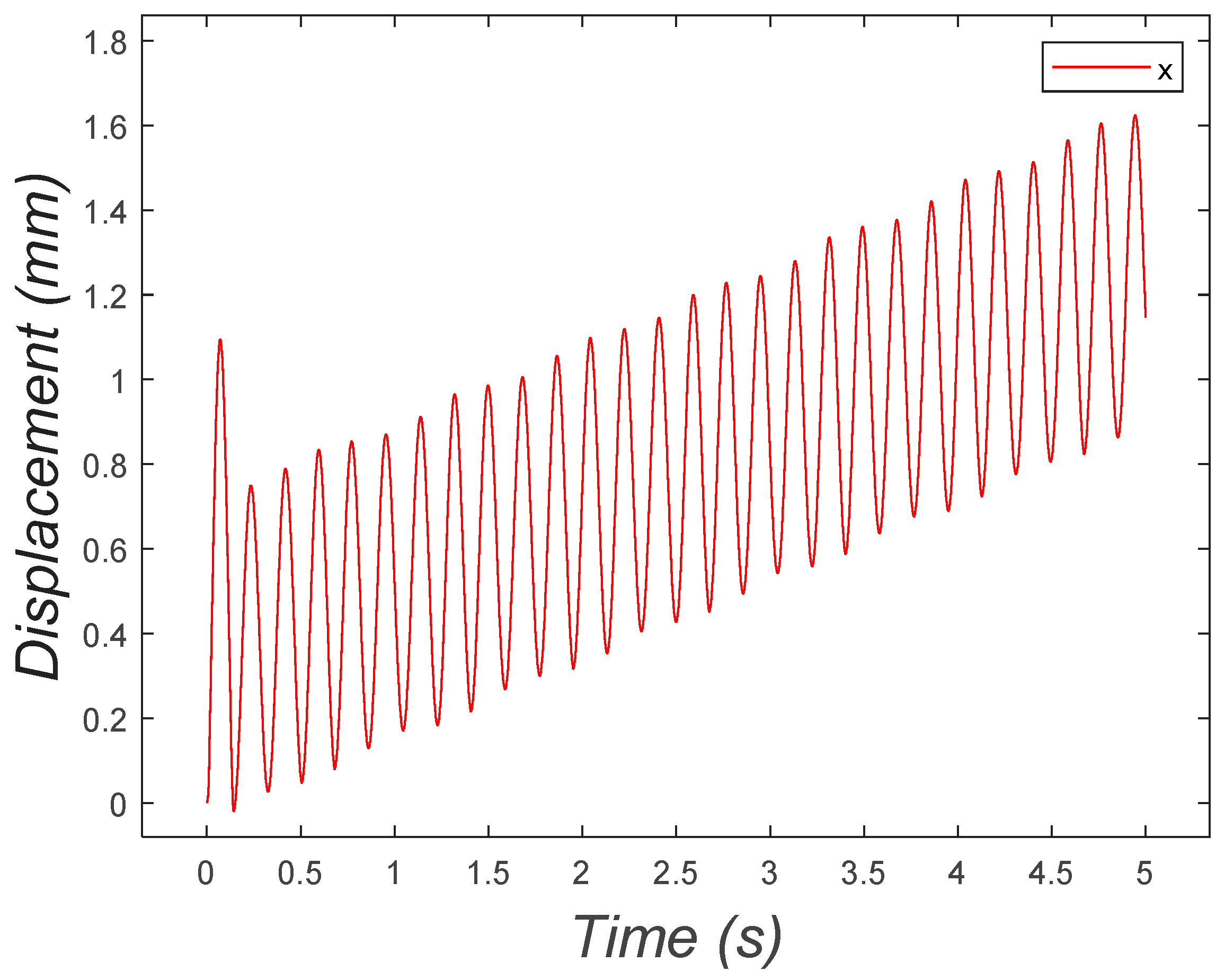
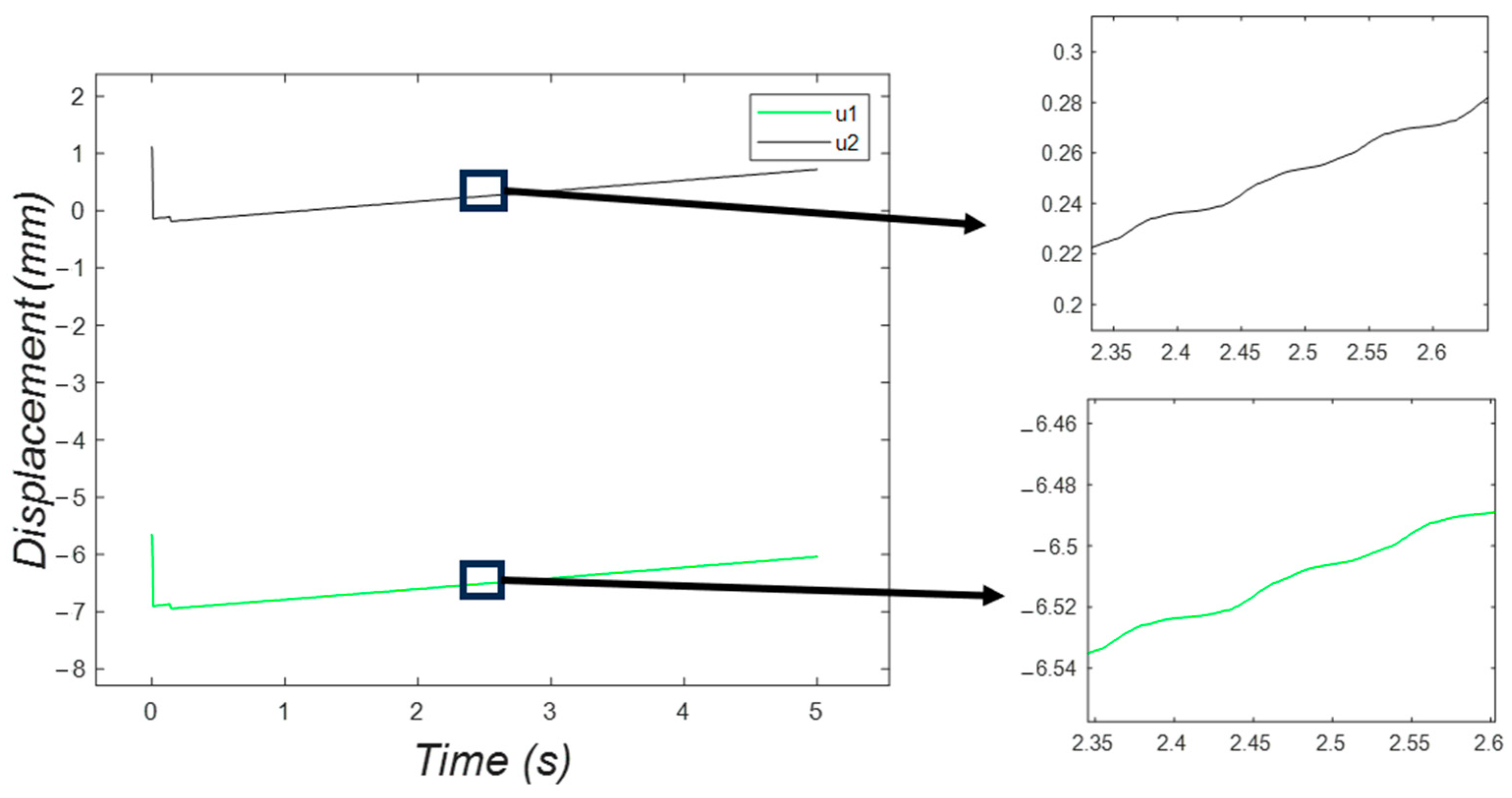
3.2.2. Simulation of Case 1
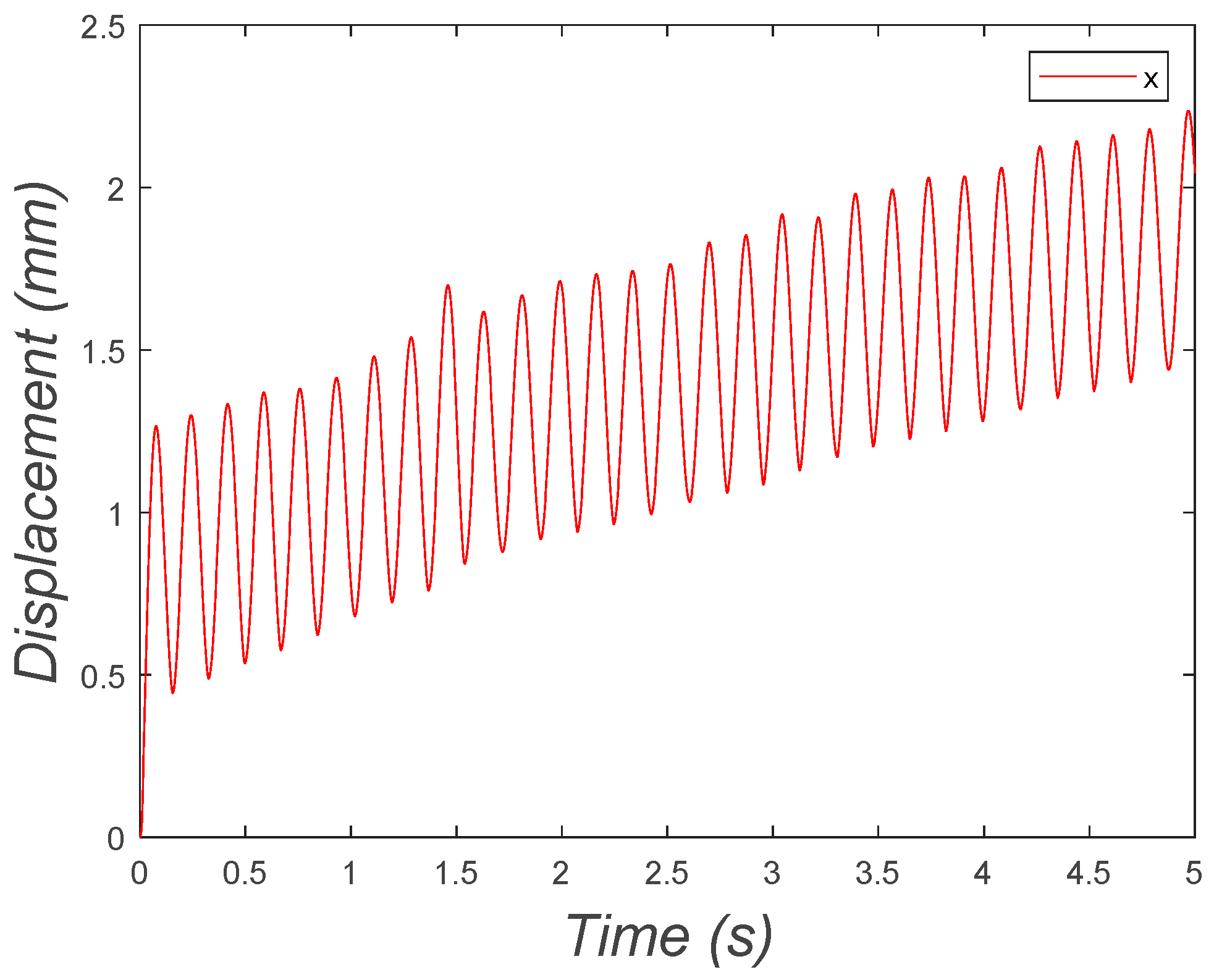
3.2.3. Simulation of Case 2
3.2.4. Simulation of Cases 3 and 4
3.2.5. Simulation of Case 5
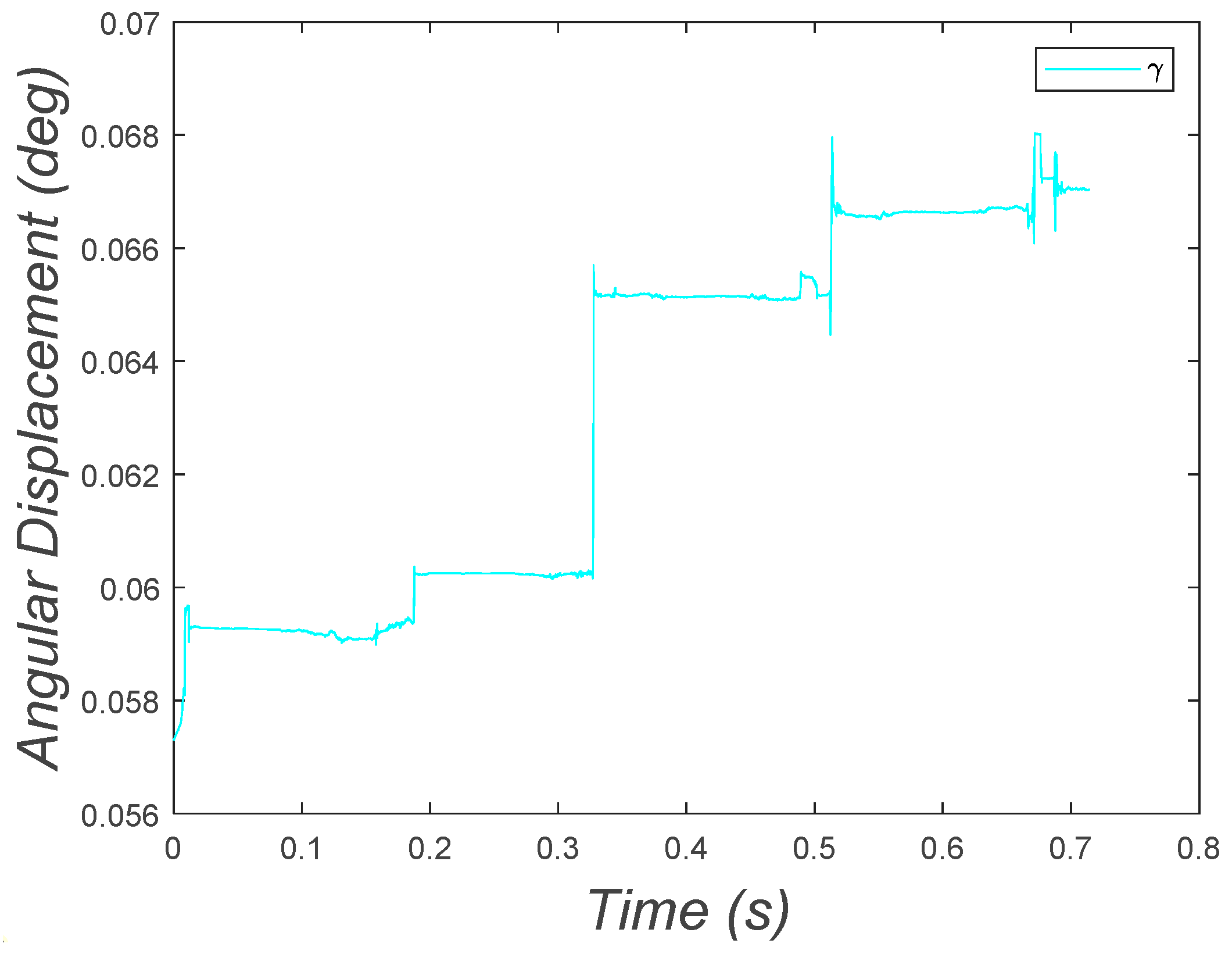
