
Modeling and Vibration Analysis of Carbon Nanotubes as Nanomechanical Resonators for Force Sensing



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
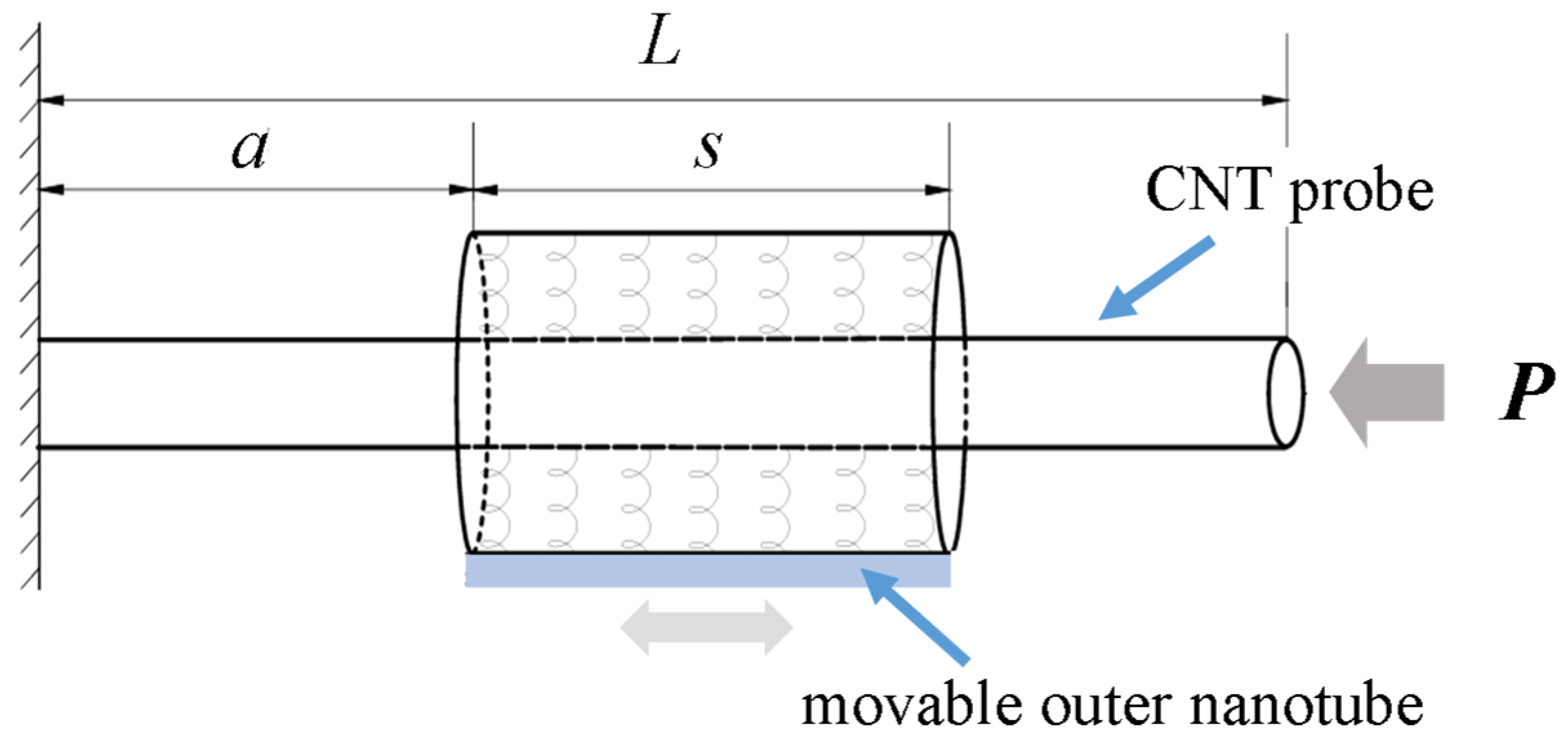
2. Modeling Procedures
2.1. Nonlocal Continuum Beam Model
2.2. Solution of Governing Equations
- (1)
- If , we obtain
- (2)
- If
- (1)
- for a fixed left end
- (2)
- for a free right end
- (3)
- for continuous conditions at the supporting position ,
- (4)
- for continuous conditions at the supporting position ,
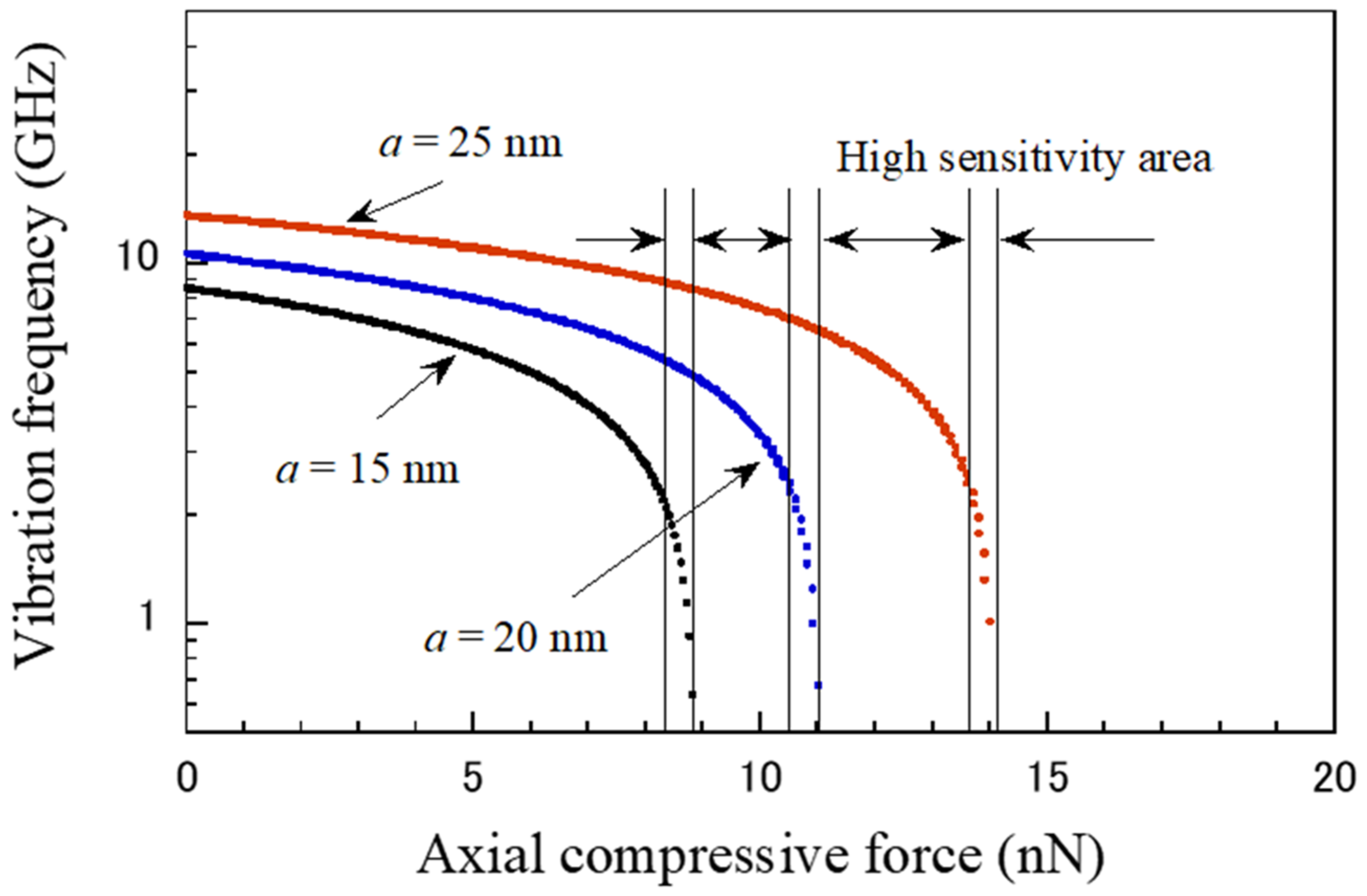
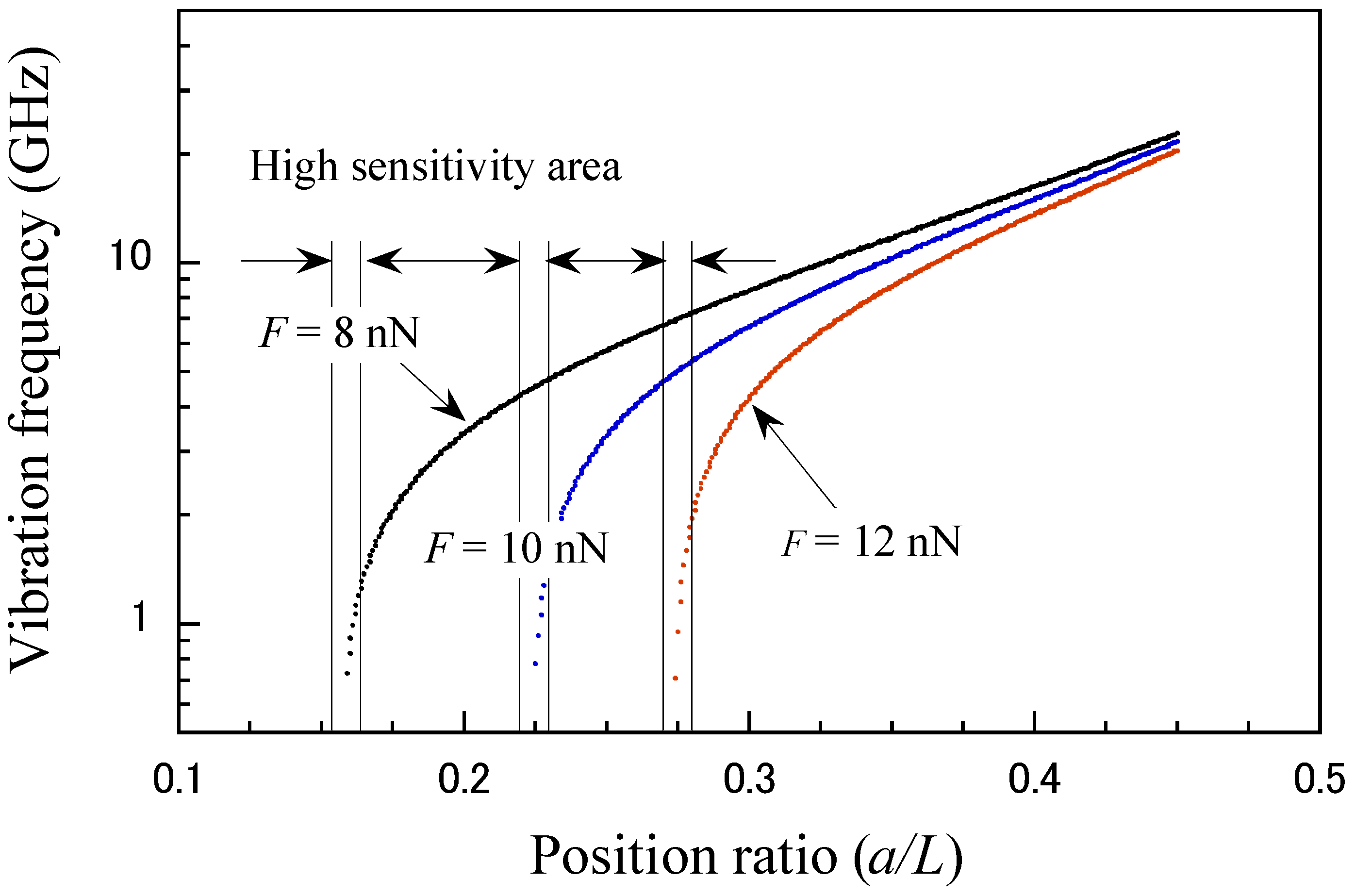
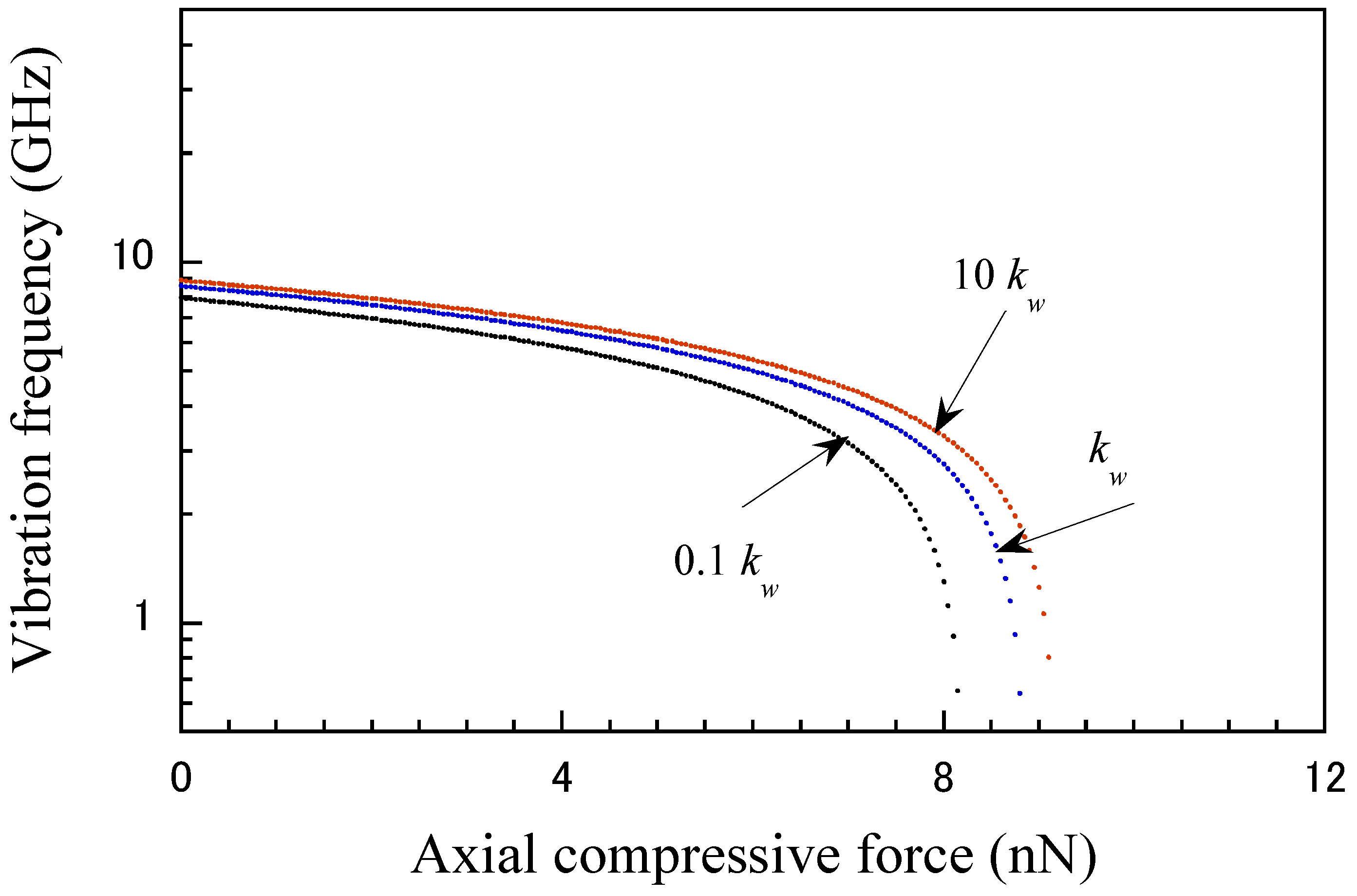
3. Simulation Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ruoff, R.S.; Qian, D.; Liu, W.K. Mechanical properties of carbon nanotubes: Theoretical predictions and experimental measurements. C. R. Phys. 2003, 4, 993–1008. [Google Scholar] [CrossRef]
- Qian, D.; Wagner, G.J.; Liu, W.K.; Yu, M.F.; Ruoff, R.S. Mechanics of carbon nanotubes. Appl. Mech. Rev. 2002, 55, 495–533. [Google Scholar] [CrossRef]
- Gardea, F.; Lagoudas, D.C. Characterization of electrical and thermal properties of carbon nanotube/epoxy composites. Compos. B Eng. 2014, 56, 611–620. [Google Scholar] [CrossRef]
- Ibrahim, K.S. Carbon nanotubes-properties and applications: A review. Carbon Lett. 2013, 14, 131–144. [Google Scholar] [CrossRef]
- Natsuki, T.; Natsuki, J. Constitutive modeling of mechanical behaviors of carbon-based CNTs and GSs, and their sensing applications as nanomechanical resonators: A review. Nanomaterials 2023, 13, 1834. [Google Scholar] [CrossRef]
