
Shape Memory Polymers as Smart Materials: A Review

 ,
, 
 ,
,  and
and
Abstract
:
1. Introduction
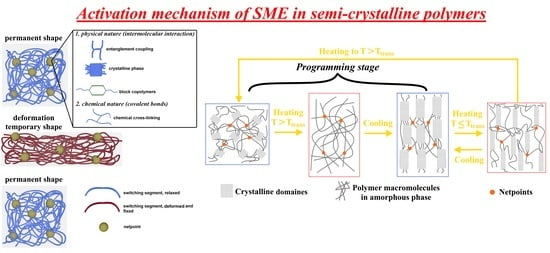
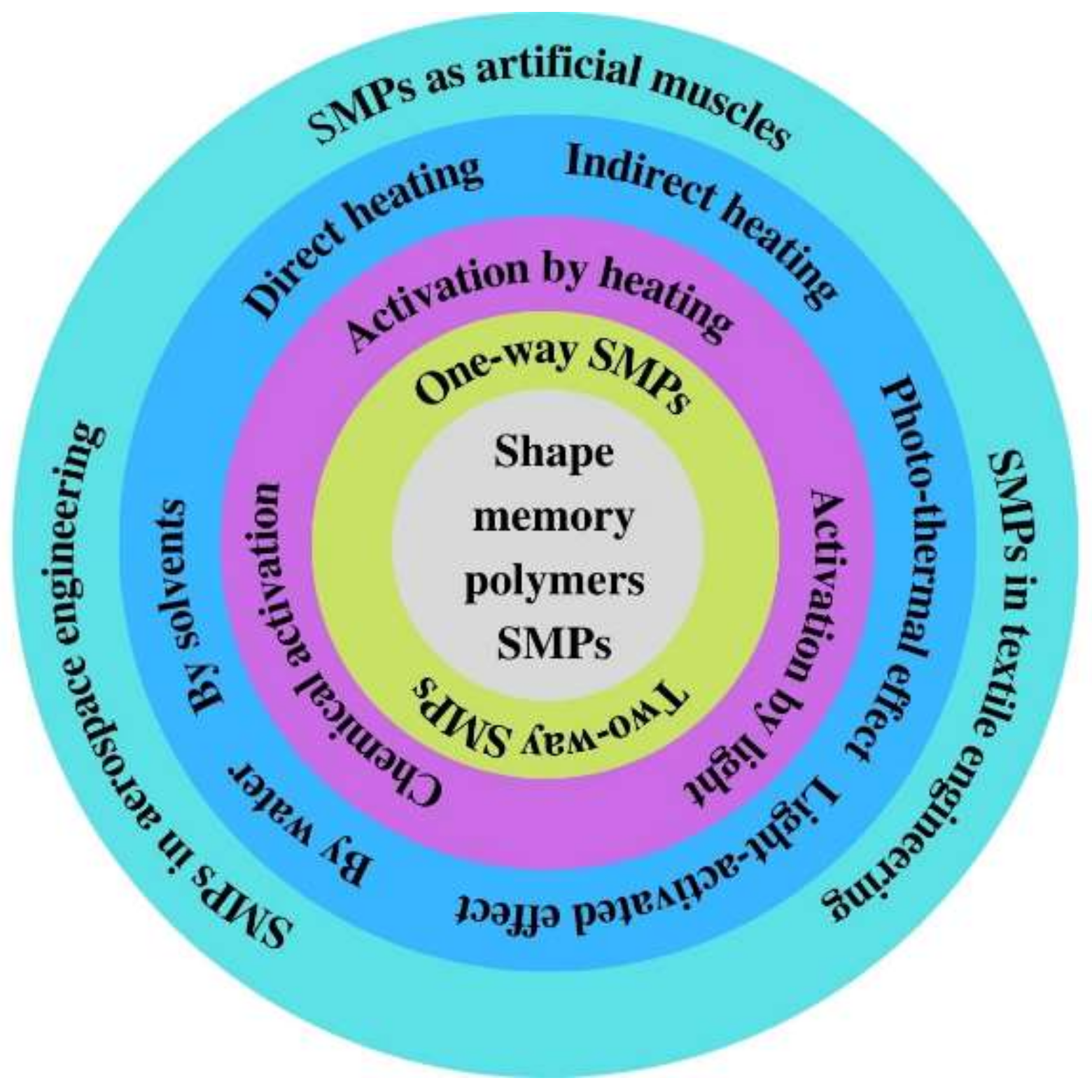
2. Activation Mechanisms of Shape Memory Polymers
2.1. Activation by Heating
2.1.1. SMP Activation by Direct Heating
2.1.2. SMPs Activation by Indirect Heating
2.2. Chemical Activation by Solvents
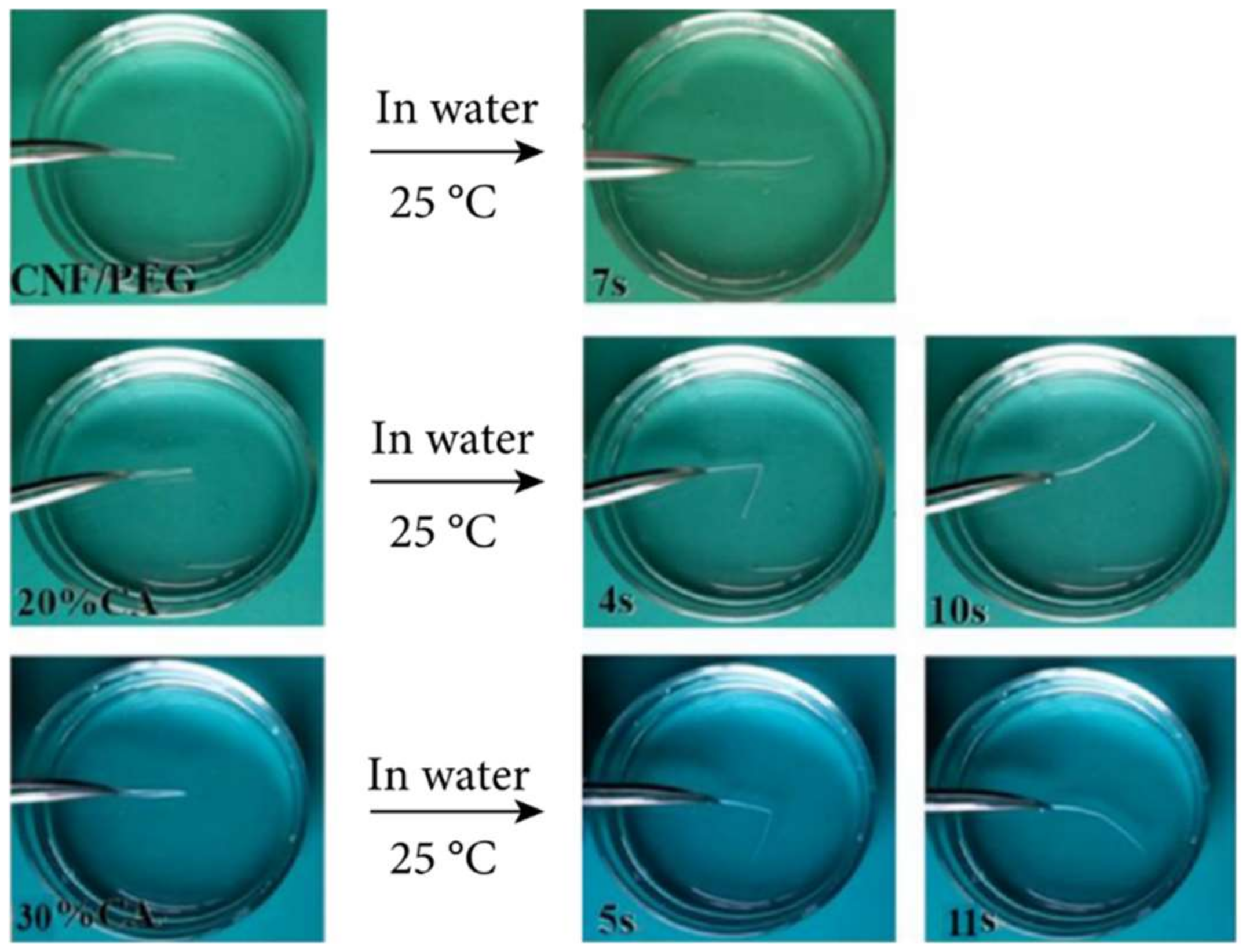
2.2.1. Chemical Activation by Water
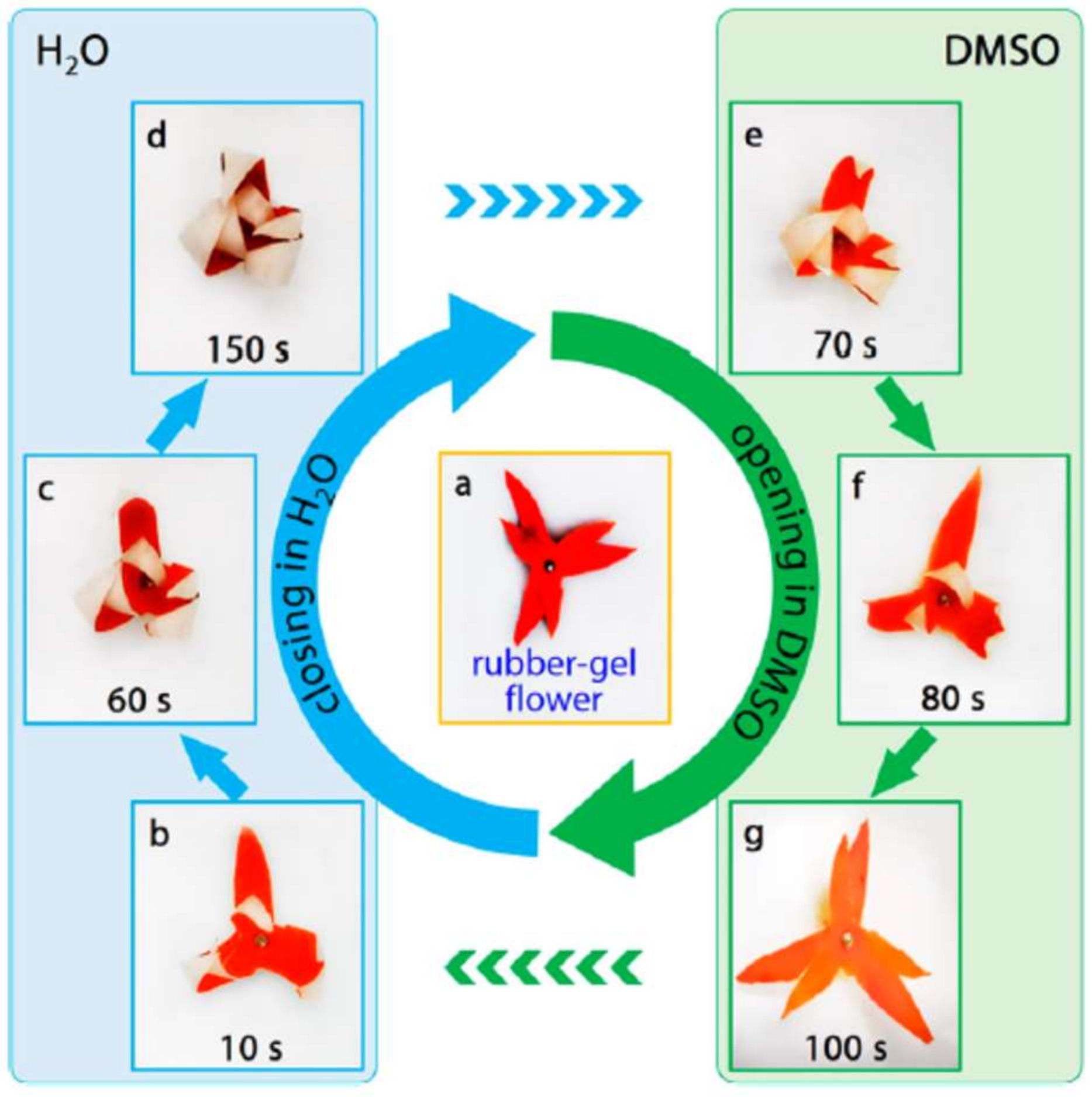
2.2.2. Chemical Activation by Solvents
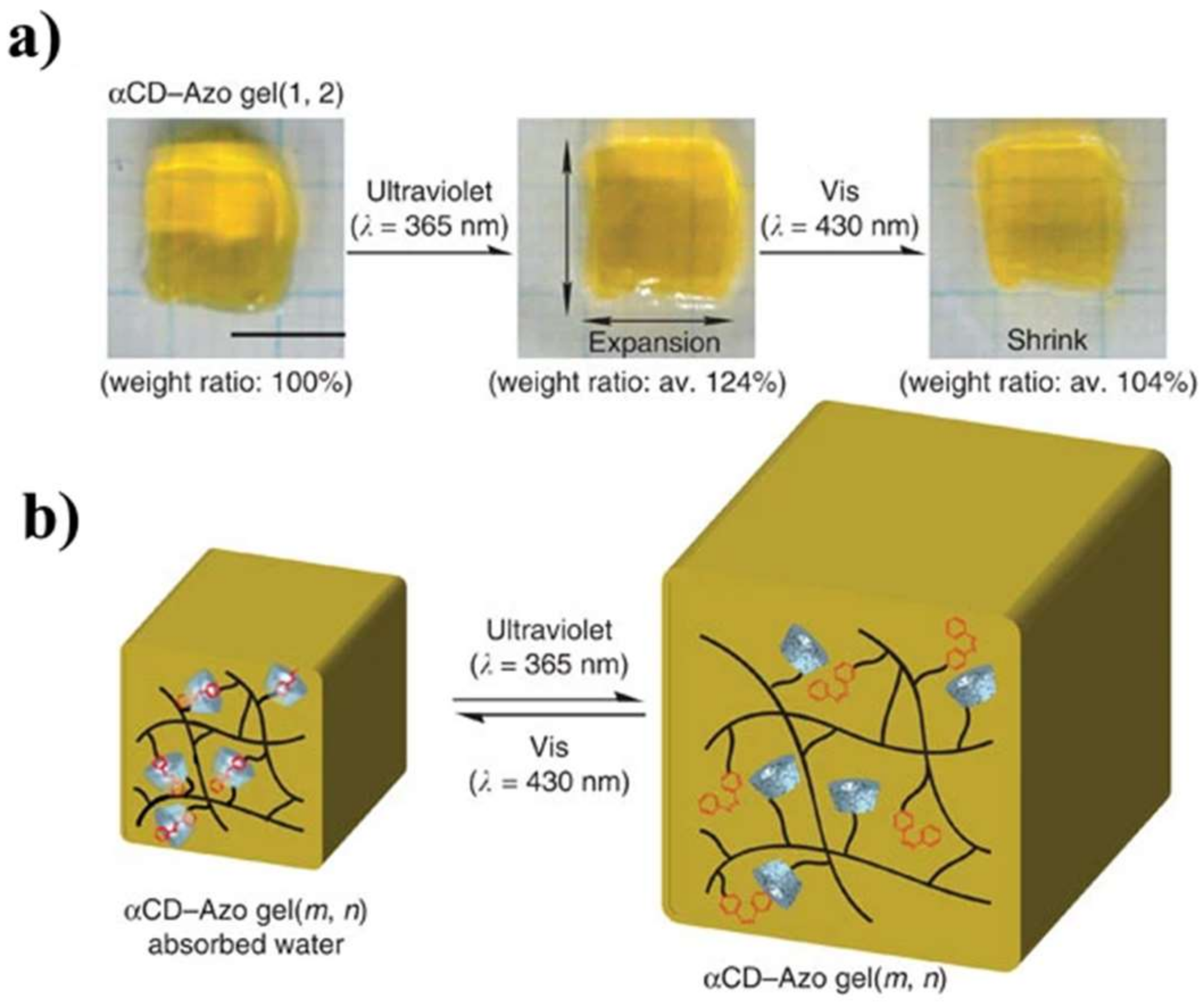
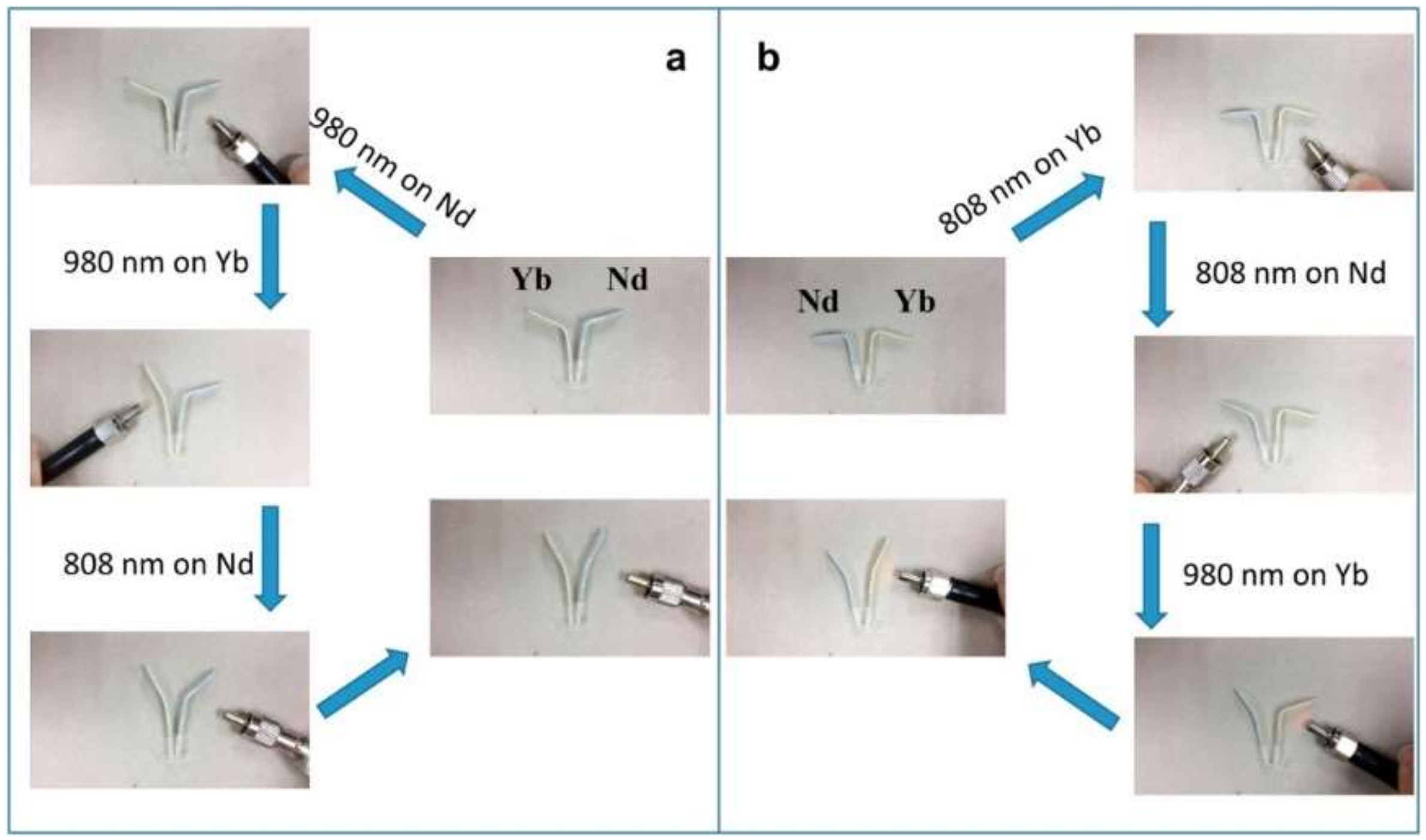
2.3. Activation by Light
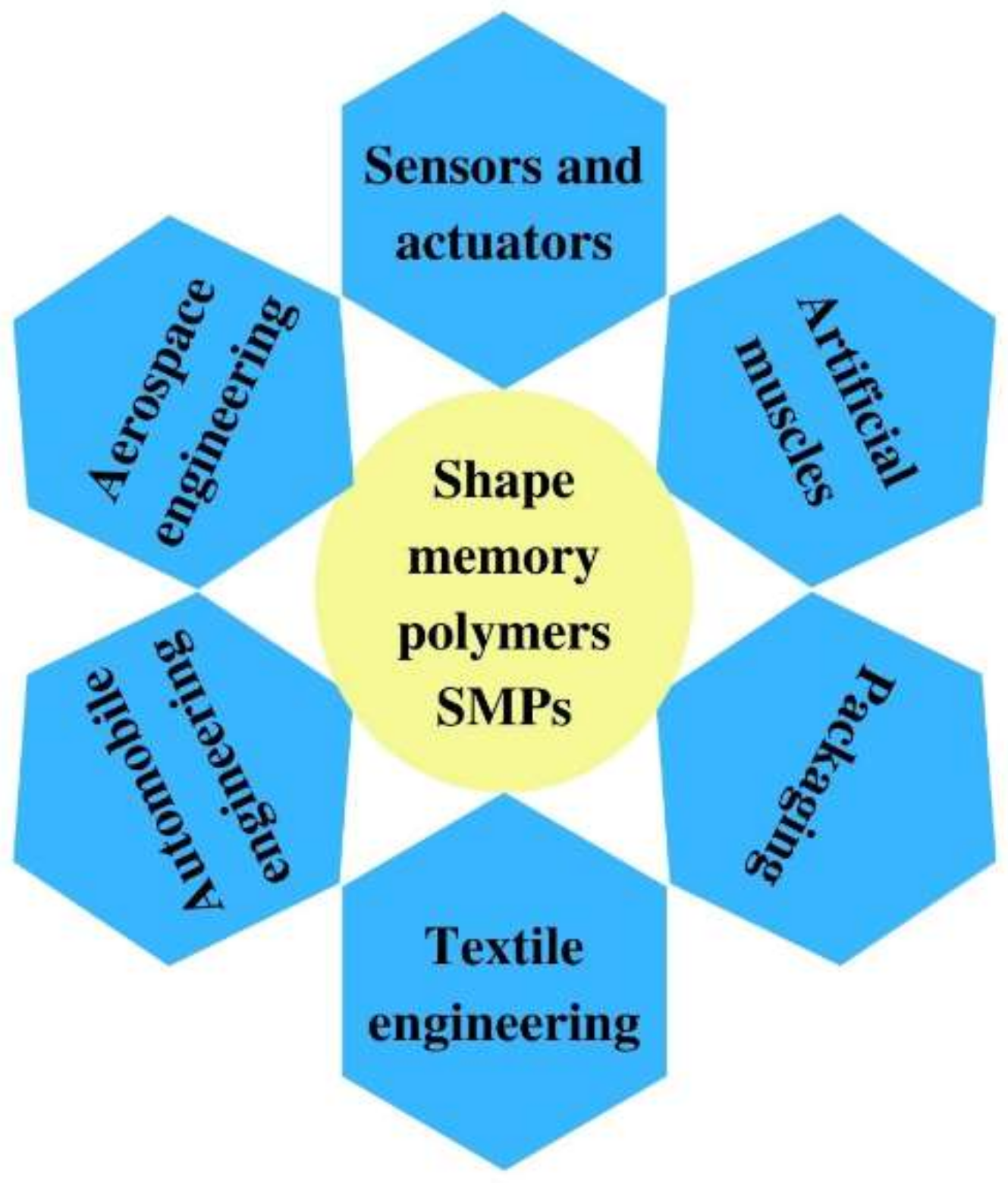
3. Applications of SMPs
3.1. SMPs as Artificial Muscles
3.2. SMPs in Aerospace Engineering
3.3. SMPs in Textile Engineering
4. Conclusion and Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Behl, M.; Lendlein, A. Shape-memory polymers. Mater. Today 2007, 10, 20–28. [Google Scholar] [CrossRef]
- Ratna, D.; Karger-Kocsis, J. Recent advances in shape memory polymers and composites: A review. J. Mater. Sci. 2008, 43, 254–269. [Google Scholar] [CrossRef]
- Orozco, F.; Kaveh, M.; Santosa, D.S.; Lima, G.M.R.; Gomes, D.R.; Pei, Y.; Araya-Hermosilla, R.; Moreno-Villoslada, I.; Picchioni, F.; Bose, R.K. Electroactive Self-Healing Shape Memory Polymer Composites Based on Diels–Alder Chemistry. ACS Appl. Polym. Mater. 2021, 3, 6147–6156. [Google Scholar] [CrossRef]
- Lewis, C.L.; Dell, E.M. A Review of Shape Memory Polymers Bearing Reversible Binding Groups. J. Polym. Sci. Part B Polym. Phys. 2016, 54, 1340–1364. [Google Scholar] [CrossRef]
- Wang, K.; Strandman, S.; Zhu, X.X. A mini review: Shape memory polymers for biomedical applications. Front. Chem. Sci. Eng. 2017, 11, 143–153. [Google Scholar] [CrossRef]
- Menon, A.V.; Madras, G.; Bose, S. The Journey of Self-Healing and Shape Memory Polyurethanes from Bench to Translational Research. Polym. Chem. 2019, 10, 4370–4388. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Prakoso, A.T.; Basri, H.; van der Heide, E. Computational Contact Pressure Prediction of CoCrMo, SS 316L and Ti6Al4V Femoral Head against UHMWPE Acetabular Cup under Gait Cycle. J. Funct. Biomater. 2022, 13, 64. [Google Scholar] [CrossRef] [PubMed]
- Maksimkin, A.V.; Dayyoub, T.; Telyshev, D.V.; Gerasimenko, A.Y. Electroactive Polymer-Based Composites for Artificial Muscle-like Actuators: A Review. Nanomaterials 2022, 12, 2272. [Google Scholar] [CrossRef] [PubMed]
- Lendlein, A.; Kelch, S. Shape-memory polymers. Angew. Chem. Int. Ed. 2002, 41, 2034–2057. [Google Scholar] [CrossRef]
- Liu, C.; Qin, H.; Mather, P.T. Review of progress in shape-memory polymers. J. Mater. Chem. 2007, 17, 1543–1558. [Google Scholar] [CrossRef]
- Everhart, M.C.; Nickerson, D.M.; Hreha, R.D. High-temperature reusable shape memory polymer mandrels. In Smart Structures and Materials 2006: Industrial and Commercial Applications of Smart Structures Technologies; White, E.V., Ed.; SPIE: San Diego, CA, USA, 2006; Volume 6171. [Google Scholar] [CrossRef]
- Lendlein, A.; Jiang, H.Y.; Junger, O.; Langer, R. Light-induced shape-memory polymers. Nature 2005, 434, 879–882. [Google Scholar] [CrossRef]
- Jiang, H.y.; Kelch, S.; Lendlein, A. Polymers move in response to light. Adv. Mater. 2006, 18, 1471–1476. [Google Scholar] [CrossRef]
- Paik, I.H.; Goo, N.S.; Jung, Y.C.; Cho, J.W. Development and application of conducting shape memory polyurethane actuators. Smart Mater. Struct. 2006, 15, 1476–1482. [Google Scholar] [CrossRef]
