
Design and Algorithm Integration of High-Precision Adaptive Underwater Detection System Based on MEMS Vector Hydrophone

 and
and
Abstract
1. Introduction
2. Principles and Methods
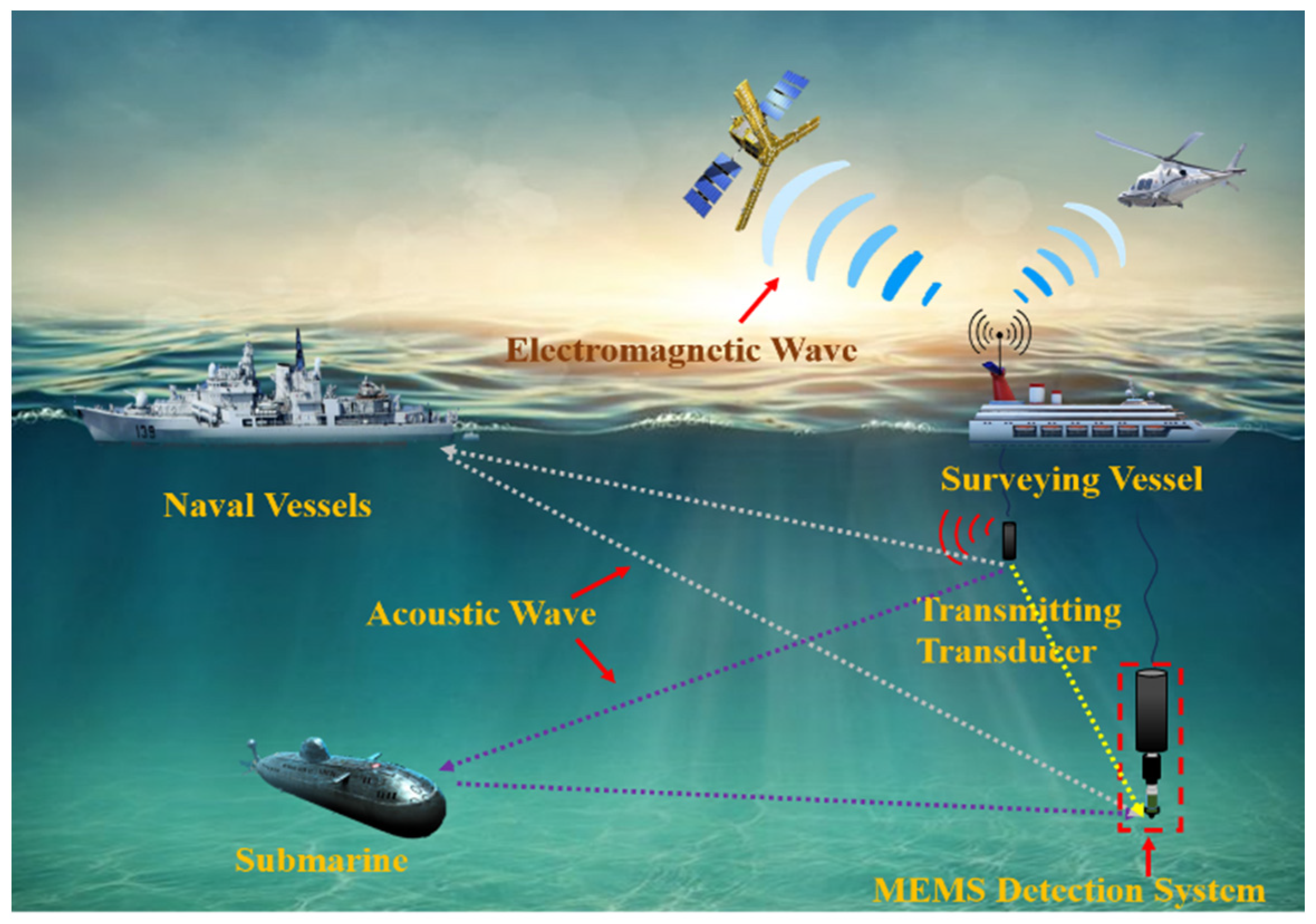
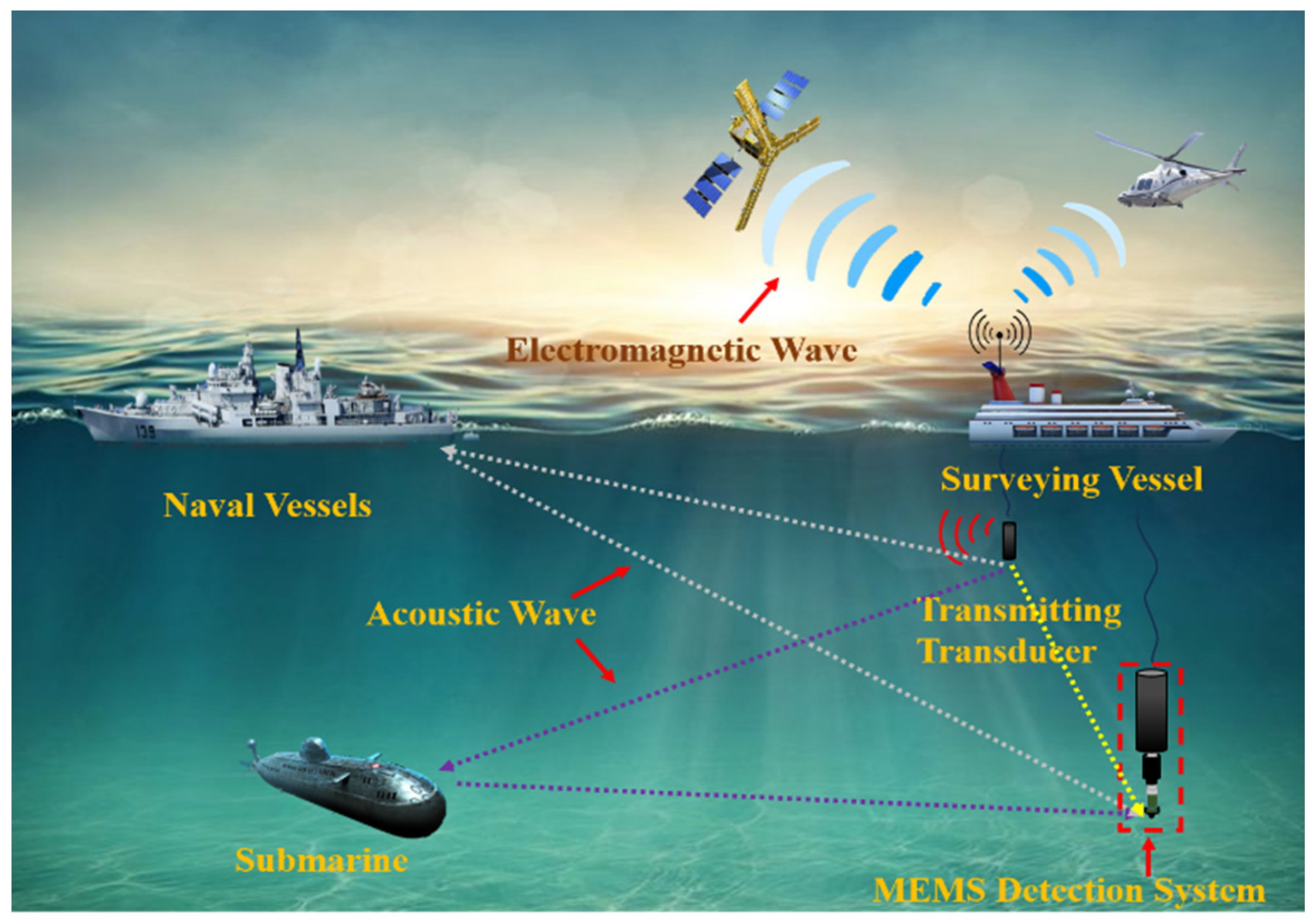
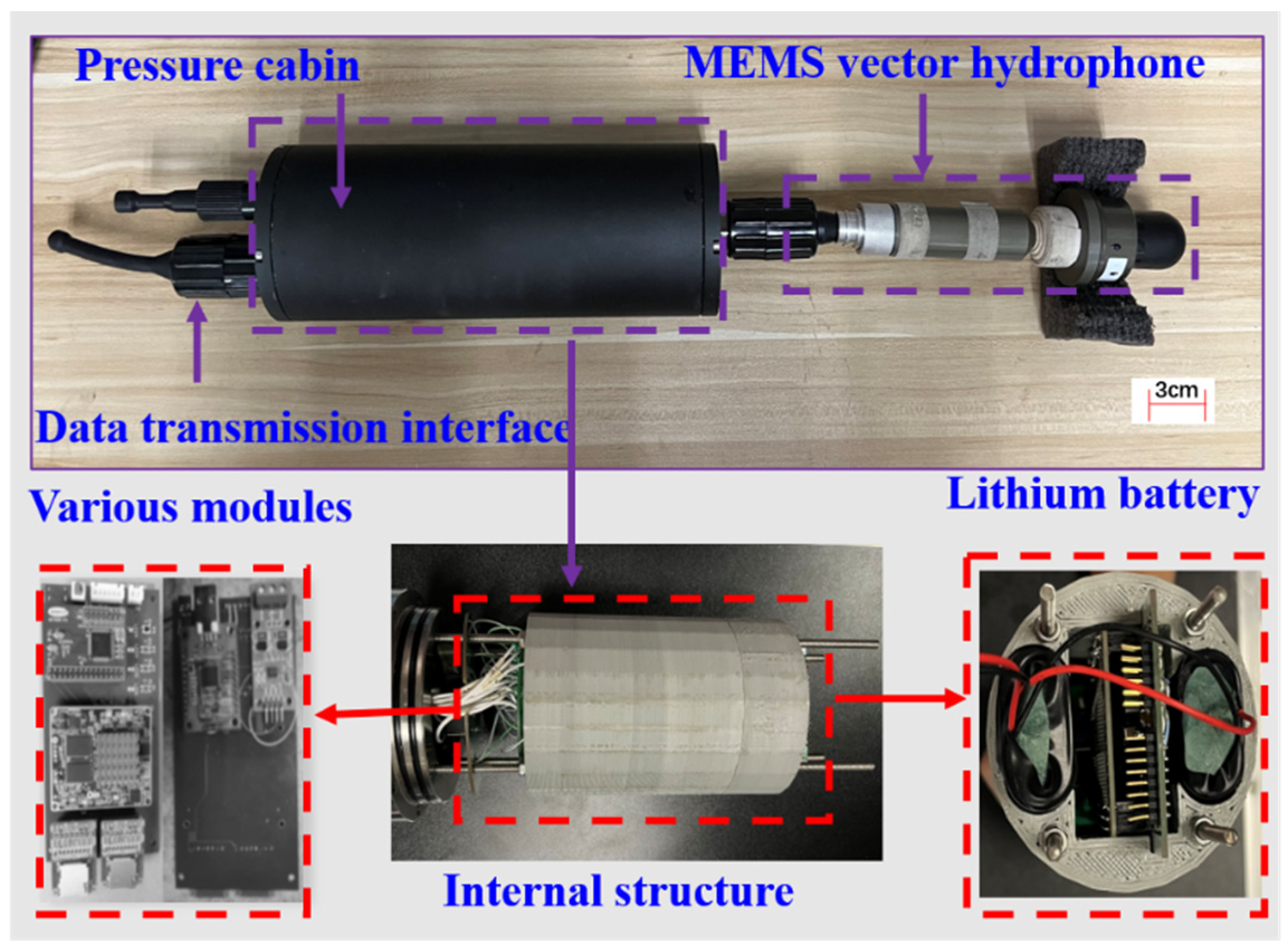
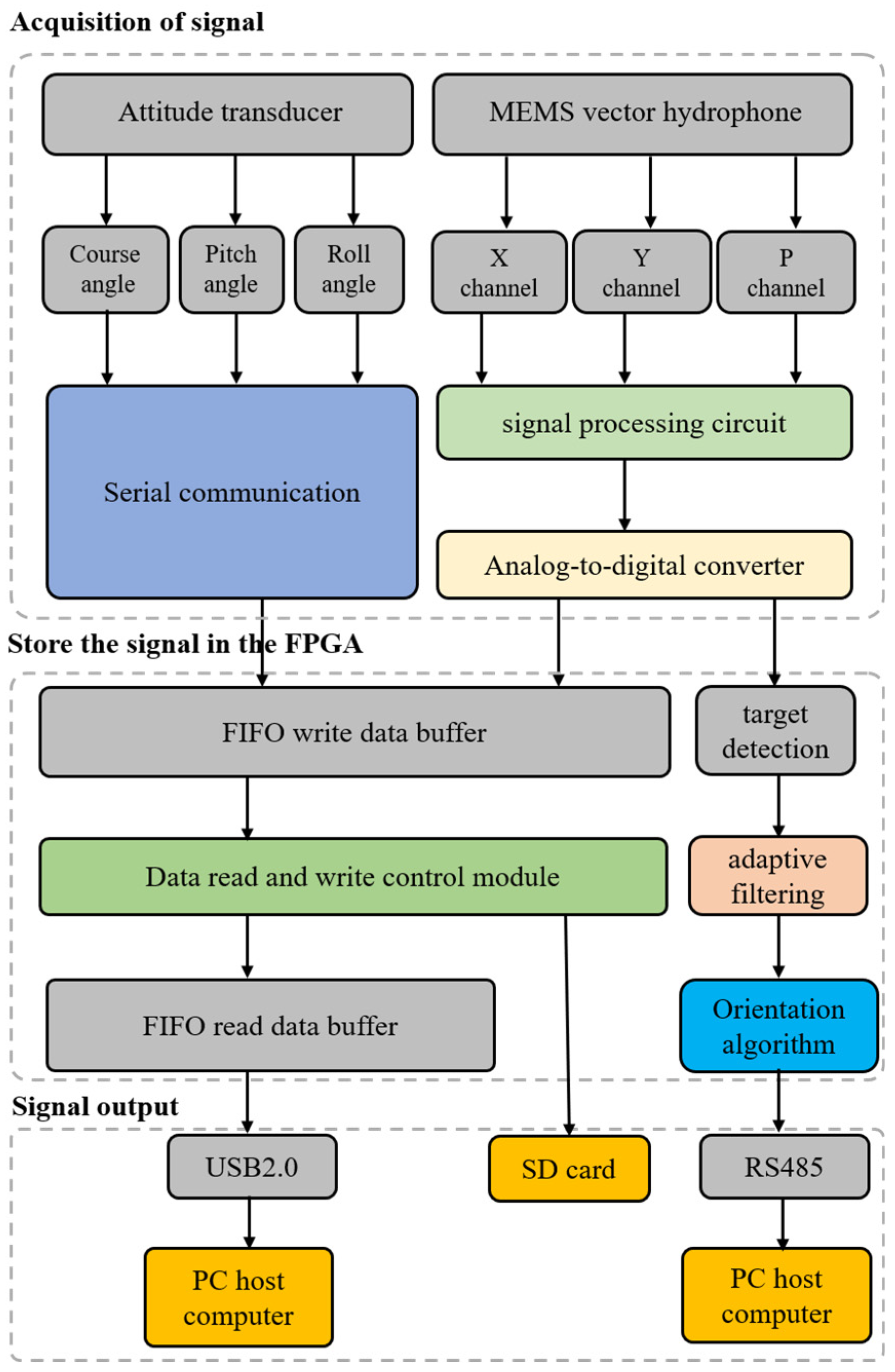
2.1. Design of MEMS Detection System
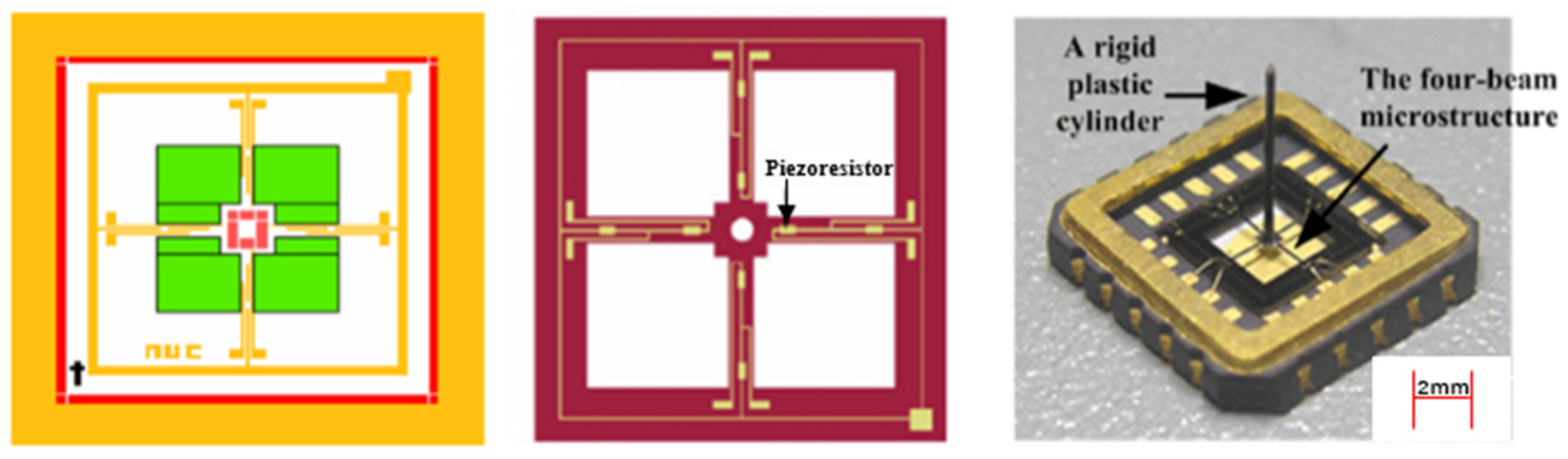
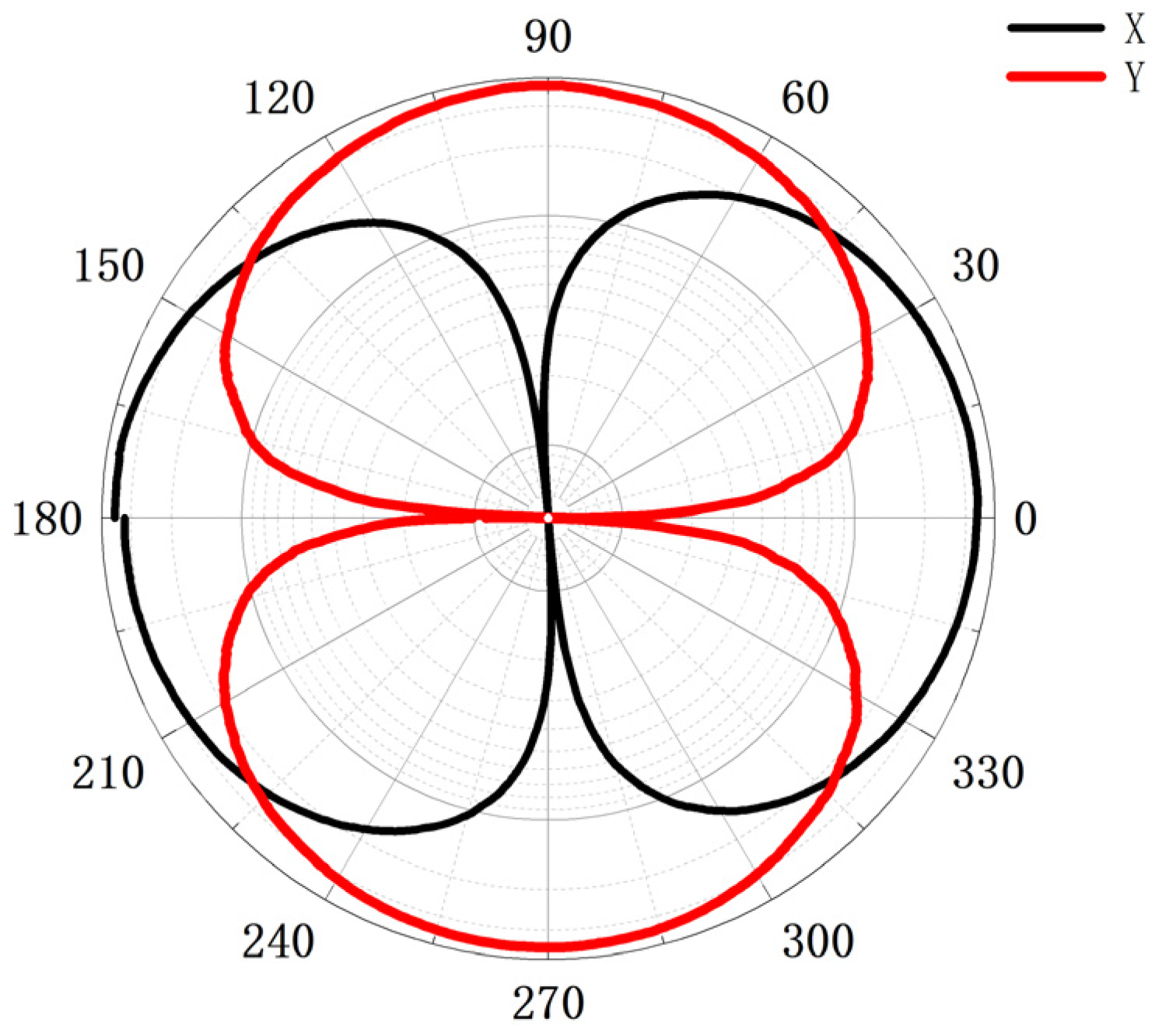
2.2. Sensing Principle of MEMS Vector-Sensitive Probe
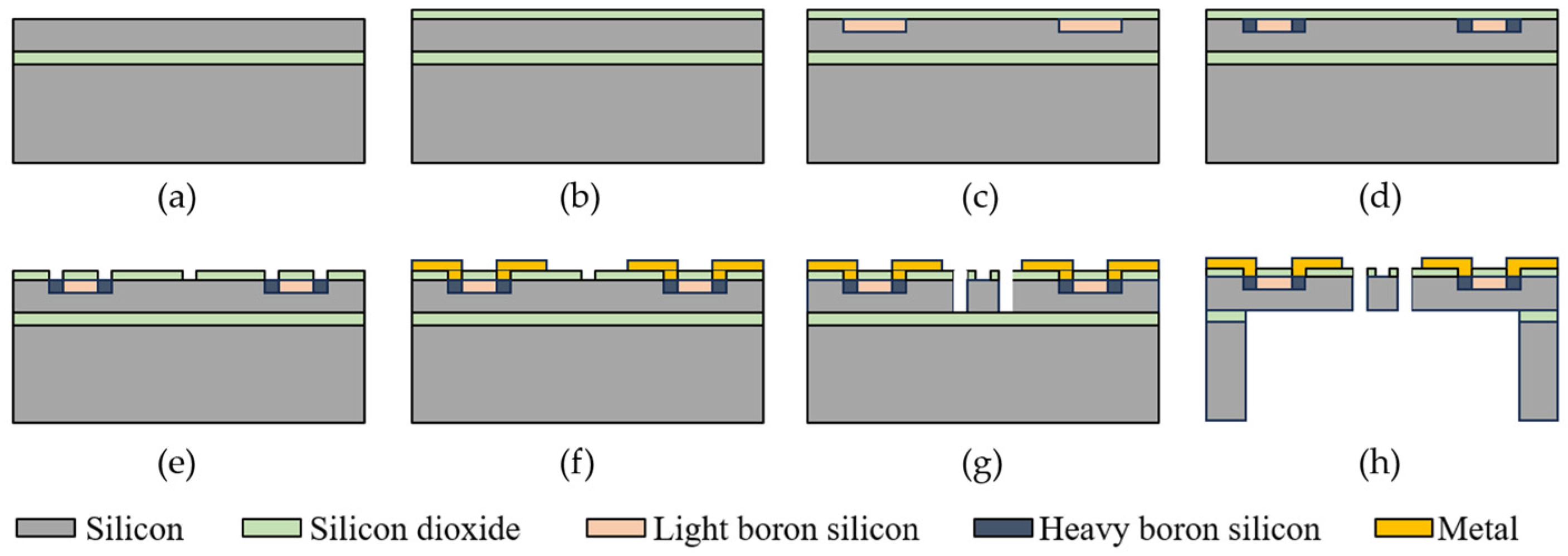
- (a)
- The wafer is subjected to acid and alkaline cleaning to remove surface organic matter, particulate contaminants, and metal impurities. Subsequently, it is rinsed