- Thostenson, E.T.; Ren, Z.; Chou, T.W. Advances in the science and technology of carbon nanotubes and their composites: A review. Compos. Sci. Technol. 2001, 61, 1899–1912. [Google Scholar] [CrossRef]
- Zaporotskova, I.V.; Boroznina, N.P.; Parkhomenko, Y.N.; Kozhitov, L.V. Carbon nanotubes: Sensor properties. a review. Mod. Electron. Mater. 2016, 2, 95–105. [Google Scholar] [CrossRef]
- Huang, X.G.; Pang, R.; Yang, M.D.; Zhang, S.P.; Guo, F.M.; Xu, J.; Zhang, Y.J.; Cao, A.Y.; Shang, Y.Y. Flexible gas sensors based on carbon nanotube hybrid films: A review. Adv. Mater. Technol. 2023, 8, 2300616. [Google Scholar] [CrossRef]
- Schroeder, V.; Savagatrup, S.; He, M.; Lin, S.; Swager, T.M. Carbon nanotube chemical sensors. Chem. Rev. 2019, 119, 599–663. [Google Scholar] [CrossRef]
- Zhilyaeva, M.A.; Asiyanbola, O.A.; Lomakin, M.V.; Mironov, D.M.; Voloskov, B.S.; Mikladal, B.; Tsetsereukou, D.O.; Fedorov, F.S.; Vershinina, A.I.; Shandakov, S.D.; et al. Tunable force sensor based on carbon nanotube fiber for fine mechanical and acoustic technologies. Nanotechnology 2022, 33, 485501. [Google Scholar] [CrossRef]
- Paul, S.J.; Sharma, I.; Elizabeth, I.; Gahtori, B.; Manikandan, R.M.; Titus, S.S.; Chandra, P.; Gupta, B.K. A comparative study of compressible and conductive vertically aligned carbon nanotube forest in different polymer matrixes for high-performance piezoresistive force sensors. ACS Appl. Mater. Interfaces 2020, 12, 16946–16958. [Google Scholar] [CrossRef]