- Leng, J.S.; Lv, H.B.; Liu, Y.J.; Du, S.Y. Electroactivate shape-memory polymer filled with nanocarbon particles and short carbon fibers. Appl. Phys. Lett. 2007, 1, 144105. [Google Scholar] [CrossRef]
- Schmidt, A.M. Electromagnetic activation of shape memory polymer networks containing magnetic nanoparticles. Macromol. Rapid Commun. 2006, 27, 1168–1172. [Google Scholar] [CrossRef]
- Koerner, H.; Price, G.; Pearce, N.; Alexander, M.; Vaia, R.A. Remotely actuated polymer nanocomposites-stress-recovery of carbon-nanotube-filled thermoplastic elastomers. Nat. Mater. 2004, 3, 115–120. [Google Scholar] [CrossRef]
- Buckley, P.R.; Mckinley, G.H.; Wilson, T.S.; Small, W.; Benett, W.J.; Bearinger, J.P.; Mcelfresh, M.W.; Maitland, D.J. Inductively heated shape memory polymer for the magnetic actuation of medical devices. IEEE Trans. Biomed. Eng. 2006, 53, 2075–2083. [Google Scholar] [CrossRef]
- Leng, J.S.; Lan, X.; Liu, Y.J.; Du, S.Y.; Huang, W.M.; Liu, N.; Phee, S.J.; Yuan, Q. Electrical conductivity of thermoresponsive shape-memory polymer with embedded micron sized Ni powder chains. Appl. Phys. Lett. 2008, 92, 014104. [Google Scholar] [CrossRef]
- Tan, R.Y.H.; Lee, C.S.; Pichika, M.R.; Cheng, S.F.; Lam, K.Y. PH Responsive Polyurethane for the Advancement of Biomedical and Drug Delivery. Polymers 2022, 14, 1672. [Google Scholar] [CrossRef]
- Li, J.; Hu, W.; Zhang, Y.; Tan, H.; Yan, X.; Zhao, L.; Liang, H. pH and glucose dually responsive injectable hydrogel prepared by in situ crosslinking of phenylboronic modified chitosan and oxidized dextran. J. Polym. Sci. Part A Polym. Chem. 2015, 53, 1235–1244. [Google Scholar] [CrossRef]
- Agarwal, S.; Jiang, S.; Chen, Y. Progress in the Field of Water- and/or Temperature-Triggered Polymer Actuators. Macromol. Mater. Eng. 2018, 304, 1800548. [Google Scholar] [CrossRef]
- Mendez, J.; Annamalai, P.K.; Eichhorn, S.J.; Rusli, R.; Rowan, S.J.; Foster, E.J.; Weder, C. Bioinspired mechanically adaptive polymer nanocomposites with water-activated shape-memory effect. Macromolecules 2011, 44, 6827–6835. [Google Scholar] [CrossRef]
- Wu, M.; Sukyai, P.; Lv, D.; Zhang, F.; Wang, P.; Liu, C.; Li, B. Water and humidity-induced shape memory cellulose nanopaper with quick response, excellent wet strength and folding resistance. Chem. Eng. J. 2020, 392, 123673. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, C.; Rehman, H.U.; Zheng, X.; Li, H.; Liu, H.; Hedenqvist, M.S. Shape-Memory Polymeric Artificial Muscles: Mechanisms, Applications and Challenges. Molecules 2020, 25, 4246. [Google Scholar] [CrossRef] [PubMed]
- Chung, T.; Romo-Uribe, A.; Mather, P.T. Two-Way Reversible Shape Memory in a Semicrystalline Network. Macromolecules 2008, 41, 184–192. [Google Scholar] [CrossRef]
- Sangroniz, L.; Cavallo, D.; Muller, A.J. Self-Nucleation Effects on Polymer Crystallization. Macromolecules 2020, 53, 4581–4604. [Google Scholar] [CrossRef]
- Zare, M.; Prabhakaran, M.P.; Parvin, N.; Ramakrishna, S. Thermally-induced Two-way Shape Memory Polymers: Mechanisms, Structures, and Applications. Chem. Eng. J. 2019, 374, 706–720. [Google Scholar] [CrossRef]
- Li, F.; Liu, Y.; Leng, J. Progress of shape memory polymers and their composites in aerospace applications. Smart Mater. Struct. 2019, 28, 103003. [Google Scholar] [CrossRef]
- Liu, Y.; Du, H.; Liu, L.; Leng, J. Shape memory polymers and their composites in aerospace applications: A review. Smart Mater. Struct. 2014, 23, 023001. [Google Scholar] [CrossRef]
