
Water-Immersible MEMS Mirror with a Large Optical Aperture

 , ,
, ,
Abstract
:1. Introduction
2. Design and Fabrication
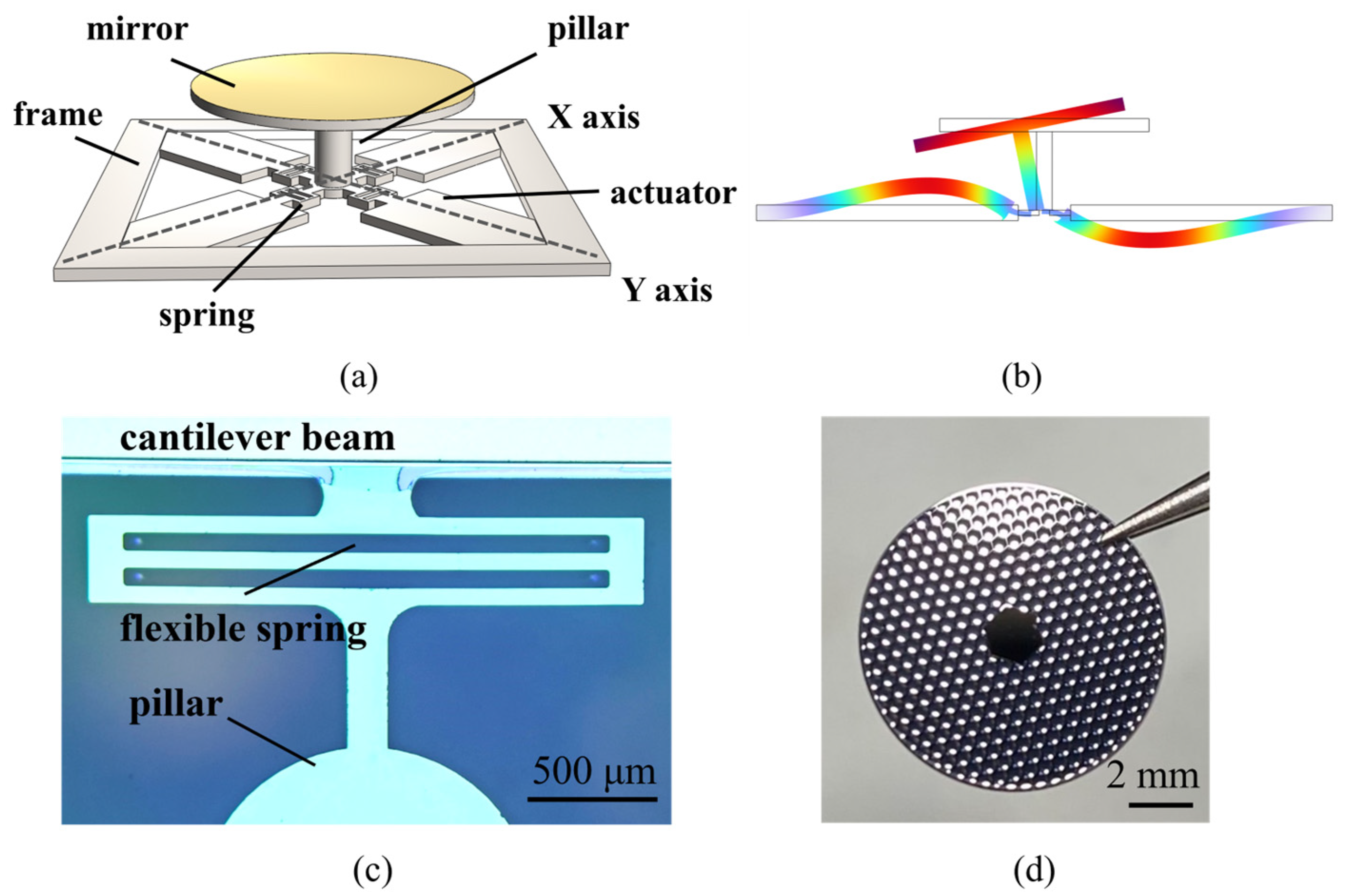
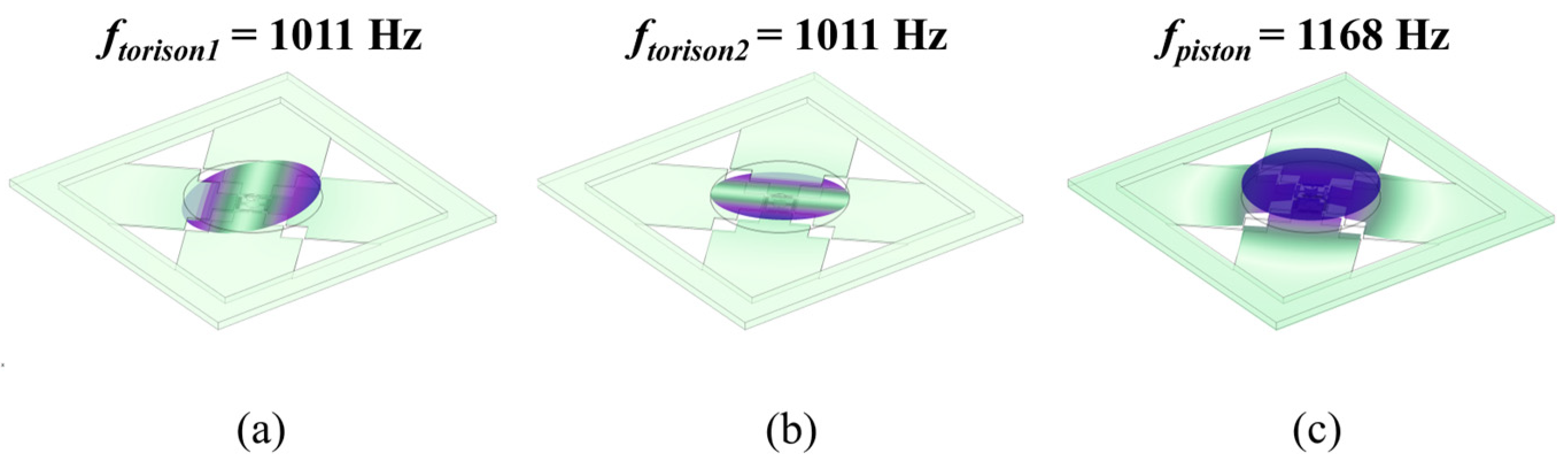
2.1. Mirror Design
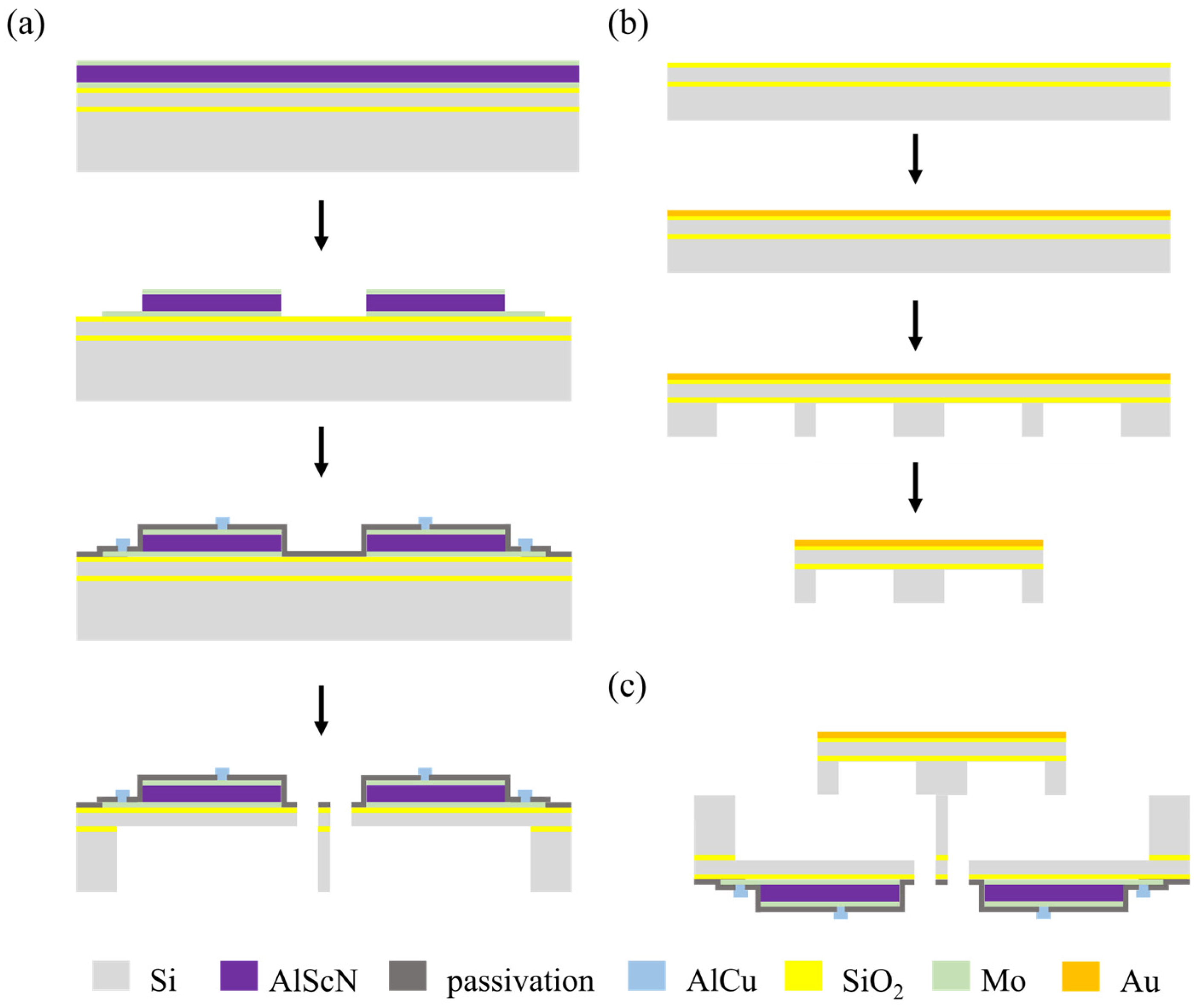
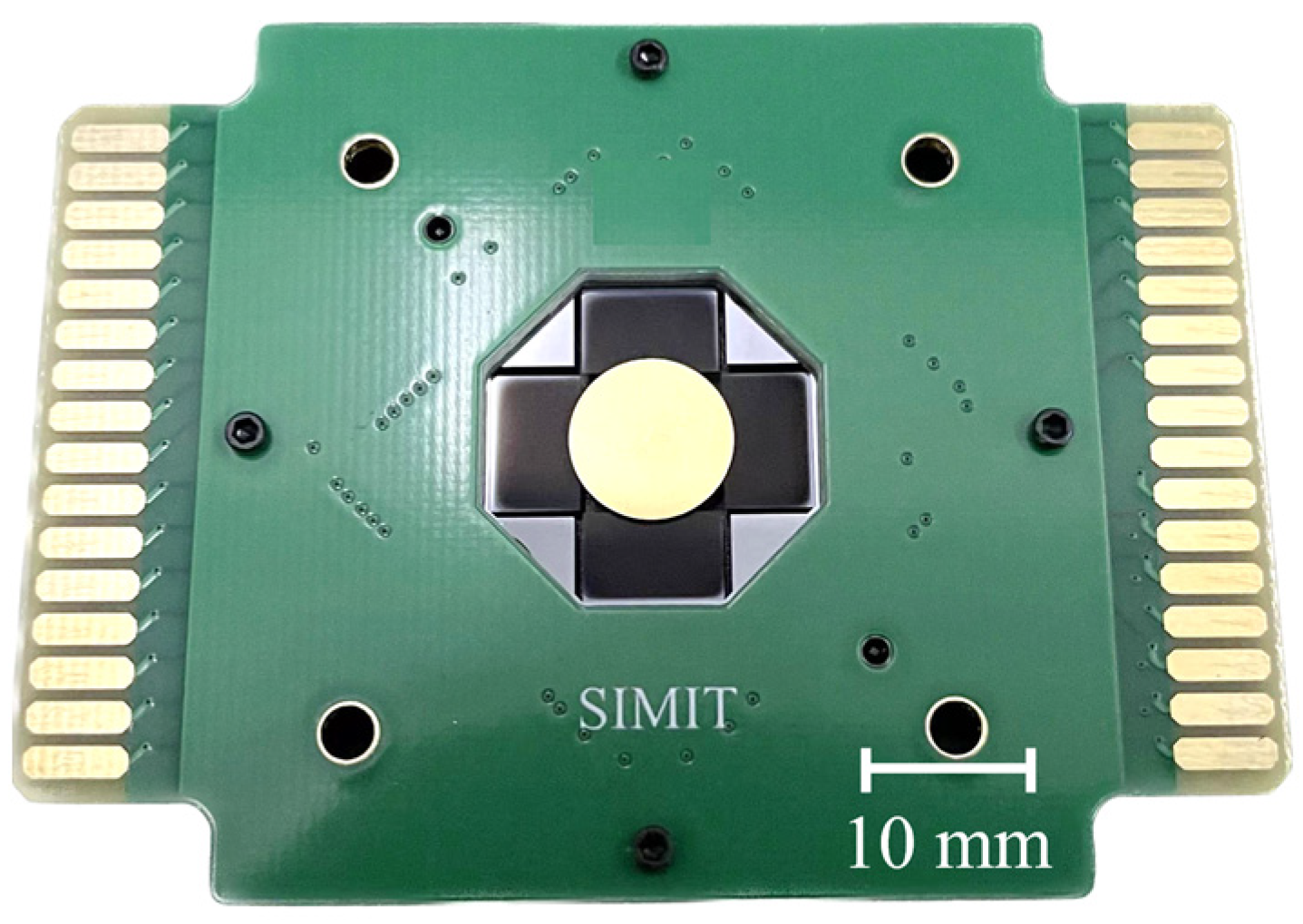
2.2. Fabrication and Assembly
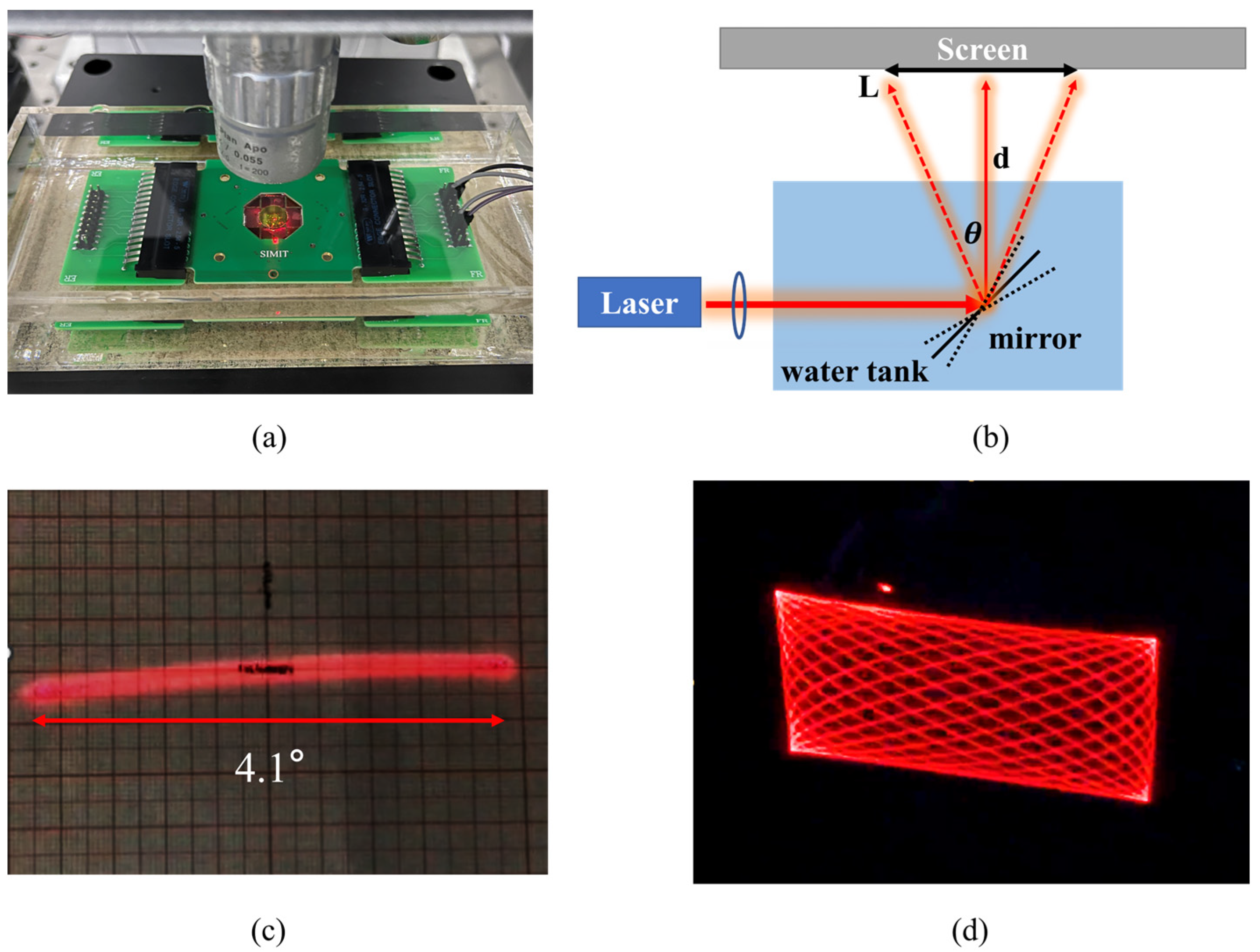
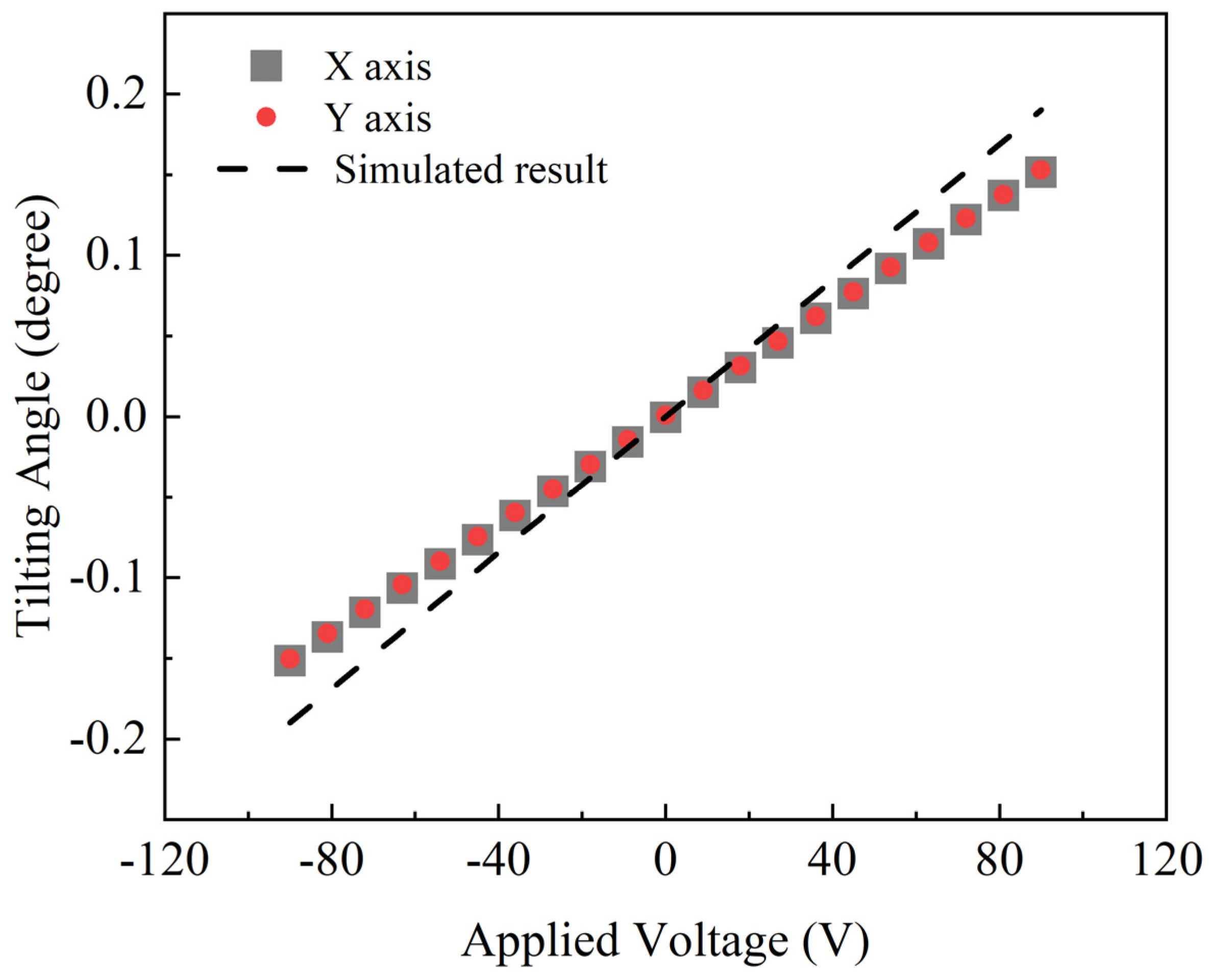
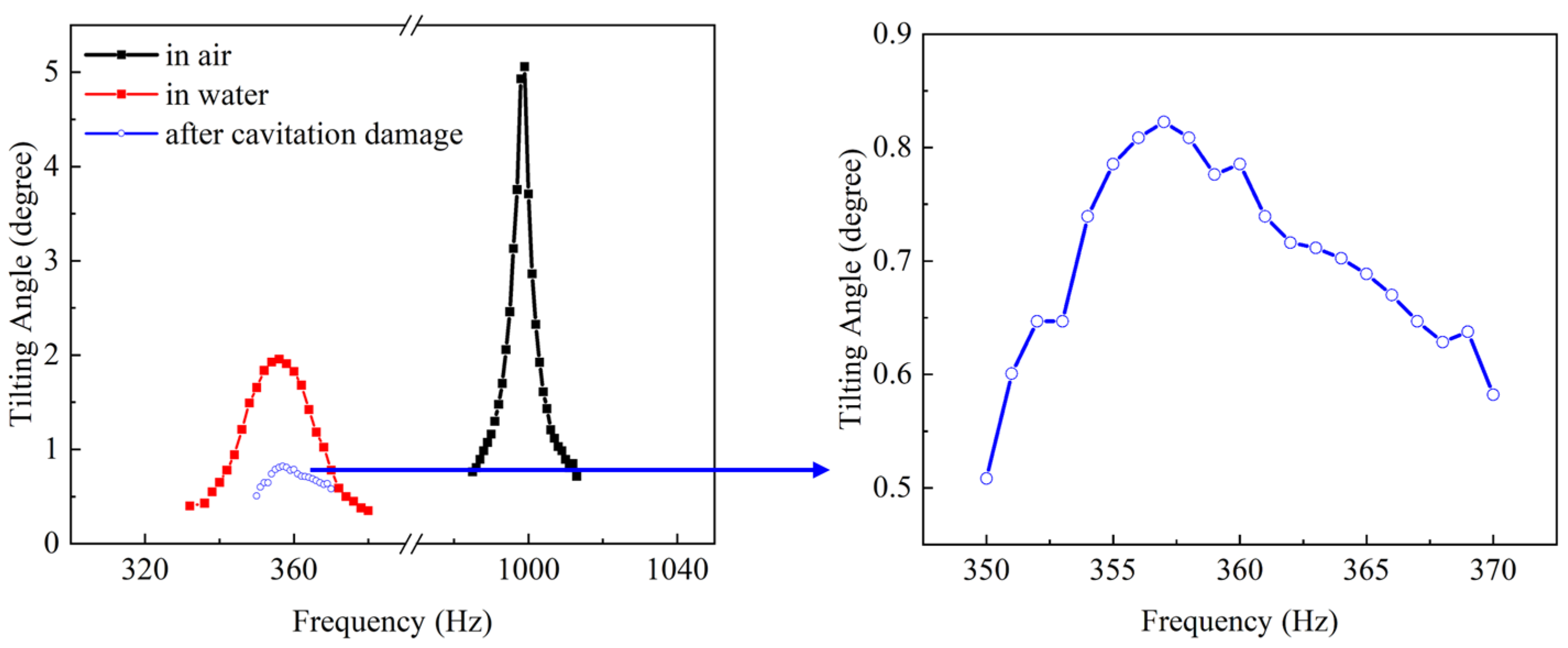
3. Characterization
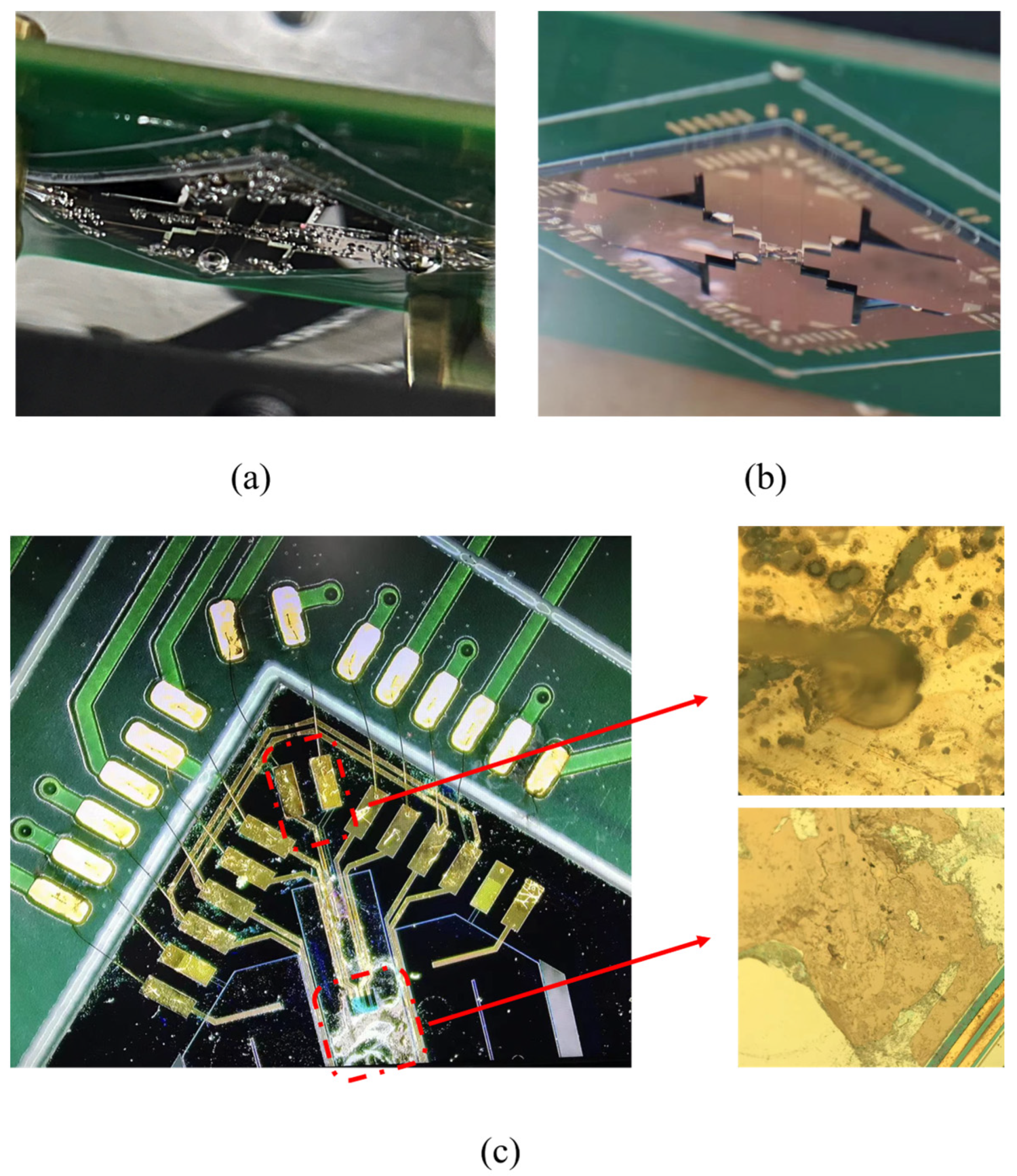
4. Cavitation Damage
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, J.; Guo, S.; Wu, L.; Liu, L.; Choe, S.-W.; Sorg, B.S.; Xie, H. 3D In Vivo optical coherence tomography based on a low-voltage, large-scan-range 2D MEMS mirror. Opt. Express 2010, 18, 12065–12075. [Google Scholar] [CrossRef] [PubMed]
- Gu-Stoppel, S.; Lisec, T.; Fichtner, S.; Funck, N.; Claus, M.; Wagner, B.; Lofink, F. AlScN based MEMS quasi-static mirror matrix with large tilting angle and high linearity. Sens. Actuators A Phys. 2020, 312, 112107. [Google Scholar] [CrossRef]