- Kim, J.S.; Kim, G.W. Hysteresis compensation of piezoresistive carbon nanotube/ polydimethylsiloxane composite-based force sensors. Sensors 2017, 17, 229. [Google Scholar] [CrossRef] [PubMed]
- Li, A.; Bogdanovich, A.E.; Bradford, P.D. Aligned carbon nanotube sheet piezoresistive strain sensors. Smart Mater. Struct. 2015, 24, 095004. [Google Scholar] [CrossRef]
- Cullinan, M.A.; Culpepper, M.L. Carbon nanotubes as piezoresistive microelectromechanical sensors: Theory and experiment. Phys. Rev. B 2010, 82, 115428. [Google Scholar] [CrossRef]
- Wen, L.; Nie, M.; Wang, C.; Zhao, Y.N.; Yin, K.; Sun, L. Multifunctional, light-weight wearable sensor based on 3D porous polyurethane sponge coated with MXene and carbon nanotubes composites. Adv. Mater. Interfaces 2022, 9, 2101592. [Google Scholar] [CrossRef]
- Fei, Y.P.; Chen, F.; Fang, W.; Xu, L.X.; Ruan, S.L.; Liu, X.H.; Zhong, M.Q.; Kuang, T.R. High-strength, flexible and cycling-stable piezo-resistive polymeric foams derived from thermoplastic polyurethane and multi-wall carbon nanotubes. Compos. B Eng. 2020, 199, 108279. [Google Scholar] [CrossRef]
- Wajahat, M.; Lee, S.; Kim, J.H.; Chang, W.S.; Pyo, J.; Cho, S.H.; Seol, S.K. Flexible strain sensors fabricated by neniscus-guided printing of carbon nanotube−polymer composites. ACS Appl. Mater. Interfaces 2018, 10, 19999–20005. [Google Scholar] [CrossRef] [PubMed]
- Tang, Z.; Jia, S.; Shi, S.; Wang, F.; Li, B. Coaxial carbon nanotube/polymer fibers as wearable piezoresistive sensors. Sens. Actuators A 2018, 284, 85–95. [Google Scholar] [CrossRef]
