A Physics-Informed Assembly of Feed-Forward Neural Network Engines to Predict Inelasticity in Cross-Linked Polymers


Abstract
:1. Introduction
2. Non-Linear Features in Cross-Linked Polymers
3. Physics-Based Reduction
3.1. Continuum Mechanics
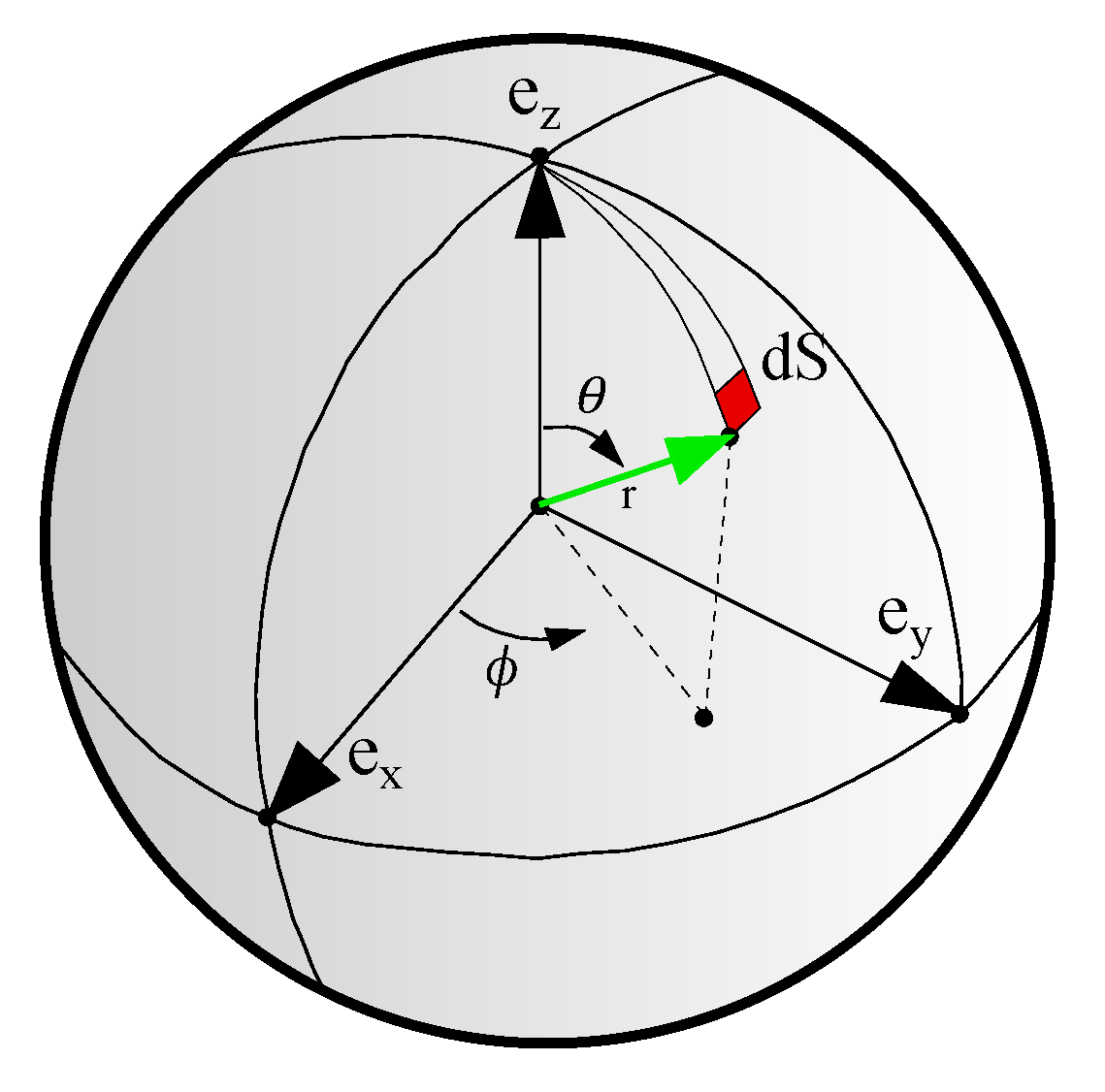
3.2. Micro-Sphere
3.3. Network Decomposition
4. Implementation to Rubber Inelasticity
4.1. Minimizing Data Requirement for Training
4.1.1. Dataset Minimization
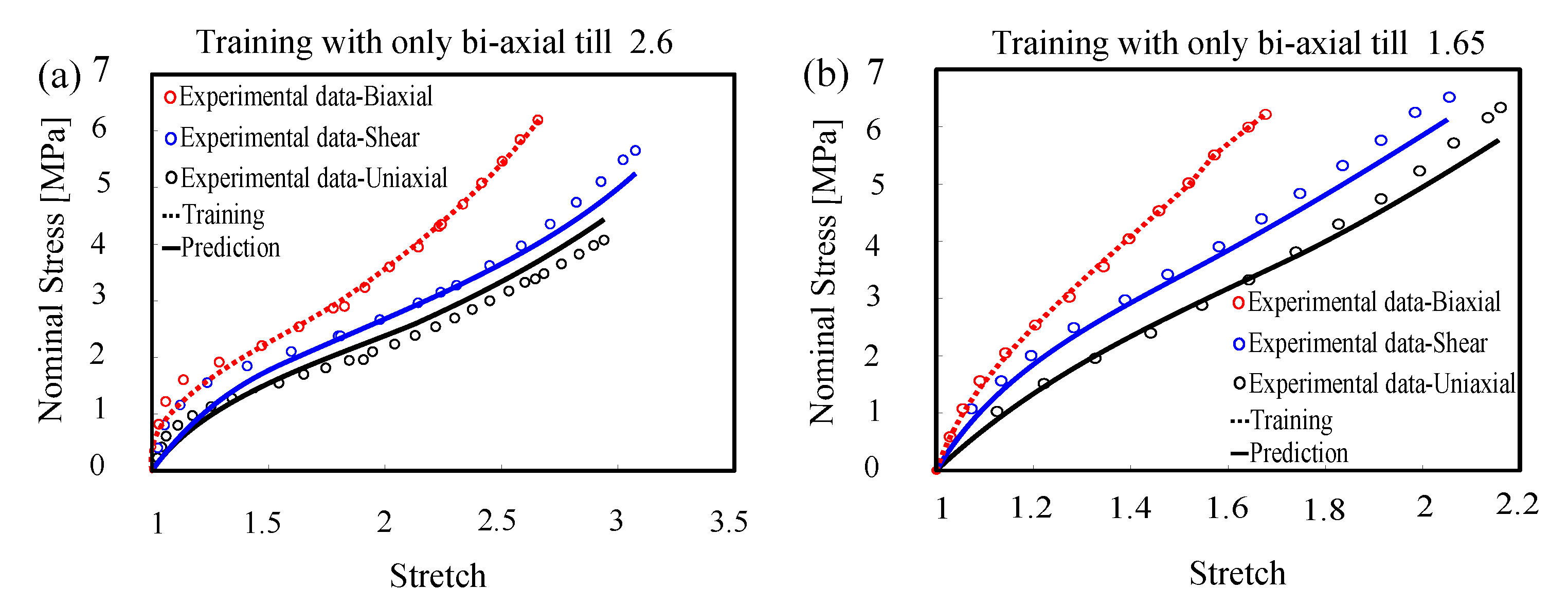
- Training with uni-axial only vs. bi-axial only. Mars dataset which has three modes of pure shear, uni-axial, and bi-axial tensile tests have been used [56]. In first case, the model is trained by bi-axial data only until and validated against other modes (see Figure 5a). Confidence interval in uni-axial and pure shear predictions is also limited to .In the second case, the model is trained by uni-axial data only until and validated against other modes (see Figure 5b). Confidence interval in shear will be limited to but in bi-axial will be dramatically reduced to due to the uncertainty in training L-agent 2.