- Hofmann, U.; Senger, F.; Soerensen, F.; Stenchly, V.; Janes, J. Biaxial resonant 7mm-MEMS mirror for automotive LIDAR application. In Proceedings of the International Conference on Optical Mems & Nanophotonics, Banff, AB, Canada, 6–9 August 2012. [Google Scholar]
- Wang, D.; Watkins, C.; Xie, H. MEMS Mirrors for LiDAR: A Review. Micromachines 2020, 11, 456. [Google Scholar] [CrossRef]
- Tauscher, J.; Davis, W.O.; Brown, D.; Ellis, M.; Ma, Y.; Sherwood, M.E.; Bowman, D.; Helsel, M.P.; Coy, J.W. Evolution of MEMS scanning mirrors for laser projection in compact consumer electronics. In Proceedings of the SPIE Conference on MOEMS and Miniaturized Systems, San Francisco, CA, USA, 23–28 January 2010. [Google Scholar]
- Liu, Y.; Wang, L.; Su, Y.; Zhang, Y.; Wang, Y.; Wu, Z. AlScN Piezoelectric MEMS Mirrors with Large Field of View for LiDAR Application. Micromachines 2022, 13, 1550. [Google Scholar] [CrossRef]
- Wu, M.C.; Solgaard, O.; Ford, J.E. Optical MEMS for Lightwave Communication. J. Light. Technol. 2006, 24, 4433–4454. [Google Scholar] [CrossRef]
