
Design and Implementation of a Flexible Electromagnetic Actuator for Tunable Terahertz Metamaterials

 , ,
, , 

Abstract
1. Introduction
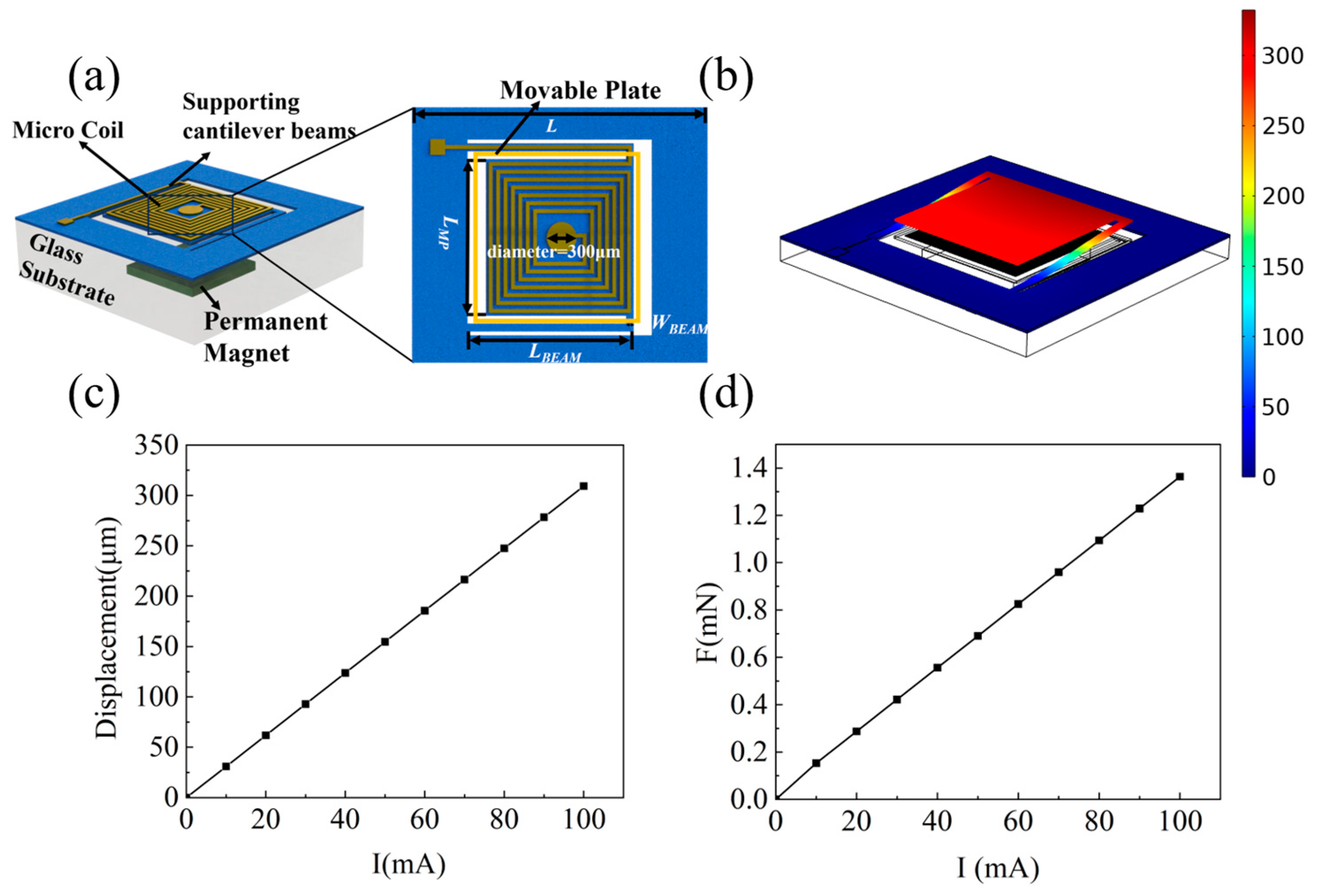
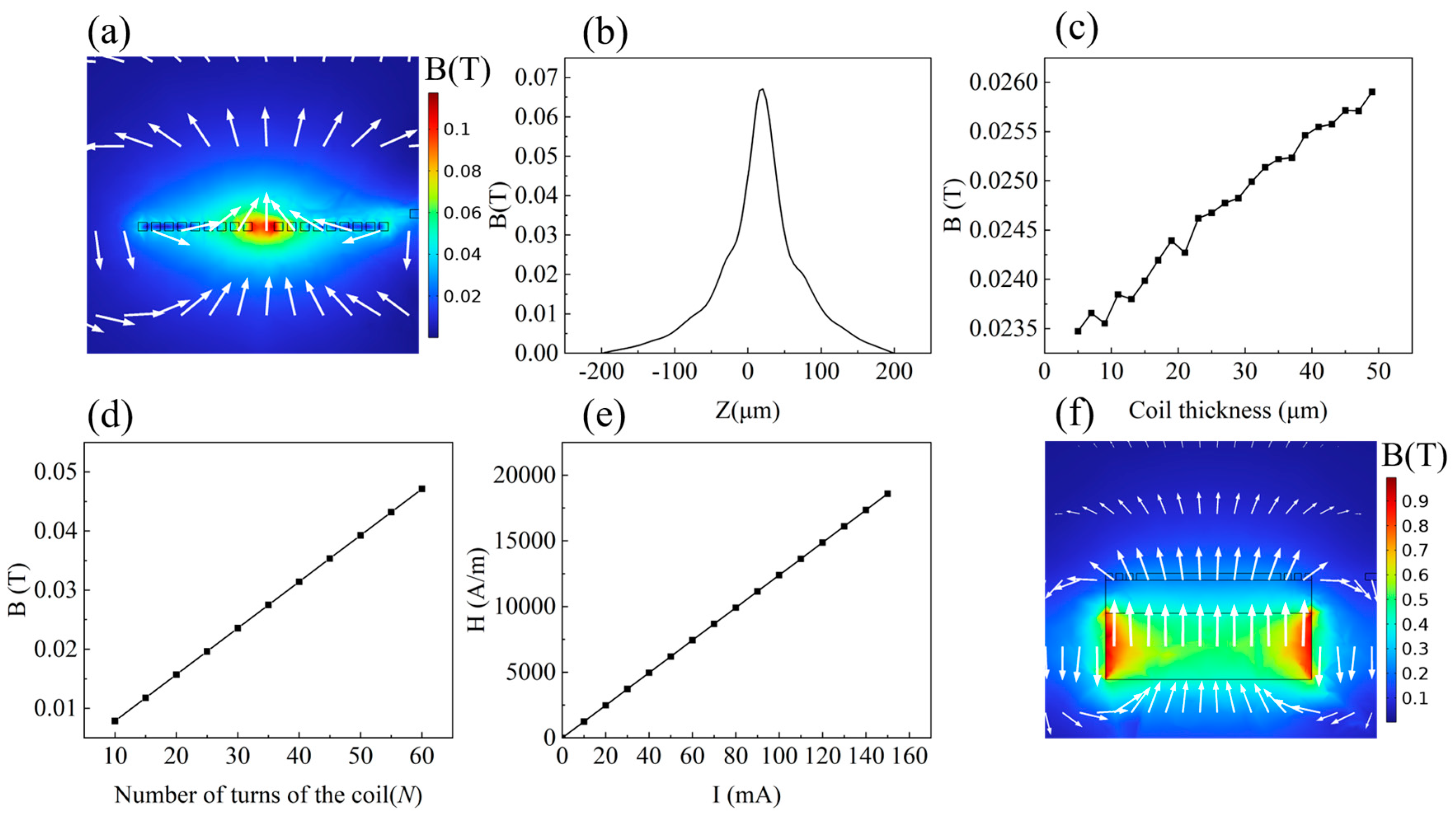
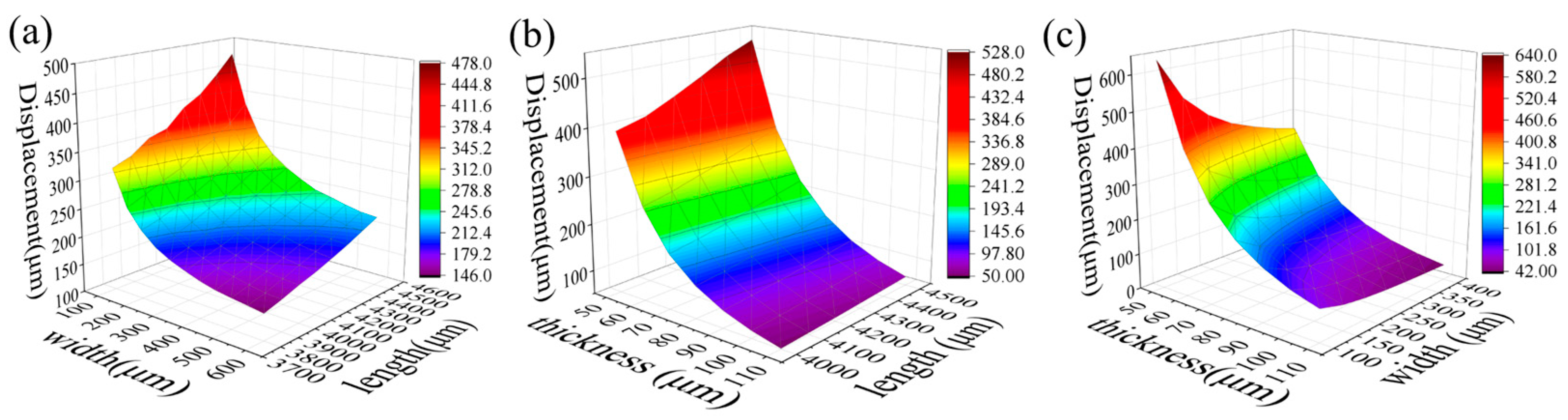
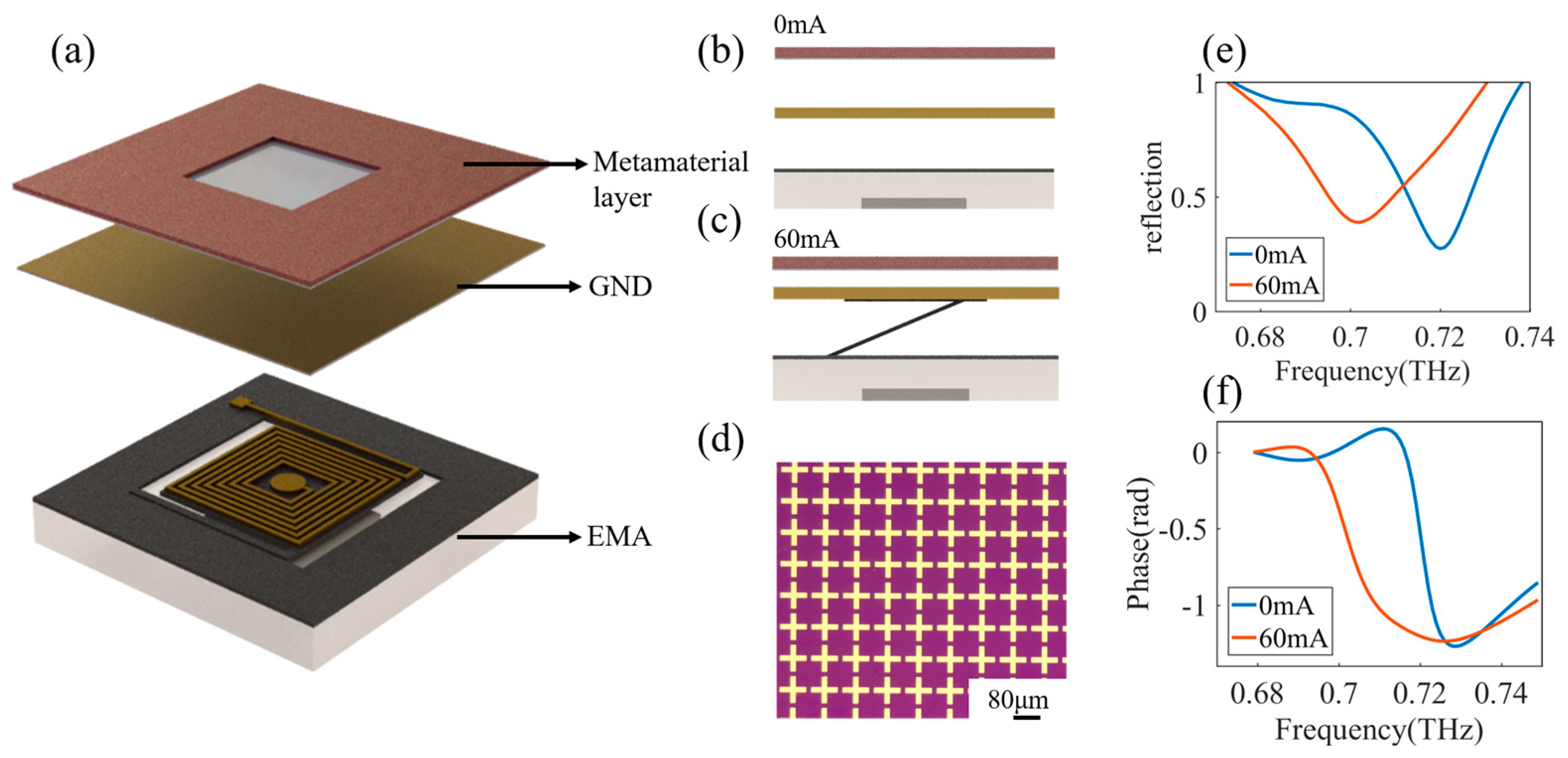
2. Theory and Design
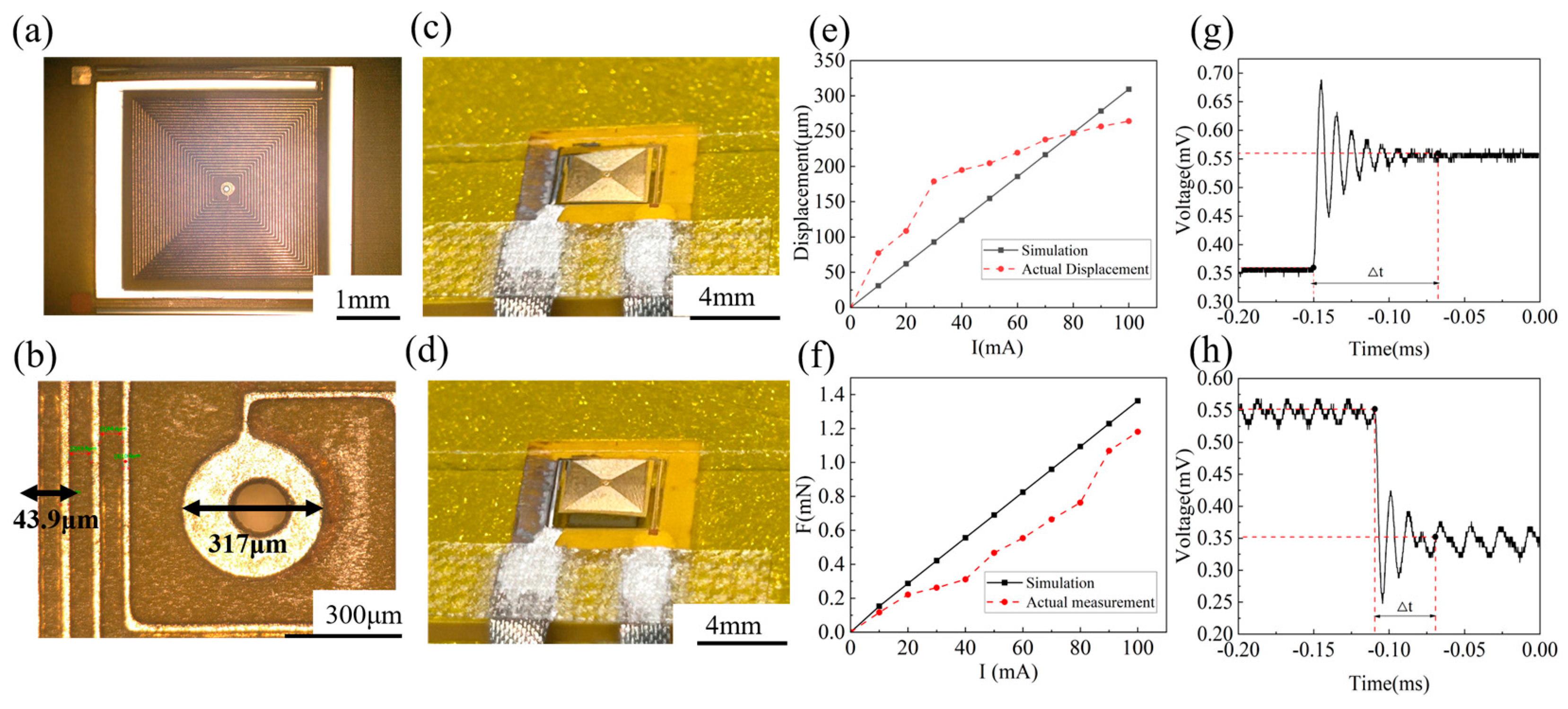
3. Fabrication
4. Results and Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Algamili, A.S.; Khir, M.H.M.; Dennis, J.O.; Ahmed, A.Y.; Alabsi, S.S.; Ba Hashwan, S.S.; Junaid, M.M. A Review of Actuation and Sensing Mechanisms in MEMS-Based Sensor Devices. Nanoscale Res. Lett. 2021, 16, 1–21. [Google Scholar] [CrossRef]
- Acome, E.; Mitchell, S.K.; Morrissey, T.G.; Emmett, M.B.; Benjamin, C.; King, M.; Radakovitz, M.; Keplinger, C. Hydraulically Amplified Self-Healing Electrostatic Actuators with Muscle-like Performance. Science 2018, 359, 61–65. [Google Scholar] [CrossRef]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent Trends in Piezoelectric Actuators for Precision Motion and Their Applications: A Review. Smart Mater. Struct. 2021, 30, abc6b9. [Google Scholar] [CrossRef]
- Guo, Y.; Qiu, H.; Ruan, K.; Zhang, Y.; Gu, J. Hierarchically Multifunctional Polyimide Composite Films with Strongly Enhanced Thermal Conductivity. Nano-Micro Lett. 2022, 14, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Doerger, S.R.; Harnett, C.K. Force-Amplified Soft Electromagnetic Actuators. Actuators 2018, 7, 76. [Google Scholar] [CrossRef]