- Hu, N.; Karube, Y.; Yan, C.; Masuda, Z.; Fukunaga, H. Tunneling effect in a polymer/carbon nanotube nanocomposite strain sensor. Acta Mater. 2008, 56, 2929–2936. [Google Scholar] [CrossRef]
- Natsuki, T.; Endo, M.; Takahashi, T. Percolation study of orientated short-fiber composites by a continuum model. Physica A 2005, 352, 498–508. [Google Scholar] [CrossRef]
- Wang, J.; Musameh, M. Carbon nanotubes screen-printed electrochemical sensors. Analyst 2004, 129, 1–2. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Gao, W.; Emaminejad, S.; Kiriya, D.; Ota, H.; Nyein, H.Y.Y.; Takei, K.; Javey, A. Printed carbon nanotube electronics and sensor systems. Adv. Mater. 2016, 28, 4397–4414. [Google Scholar] [CrossRef] [PubMed]
- Fan, Z.; Tao, X.; Dharuman, G.; Li, X.D.; Dong, L.X. Modeling and simulation of an ultrasensitive electron tunneling position/force nanosensor. RSC Adv. 2016, 6, 8297–8302. [Google Scholar] [CrossRef]
- Kim, D.H.; Chang, K.J. Electron transport in telescoping carbon nanotubes. Phys. Rev. B 2002, 66, 155402. [Google Scholar] [CrossRef]
- Hafner, J.H.; Cheung, C.L.; Lieber, C.M. Growth of nanotubes for probe microscopy tips. Nature 1999, 398, 761–762. [Google Scholar] [CrossRef]
- Yan, Y.; Miao, J.; Yang, Z.; Xiao, F.X.; Yang, H.B.; Liu, B.; Yang, Y. Carbon nanotube catalysts: Recent advances in synthesis, characterization and applications. Chem. Soc. Rev. 2015, 44, 3295–3346. [Google Scholar] [CrossRef]
- Eveleens, C.A.; Irle, S.; Page, A.J. How does acetonitrile modulate single-walled carbon nanotube diameter during CVD growth? Carbon 2019, 146, 535–541. [Google Scholar] [CrossRef]