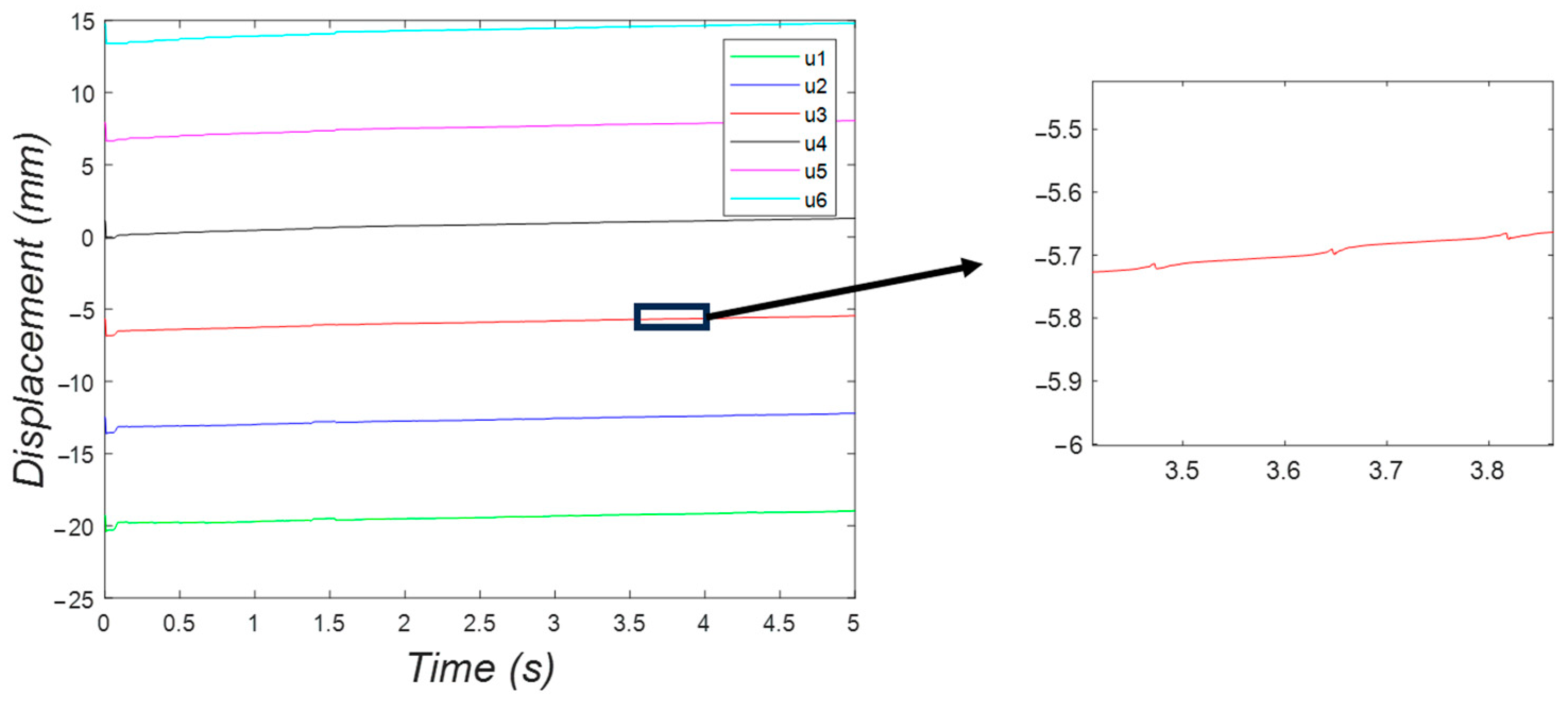
3.2.6. Simulation of Case 6
3.3. Interface Control Panel
3.3.1. PC Interface
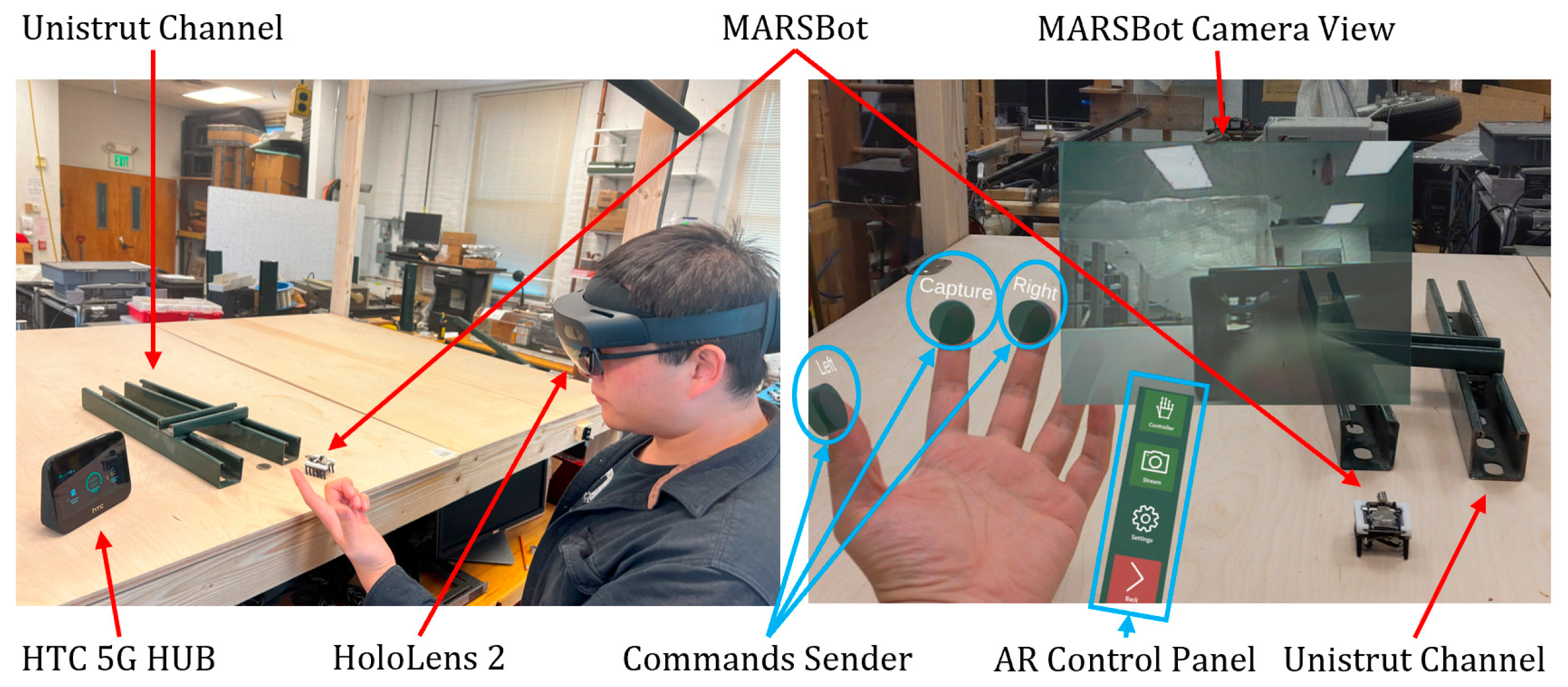
3.3.2. AR Interface
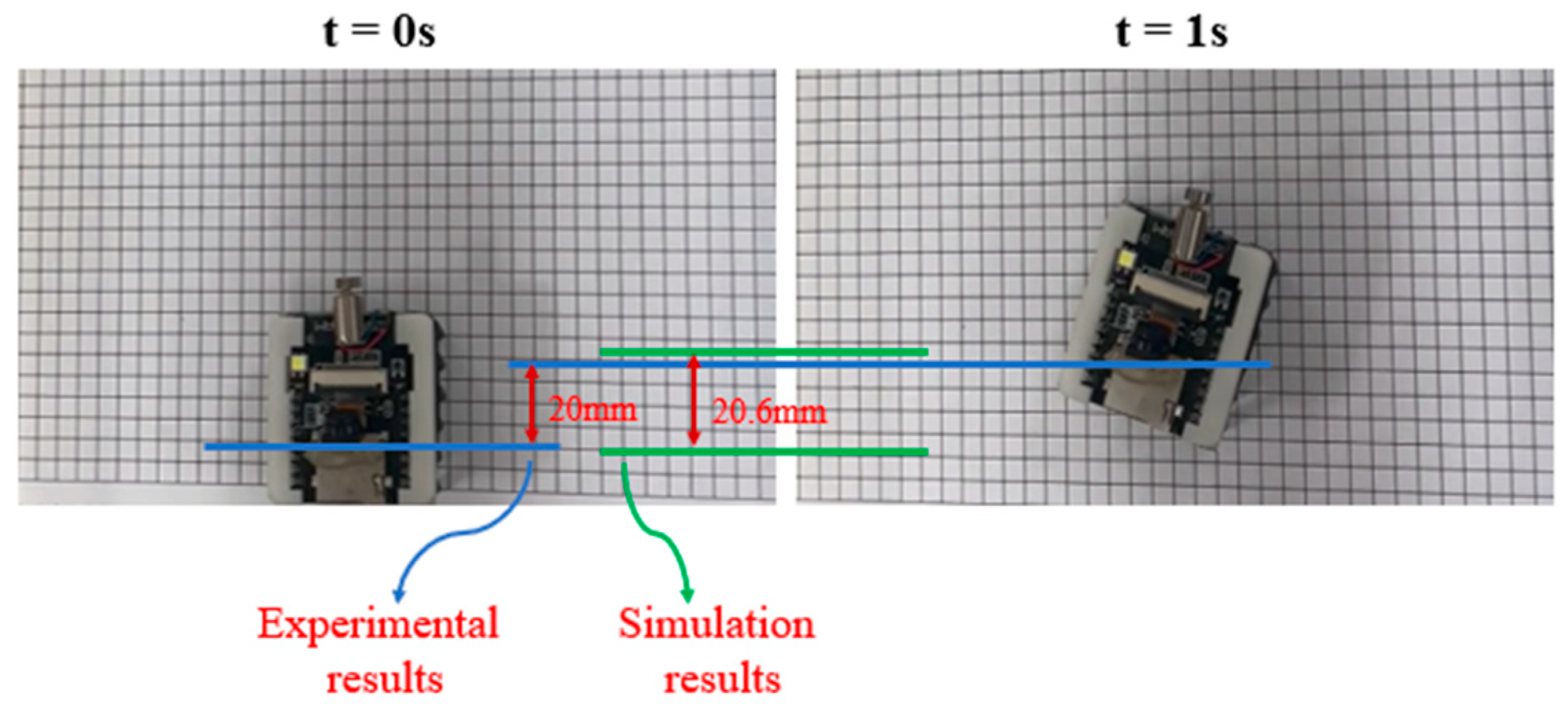
3.4. Case Studies Involving the MARSBot
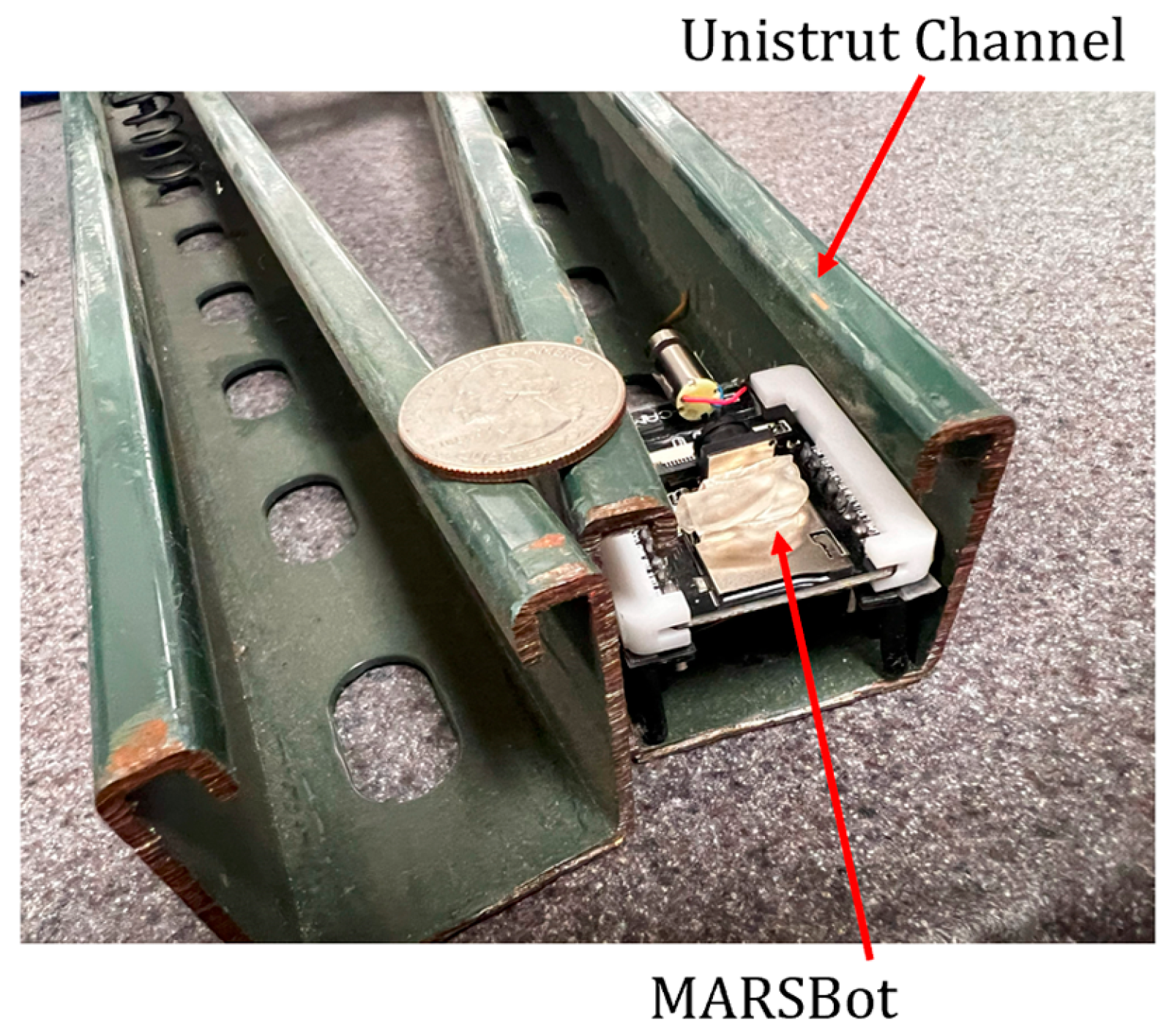