- Younis, M.I. Sensing and ActuationActuationin MEMS. In MEMS Linear and Nonlinear Statics and Dynamics; Younis, M.I., Ed.; Springer: Boston, MA, USA, 2011; pp. 57–96. ISBN 978-1-4419-6020-7. [Google Scholar]
- Zhang, W.-M.; Yan, H.; Peng, Z.-K.; Meng, G. Electrostatic Pull-in Instability in MEMS/NEMS: A Review. Sens. Actuators A-Phys. 2014, 214, 187–218. [Google Scholar] [CrossRef]
- Sun, Y.-C.; Leaker, B.; Naguib, H.E. Development of Electrothermal Actuator (ETA) with Low Activation Voltage. In Behavior and Mechanics of Multifunctional Materials and Composites 2017; Goulbourne, N., Ed.; SPIE: Bellingham, WA, USA, 2017; Volume 10165. [Google Scholar]
- Van, L.L.; Bui, T.T.; Nhu, C.N.; Ngoc, A.N.; Dinh, T.X.; Dang, L.B.; Tran, C.-D.; Duc, T.C.; Dau, V.T. Simulation and Experimental Study of a Synthetic Jet Valveless Pump. IEEE-ASME Trans. Mechatron. 2020, 25, 1162–1170. [Google Scholar] [CrossRef]
- Gao, X.; Yang, J.; Wu, J.; Xin, X.; Li, Z.; Yuan, X.; Shen, X.; Dong, S. Piezoelectric Actuators and Motors: Materials, Designs, and Applications. Adv. Mater. Technol. 2020, 5, 1900716. [Google Scholar] [CrossRef]
- Sabarianand, D.V.; Karthikeyan, P.; Muthuramalingam, T. A Review on Control Strategies for Compensation of Hysteresis and Creep on Piezoelectric Actuators Based Micro Systems. Mech. Syst. Signal Process. 2020, 140, 106634. [Google Scholar] [CrossRef]