multiple times with deionized water and dried with nitrogen to meet the cleanliness requirements for thermal oxidation and deposition processes on the wafer.
- (b)
- Plasma-enhanced chemical vapor deposition (PECVD) is used to form a 20 nm thick oxide layer on the wafer surface, aiming to reduce lattice damage and achieve electrical isolation of the metal.
- (c)
- The first photolithography is performed on the front side to inject B ions into the pressure resistance region, with an injection dose of 4.0 × 1014 cm2 and an injection energy of 80 keV. Subsequently, high-temperature annealing is conducted in a nitrogen environment at 1050 °C for 120 min.
- (d)
- The second photolithography is carried out on the front side to inject B ions into the heavily doped region, with an injection dose of 3 × 1015 cm2 and an injection energy of 110 keV. Then, annealing is performed at 1000 °C for 30 min.
- (e)
- The third photolithography on the front side utilizes reactive ion etching (RIE) to etch the oxide layer, exposing the heavily doped silicon region and the center positioning hole.
- (f)
- The fourth photolithography on the front side involves depositing aluminum metal on the surface using sputtering technology. Subsequently, metal patterning is achieved using a lift-off process. Then, alloy annealing is conducted at 200 °C to form ohmic contact between the metal and the heavily doped region. At this point, the pressure resistance structure is formed.