- Lan, X.; Liu, Y.; Lv, H.; Wang, X.; Leng, J.; Du, S. Fiber reinforced shape-memory polymer composite and its application in a deployable hinge. Smart Mater. Struct. 2009, 18, 024002. [Google Scholar] [CrossRef]
- Li, F.; Liu, L.; Lan, X.; Zhou, X.; Bian, W.; Liu, Y.; Leng, J. Preliminary design and analysis of a cubic deployable support structure based on shape memory polymer composite. Int. J. Smart Nano Mater. 2016, 7, 106–118. [Google Scholar] [CrossRef]
- Chen, L.; Wei, X.; Wang, F.; Jian, S.; Yang, W.; Ma, C.; Duan, G.; Jiang, S. In-situ polymerization for mechanical strong composite actuators based on anisotropic wood and thermoresponsive polymer. Chin. Chem. Lett. 2022, 33, 2635–2638. [Google Scholar] [CrossRef]
- Wei, X.; Chen, L.; Wang, Y.; Sun, Y.; Ma, C.; Yang, X.; Jiang, S.; Duan, G. An Electrospinning Anisotropic Hydrogel with Remotely-Controlled Photo-Responsive Deformation and Long-Range Navigation for Synergist Actuation. Chem. Eng. J. 2022, 433, 134258. [Google Scholar] [CrossRef]
- Peng, S.; Sun, Y.; Ma, C.; Duan, G.; Liu, Z.; Ma, C. Recent advances in dynamic covalent bond-based shape memory polymers. e-Polymers 2022, 22, 285–300. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, F.; Chen, L.; Wei, X.; Xue, M.; Yang, F.; Jiang, S. 3D printing hydrogels for actuators: A review. Chin. Chem. Lett. 2021, 32, 2923–2932. [Google Scholar] [CrossRef]
- Thakur, S. Shape Memory Polymers for Smart Textile Applications, in Textiles for Advanced Applications. London, United Kingdom: IntechOpen, 2017 [Online]. Available online: https://www.intechopen.com/chapters/56078 (accessed on 1 August 2022).
- Cho, G.; Lee, S.; Cho, J. Review and reappraisal of smart clothing. Int. J. Hum. -Comput. Interact. 2009, 25, 582–617. [Google Scholar] [CrossRef]
- Gu, J.F.; Gorgutsa, S.; Skorobogatiy, M. Soft capacitor fibers using conductive polymers for electronic textiles. Smart Mater. Struct. 2010, 19, 115006. [Google Scholar] [CrossRef]
- Zheng, N.G.; Wu, Z.H.; Lin, M. Infrastructure and reliability analysis of electric networks for E-textiles. IEEE Trans. Syst. Man Cybern.-Part C Appl. Rev. 2010, 40, 36–51. [Google Scholar] [CrossRef]
- Liu, L.; Xu, W.; Ding, Y.; Agarwal, S.; Greiner, A.; Duan, G. A review of smart electrospun fibers toward textiles. Compos. Commun. 2020, 22, 100506. [Google Scholar] [CrossRef]
- Maksimkin, A.V.; Larin, I.I.; Chukov, D.I.; Zadorozhnyy, M.Y.; Dayyoub, T.; Zadorozhnyy, V.Y.; Spieckermann, F.; Soprunyuk, V. Coiled artificial muscles based on UHMWPE with large muscle stroke. Mater. Today Commun. 2019, 21, 100688. [Google Scholar] [CrossRef]
- Sarikaya, S.; Gardea, F.; Auletta, J.T.; Kavosi, J.; Langrock, A.; Mackie, D.M.; Naraghi, M. Athermal artificial muscles with drastically improved work capacity from pH-Responsive coiled polymer fibers. Sens. Actuators B Chem. 2021, 335, 129703. [Google Scholar] [CrossRef]
- Chaudhary, V.; Punia Bangar, S.; Thakur, N.; Trif, M. Recent Advancements in Smart Biogenic Packaging: Reshaping the Future of the Food Packaging Industry. Polymers 2022, 14, 829. [Google Scholar] [CrossRef]
- Herniou--Julien, C.; Tomy, J.; Gutiérrez, T.J. Reactive Extrusion-Processed Shape-Memory Food Packaging Films Made from Native and Carboxymethylated Plantain Flour/Polystyrene Blends. Starch-Stärke 2021, 73, 2100053. [Google Scholar] [CrossRef]