- Hofmann, U.; Oldsen, M.; Quenzer, H.-J.; Janes, J.; Heller, M.; Weiss, M.; Fakas, G.; Ratzmann, L.; Marchetti, E.; D’Ascoli, F.; et al. Wafer-Level Vacuum Packaged Micro-Scanning Mirrors for Compact Laser Projection Displays. In Moems And Miniaturized Systems VII; Dickensheets, D., Schenk, H., Eds.; SPIE: Bellingham, WA, USA, 2008; Volume 6887. [Google Scholar]
- Wagner, B.; Benecke, W. Magnetically Driven Microactuator: Design Considerations. In Micro System Technologies 90; Reichl, H., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; pp. 838–843. ISBN 978-3-642-45678-7. [Google Scholar]
- Hansen, R.d.O.; Matefi-Tempfli, M.; Safonovs, R.; Adam, J.; Chemnitz, S.; Reimer, T.; Wagner, B.; Benecke, W.; Matefi-Tempfli, S. Magnetic Films for Electromagnetic Actuation in MEMS Switches. Microsyst. Technol.-Micro-Nanosyst.-Inf. Storage Process. Syst. 2018, 24, 1987–1994. [Google Scholar] [CrossRef]
- Sun, J.; Tao, Z.; Li, H.; Zhu, K.; Wang, D.; Wu, H.; Xu, T. A MEMS Voice Coil Motor with a 3D Solenoid Coil. In Proceedings of the 2021 IEEE 16th International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Xiamen, China, 25–29 April 2021; pp. 1745–1748. [Google Scholar]
- Jiang, B.; Peng, M.; Liu, Y.; Zhou, T.; Su, Y. The Fabrication of 2D Micromirror with Large Electromagnetic Driving Forces. Sens. Actuators A-Phys. 2019, 286, 163–168. [Google Scholar] [CrossRef]