- Dobbelaere, P.D.; Falta, K.; Gloeckner, S.; Patra, S. Digital MEMS for optical switching. IEEE Commun. Mag. 2002, 40, 88–95. [Google Scholar] [CrossRef]
- Lee, C.; Kim, J.Y.; Kim, C. Recent Progress on Photoacoustic Imaging Enhanced with Microelectromechanical Systems (MEMS) Technologies. Micromachines 2018, 9, 584. [Google Scholar] [CrossRef]
- Milanovic, V.; Kasturi, A. Novel fluidic packaging of gimbal-less MEMS mirrors for increased optical resolution and overall performance. In Proceedings of the Micro- and Nanotechnology Sensors, Systems, and Applications VIII, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Duan, X.; Li, S.; Medellin, A.; Ma, C.; Zou, J. A two-axis water-immersible micro scanning mirror using hybrid polymer and elastomer hinges. Sens. Actuators A Phys. 2020, 312, 112108. [Google Scholar] [CrossRef]
- Kim, J.; Lee, C.; Park, K.; Lim, G.; Kim, C. A PDMS-Based 2-Axis Waterproof Scanner for Photoacoustic Microscopy. Sensors 2015, 15, 9815–9826. [Google Scholar] [CrossRef]
- Xi, L.; Sun, J.; Zhu, Y.; Wu, L.; Xie, H.; Jiang, H. Photoacoustic imaging based on MEMS mirror scanning. Biomed. Opt. Express 2010, 1, 1278–1283. [Google Scholar] [CrossRef]
- Xu, S.; Li, S.; Zou, J. A micromachined water-immersible scanning mirror using BoPET hinges. Sens. Actuators A Phys. 2019, 298, 111564. [Google Scholar] [CrossRef]
- Xu, S.; Zou, J. Two-axis water-immersible microscanning mirror for scanning optics and acoustic microscopy. J. Micro/Nanolithography MEMS MOEMS 2016, 15, 045005. [Google Scholar] [CrossRef]
- Huang, C.H.; Yao, J.; Wang, L.V.; Zou, J. A water-immersible 2-axis scanning mirror microsystem for ultrasound andha photoacoustic microscopic imaging applications. Microsyst. Technol. 2013, 19, 577–582. [Google Scholar] [CrossRef] [PubMed]
- Vyasarayani, C.; Abdel-Rahman, E.; McPhee, J. Modeling of Contact and Stiction in Electrostatic Microcantilever Actuators. J. Nanotechnol. Eng. Med. 2012, 3, 011003. [Google Scholar] [CrossRef]
- Lin, L.Y.; Keeler, E.G. Progress of MEMS Scanning Micromirrors for Optical Bio-Imaging. Micromachines 2015, 6, 1675–1689. [Google Scholar] [CrossRef]