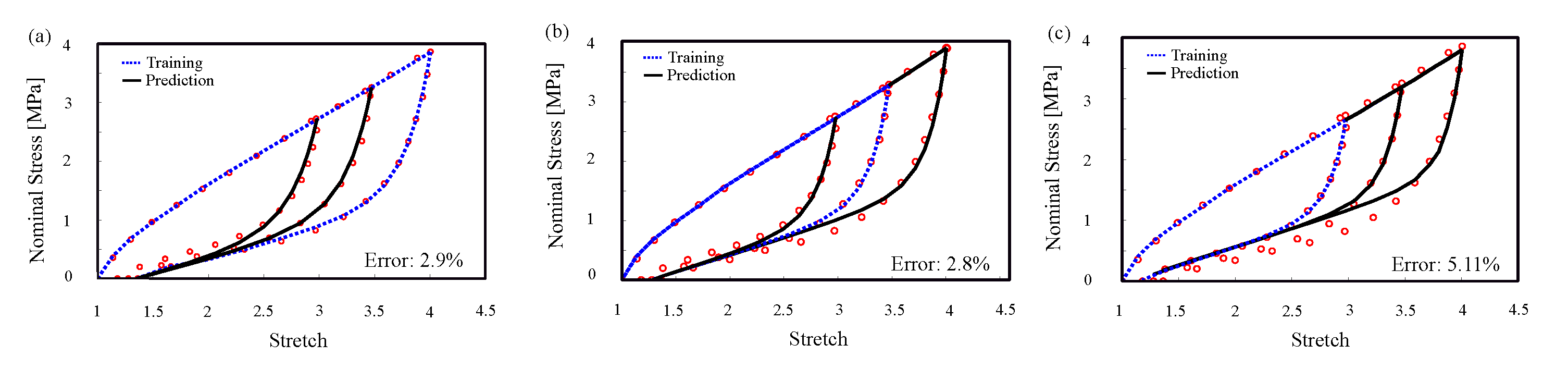
- Training with uni-axial only over a long range. Here, we showed that we can improve the confidence interval of one agent not only by choosing the games in which it has high contribution, but also by increasing the length of the game in which one agent has small contribution. In essence, we can have a short game with high contribution, or long game with low contribution. In case of rubber, uni-axial tension is a game in which the 2nd L-agent has a low contribution. Therefore, here we show that for a sufficiently long game (uni-axial until ), we can increase the confidence interval for the second L-agent (bi-axial until ), see Figure 5c Treloar dataset which has three modes of pure shear, uni-axial, and bi-axial tensile tests that have been used [57].
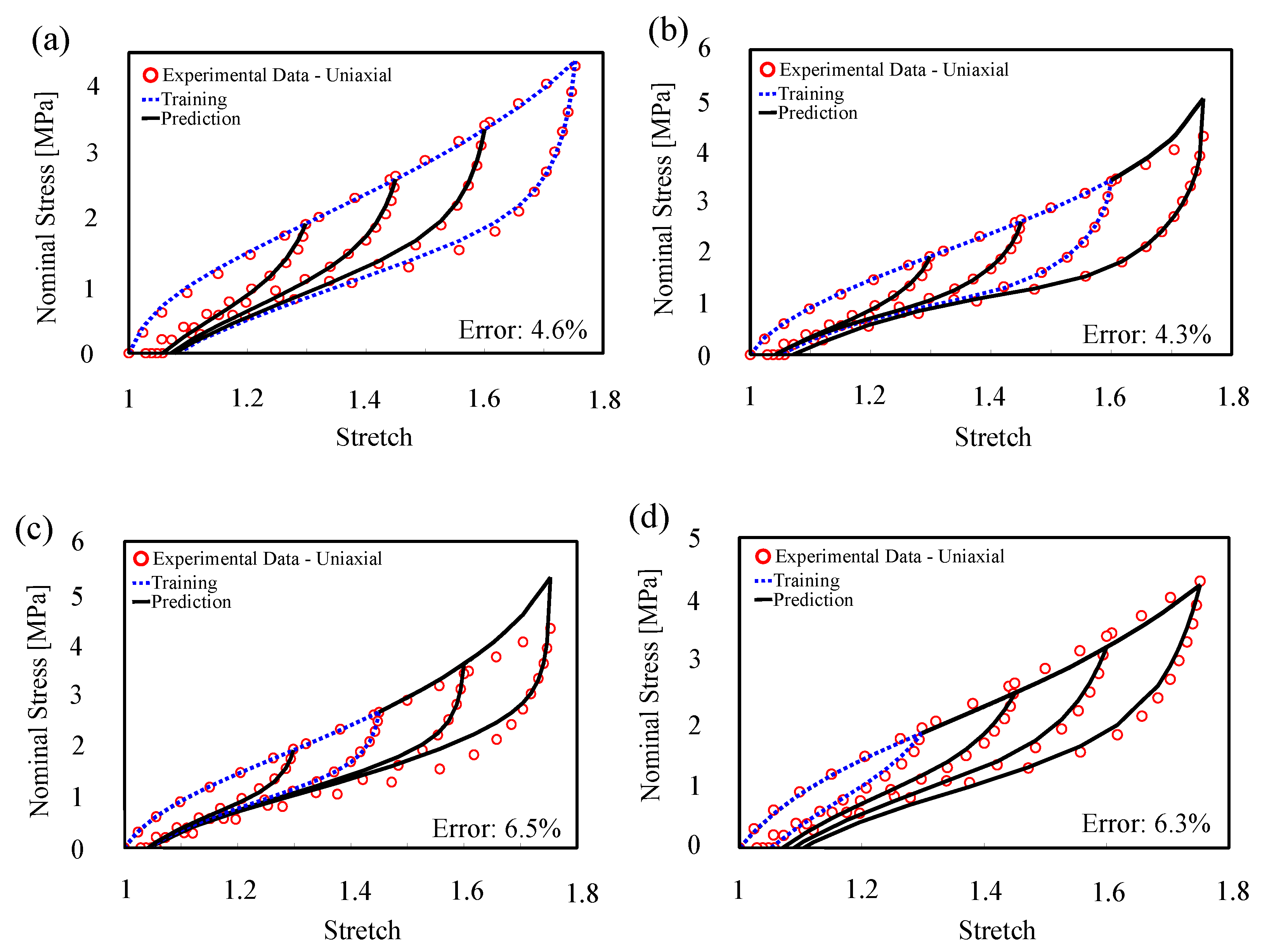
- Training with uni-axial tension and compression. Here, we showed that we can improve the confidence interval by using multiple games to train the agents. So, here the model is trained by uni-axial tensile (till ) and compression data (till ). The confidence in training of the 1st L-agent is mainly defined by the uni-axial tensile test while that of the 2nd L-agent is formed by compression test. The predictions of the trained agents were validated against other modes (see Figure 5d), and as expected confidence interval in bi-axial until and pure shear predictions is also limited to . Heuillet dataset with three modes of pure shear, uni-axial and bi-axial tensile tests have been used for training/validation [58].
4.1.2. Accuracy within Confidence Interval
4.1.3. Damage Prediction and Deformation History
4.1.4. Convergence Outside of the Confidence Interval
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Frame Independency
Appendix B. Thermodynamic Consistency
Appendix B.1. Polyconvexity
Appendix B.2. Second Law of Thermodynamic
Appendix C. Integration Point of Micro-Sphere Approach

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| 1 | 0.0 | 0.0 | 1.0 | 0.0265214244093 |
| 2 | 0.0 | 1.0 | 0.0 | 0.0265214244093 |
| 3 | 1.0 | 0.0 | 0.0 | 0.0265214244093 |
| 4 | 0.0 | 0.707106781187 | 0.707106781187 | 0.0199301476312 |
| 5 | 0.0 | 0.707106781187 | 0.707106781187 | 0.0199301476312 |
| 6 | 0.707106781187 | 0.0 | 0.707106781187 | 0.0199301476312 |
| 7 | 0.707106781187 | 0.0 | 0.707106781187 | 0.0199301476312 |
| 8 | 0.707106781187 | 0.707106781187 | 0.0 | 0.0199301476312 |
| 9 | 0.707106781187 | 0.707106781187 | 0.0 | 0.0199301476312 |
| 10 | 0.836095596749 | 0.387907304067 | 0.387907304067 | 0.0250712367487 |
| 11 | 0.836095596749 | 0.387907304067 | 0.387907304067 | 0.0250712367487 |
| 12 | 0.836095596749 | 0.387907304067 | 0.387907304067 | 0.0250712367487 |
| 13 | 0.836095596749 | 0.387907304067 | 0.387907304067 | 0.0250712367487 |
| 14 | 0.387907304067 | 0.836095596749 | 0.387907304067 | 0.0250712367487 |
| 15 | 0.387907304067 | 0.836095596749 | 0.387907304067 | 0.0250712367487 |