- Yazik, M.H.M.; Sultan, M.T.H. Shape memory polymer and its composites as morphing materials. In Failure Analysis in Biocomposites, Fibre-Reinforced Composites and Hybrid Composites, 1st ed.; Jawaid, M., Mohamed Thariq, M., Saba, N., Eds.; Woodhead Publishing: Amsterdam, The Netherlands, 2019; pp. 181–198. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A Review of Shape Memory Alloy Research, Applications and Opportunities. Mater. Des. 2013, 56, 1078–1113. [Google Scholar] [CrossRef]
- Huang, W.M.; Yang, B.; Fu, Y.Q. Polyurethane Shape Memory Polymers, 1st ed.; CRC Press: Boca Raton, FL, USA, 2011; pp. 1–383. [Google Scholar] [CrossRef]
- Feng, Y.K.; Behl, M.; Kelch, S.; Lendlein, A. Biodegradable multiblock copolymers based on oligodepsipeptides with shape-memory properties. Macromol. Biosci. 2009, 9, 45–54. [Google Scholar] [CrossRef]
- Lendlein, A.; Zotzmann, J.; Feng, Y.K.; Alteheld, A.; Kelch, S. Controlling the switching temperature of biodegradable, amorphous, shape-memory poly(rac-lactide)urethane networks by incorporation of different comonomers. Biomacromolecules 2009, 10, 975–982. [Google Scholar] [CrossRef]
- Shanmuganathan, K.; Capadona, J.R.; Rowan, S.J.; Weder, C. Stimuli-responsive mechanically adaptive polymer nanocomposites. ACS Appl. Mater. Interface 2010, 2, 165–174. [Google Scholar] [CrossRef] [Green Version]
- Cao, L.; Wang, L.; Zhou, C.; Hu, X.; Fang, L.; Ni, Y.; Fang, L.; Ni, Y.; Lu, C.; Xu, Z. Surface Structures, Particles, and Fibers of Shape-Memory Polymers at Micro-/Nanoscale. Adv. Polym. Technol. 2020, 2020, 7639724. [Google Scholar] [CrossRef]
- Yang, Q.; Zheng, W.; Zhao, W.; Peng, C.; Ren, J.; Yu, Q.; Hu, Y.; Zhang, X. One-way and two-way shape memory effects of a high-strain cis-1,4 polybutadiene-polyethylene copolymer based dynamic network via self-complementary quadruple hydrogen bonding. Polym. Chem. 2019, 10, 718–726. [Google Scholar] [CrossRef]
- Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A. Reversible Bidirectional Shape-Memory Polymers. Adv. Mater. 2013, 25, 4466–4469. [Google Scholar] [CrossRef]
- Purwar, R.; Sachan, R. Thermoresponsive shape memory polymers for smart textiles. In Advances in Functional and Protective Textiles; ul-Islam, S., Butola, B.S., Eds.; Woodhead Publishing: Amsterdam, The Netherlands, 2020; pp. 37–62. [Google Scholar] [CrossRef]
- Behl, M.; Kratz, K.; Noechel, U.; Sauter, T.; Lendlein, A. Temperature-memory polymer actuators. Proc. Natl. Acad. Sci. USA 2013, 110, 12555–12559. [Google Scholar] [CrossRef] [PubMed]
- Pandini, S.; Baldi, F.; Paderni, K.; Messori, M.; Toselli, M.; Pilati, F.; Gianoncelli, A.; Brisotto, M.; Bontempi, E.; Riccò, T. One-way and two-way shape memory behaviour of semi-crystalline networks based on sol–gel cross-linked poly(ε-caprolactone). Polymer 2013, 54, 4253–4265. [Google Scholar] [CrossRef]
- Urbanski, M.; Reyes, C.G.; Noh, J.; Sharma, A.; Geng, Y.; Subba Rao Jampani, V.; Lagerwall, J.P.F. Liquid crystals in micron-scale droplets, shells and fibers. J. Phys. Condens. Matter 2017, 29, 133003. [Google Scholar] [CrossRef] [PubMed]
- Xie, P.; Zhang, R. Liquid crystal elastomers, networks and gels: Advanced smart materials. J. Mater. Chem. 2005, 15, 2529. [Google Scholar] [CrossRef]
- Xu, M.; Cong, Y.; Zhang, B. Synthesis and characterisation of biodegradable liquid crystal elastomer with the property of shape recovery. Liq. Cryst. 2017, 44, 1701–1708. [Google Scholar] [CrossRef]
- Belmonte, A.; Lama, G.C.; Gentile, G.; Fernández-Francos, X.; De la Flor, S.; Cerruti, P.; Ambrogi, V. Synthesis and Characterization of Liquid-Crystalline Networks: Toward Autonomous Shape-Memory Actuation. J. Phys. Chem. C 2017, 121, 22403–22414. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Zhuo, H.; Zhu, Y. Two-way shape memory effect in polymer laminates. Mater. Lett. 2008, 62, 4088–4090. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Zhuo, H. Properties and mechanism of two-way shape memory polyurethane composites. Compos. Sci. Technol. 2010, 70, 1437–1443. [Google Scholar] [CrossRef]