- Meinel, K.; Melzer, M.; Stoeckel, C.; Shaporin, A.; Kuhn, H. 2D Scanning Micromirror with Large Scan Angle and Monolithically Integrated Angle Sensors Based on Piezoelectric Thin Film Aluminum Nitride. Sensors 2020, 20, 6599. [Google Scholar] [CrossRef]
- Shao, J.; Li, Q.; Feng, C.; Li, W.; Yu, H. AlN based piezoelectric micromirror. Opt. Lett. 2018, 43, 987–990. [Google Scholar] [CrossRef] [PubMed]
- Gu-Stoppel, S.; Lisec, T.; Fichtner, S.; Funck, N.; Müller-Groeling, A. A highly linear piezoelectric quasi-static MEMS mirror with mechanical tilt angles of larger than 10°. In Proceedings of the MOEMS and Miniaturized Systems XVIII, San Francisco, CA, USA, 2–7 February 2019. [Google Scholar]
- Zhang, Y.; Liu, Y.; Wang, L.; Su, Y.; Zhang, Y.; Yu, Z.; Zhu, W.; Wang, Y.; Wu, Z. Resolution adjustable Lissajous scanning with piezoelectric MEMS mirrors. Opt. Express 2022, 31, 2846–2859. [Google Scholar] [CrossRef]