| 16 | 0.387907304067 | 0.836095596749 | 0.387907304067 | 0.0250712367487 |
| 17 | 0.387907304067 | 0.836095596749 | 0.387907304067 | 0.0250712367487 |
| 18 | 0.387907304067 | 0.387907304067 | 0.836095596749 | 0.0250712367487 |
| 19 | 0.387907304067 | 0.387907304067 | 0.836095596749 | 0.0250712367487 |
| 20 | 0.387907304067 | 0.387907304067 | 0.836095596749 | 0.0250712367487 |
| 21 | 0.387907304067 | -0.387907304067 | 0.836095596749 | 0.0250712367487 |
References
- Farhangi, V.; Karakouzian, M.; Geertsema, M. Effect of Micropiles on Clean Sand Liquefaction Risk Based on CPT and SPT. Appl. Sci. 2020, 10, 3111. [Google Scholar] [CrossRef]
- Farhangi, V.; Karakouzian, M. Effect of fiber reinforced polymer tubes filled with recycled materials and concrete on structural capacity of pile foundations. Appl. Sci. 2020, 10, 1554. [Google Scholar] [CrossRef] [Green Version]
- Izadi, A.; Anthony, R.J. A plasma-based gas-phase method for synthesis of gold nanoparticles. Plasma Proc. Polym. 2019, 16, e1800212. [Google Scholar] [CrossRef]
- Sinha, M.; Izadi, A.; Anthony, R.; Roccabianca, S. A novel approach to finding mechanical properties of nanocrystal layers. Nanoscale 2019, 11, 7520–7526. [Google Scholar] [CrossRef] [PubMed]
- Izadi, A.; Toback, B.; Sinha, M.; Millar, A.; Bigelow, M.; Roccabianca, S.; Anthony, R. Mechanical and Optical Properties of Stretchable Silicon Nanocrystal/Polydimethylsiloxane Nanocomposites. Phys. Status Solidi (a) 2020, 217, 2000015. [Google Scholar] [CrossRef]
- Marckmann, G.; Verron, E. Comparison of hyperelastic models for rubber-like materials. Rubber Chem. Technol. 2006, 79, 835–858. [Google Scholar] [CrossRef] [Green Version]
- Steinmann, P.; Hossain, M.; Possart, G. Hyperelastic models for rubber-like materials: Consistent tangent operators and suitability for Treloar’s data. Arch. Appl. Mech. 2012, 82, 1183–1217. [Google Scholar] [CrossRef]
- Shojaeifard, M.; Sheikhi, S.; Baniassadi, M.; Baghani, M. On finite bending of visco-hyperelastic materials: A novel analytical solution and FEM. Acta Mech. 2020, 231, 3435–3450. [Google Scholar] [CrossRef]
- Shojaeifard, M.; Baghani, M.; Shahsavari, H. Rutting investigation of asphalt pavement subjected to moving cyclic loads: An implicit viscoelastic–viscoplastic–viscodamage FE framework. Int. J. Pavement Eng. 2020, 21, 1393–1407. [Google Scholar] [CrossRef]
- Liu, W.K.; Karniakis, G.; Tang, S.; Yvonnet, J. A Computational Mechanics Special Issue on: Data-Driven Modeling and Simulation—Theory, Methods, and Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Montáns, F.J.; Chinesta, F.; Gómez-Bombarelli, R.; Kutz, J.N. Data-driven modeling and learning in science and engineering. CR Mécanique 2019, 347, 845–855. [Google Scholar] [CrossRef]
- Lu, X.; Giovanis, D.G.; Yvonnet, J.; Papadopoulos, V.; Detrez, F.; Bai, J. A data-driven computational homogenization method based on neural networks for the nonlinear anisotropic electrical response of graphene/polymer nanocomposites. Comput. Mech. 2019, 64, 307–321. [Google Scholar] [CrossRef]