- Moore, K.E.; Cretu, O.; Mitome, M.; Golberg, D. In situ cyclic telescoping of multi-walled carbon nanotubes in a transmission electron microscope. Carbon 2016, 107, 225–232. [Google Scholar] [CrossRef]
- Cumings, J.; Zettl, A. Low-friction nanoscale linear bearing realized from multiwall carbon nanotubes. Science 2000, 289, 602–604. [Google Scholar] [CrossRef]
- Kang, J.W.; Byun, K.R.; Kwon, O.K.; Choi, Y.G.; Hwang, H.J. Gigahertz frequency tuner based on a telescoping double-walled carbon nanotube: Molecular dynamics simulations. Mol. Simul. 2010, 36, 418–424. [Google Scholar] [CrossRef]
- Ansari, R.; Motevalli, B. On new aspect of nested carbon nanotubes as Giahertz oscullators. J. Vib. Acoust. 2011, 133, 051003. [Google Scholar] [CrossRef]
- Legoas, S.B.; Coluci, V.R.; Braga, S.F.; Coura, P.Z.; Dantas, S.O.; Galvao, D.S. Molecular-dynamics simulations of carbon nanotubes as gigahertz oscillators. Phys. Rev. Lett. 2003, 90, 055504. [Google Scholar] [CrossRef] [PubMed]
- Kang, J.W.; Lee, K.W. Engineering the resonance frequency of carbon-nanotube oscillators via a telescoping outertube. J. Korean Phys. Soc. 2014, 64, 1586–1589. [Google Scholar] [CrossRef]
- Zhang, W.; Xi, Z.H.; Zhang, G.M.; Li, C.Y.; Guo, D.Z. Multiple telescoping extension of multiwalled carbon nanotubes and its application in atomic force microscopy. J. Phys. Chem. C 2008, 112, 14714–14717. [Google Scholar] [CrossRef]