- Kang, T.-H.; Lee, J.-M.; Yu, W.-R.; Youk, J.H.; Ryu, H.W. Two-way actuation behavior of shape memory polymer/elastomer core/shell composites. Smart Mater. Struct. 2012, 21, 035028. [Google Scholar] [CrossRef]
- Wu, Y.; Hu, J.; Han, J.; Zhu, Y.; Huang, H.; Li, J.; Tang, B. Two-way shape memory polymer with “switch–spring” composition by interpenetrating polymer network. J. Mater. Chem. A 2014, 2, 18816–18822. [Google Scholar] [CrossRef]
- Ratna, D.; Karger-Kocsis, J. Shape memory polymer system of semi-interpenetrating network structure composed of crosslinked poly (methyl methacrylate) and poly (ethylene oxide). Polymer 2011, 52, 1063–1070. [Google Scholar] [CrossRef]
- Lu, C.; Liu, Y.; Liu, X.; Wang, C.; Wang, J.; Chu, F. Sustainable Multiple- and Multistimulus-Shape-Memory and Self-Healing Elastomers with Semi-interpenetrating Network Derived from Biomass via Bulk Radical Polymerization. ACS Sustain. Chem. Eng. 2018, 6, 6527–6535. [Google Scholar] [CrossRef]
- Woodard, L.N.; Page, V.M.; Kmetz, K.T.; Grunlan, M.A. PCL-PLLA Semi-IPN Shape Memory Polymers (SMPs): Degradation and Mechanical Properties. Macromol. Rapid Commun. 2016, 37, 1972–1977. [Google Scholar] [CrossRef]
- Hornat, C.C.; Urban, M.W. Shape Memory Effects in Self-Healing Polymers. Prog. Polym. Sci. 2020, 102, 101208. [Google Scholar] [CrossRef]
- Hanzon, D.W.; Yu, K.; Yakacki, C.M. Activation Mechanisms of Shape-Memory Polymers. In Shape-Memory Polymer Device Design, 1st ed.; Safranski, D., Griffis, J.C., Eds.; William Andrew: Amsterdam, The Netherlands, 2017; pp. 139–187. [Google Scholar] [CrossRef]
- Robertson, J.M.; Birjandi Nejad, H.; Mather, P.T. Dual-Spun Shape Memory Elastomeric Composites. ACS Macro Lett. 2015, 4, 436–440. [Google Scholar] [CrossRef]
- Behl, M.; Razzaq, M.Y.; Lendlein, A. Multifunctional Shape-Memory Polymers. Adv. Mater. 2010, 22, 3388–3410. [Google Scholar] [CrossRef]
- Mather, P.T.; Luo, X.; Rousseau, I.A. Shape Memory Polymer Research. Annu. Rev. Mater. Res. 2009, 39, 445–471. [Google Scholar] [CrossRef]
- Qi, H.J.; Nguyen, T.D.; Castro, F.; Yakacki, C.M.; Shandas, R. Finite deformation thermo-mechanical behavior of thermally induced shape memory polymers. J. Mech. Phys. Solids 2008, 56, 1730–1751. [Google Scholar] [CrossRef]
- Flory, P.J. Principles of Polymer Chemistry; Cornell University Press: Ithaca, NY, USA, 1953; pp. 432–494. ISBN 0801401348/9780801401343. [Google Scholar]
- Luo, X.; Mather, P.T. Conductive shape memory nanocomposites for high speed electrical actuation. Soft Matter 2010, 6, 2146. [Google Scholar] [CrossRef]
- Das, N.C.; Chaki, T.K.; Khastgir, D. Effect of filler treatment and crosslinking on mechanical and dynamic mechanical properties and electrical conductivity of carbon black-filled ethylene-vinyl acetate copolymer composites. J. Appl. Polym. Sci. 2003, 90, 2073–2082. [Google Scholar] [CrossRef]
- Oliver, K.; Seddon, A.; Trask, R.S. Morphing in nature and beyond: A review of natural and synthetic shape-changing materials and mechanisms. J. Mater. Sci. 2016, 51, 10663–10689. [Google Scholar] [CrossRef]
- Kim, J.; Jeong, H.J.; Park, H.-C.; Jeong, H.; Bae, S.; Kim, B.K. Electroactive shape memory performance of polyurethane/graphene nanocomposites. React. Funct. Polym. 2015, 88, 1–7. [Google Scholar] [CrossRef]