- Mao, G.; Drack, M.; Karami-Mosammam, M.; Wirthl, D.; Stockinger, T.; Schwoediauer, R.; Kaltenbrunner, M. Soft Electromagnetic Actuators. Sci. Adv. 2020, 6, abc0251. [Google Scholar] [CrossRef]
- Liu, X.-J.; Zheng, M.-S.; Chen, G.; Dang, Z.-M.; Zha, J.-W. High-Temperature Polyimide Dielectric Materials for Energy Storage: Theory, Design, Preparation and Properties. Energy Environ. Sci. 2022, 15, 56–81. [Google Scholar] [CrossRef]
- Yi, C.; Li, W.; Shi, S.; He, K.; Ma, P.; Chen, M.; Yang, C. High-Temperature-Resistant and Colorless Polyimide: Preparations, Properties, and Applications. Sol. Energy 2020, 195, 340–354. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Chen, Z.-H.; Chang, H.-T.; Wen, C.-Y.; Cheng, C.-H. Design and Fabrication of Novel Micro Electromagnetic Actuator. Microsyst. Technol. 2009, 15, 1171–1177. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Zhu, B.; Chen, Q.; Zhang, Y.; Xu, Z.; Sun, D.; Lin, L.; Wu, D. Self-Patterning of Highly Stretchable and Electrically Conductive Liquid Metal Conductors by Direct-Write Super-Hydrophilic Laser- Induced Graphene and Electroless Copper Plating. ACS Appl. Mater. Interfaces 2023, 15, 4713–4723. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Liang, C.; Chen, C.; Wang, X.; Zhou, E.; Bian, X.; Yang, Y.; You, R.; Zhao, X.; Zhao, J.; et al. High-Efficiency Dynamic Terahertz Deflector Utilizing a Mechanically Tunable Metasurface. Research 2023, 6, 274. [Google Scholar] [CrossRef]