- Jensen, K.; Girit, C.; Mickelson, W.; Zettl, A. Tunable nanoresonators constructed from telescoping nanotubes. Phys. Rev. Lett. 2006, 96, 215503. [Google Scholar] [CrossRef]
- Natsuki, T.; Ni, Q.Q.; Elishakoff, I. Influence of the axial compression on the natural frequency of AFM probes using double-walled carbon nanotubes with different wall lengths. Appl. Phys. A 2013, 110, 1–7. [Google Scholar] [CrossRef]
- Cao, G.X.; Chen, X.; Kysar, J.W. Strain sensing of carbon nanotubes: Numerical analysis of the vibrational frequency of deformed single-wall carbon nanotubes. Phys. Rev. B 2005, 72, 195412. [Google Scholar] [CrossRef]
- Nejad, M.Z.; Hadi, A. Eringen’s non-local elasticity theory for bending analysis of bi-directional functionally graded Euler–Bernoulli nano-beams. Int. J. Eng. Sci. 2016, 106, 1–9. [Google Scholar] [CrossRef]
- Abdollahi, R.; Boroomand, B. Nonlocal elasticity defined by Eringen’s integral model: Introduction of a boundary layer method. Int. J. Solids Struct. 2014, 51, 1758–1780. [Google Scholar] [CrossRef]
- Eringen, A.C. Plane waves in nonlocal micropolar elasticity. Int. J. Eng. Sci. 1984, 22, 1113–1121. [Google Scholar] [CrossRef]
- Heireche, H.; Tounsi, A.; Benzair, A.; Mechab, I. Sound wave propagation in single-walled carbon nanotubes with initial axial stress. J. Appl. Phys. 2011, 110, 124322. [Google Scholar] [CrossRef]
- Kumar, D.; Heinrich, C.; Waas, A.M. Buckling analysis of carbon nanotubes modeled using nonlocal continuum theories. J. Appl. Phys. 2008, 103, 073521. [Google Scholar] [CrossRef]