- (g)
- The fifth photolithography on the front side employs RIE technology to etch the deposited silicon oxide and device layer silicon, forming the four-beam-central block area.
- (h)
- The sixth photolithography on the back side employs deep reactive ion etching (DRIE) technology to etch the back chamber. Then, the buried oxide layer is etched using HF buffer solution (BOE) to release the four-beam-central block structure.

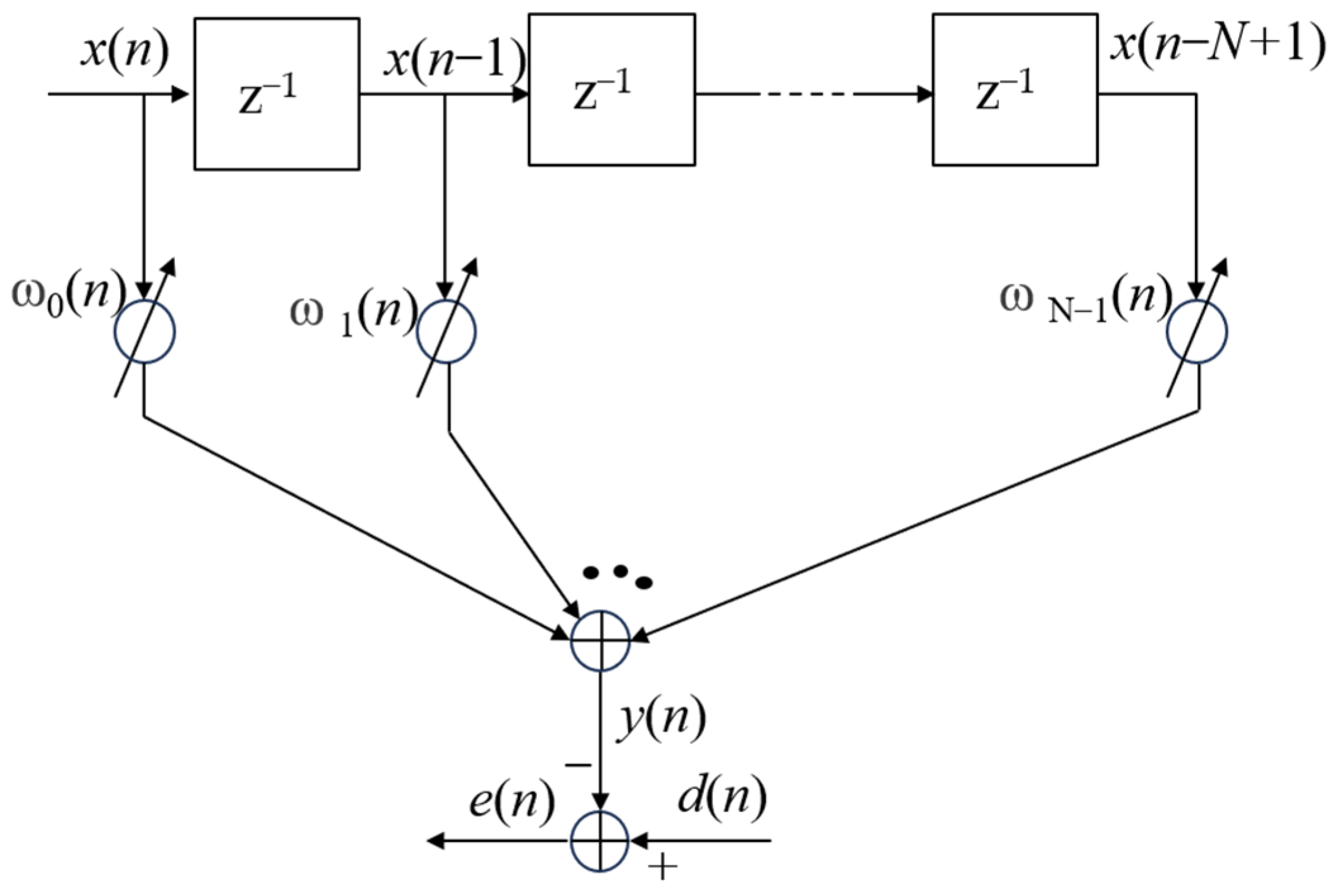
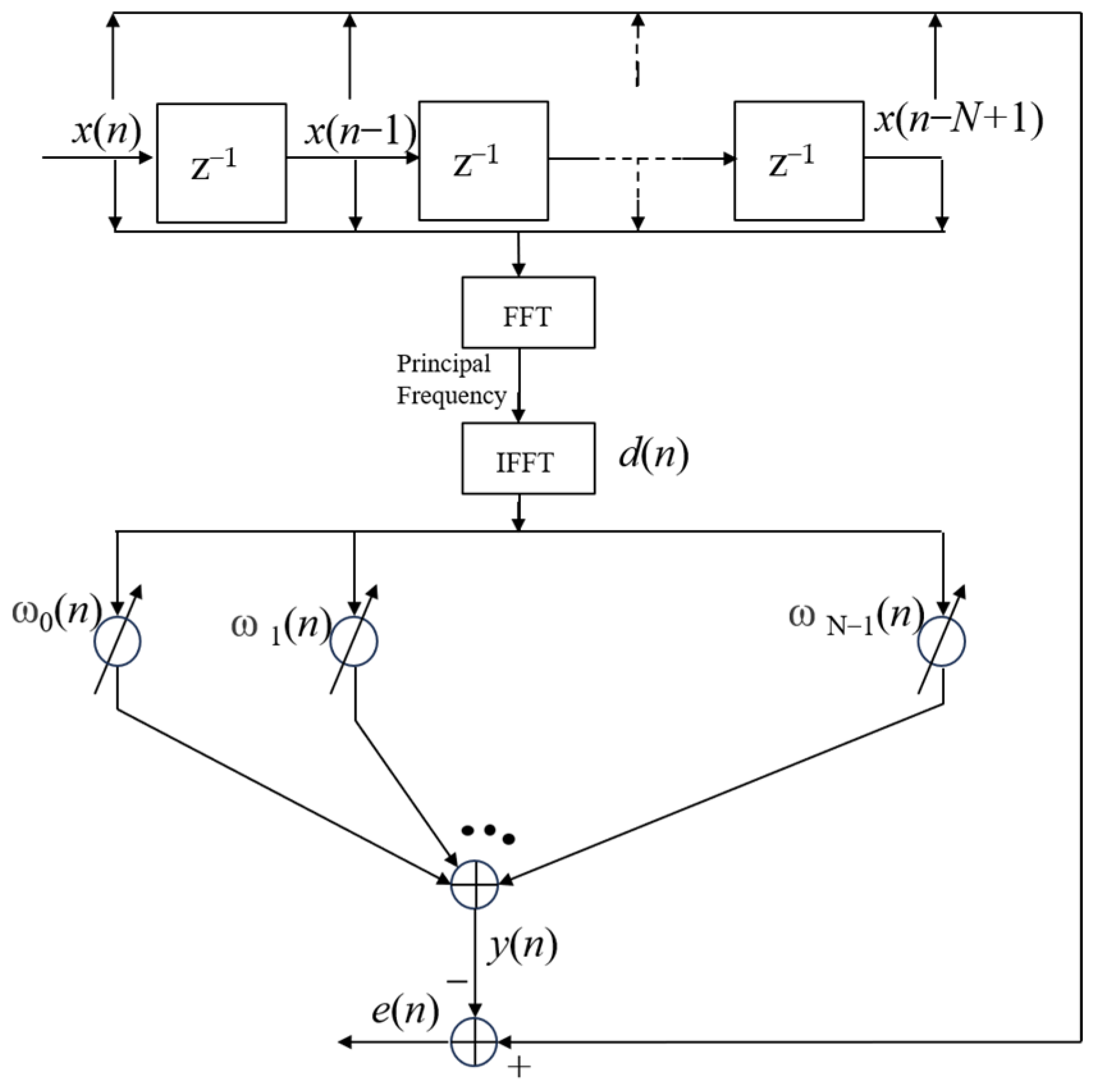
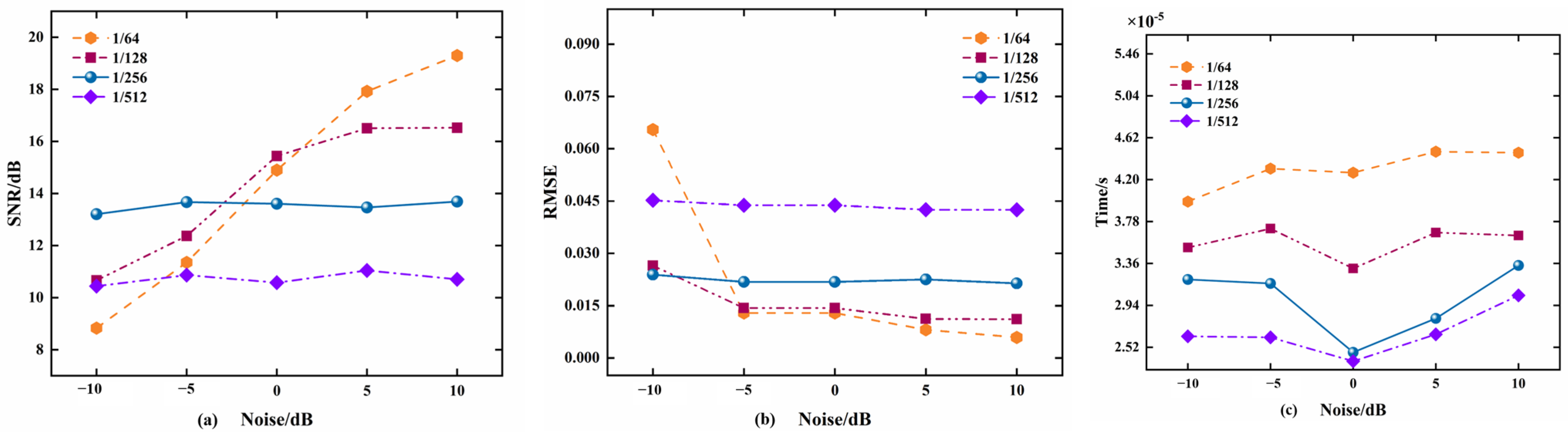
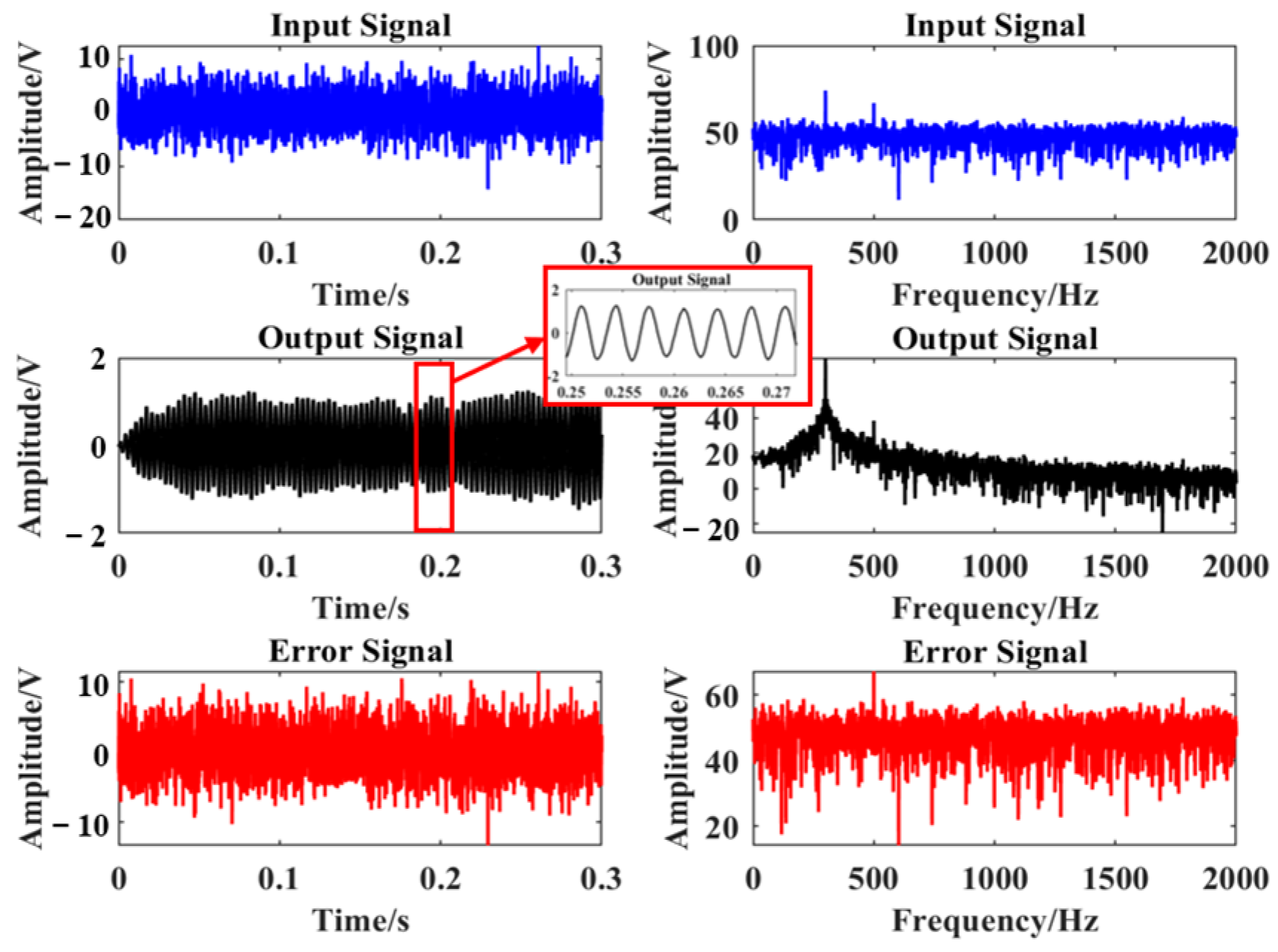
2.3. LMS Adaptive Signal Processing Method and Improvements
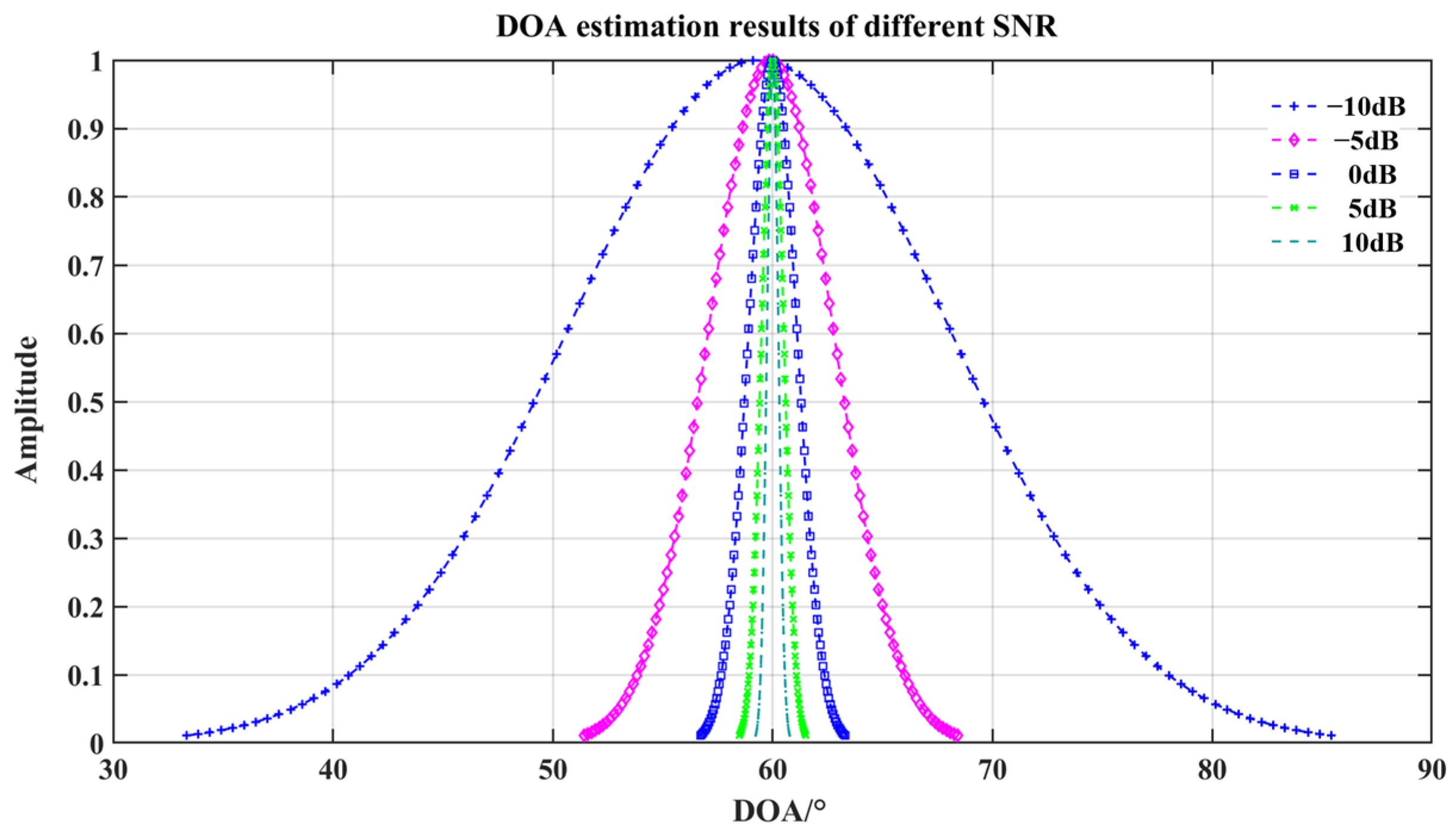
2.4. DOA Estimation and Simulation
3. Experiment
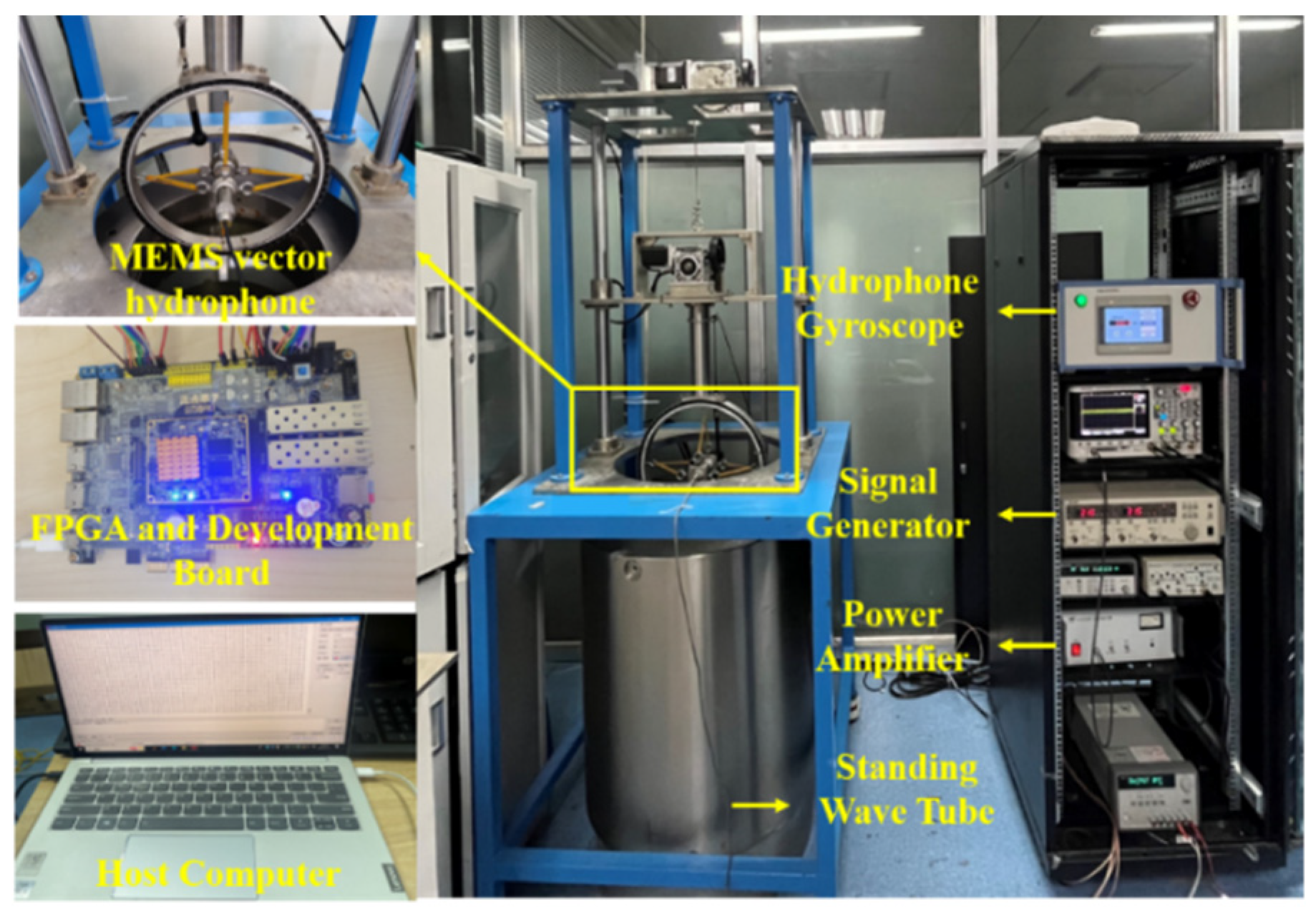
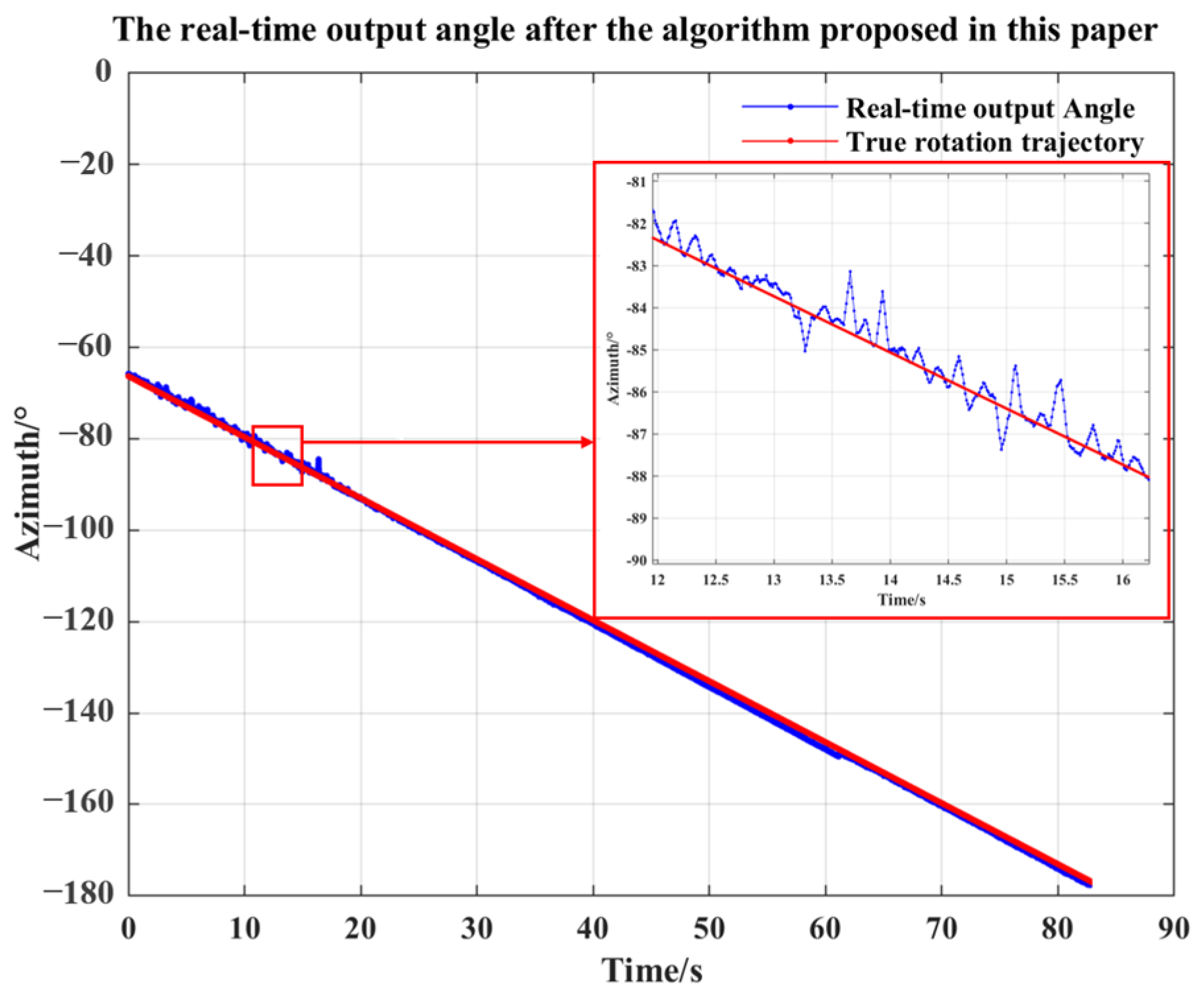
3.1. Indoor Experiment
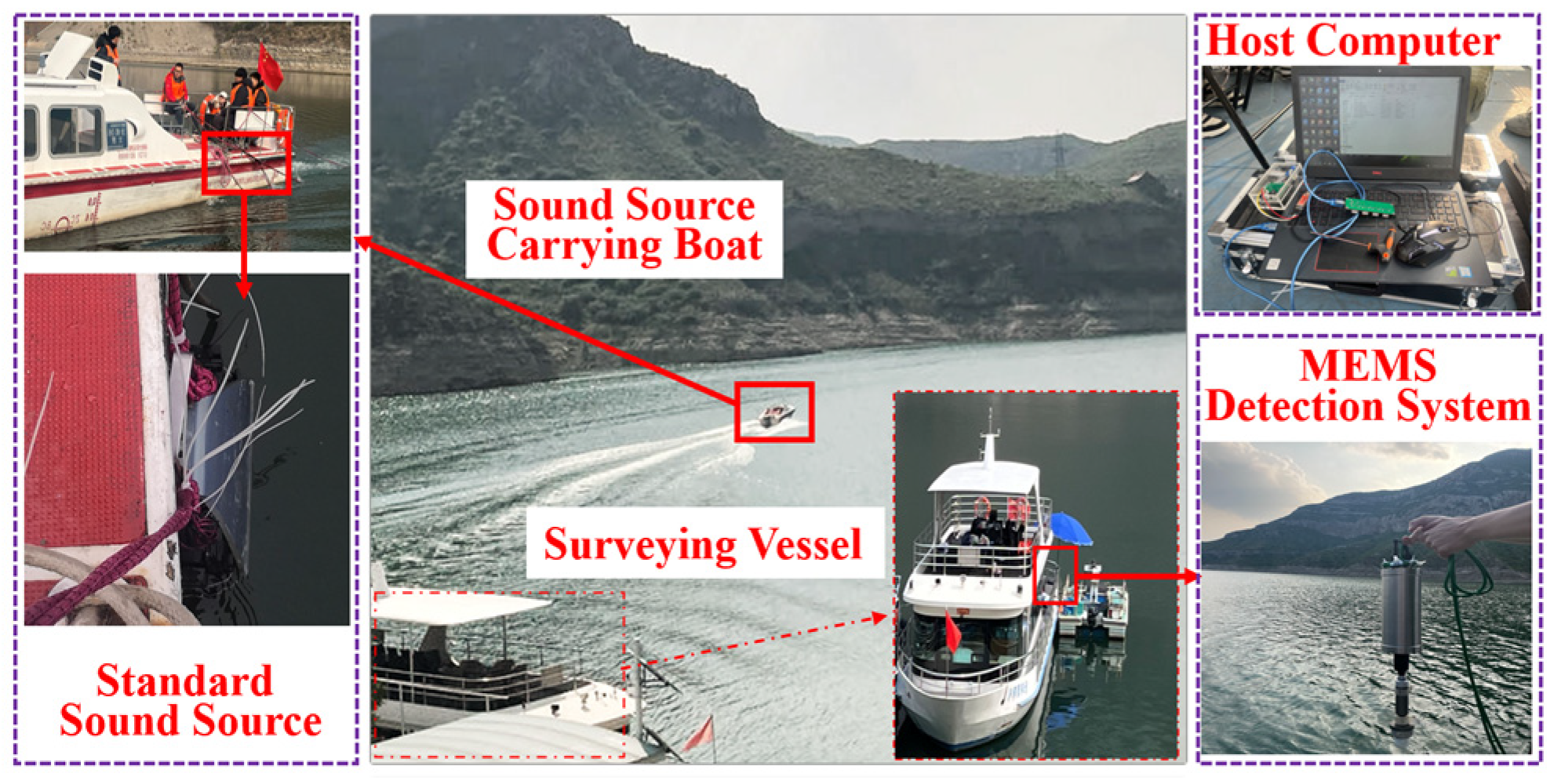
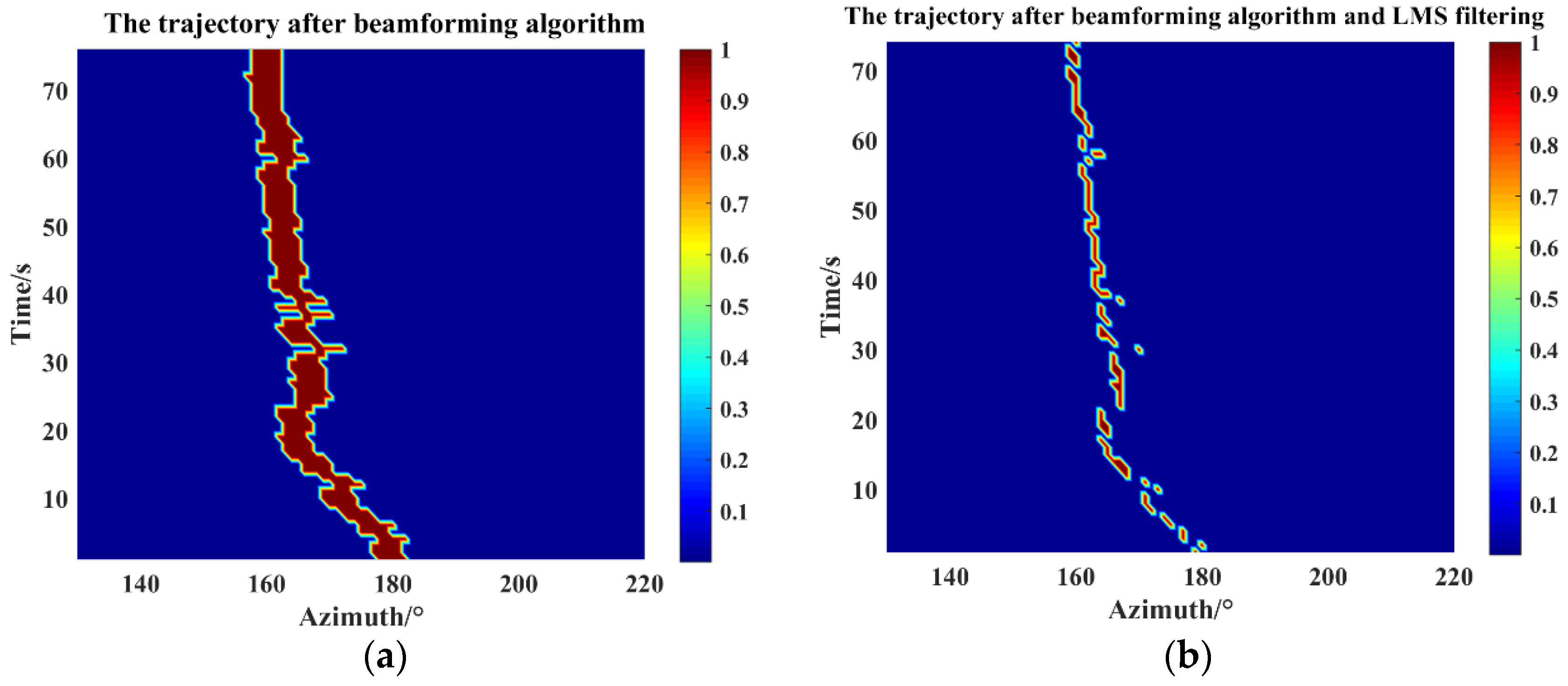
3.2. Field Experiment
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Manz, J.; Dehe, A.; Schrag, G. Modeling High Signal-to-Noise Ratio in a Novel Silicon MEMS Microphone with Comb Readout. In Smart Sensors, Actuators, and MEMS VIII, Proceedings of the SPIE-International Society for Optics and Photonics, Barcelona, Spain, 8–11 May 2017; Institute for Physics of Electrotechnology, Technical University of Munich: Munich, Germany, 2017. [Google Scholar]
- Zhu, S.; Zhang, G.; Shang, Z.; Yang, X.; Lv, T.; Liang, X.; Zhang, X.; Chen, P.; Zhang, W. Design and realization of cap-shaped cilia MEMS vector hydrophone. Measurement 2021, 183, 109818. [Google Scholar] [CrossRef]
- Zhou, F.; Fan, J.; Wang, B.; Zhou, Y.; Huang, J. Acoustic barcode based on the acoustic scattering characteristics of underwater targets. Appl. Acoust. 2022, 189, 108607. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill Book Company: New York, NY, USA, 1983. [Google Scholar]