- Baran, U.; Brown, D.; Holmstrom, S.; Balma, D.; Davis, W.O.; Muralt, P.; Urey, H. Resonant PZT MEMS Scanner for High-Resolution Displays. J. Microelectromech. Syst. 2012, 21, 1303–1310. [Google Scholar] [CrossRef]
- Lei, H.; Wen, Q.; Yu, F.; Li, D.; Shang, Z.; Huang, J.; Wen, Z. AlN film based piezoelectric large-aperture MEMS scanning micromirror integrated with angle sensors. J. Micromech. Microeng. 2018, 28, 115012. [Google Scholar] [CrossRef]
- Kanno, I. Piezoelectric MEMS: Ferroelectric thin films for MEMS applications. Jpn. J. Appl. Phys. 2018, 57, 040101. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Y.; Wang, L.; Liu, Y.; Chen, H.; Wu, Z. Process Control Monitor (PCM) for Simultaneous Determination of the Piezoelectric Coefficients d31 and d33 of AlN and AlScN Thin Films. Micromachines 2022, 13, 581. [Google Scholar] [CrossRef]
- Su, Y.; Liu, Y.; Fei, Y.; Wang, L.; Cai, J.; Chen, S.; Wu, Z. A two-step wet etching process of PZT thin film with ultra-low undercut for MEMS applications. Sens. Actuators A Phys. 2023, 394, 114014. [Google Scholar] [CrossRef]