- Chen, G.; Li, T.; Chen, Q.; Ren, S.; Wang, C.; Li, S. Application of deep learning neural network to identify collision load conditions based on permanent plastic deformation of shell structures. Comput. Mech. 2019, 64, 435–449. [Google Scholar] [CrossRef]
- Vahidi-Moghaddam, A.; Mazouchi, M.; Modares, H. Memory-augmented system identification with finite-time convergence. IEEE Control Syst. Lett. 2020, 5, 571–576. [Google Scholar] [CrossRef]
- Tamhidi, A.; Kuehn, N.; Ghahari, S.F.; Taciroglu, E.; Bozorgnia, Y. Conditioned Simulation of Ground Motion Time Series using Gaussian Process Regression. engrXiv 2020. [Google Scholar] [CrossRef]
- Bock, F.E.; Aydin, R.C.; Cyron, C.J.; Huber, N.; Kalidindi, S.R.; Klusemann, B. A review of the application of machine learning and data mining approaches in continuum materials mechanics. Front. Mater. 2019, 6, 110. [Google Scholar] [CrossRef] [Green Version]
- Kirchdoerfer, T.; Ortiz, M. Data-driven computational mechanics. Comput. Methods Appl. Mech. Eng. 2016, 304, 81–101. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, L.T.K.; Keip, M.A. A data-driven approach to nonlinear elasticity. Comput. Struct. 2018, 194, 97–115. [Google Scholar] [CrossRef]
- Leygue, A.; Coret, M.; Réthoré, J.; Stainier, L.; Verron, E. Data-based derivation of material response. Comput. Methods Appl. Mech. Eng. 2018, 331, 184–196. [Google Scholar] [CrossRef]
- Stainier, L.; Leygue, A.; Ortiz, M. Model-free data-driven methods in mechanics: Material data identification and solvers. Comput. Mech. 2019, 64, 381–393. [Google Scholar] [CrossRef] [Green Version]
- Kanno, Y. Mixed-integer programming formulation of a data-driven solver in computational elasticity. Optim. Lett. 2019, 13, 1505–1514. [Google Scholar] [CrossRef] [Green Version]
- Breitkopf, P.; Coelho, R.F. Multidisciplinary Design Optimization in Computational Mechanics; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Amores, V.J.; Benítez, J.M.; Montáns, F.J. Average-chain behavior of isotropic incompressible polymers obtained from macroscopic experimental data. A simple structure-based WYPiWYG model in Julia language. Adv. Eng. Softw. 2019, 130, 41–57. [Google Scholar] [CrossRef]
- Ibanez, R.; Abisset-Chavanne, E.; Aguado, J.V.; Gonzalez, D.; Cueto, E.; Chinesta, F. A manifold learning approach to data-driven computational elasticity and inelasticity. Arch. Comput. Methods Eng. 2018, 25, 47–57. [Google Scholar] [CrossRef] [Green Version]
- Ibañez, R.; Borzacchiello, D.; Aguado, J.V.; Abisset-Chavanne, E.; Cueto, E.; Ladevèze, P.; Chinesta, F. Data-driven non-linear elasticity: Constitutive manifold construction and problem discretization. Comput. Mech. 2017, 60, 813–826. [Google Scholar] [CrossRef]
- Amores, V.J.; Benítez, J.M.; Montáns, F.J. Data-driven, structure-based hyperelastic manifolds: A macro-micro-macro approach to reverse-engineer the chain behavior and perform efficient simulations of polymers. Comput. Struct. 2020, 231, 106209. [Google Scholar] [CrossRef]