- Luyt, A.; Molefi, J.; Krump, H. Thermal, mechanical and electrical properties of copper powder filled low-density and linear low-density polyethylene composites. Polym. Degrad. Stab. 2006, 91, 1629–1636. [Google Scholar] [CrossRef]
- Steurer, P.; Wissert, R.; Thomann, R.; Mülhaupt, R. Functionalized Graphenes and Thermoplastic Nanocomposites Based upon Expanded Graphite Oxide. Macromol. Rapid Commun. 2009, 30, 316–327. [Google Scholar] [CrossRef]
- Khan, A.; Khan, A.A.P.; Asiri, A.M.; Alamry, K.A. Preparation and Characterization of Hybrid Graphene Oxide Composite and Its Application in Paracetamol Microbiosensor. Polym. Compos. 2015, 36, 221–228. [Google Scholar] [CrossRef]
- Mohan, R.; Subha, J.; Alam, J. Influence of Multiwalled Carbon Nanotubes on Biodegradable Poly(lactic acid) Nanocomposites for Electroactive Shape Memory Actuator. Adv. Polym. Technol. 2016, 37, 256–261. [Google Scholar] [CrossRef]
- Sun, Y.C.; Leaker, B.D.; Lee, J.E.; Ryan Nam, R.; Naguib, H.E. Shape programming of polymeric based electrothermal actuator (ETA) via artificially induced stress relaxation. Sci. Rep. 2019, 9, 11445. [Google Scholar] [CrossRef]
- Al-Rubaiai, M.; Pinto, T.; Qian, C.; Tan, X. Soft Actuators with Stiffness and Shape Modulation Using 3D-Printed Conductive Polylactic Acid Material. Soft Robot 2019, 6, 318–332. [Google Scholar] [CrossRef]
- Xu, Z.; Ding, C.; Wei, D.-W.; Bao, R.-Y.; Ke, K.; Liu, Z.; Yang, M.-B.; Yang, W. Electro and Light-Active Actuators Based on Reversible Shape-Memory Polymer Composites with Segregated Conductive Networks. ACS Appl. Mater. Interfaces 2019, 11, 30332–30340. [Google Scholar] [CrossRef]
- Jung, Y.C.; Yoo, H.J.; Kim, Y.A.; Cho, J.W.; Endo, M. Electroactive shape memory performance of polyurethane composite having homogeneously dispersed and covalently crosslinked carbon nanotubes. Carbon 2010, 48, 1598–1603. [Google Scholar] [CrossRef]
- Ashley, S. Artificial Muscles. Sci. Am. 2003, 289, 52–59. [Google Scholar] [CrossRef] [PubMed]
- Biddiss, E.; Chau, T. Electroactive polymeric sensors in hand prostheses: Bending response of an ionic polymer metal composite. Med. Eng. Phys. 2006, 28, 568–578. [Google Scholar] [CrossRef] [PubMed]
- Cai, Y.; Jiang, J.-S.; Zheng, B.; Xie, M.-R. Synthesis and properties of magnetic sensitive shape memory Fe3O4/poly(ε-caprolactone)-polyurethane nanocomposites. J. Appl. Polym. Sci. 2012, 127, 49–56. [Google Scholar] [CrossRef]
- Liu, C.; Huang, J.; Yuan, D.; Chen, Y. Design of high strength XSBR/Fe3O4/ZDMA shape memory composite with dual responses. Ind. Eng. Chem. Res. 2018, 57, 14527–14534. [Google Scholar] [CrossRef]
- Basak, S.; Bandyopadhyay, A. Solvent Responsive Shape Memory Polymers- Evolution, Current Status, and Future Outlook. Macromol. Chem. Phys. 2021, 222, 2100195. [Google Scholar] [CrossRef]
- Neuser, S.; Michaud, V.; White, S.R. Improving solvent-based self-healing materials through shape memory alloys. Polymer 2012, 53, 370–378. [Google Scholar] [CrossRef]
- Xiao, R.; Nguyen, T.D. Modeling the solvent-induced shape-memory behavior of glassy polymers. Soft Matter 2013, 9, 9455. [Google Scholar] [CrossRef]
- Xiao, R.; Huang, W.M. Heating/Solvent Responsive Shape-Memory Polymers for Implant Biomedical Devices in Minimally Invasive Surgery: Current Status and Challenge. Macromol. Biosci. 2020, 20, 2000108. [Google Scholar] [CrossRef]