- Chung, D.; Kim, J. Underwater visual mapping of curved ship hull surface using stereo vision. Auton. Robot. 2023, 47, 10071. [Google Scholar] [CrossRef]
- Choi, H.M.; Yang, H.S.; Seong, W.J. Compressive Underwater Sonar Imaging with Synthetic Aperture Processing. Remote Sens. 2021, 13, 1924. [Google Scholar] [CrossRef]
- Yang, H.; Li, J.; Sheng, M. Underwater acoustic target multi-attribute correlation perception method based on deep learning. Appl. Acoust. 2022, 190, 108644. [Google Scholar] [CrossRef]
- Song, D.; Gan, W.; Yao, P.; Zang, W.; Zhang, Z.; Qu, X. Guidance and control of autonomous surface underwater vehicles for target tracking in ocean environment by deep reinforcement learning. Ocean Eng. 2022, 250, 110947. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, G.; Wu, D.; Jia, L.; Zhang, Y.; Geng, Y.; Liu, Y.; Ren, W.; Zhang, W. High Signal-to-Noise Ratio MEMS Noise Listener for Ship Noise Detection. Remote Sens. 2023, 15, 777. [Google Scholar] [CrossRef]
- Pan, Z.; Wang, X.; Hoang, T.T.G.; Tian, L. An enhanced phase-locked loop for non-ideal grids combining linear active disturbance controller with moving average filter. Int. J. Electr. Power Energy Syst. 2023, 149, 109021. [Google Scholar] [CrossRef]
- Yang, Z.; Huo, L.; Wang, J.; Zhou, J. Denoising low SNR percussion acoustic signal in the marine environment based on the LMS algorithm. Measurement 2022, 202, 111848. [Google Scholar] [CrossRef]
- Zhu, Z.; Tong, F.; Zhou, Y.; Wu, F. Dual parameters optimization l_p-LMS for estimating underwater acoustic channel with uncertain sparsity. Appl. Acoust. 2023, 202, 109150. [Google Scholar] [CrossRef]
- Kim, S.-E.; Lee, H.-S.; Lee, J.-W.; Song, W.-J. A Variable Step-Size Diffusion LMS Algorithm for Distributed Estimation. IEEE Trans. Sign. Process. 2015, 63, 1. [Google Scholar]