- Ibáñez, R.; Abisset-Chavanne, E.; González, D.; Duval, J.L.; Cueto, E.; Chinesta, F. Hybrid constitutive modeling: Data-driven learning of corrections to plasticity models. Int. J. Mater. Form. 2019, 12, 717–725. [Google Scholar] [CrossRef]
- Latorre, M.; Montáns, F.J. WYPiWYG hyperelasticity without inversion formula: Application to passive ventricular myocardium. Comput. Struct. 2017, 185, 47–58. [Google Scholar] [CrossRef]
- Miñano, M.; Montáns, F.J. WYPiWYG damage mechanics for soft materials: A data-driven approach. Arch. Comput. Methods Eng. 2018, 25, 165–193. [Google Scholar] [CrossRef]
- Bhattacharjee, S.; Matouš, K. A nonlinear manifold-based reduced order model for multiscale analysis of heterogeneous hyperelastic materials. J. Comput. Phys. 2016, 313, 635–653. [Google Scholar] [CrossRef] [Green Version]
- Fritzen, F.; Kunc, O. Two-stage data-driven homogenization for nonlinear solids using a reduced order model. Eur. J. Mech. A/Solids 2018, 69, 201–220. [Google Scholar] [CrossRef]
- Reimann, D.; Chandra, K.; Vajragupta, N.; Glasmachers, T.; Junker, P.; Hartmaier, A. Modeling macroscopic material behavior with machine learning algorithms trained by micromechanical simulations. Front. Mater. 2019, 6, 181. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Sun, W.; Du, Q. A cooperative game for automated learning of elasto-plasticity knowledge graphs and models with AI-guided experimentation. Comput. Mech. 2019, 64, 467–499. [Google Scholar] [CrossRef] [Green Version]
- Stoffel, M.; Bamer, F.; Markert, B. Neural network based constitutive modeling of nonlinear viscoplastic structural response. Mech. Res. Commun. 2019, 95, 85–88. [Google Scholar] [CrossRef]
- Kopal, I.; Labaj, I.; Harničárová, M.; Valíček, J.; Hrubỳ, D. Prediction of the tensile response of carbon black filled rubber blends by artificial neural network. Polymers 2018, 10, 644. [Google Scholar] [CrossRef] [Green Version]
- Zopf, C.; Kaliske, M. Numerical characterisation of uncured elastomers by a neural network based approach. Comput. Struct. 2017, 182, 504–525. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G.E. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. J. Comput. Phys. 2019, 378, 686–707. [Google Scholar] [CrossRef]
- Haghighat, E.; Raissi, M.; Moure, A.; Gomez, H.; Juanes, R. A deep learning framework for solution and discovery in solid mechanics: Linear elasticity. arXiv 2020, arXiv:2003.02751. [Google Scholar]
- Xu, K.; Tartakovsky, A.M.; Burghardt, J.; Darve, E. Inverse Modeling of Viscoelasticity Materials using Physics Constrained Learning. arXiv 2020, arXiv:2005.04384. [Google Scholar]
- Ghaderi, A.; Morovati, V.; Dargazany, R. A Bayesian Surrogate Constitutive Model to Estimate Failure Probability of Rubber-Like Materials. arXiv 2020, arXiv:2010.13241. [Google Scholar]