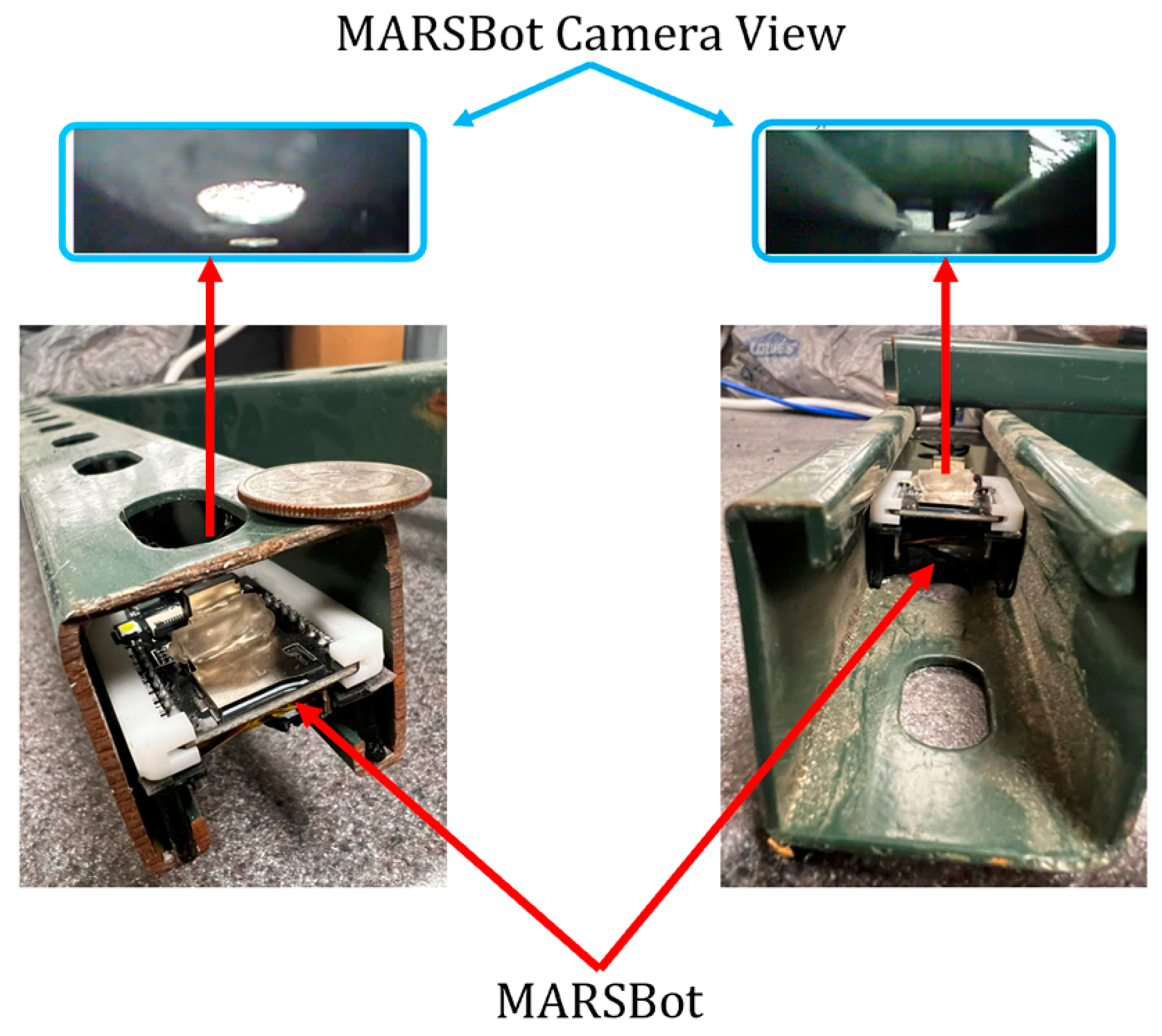
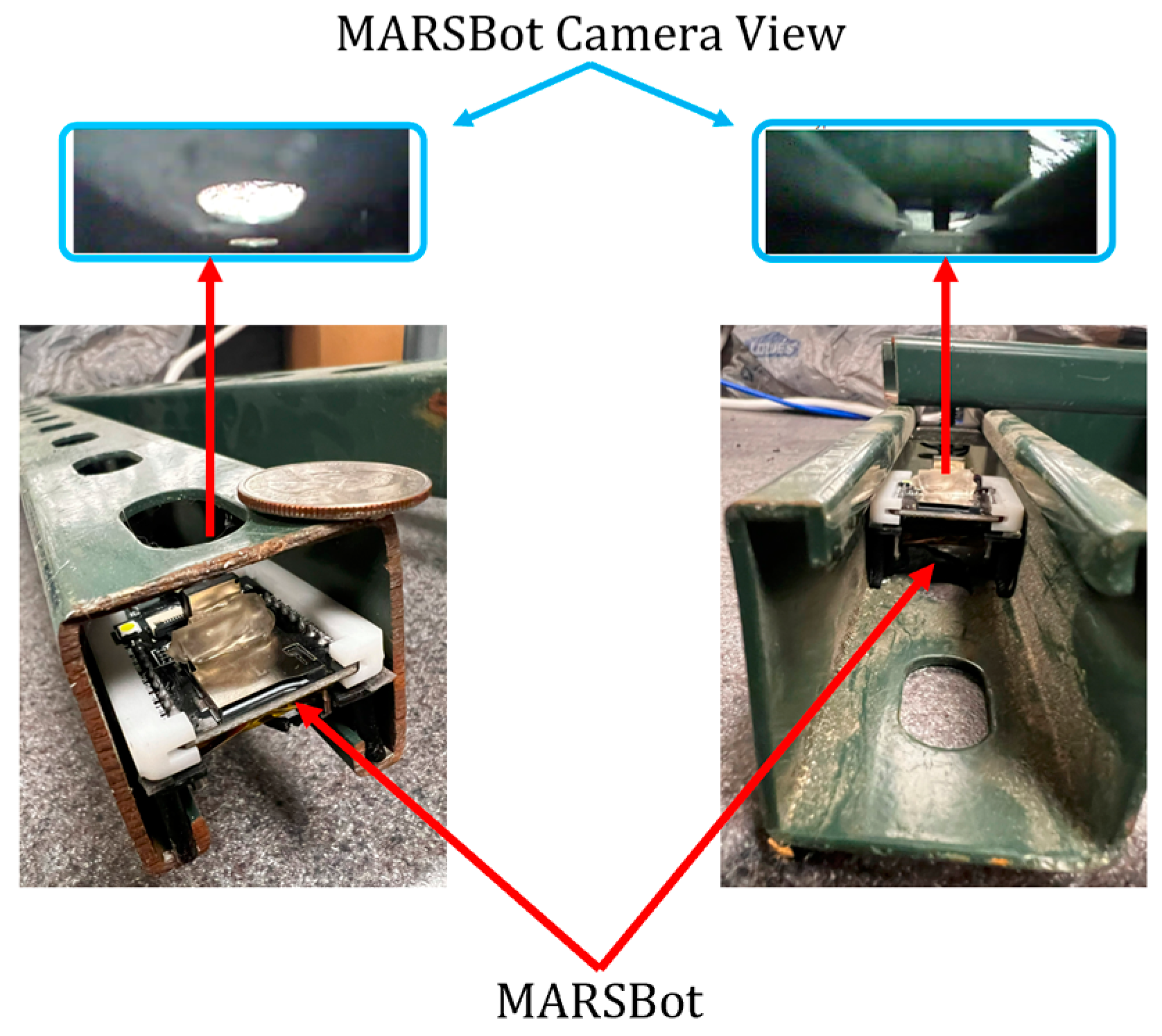
3.4.1. Slotted Strut Channel
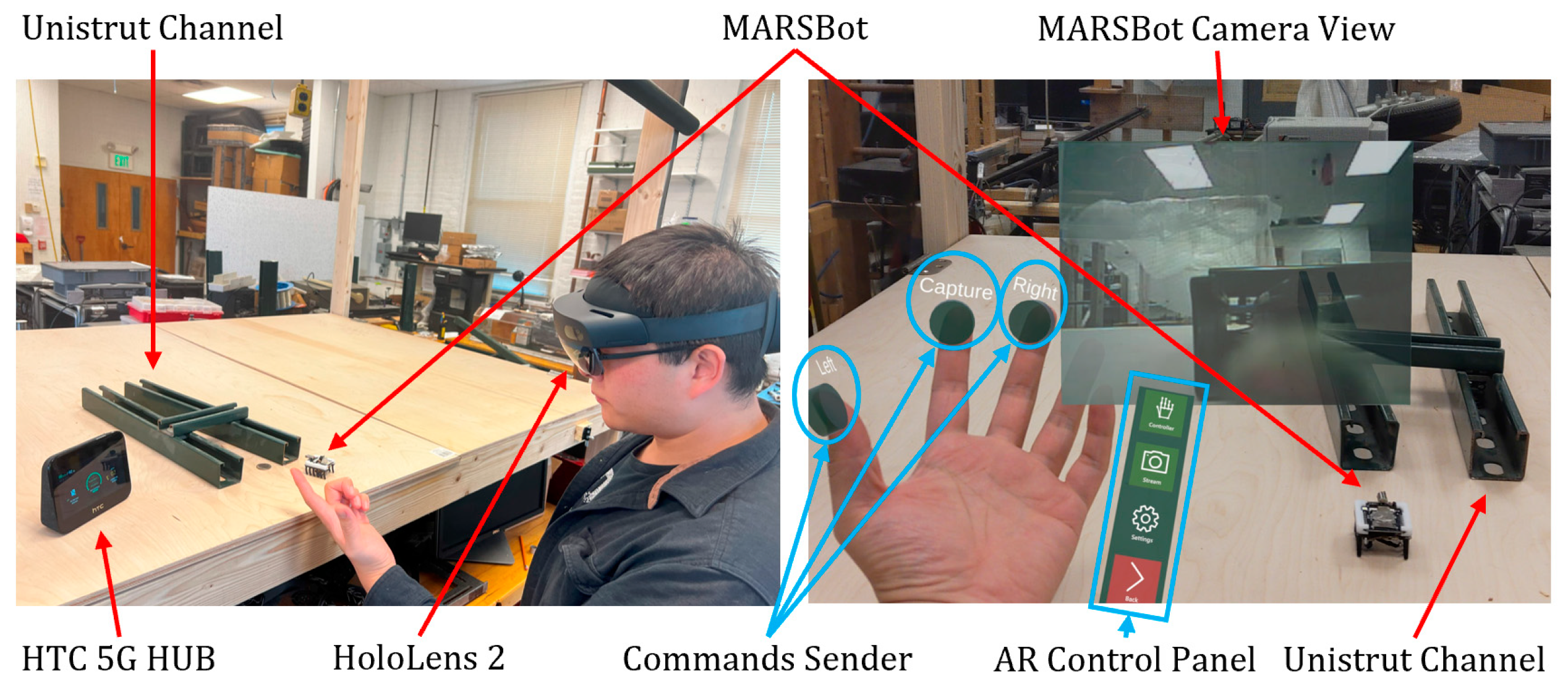
3.4.2. AR Steering
4. Discussion
4.1. Discussion of the Results
4.2. Comparative Analysis
4.3. Future Trends
- -
- Dynamic modeling of the 3D model with the comprehensive coupling effect.
- -
- Modifying the legs of the microrobot for a variety of applications.
- -
- Using different motor types and the addition of extra motors while varying the frequencies for precision control.
- -
- Enhancing the precision, tuning, and control for unbiased forward movement.
- -
- Developing advanced control strategies allowing the MARSbot to move toward the designated location determined by the AR headset user.
- -
- Incorporating artificial intelligence and machine learning algorithms in edge processors to detect objects or defects in structures and use control schemes to move the MARSBot toward them for a thorough inspection.
- -
- Tuning the stiffness and mass of the system and the rotor frequency based on the natural frequency of the system for optimal performance.