- Xiong, X.; Xie, H. MEMS dual-mode electrostatically actuated micromirror. In Proceedings of the 2014 Zone 1 Conference of the American Society for Engineering Education, Bridgeport, CT, USA, 3–5 April 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Liu, M.; Susli, M.; Silva, D.; Putrino, G.; Kala, H.; Fan, S.; Cole, M.; Faraone, L.; Wallace, V.P.; Padilla, W.J.; et al. Ultrathin Tunable Terahertz Absorber Based on MEMS-Driven Metamaterial. Microsyst. Nanoeng. 2017, 3, 1–6. [Google Scholar] [CrossRef]
- Xiao, S.; Wang, T.; Liu, T.; Zhou, C.; Jiang, X.; Zhang, J. Active Metamaterials and Metadevices: A Review. J. Phys. D-Appl. Phys. 2020, 53, 503002. [Google Scholar] [CrossRef]
- Xing, Z.; Ji, Y.; McCoul, D.; Jin, T.; Zhao, J. Electromagnetic Force Distribution of Planar Coils: Analytical Model and Optimization. Electr. Power Compon. Syst. 2022, 49, 967–977. [Google Scholar] [CrossRef]
- Shi, X.; Ren, C.; Li, Y.; Ding, G. Design, Modeling, and Optimization of a Bistable Electromagnetic Actuator With Large Deflection. IEEE Magn. Lett. 2021, 12, 3099373. [Google Scholar] [CrossRef]
- Zhang, Y.-F.; Li, D.-S. Fabrication and Simulation of an Electromagnetic Microrelay. J. Semicond. 2002, 23, 1298–1302. [Google Scholar] [CrossRef]
- Liu, X.; Whalen, A.J.; Kim, K.; Cai, C.; Lauritzen, M.; Bertram, N.; Chang, B.; Yu, T.; Han, A.; Woo, S.; et al. MEMS Micro-Coils for Magnetic Neurostimulation. Biosens. Bioelectron. 2023, 227, 115143. [Google Scholar] [CrossRef]