- Sun, J.; Li, X.; Chen, K.; Cui, W.; Chu, M. A Novel CMA + DD_LMS Blind Equalization Algorithm for Underwater Acoustic Communication. Comput. J. 2020, 63, 974–981. [Google Scholar] [CrossRef]
- Ma, L.; Gulliver, T.A.; Zhao, A.; Zeng, C.; Wang, K. An underwater bistatic positioning system based on an acoustic vector sensor and experimental investigation. Appl. Acoust. 2021, 171, 107558. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, M.; Shen, N.; Wang, X.; Zhang, W. The Development of the Differential MEMS Vector Hydrophone. Sensors 2017, 17, 1332. [Google Scholar] [CrossRef]
- Liu, G.; Tan, H.; Li, H.; Zhang, J.; Bai, Z.; Liu, Y.; Kong, X.; Zhang, G.; Cui, J.; Yang, Y.; et al. In-Situ Observing Ciliary Biomimetic Three-Dimensional Vector Hydrophone. IEEE Sens. J. 2024, 24, 9700–9711. [Google Scholar] [CrossRef]
- Geng, Y.; Ren, W.; Zhang, G.; Chen, P.; Zhang, Y.; Liu, Y.; Li, J.; Zhang, J.; Wang, Y.; Zhang, W. Design and Fabrication of Hollow Mushroom-Like Cilia MEMS Vector Hydrophone. IEEE Trans. Instrum. Meas. 2023, 72, 9505308. [Google Scholar] [CrossRef]
- Gazor, S. Prediction in LMS-type adaptive algorithms for smoothly time varying environments. IEEE Trans. Signal Process. 1999, 47, 1735–1739. [Google Scholar] [CrossRef]
- Kubin, G. Time-varying coefficient tracking and noise suppression properties of a class of adaptive algorithms. In Proceedings of the IEEE International Conference on Acoustics, New York, NY, USA, 11–14 April 1988. [Google Scholar] [CrossRef]
- Kim, D.I.; Wilde, P.D. Performance analysis of the DCT-LMS adaptive filtering algorithm. Signal Process. 2000, 80, 1629–1654. [Google Scholar] [CrossRef]
- Took, C.C.; Mandic, D. Weight sharing for LMS algorithms: Convolutional neural networks inspired multichannel adaptive filtering. Digit. Signal Process. 2022, 127, 103580. [Google Scholar] [CrossRef]