- -
- Adjusting the frequency of the eccentric mass to allow the system to move in a backward direction.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- Case 1:
- Case 3:
- Case 5:
References
- Sarmadi, H.; Entezami, A.; De Michele, C. Probabilistic data self-clustering based on semi-parametric extreme value theory for structural health monitoring. Mech. Syst. Signal Process. 2023, 187, 109976. [Google Scholar] [CrossRef]
- Giordano, P.F.; Quqa, S.; Limongelli, M.P. The value of monitoring a structural health monitoring system. Struct. Saf. 2023, 100, 102280. [Google Scholar] [CrossRef]
- Burgos, D.A.T.; Vargas, R.C.G.; Pedraza, C.; Agis, D.; Pozo, F. Damage Identification in Structural Health Monitoring: A Brief Review from its Implementation to the Use of Data-Driven Applications. Sensors 2020, 20, 733. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Chen, C.; Sagoe-Crentsil, K.; Zhang, J.; Duan, W. Intelligent robotic systems for structural health monitoring: Applications and future trends. Autom. Constr. 2022, 139, 104273. [Google Scholar] [CrossRef]
- Dryver, H.; Dylan, B.; John, G.-M.; Paul, M.; Enrique, A. Dual-durometer soft suction foot robot for concrete inspection. In Health Monitoring of Structural and Biological Systems 2014; SPIE: San Diego, CA, USA, 2014. [Google Scholar]
- Cicconofri, G.; DeSimone, A. Motility of a model bristle-bot: A theoretical analysis. Int. J. Non-Linear Mech. 2015, 76, 233–239. [Google Scholar] [CrossRef]
- Becker, F. An approach to the dynamics of a vibration-driven robot. In ROMANSY 19—Robot Design, Dynamics and Control, Proceedings of the 19th CISM-IFToMM Symposium, Paris, France, 12–15 June 2012; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Becker, F.; Börner, S.; Kästner, T.; Lysenko, V.; Zeidis, I.; Zimmermann, K. Spy bristle bot—A vibration-driven robot for the inspection of pipelines. In Proceedings of the 58th Ilmenau Scientific Colloquium, Ilmenau, Germany, 8–12 September 2014. [Google Scholar]
- Stewart, I. Dynamics and Steering of a Vibration-Driven Bristle Bot in a Pipe System. Master’s Thesis, Clemson University, Clemson, SC, USA, 2023. [Google Scholar]
- Cicconofri, G.; Becker, F.; Noselli, G.; Desimone, A.; Zimmermann, K. The inversion of motion of bristle bots: Analytical and experimental analysis. In ROMANSY 21—Robot Design, Dynamics and Control, Proceedings of the 21st CISM-IFToMM Symposium, Udine, Italy, 20–23 June 2016; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Kim, D.; Hao, Z.; Mohazab, A.; Ansari, A. On the forward and backward motion of milli-bristlebots. Int. J. Non-Linear Mech. 2020, 127, 103551. [Google Scholar] [CrossRef]
- Fath, A.; Xia, T.; Li, W. Recent Advances in the Application of Piezoelectric Materials in Microrobotic Systems. Micromachines 2022, 13, 1422. [Google Scholar] [CrossRef]
- Brunete, A.; Hernando, M.; Gambao, E. Modular multiconfigurable architecture for low diameter pipe inspection microrobots. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Brunete, A.; Hernando, M.; Torres, J.; Gambao, E. Heterogeneous multi-configurable chained microrobot for the exploration of small cavities. Autom. Constr. 2012, 21, 184–198. [Google Scholar] [CrossRef]
- Tătar, M.O.; Mândru, D.; Jisa, V.S. Development of the microrobot for indoor pipeline. Appl. Mech. Mater. 2014, 658, 724–729. [Google Scholar] [CrossRef]
- Hao, Z.; Kim, D.; Mohazab, A.R.; Ansari, A. Maneuver at micro scale: Steering by actuation frequency control in micro bristle robots. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Hao, Z.; Mayya, S.; Notomista, G.; Hutchinson, S.; Egerstedt, M.; Ansari, A. Controlling collision-induced aggregations in a swarm of micro bristle robots. IEEE Trans. Robot. 2022, 39, 590–604. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Demir, S.O.; Huang, Q.; Fukuda, T.; Sitti, M. Programmable aniso-electrodeposited modular hydrogel microrobots. Sci. Adv. 2022, 8, eade6135. [Google Scholar] [CrossRef]
- Drew, D.S.; Lambert, N.O.; Schindler, C.B.; Pister, K.S.J. Toward controlled flight of the ionocraft: A flying microrobot using electrohydrodynamic thrust with onboard sensing and no moving parts. IEEE Robot. Autom. Lett. 2018, 3, 2807–2813. [Google Scholar] [CrossRef]
- Guo, S.; Fukuda, T.; Asaka, K. A new type of fish-like underwater microrobot. IEEE/ASME Trans. Mechatron. 2003, 8, 136–141. [Google Scholar]
- Xu, T.; Huang, C.; Lai, Z.; Wu, X. Independent control strategy of multiple magnetic flexible millirobots for position control and path following. IEEE Trans. Robot. 2022, 38, 2875–2887. [Google Scholar] [CrossRef]
- Xu, T.; Hao, Z.; Huang, C.; Yu, J.; Zhang, L.; Wu, X. Multimodal locomotion control of needle-like microrobots assembled by ferromagnetic nanoparticles. IEEE/ASME Trans. Mechatron. 2022, 27, 4327–4338. [Google Scholar] [CrossRef]
- Zhong, S.; Hou, Y.; Shi, Q.; Li, Y.; Huang, H.-W.; Huang, Q.; Fukuda, T.; Wang, H. Spatial Constraint-Based Navigation and Emergency Replanning Adaptive Control for Magnetic Helical Microrobots in Dynamic Environments. IEEE Trans. Autom. Sci. Eng. 2023, 1–10. [Google Scholar] [CrossRef]
- Ristevski, S.; Cakmakci, M. Mechanical design and position control of a modular mechatronic device (MechaCell). In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Republic of Korea, 7–11 July 2015. [Google Scholar]
- Gao, J.; Rong, W.; Gao, P.; Wang, L.; Sun, L. A programmable 3D printing method for magnetically driven micro soft robots based on surface tension. J. Micromech. Microeng. 2021, 31, 085006. [Google Scholar] [CrossRef]
- Fath, A.; Liu, Y.; Tanch, S.; Hanna, N.; Xia, T.; Huston, D. Structural Health Monitoring with Robot and Augmented Reality Teams. In Structural Health Monitoring 2023; DPI Proceedings: Stanford, CA, USA, 2023. [Google Scholar]
- Fath, A.; Liu, N.H.Y.; Tanch, S.; Xia, T.; Huston, D. Monitoring Infrastructure using Augmented Reality in a Network of Microrobots with Visual Data Analysis. In Proceedings of the ASCE Engineering Mechanics Institute 2023 Conference, Atlanta, GA, USA, 6–9 June 2023; p. 495. [Google Scholar]
- Manring, L.H.; Pederson, J.; Potts, D.; Boardman, B.L.; Mascarenas, D.; Harden, T.; Cattaneo, A. Augmented reality for interactive robot control. In Special Topics in Structural Dynamics & Experimental Techniques, Proceedings of the 37th IMAC, A Conference and Exposition on Structural Dynamics 2019, Orlando, FL, USA, 28–31 January 2019; Springer: Berlin/Heidelberg, Germany, 2020; Volume 5. [Google Scholar]
- Makhataeva, Z.; Varol, H.A. Augmented Reality for Robotics: A Review. Robotics 2020, 9, 21. [Google Scholar] [CrossRef]
- Lenhardt, A.; Ritter, H. An augmented-reality based brain-computer interface for robot control. In Neural Information Processing, Proceedings of the Models and Applications: 17th International Conference, ICONIP 2010, Sydney, Australia, 21–25 November 2010; Springer: Berlin/Heidelberg, Germany, 2010; Part II 17. [Google Scholar]
- Ji, Z.; Liu, Q.; Xu, W.; Yao, B.; Liu, J.; Zhou, Z. A closed-loop brain-computer interface with augmented reality feedback for industrial human-robot collaboration. Int. J. Adv. Manuf. Technol. 2023, 124, 3083–3098. [Google Scholar] [CrossRef]
- Fath, A.; Yazdi, E.A.; Eghtesad, M. Semi-active vibration control of a semi-submersible offshore wind turbine using a tuned liquid multi-column damper. J. Ocean Eng. Mar. Energy 2020, 6, 243–262. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and comparison of dry friction force models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- MathWorks. Video Stabilization Using Point Feature Matching. Available online: https://www.mathworks.com/help/vision/ug/video-stabilization-using-point-feature-matching.html (accessed on 20 January 2024).