- Wang, G.; Valla, M.; Solsona, J. Position Sensorless Permanent Magnet Synchronous Machine Drives—A Review. IEEE Trans. Ind. Electron. 2020, 67, 5830–5842. [Google Scholar] [CrossRef]
- Cui, T.J.; Li, L.; Liu, S.; Ma, Q.; Zhang, L.; Wan, X.; Jiang, W.X.; Cheng, Q. Information Metamaterial Systems. iScience 2020, 23, 101403. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Can, S.; Schalch, J.; Zhao, X.; Duan, G.; Averitt, R.D.; Zhang, X. Ultrathin Terahertz Triple-Band Metamaterial Absorbers: Consideration of Interlayer Coupling. Phys. Rev. Appl. 2020, 14, 054021. [Google Scholar] [CrossRef]
- Carrara, M.; Cacan, M.R.; Toussaint, J.; Leamy, M.J.; Ruzzene, M.; Erturk, A. Metamaterial-Inspired Structures and Concepts for Elastoacoustic Wave Energy Harvesting. Smart Mater. Struct. 2013, 22, 065004. [Google Scholar] [CrossRef]
- Vasilantonakis, N.; Wurtz, G.A.; Podolskiy, V.A.; Zayats, A.V. Refractive Index Sensing with Hyperbolic Metamaterials: Strategies for Biosensing and Nonlinearity Enhancement. Opt Express 2015, 23, 14329. [Google Scholar] [CrossRef]
- Watts, C.M.; Shrekenhamer, D.; Montoya, J.; Lipworth, G.; Hunt, J.; Sleasman, T.; Krishna, S.; Smith, D.R.; Padilla, W.J. Terahertz Compressive Imaging with Metamaterial Spatial Light Modulators. Nat. Photonics 2014, 8, 605–609. [Google Scholar] [CrossRef]