- Hofmann, U.; Janes, J.; Quenzer, H.-J. High-Q MEMS Resonators for Laser Beam Scanning Displays. Micromachines 2012, 3, 509–528. [Google Scholar] [CrossRef]
- Mishra, C.; Peles, Y. Cavitation in flow through a micro-orifice inside a silicon microchannel. Phys. Fluids 2004, 17, 013601. [Google Scholar] [CrossRef]
- Caupin, F.; Herbert, E. Cavitation in water: A review. Comptes Rendus Phys. 2006, 7, 1000–1017. [Google Scholar] [CrossRef]
- Dular, M.; Bachert, B.; Stoffel, B.; Širok, B. Relationship between cavitation structures and cavitation damage. Wear 2004, 257, 1176–1184. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Mirror Size | Actuating Method | Chip size |
|---|---|---|---|
| [10] | D = 2 mm | electrostatic | 5.2 × 5.2 × 0.6 mm3 |
| [11] | 5 × 3 mm2 | electromagnetic | 15 × 13 × 12 mm3 * |
| [12] | 12 × 4 mm2 * | electromagnetic | 15 × 15 × 15 mm3 |
| [13] | 1 × 1 mm2 | electrothermal | 2 × 2 × 3 mm3 |
| [15] | 6 × 4 mm2 | electromagnetic | 16 × 16 × 13 mm3 |
| this work | D = 10 mm | piezoelectric | 25 × 25 × 1 mm3 |
| Parameter | Value |
|---|---|