- Department of Applied Mathematics, Tongji University. Advanced Mathematics; Higher Education Press: Beijing, China, 2014; p. 7. [Google Scholar]
- Lo, E.Y.; Junger, M.C. Signal-to-noise Enhancement by Underwater Intensity Measurements. J. Acoust. Soc. Am. 1987, 82, 1450–1454. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Acoustic Vector-sensor Correlations in Ambient Noise. IEEE J. Ocean. Eng. 2001, 26, 337–347. [Google Scholar] [CrossRef]
- Suzuki, H.; Nakamura, M.; Tichy, J. An accuracy evaluation of the sound power measurement by the use of the sound intensity and the sound pressure methods. Acoust. Fence Technol. 2007, 28, 319–327. [Google Scholar] [CrossRef]
- Chan, S.C.; Chen, H.H. Uniform Concentric Circular Arrays with Frequency-Invariant Characteristics—Theory, Design, Adaptive Beamforming and DOA Estimation. IEEE Trans. Signal Process. 2007, 55, 165–177. [Google Scholar] [CrossRef]
- Pal, P.; Vaidyanathan, P.P. Nested Arrays: A Novel Approach to Array Processing With Enhanced Degrees of Freedom. IEEE Trans. Signal Process. 2010, 58, 4167–4181. [Google Scholar] [CrossRef]
- Tran, Q.T.; Irie, Y.; Hara, S.; Nakaya, Y.; Toda, T. A Beamforming Algorithm for ESPAR Antenna with RF-MEMS Variable Riactors. In Proceedings of the IEEE Topical Conference on Wireless Communication Technology, Honolulu, HI, USA, 15–17 October 2003; The Institute of Electronics, Information and Communication Engineers: Tokyo, Japan, 2003. [Google Scholar]
- Zhu, S.; Zhang, G.; Wu, D.; Liang, X.; Zhang, Y.; Lv, T.; Liu, Y.; Chen, P.; Zhang, W. Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone. Micromachines 2022, 13, 236. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designer | Concavity Depth (dB) | Vector Channel Sensitivity (dB) | Gain Magnitude (dB) |
|---|---|---|---|