- Lv, X.; Wei, W.; Mao, X.; Chen, Y.; Yang, J.; Yang, F. A Novel MEMS Electromagnetic Actuator with Large Displacement. Sens. Actuators A-Phys. 2015, 221, 22–28. [Google Scholar] [CrossRef]
- Miao, X.; Dai, X.; Huang, Y.; Ding, G.; Zhao, X. Large Out-of-Plane Displacement Bistable Electromagnetic Microswitch on a Single Wafer. Sensers 2016, 16, 634. [Google Scholar] [CrossRef] [PubMed]
- Dehghan, M.; Tahmasebipour, M.; Ebrahimi, S.S.S. Design, Fabrication, and Characterization of an SLA 3D Printed Nanocomposite Electromagnetic Microactuator. Microelectron. Eng. 2021, 254, 111695. [Google Scholar] [CrossRef]
- Lee, S.W.; Lee, S.S. Focal Tunable Liquid Lens Integrated with an Electromagnetic Actuator. Appl. Phys. Lett. 2007, 90, 121129. [Google Scholar] [CrossRef]
- Song, K.; Kim, S.; Cha, Y. Soft Electromagnetic Actuator for Assembly Robots. Smart Mater. Struct. 2020, 29, 067001. [Google Scholar] [CrossRef]
- Liu, B.; Li, D.; Yang, X.; Li, X. Design and Fabrication of a Micro Electromagnetic Actuator. In Proceedings of the 2006 1st IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Zhuhai, China, 18–21 January 2006; pp. 353–356. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Length of the side of the glass substrate (L) | 8 mm |
| Thickness of glass substrate (H) | 2 mm |
| Length of the side of the permanent magnet (l) | 3 mm |
| Thickness of permanent magnet (h) | 300 μm |
| Length of supporting cantilever beam (LBEAM) | 4300 μm |