- Meng, H.; Li, G. A review of stimuli-responsive shape memory polymer composites. Polymer 2013, 54, 2199–2221. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Tao, G.; Wang, L.; Zhou, S. Thermo- and water-induced shape memory poly(vinyl alcohol) supramolecular networks crosslinked by self-complementary quadruple hydrogen bonding. Polym. Chem. 2016, 7, 6637–6644. [Google Scholar] [CrossRef]
- Wang, C.; Wang, H.; Zou, F.; Chen, S.; Wang, Y. Development of Polyhydroxyalkanoate-Based Polyurethane with Water-Thermal Response Shape-Memory Behavior as New 3D Elastomers Scaffolds. Polymers 2019, 11, 1030. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Y.; Song, L.; Ren, L.; Xu, X.; Lu, S. Swelling Resistance and Water-Induced Shape Memory Performances of Sisal Cellulose Nanofibers/Polyethylene Glycol/Citric Acid Nanocellulose Papers. J. Nanomater. 2019, 2019, 4304532. [Google Scholar] [CrossRef]
- Liao, J.; Huang, J.; Yang, S.; Wang, X.; Wang, T.; Sun, W.; Tong, Z. Ultra-Strong and Fast Response Gel by Solvent Exchange and Its Shape Memory Applications. ACS Appl. Polym. Mater. 2019, 1, 2703–2712. [Google Scholar] [CrossRef]
- Herath, H.M.C.M.; Epaarachchi, J.A.; Islam, M.M.; Al-Azzawi, W.; Leng, J.; Zhang, F. Structural performance and photothermal recovery of carbon fibre reinforced shape memory polymer. Compos. Sci. Technol. 2018, 167, 206–214. [Google Scholar] [CrossRef]
- Small IV, W.; Wilson, T.S.; Benett, W.J.; Loge, J.M.; Maitland, D.J. Laser-activated shape memory polymer intravascular thrombectomy device. Opt. Express 2005, 13, 8204. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, G.; Liu, W.; Liu, H.; Huo, Y.; Ren, T.; Hou, X. An investigation on laser-triggered shape memory behaviors of hydro-epoxy/carbon black composites. Smart Mater. Struct. 2018, 27, 095008. [Google Scholar] [CrossRef]
- Fang, L.; Chen, S.; Fang, T.; Fang, J.; Lu, C.; Xu, Z. Shape-memory polymer composites selectively triggered by near-infrared light of two certain wavelengths and their applications at macro-/microscale. Compos. Sci. Technol. 2017, 138, 106–116. [Google Scholar] [CrossRef]
- Small, W.; Buckley, P.R.; Wilson, T.S.; Benett, W.J.; Hartman, J.; Saloner, D.; Maitland, D.J. Shape Memory Polymer Stent With Expandable Foam: A New Concept for Endovascular Embolization of Fusiform Aneurysms. IEEE Trans. Biomed. Eng. 2007, 54, 1157–1160. [Google Scholar] [CrossRef]
- Fang, L.; Fang, T.; Liu, X.; Chen, S.; Lu, C.; Xu, Z. Near-Infrared Light Triggered Soft Actuators in Aqueous Media Prepared from Shape-Memory Polymer Composites. Macromol. Mater. Eng. 2016, 301, 1111–1120. [Google Scholar] [CrossRef]
- Iqbal, D.; Samiullah, M.H. Photo-Responsive Shape-Memory and Shape-Changing Liquid-Crystal Polymer Networks. Materials 2013, 6, 116–142. [Google Scholar] [CrossRef]
- Takashima, Y.; Hatanaka, S.; Otsubo, M.; Nakahata, M.; Kakuta, T.; Hashidzume, A.; Yamaguchi, H.; Harada, A. Expansion–contraction of photoresponsive artificial muscle regulated by host–guest interactions. Nat. Commun. 2012, 3, 1270. [Google Scholar] [CrossRef] [PubMed]
- Shou, Q.; Uto, K.; Iwanaga, M.; Ebara, M.; Aoyagi, T. Near-infrared light-responsive shape-memory poly(ɛ-caprolactone) films that actuate in physiological temperature range. Polym. J. 2014, 46, 492–498. [Google Scholar] [CrossRef]
- Li, F.; Liu, L.; Du, L.; Liu, Y.; Leng, J. Mechanical analysis of a tip-loaded deployable truss based on shape memory polymer composite. Compos. Struct. 2020, 242, 112196. [Google Scholar] [CrossRef]