- Tooranjipour, P.; Vatankhah, R.; Arefi, M.M. Prescribed performance adaptive fuzzy dynamic surface control of nonaffine time-varying delayed systems with unknown control directions and dead-zone input. Int. J. Adapt. Control Signal Proc. 2019, 33, 1134–1156. [Google Scholar] [CrossRef]
- Jung, S.; Ghaboussi, J. Neural network constitutive model for rate-dependent materials. Comput. Struct. 2006, 84, 955–963. [Google Scholar] [CrossRef]
- Mullins, L. Softening of rubber by deformation. Rubber Chem. Technol. 1969, 42, 339–362. [Google Scholar] [CrossRef]
- Bahrololoumi, A.; Morovati, V.; Poshtan, E.A.; Dargazany, R. A multi-physics constitutive model to predict quasi-static behaviour: Hydrolytic aging in thin cross-linked polymers. Int. J. Plast. 2020, 130, 102676. [Google Scholar] [CrossRef]
- Bueche, F. Molecular basis for the Mullins effect. J. Appl. Polym. Sci. 1960, 4, 107–114. [Google Scholar] [CrossRef]
- Hanson, D.E.; Hawley, M.; Houlton, R.; Chitanvis, K.; Rae, P.; Orler, E.B.; Wrobleski, D.A. Stress softening experiments in silica-filled polydimethylsiloxane provide insight into a mechanism for the Mullins effect. Polymer 2005, 46, 10989–10995. [Google Scholar] [CrossRef]
- Houwink, R. Slipping of molecules during the deformation of reinforced rubber. Rubber Chem. Technol. 1956, 29, 888–893. [Google Scholar] [CrossRef]
- Kraus, G.; Childers, C.; Rollmann, K. Stress softening in carbon black-reinforced vulcanizates. Strain rate and temperature effects. J. Appl. Polym. Sci. 1966, 10, 229–244. [Google Scholar] [CrossRef]
- Dalémat, M.; Coret, M.; Leygue, A.; Verron, E. Measuring stress field without constitutive equation. Mech. Mater. 2019, 136, 103087. [Google Scholar] [CrossRef] [Green Version]
- Truesdell, C. The Elements of Continuum Mechanics: Lectures given in August-September 1965 for the Department of Mechanical and Aerospace Engineering Syracuse University Syracuse, New York; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Holzapfel, G.A.; Gasser, T.C.; Ogden, R.W. A new constitutive framework for arterial wall mechanics and a comparative study of material models. J. Elast. the Phys. Sci. Solids 2000, 61, 1–48. [Google Scholar]
- Hartmann, S.; Neff, P. Polyconvexity of generalized polynomial-type hyperelastic strain energy functions for near-incompressibility. Int. J. Solids Struct. 2003, 40, 2767–2791. [Google Scholar] [CrossRef]
- Bažant, P.; Oh, B. Efficient numerical integration on the surface of a sphere. ZAMM-J. Appl. Math. Mech./ Z. für Angew. Math. Mech. 1986, 66, 37–49. [Google Scholar] [CrossRef]
- Dargazany, R.; Khiem, V.N.; Itskov, M. A generalized network decomposition model for the quasi-static inelastic behavior of filled elastomers. Int. J. Plast. 2014, 63, 94–109. [Google Scholar] [CrossRef]
- Lambert-Diani, J.; Rey, C. New phenomenological behavior laws for rubbers and thermoplastic elastomers. Eur. J. Mech. A/Solids 1999, 18, 1027–1043. [Google Scholar] [CrossRef]