| mirror diameter | 10 mm |
| actuator thickness | |
| mirror thickness | |
| frame width | 2.5 mm |
| chip size | 25 mm × 25 mm × 1 mm |
| chip mass | 0.5 g |
| Parameter | Value |
|---|---|
| resonant frequency in air | 1011 Hz |
| resonant frequency in water | 297 Hz |
| tilting angle under DC driving | ±0.18° |
| tilting angle under AC driving at resonant frequency | ±5.5° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Liu, Y.; Su, Y.; Wang, Y.; Zhang, Y.; Chen, H.; Wang, L.; Wu, Z. Water-Immersible MEMS Mirror with a Large Optical Aperture. Micromachines 2024, 15, 235. https://doi.org/10.3390/mi15020235
Yang Y, Liu Y, Su Y, Wang Y, Zhang Y, Chen H, Wang L, Wu Z. Water-Immersible MEMS Mirror with a Large Optical Aperture. Micromachines. 2024; 15(2):235. https://doi.org/10.3390/mi15020235
Chicago/Turabian StyleYang, Yi, Yichen Liu, Yongquan Su, Yang Wang, Yonggui Zhang, Hao Chen, Lihao Wang, and Zhenyu Wu. 2024. "Water-Immersible MEMS Mirror with a Large Optical Aperture" Micromachines 15, no. 2: 235. https://doi.org/10.3390/mi15020235