- Liu, T.; Liu, L.; Yu, M.; Li, Q.; Zeng, C.; Lan, X.; Liu, Y.; Leng, J. Integrative hinge based on shape memory polymer composites: Material, design, properties and application. Compos. Struct. 2018, 206, 164–176. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, M.; Pei, Z.; Xue, Q.; Huang, Y.; Zhi, C. A shape memory supercapacitor and its application in smart energy storage textiles. J. Mater. Chem. A 2016, 4, 1290–1297. [Google Scholar] [CrossRef]
- Roach, D.J.; Yuan, C.; Kuang, X.; Li, V.C.-F.; Blake, P.; Romero, M.L.; Hammel, I.; Yu, K.; Qi, H.J. Long Liquid Crystal Elastomer Fibers with Large Reversible Actuation Strains for Smart Textiles and Artificial Muscles. CS Appl. Mater. Interfaces 2019, 11, 19514–19521. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activation Methods | Activation Mechanism | Advantages | Disadvantages | |
|---|---|---|---|---|
| By heating | Direct heating | Heating the polymer higher than its Ttrans | Simple processing. Cheap. | Low thermal conductivity. Slow response. |
| Indirect | Activation of SMPs via Joule heating by applying an electrical voltage | Faster actuation response due to enhanced thermal and electrical conductivity. High heating efficiency (>90%). | Filler aggregation leads to uneven dispersion of filler, which in its turn leads to losing the percolated network inside the polymer matrix. | |
| Induction heating | Activation of the SMPs via eddy currents induced using an alternating electromagnetic field | Faster actuation response due to enhanced thermal conductivity. Non-contact heating. Ability to control the heating rate and heating temperature by changing the frequency of electromagnetic field. | Generation of a strong electromagnetic field, which can interfere with nearby electrical equipment. | |
| By solvents | Water | Solvent behaves as a plasticizer, leading to enhancing the chain mobility of polymer, which in its turn leads to a reduction in polymer relaxation time and its glass transition temperature | Simple processing. Bistable. | Reduction in mechanical properties because of softening process of solvent. Slow response. |
| Solvent | Solvents can be more adaptable to different environments. | |||
| By light | Photo-reversible cycloaddition reactions | Under exposure of certain light wavelengths, SMPs can efficiently carry out photo-reversible cycloaddition reactions due to presence of light responsive groups | Fast response. | Complicated. Limited processing conditions. |
| Photo-thermal effect | Generating thermal energy from electromagnetic radiation by adding photo-thermal fillers into SMPs matrix | Fast response. Enhanced structural performance. Improved mechanical properties. Improved efficiency of SME. | Complicated. Filler aggregation. | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dayyoub, T.; Maksimkin, A.V.; Filippova, O.V.; Tcherdyntsev, V.V.; Telyshev, D.V. Shape Memory Polymers as Smart Materials: A Review. Polymers 2022, 14, 3511. https://doi.org/10.3390/polym14173511
Dayyoub T, Maksimkin AV, Filippova OV, Tcherdyntsev VV, Telyshev DV. Shape Memory Polymers as Smart Materials: A Review. Polymers. 2022; 14(17):3511. https://doi.org/10.3390/polym14173511
Chicago/Turabian StyleDayyoub, Tarek, Aleksey V. Maksimkin, Olga V. Filippova, Victor V. Tcherdyntsev, and Dmitry V. Telyshev. 2022. "Shape Memory Polymers as Smart Materials: A Review" Polymers 14, no. 17: 3511. https://doi.org/10.3390/polym14173511
APA StyleDayyoub, T., Maksimkin, A. V., Filippova, O. V., Tcherdyntsev, V. V., & Telyshev, D. V. (2022). Shape Memory Polymers as Smart Materials: A Review. Polymers, 14(17), 3511. https://doi.org/10.3390/polym14173511