| Zhu et al. (2021 [2]) | 30 | −182.7 dB@1 kHz (0 dB~1 V/µPa) | 49.5 |
| Geng et al. (2023 [18]) | 40 | −180.9 dB@1 kHz (0 dB~1 V/µPa) | 49.5 |
| This Paper | 40 | −175.4 dB@1 kHz (0 dB~1 V/µPa) | 54.0 |
| SNR/dB | AVG/° | CI/° | Sigma | CI |
|---|---|---|---|---|
| −10 | 59.2259 | [57.2809 61.1611] | 9.7572 | [8.5630 11.3295] |
| −5 | 60.0736 | [59.5117 60.6351] | 2.8307 | [2.4854 3.7884] |
| 0 | 59.9980 | [59.8002 60.1958] | 0.9968 | [0.8752 1.1580] |
| 5 | 60.0667 | [59.9689 60.1644] | 0.4925 | [0.4324 0.5721] |
| 10 | 59.9851 | [59.9356 60.0346] | 0.2494 | [0.2190 0.2897] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Jing, B.; Zhang, G.; Pei, J.; Jia, L.; Geng, Y.; Bai, Z.; Zhang, J.; Guo, Z.; Wang, J.; et al. Design and Algorithm Integration of High-Precision Adaptive Underwater Detection System Based on MEMS Vector Hydrophone. Micromachines 2024, 15, 514. https://doi.org/10.3390/mi15040514
Liu Y, Jing B, Zhang G, Pei J, Jia L, Geng Y, Bai Z, Zhang J, Guo Z, Wang J, et al. Design and Algorithm Integration of High-Precision Adaptive Underwater Detection System Based on MEMS Vector Hydrophone. Micromachines. 2024; 15(4):514. https://doi.org/10.3390/mi15040514
Chicago/Turabian StyleLiu, Yan, Boyuan Jing, Guojun Zhang, Jiayu Pei, Li Jia, Yanan Geng, Zhengyu Bai, Jie Zhang, Zimeng Guo, Jiangjiang Wang, and et al. 2024. "Design and Algorithm Integration of High-Precision Adaptive Underwater Detection System Based on MEMS Vector Hydrophone" Micromachines 15, no. 4: 514. https://doi.org/10.3390/mi15040514
APA StyleLiu, Y., Jing, B., Zhang, G., Pei, J., Jia, L., Geng, Y., Bai, Z., Zhang, J., Guo, Z., Wang, J., Huang, Y., Xu, L., Liu, G., & Zhang, W. (2024). Design and Algorithm Integration of High-Precision Adaptive Underwater Detection System Based on MEMS Vector Hydrophone. Micromachines, 15(4), 514. https://doi.org/10.3390/mi15040514