- Zhang, Y.Q.; Liu, G.R.; Xie, X.Y. Free transverse vibrations of double-walled carbon nanotubes using a theory of nonlocal elasticity. Phys. Rev. B 2005, 71, 195404. [Google Scholar] [CrossRef]
- Yoon, J.; Ru, C.Q.; Mioduchowski, A. Noncoaxial resonance of an isolated multiwall carbon nanotube. Phys. Rev. B 2002, 66, 233402. [Google Scholar] [CrossRef]
- Suna, C.; Liu, K. Dynamic column buckling of multi-walled carbon nanotubes under axial impact load. Solid State Commun. 2009, 149, 429–433. [Google Scholar] [CrossRef]
- Enomoto, K.; Kitakata, S.; Yasuhara, T.; Ohtake, N.; Kuzumaki, T.; Mitsuda, Y. Measurement of Young’s modulus of carbon nanotubes by nanoprobe manipulation in a transmission electron microscope. Appl. Phys. Lett. 2006, 88, 153115. [Google Scholar] [CrossRef]
- Batra, R.C.; Gupta, S.S. Wall thickness and radial breathing modes of single-walled carbon nanotubes. J. Appl. Mech. 2008, 75, 061010. [Google Scholar] [CrossRef]
- Lei, X.W.; Natsuki, T.; Shi, J.X.; Ni, Q.Q. Radial breathing vibration of double-walled carbon nanotubes subjected to pressure. Phys. Lett. A 2011, 375, 2416–2421. [Google Scholar] [CrossRef]
- Yap, H.W.; Lakes, R.S.; Carpick, R.W. Mechanical instabilities of individual multiwalled carbon nanotubes under cyclic axial compression. Nano Lett. 2007, 7, 1149–1154. [Google Scholar] [CrossRef]
- Shima, H. Buckling of carbon nanotubes: A state of the art review. Materials 2011, 5, 47–84. [Google Scholar] [CrossRef]