- Mars, W.; Fatemi, A. Observations of the constitutive response and characterization of filled natural rubber under monotonic and cyclic multiaxial stress states. J. Eng. Mater. Technol. 2004, 126, 19–28. [Google Scholar] [CrossRef]
- Treloar, L.R.G. The Physics of Rubber Elasticity; Oxford University Press: Oxford, UK, 1975. [Google Scholar]
- Heuillet, P.; Dugautier, L. Mod é lization of the hyper é elastic behavior of rubbers and é lastom é thermoplastic, compact or cellular. Mech. Eng. Rubbers Thermoplast. Elastomers 1997. [Google Scholar]
- Mai, T.T.; Morishita, Y.; Urayama, K. Novel features of the Mullins effect in filled elastomers revealed by stretching measurements in various geometries. Soft Matter 2017, 13, 1966–1977. [Google Scholar] [CrossRef]
- Miehe, C.; Göktepe, S.; Lulei, F. A micro-macro approach to rubber-like materials—part I: The non-affine micro-sphere model of rubber elasticity. J. Mech. Phys. Solids 2004, 52, 2617–2660. [Google Scholar] [CrossRef]
- Khiêm, V.N.; Itskov, M. Analytical network-averaging of the tube model: Rubber elasticity. J. Mech. Phys. Solids 2016, 95, 254–269. [Google Scholar] [CrossRef]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef] [Green Version]
- Itskov, M.; Knyazeva, A. A rubber elasticity and softening model based on chain length statistics. Int. J. Solids Struct. 2016, 80, 512–519. [Google Scholar] [CrossRef]
- Zhong, D.; Xiang, Y.; Yin, T.; Yu, H.; Qu, S.; Yang, W. A physically-based damage model for soft elastomeric materials with anisotropic Mullins effect. Int. J. Solids Struct. 2019, 176, 121–134. [Google Scholar] [CrossRef]






| Training | Uni. 1 Tensile | Bi. 2 | Pure Shear | Uni. Comp. 3 | Plane Strain Comp. | |
|---|---|---|---|---|---|---|
| Prediction | ||||||
| Uni. Tensile | ||||||
| Bi. | ||||||
| Pure Shear | ||||||
| Uni. Comp. | ||||||
| Plane Strain Comp. | ||||||
| Model Type | AI | Phenomenological | Micro-Mechanical | |
|---|---|---|---|---|
| Proposed model | WYPiWYG model [23] | Non-affine micro-sphere model [60] | Network averaging tube model [61] | |
| Error (%) | 1.12 | 5.26 | 0.93 | 2.11 |
| Training Set | Uni-axial | Uni-axial | Uni-axial + Pure shear + Bi-axial | Uni-axial + Pure shear + Bi-axial |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghaderi, A.; Morovati, V.; Dargazany, R. A Physics-Informed Assembly of Feed-Forward Neural Network Engines to Predict Inelasticity in Cross-Linked Polymers. Polymers 2020, 12, 2628. https://doi.org/10.3390/polym12112628
Ghaderi A, Morovati V, Dargazany R. A Physics-Informed Assembly of Feed-Forward Neural Network Engines to Predict Inelasticity in Cross-Linked Polymers. Polymers. 2020; 12(11):2628. https://doi.org/10.3390/polym12112628
Chicago/Turabian StyleGhaderi, Aref, Vahid Morovati, and Roozbeh Dargazany. 2020. "A Physics-Informed Assembly of Feed-Forward Neural Network Engines to Predict Inelasticity in Cross-Linked Polymers" Polymers 12, no. 11: 2628. https://doi.org/10.3390/polym12112628