- Rosten, E.; Drummond, T. Fusing points and lines for high performance tracking. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005; Volume 1. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. Freak: Fast retina keypoint. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012. [Google Scholar]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Torr, P.H.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Senan, N.A.F. A Brief Introduction to Using ode45 in MATLAB; University of California at Berkeley: Berkeley, CA, USA, 2007. [Google Scholar]
- Aira, J.R.; Arriaga, F.; Íñiguez-González, G.; Crespo, J. Static and kinetic friction coefficients of Scots pine (Pinus sylvestris L.), parallel and perpendicular to grain direction. Mater. Constr. 2014, 64, e030. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microrobot | Speed (mm/s) | Dimensions (L × W × H) (mm) | Weight (g) | Durometer |
|---|---|---|---|---|
| Prototype #1 | 57.96 | 45 × 27 × 43 | 24 | 64 |
| Prototype #2 | - | 47 × 33 × 34 | 22 | 100 |
| Prototype #3 | 12.58 | 45 × 41 × 28 | 24 | 44 |
| Prototype #4 | 68.13 | 47 × 36 × 30 | 22 | 72 |
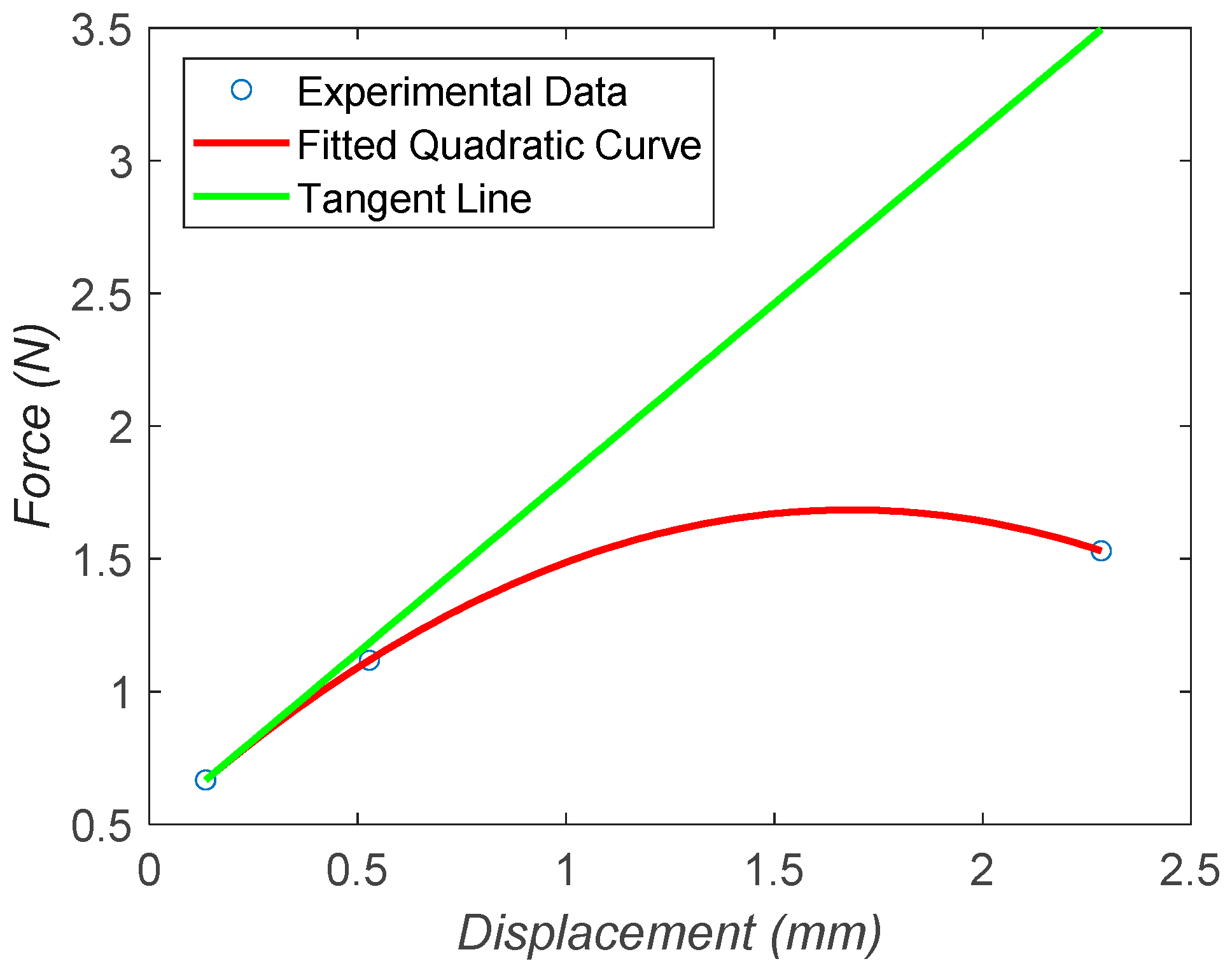
| Case | Force (N) | Displacement (m) |
|---|---|---|
| Experimental Case #1 | 0.66708 | 0.000135 |
| Experimental Case #2 | 1.11834 | 0.000528 |
| Experimental Case #3 | 1.53036 | 0.002284 |
| Case | Young’s Modulus (Pa) | Cross-Sectional Area (m2) | Length (m) | Stiffness (N/m) |
|---|---|---|---|---|
| Theoretical | 1.8 M | 7.06858 × 10−6 | 0.0145 | 1579 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fath, A.; Liu, Y.; Xia, T.; Huston, D. MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring. Micromachines 2024, 15, 202. https://doi.org/10.3390/mi15020202
Fath A, Liu Y, Xia T, Huston D. MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring. Micromachines. 2024; 15(2):202. https://doi.org/10.3390/mi15020202
Chicago/Turabian StyleFath, Alireza, Yi Liu, Tian Xia, and Dryver Huston. 2024. "MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring" Micromachines 15, no. 2: 202. https://doi.org/10.3390/mi15020202
APA StyleFath, A., Liu, Y., Xia, T., & Huston, D. (2024). MARSBot: A Bristle-Bot Microrobot with Augmented Reality Steering Control for Wireless Structural Health Monitoring. Micromachines, 15(2), 202. https://doi.org/10.3390/mi15020202