- Akita, S.; Nishio, M.; Nakayama, Y. Buckling of multiwall carbon nanotubes under axial compression. Jpn. J. Appl. Phys. 2006, 45, 5586. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, C.M. The constitutive relation and small scale parameter of nonlocal continuum mechanics for modelling carbon nanotubes. Nanotechnology 2007, 18, 075702. [Google Scholar] [CrossRef] [PubMed]
- Natsuki, T.; Matsuyama, N.; Ni, Q.Q. Vibration analysis of carbon nanotube-based resonator using nonlocal elasticity theory. Appl. Phys. A 2015, 120, 1309–1313. [Google Scholar] [CrossRef]
- Hosseini-Hashemi, S.; Nazemnezhad, R.; Bedroud, M. Surface effects on nonlinear free vibration of functionally graded nanobeams using nonlocal elasticity. Appl. Math. Model 2014, 38, 3538–3553. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Natsuki, J.; Lei, X.-W.; Wu, S.; Natsuki, T. Modeling and Vibration Analysis of Carbon Nanotubes as Nanomechanical Resonators for Force Sensing. Micromachines 2024, 15, 1134. https://doi.org/10.3390/mi15091134
Natsuki J, Lei X-W, Wu S, Natsuki T. Modeling and Vibration Analysis of Carbon Nanotubes as Nanomechanical Resonators for Force Sensing. Micromachines. 2024; 15(9):1134. https://doi.org/10.3390/mi15091134
Chicago/Turabian StyleNatsuki, Jun, Xiao-Wen Lei, Shihong Wu, and Toshiaki Natsuki. 2024. "Modeling and Vibration Analysis of Carbon Nanotubes as Nanomechanical Resonators for Force Sensing" Micromachines 15, no. 9: 1134. https://doi.org/10.3390/mi15091134
APA StyleNatsuki, J., Lei, X.-W., Wu, S., & Natsuki, T. (2024). Modeling and Vibration Analysis of Carbon Nanotubes as Nanomechanical Resonators for Force Sensing. Micromachines, 15(9), 1134. https://doi.org/10.3390/mi15091134