| Width of the supporting cantilever beam (WBEAM) | 200 μm |
| Thickness of the supporting cantilever beam (P) | 60 μm |
| Length of the side of the movable plate (LMP) | 4 mm |
| Coil width (Wwire) | 10 μm |
| Coil thickness (twire) | 30 μm |
| Number of turns of the coil (N) | 26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, S.; Liang, C.; Mei, Z.; Xie, R.; Sun, Z.; Li, J.; Zhang, W.; Ruan, Y.; Zhao, X. Design and Implementation of a Flexible Electromagnetic Actuator for Tunable Terahertz Metamaterials. Micromachines 2024, 15, 219. https://doi.org/10.3390/mi15020219
Zhou S, Liang C, Mei Z, Xie R, Sun Z, Li J, Zhang W, Ruan Y, Zhao X. Design and Implementation of a Flexible Electromagnetic Actuator for Tunable Terahertz Metamaterials. Micromachines. 2024; 15(2):219. https://doi.org/10.3390/mi15020219
Chicago/Turabian StyleZhou, Shengru, Chao Liang, Ziqi Mei, Rongbo Xie, Zhenci Sun, Ji Li, Wenqiang Zhang, Yong Ruan, and Xiaoguang Zhao. 2024. "Design and Implementation of a Flexible Electromagnetic Actuator for Tunable Terahertz Metamaterials" Micromachines 15, no. 2: 219. https://doi.org/10.3390/mi15020219
APA StyleZhou, S., Liang, C., Mei, Z., Xie, R., Sun, Z., Li, J., Zhang, W., Ruan, Y., & Zhao, X. (2024). Design and Implementation of a Flexible Electromagnetic Actuator for Tunable Terahertz Metamaterials. Micromachines, 15(2), 219. https://doi.org/10.3390/mi15020219