

Prediction of Wear Rate of Glass-Filled PTFE Composites Based on Machine Learning Approaches

 ,
,  and
and 
Abstract
1. Introduction
2. Material and Methods
2.1. Materials
2.2. Experiment Details
2.3. Machine Learning Approach
2.3.1. Linear Regression (LR) Model
2.3.2. Random Forest
2.3.3. Gradient Boosting
2.3.4. Pearson’s Correlation
3. Result and Discussions
4. Conclusions
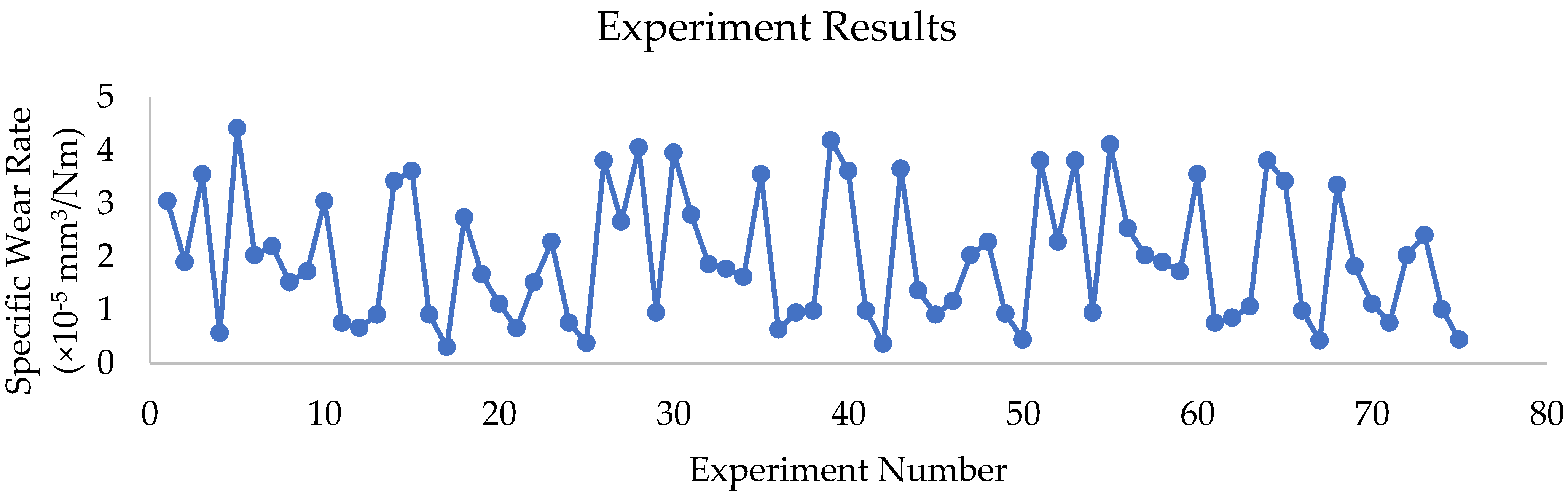
- The experimental results demonstrate a minimal wear rate of 3.04186 × 10−5 mm3/Nm with L of 150 N, SV of 2 m/s, and SD of 5000 m. The highest recorded wear rate was 4.410698 × 10−5 mm3/Nm, with an L of 60 N, SV of 5 m/s, and SD of 5000 m. The experimental data conclude that wear resistance is improved at higher L and larger SD, as it helps create a stable transfer film, resulting in a lower specific wear rate. However, wear is more erratic at lower L and higher SV as it increases frictional heat, which breaks down the transfer film and is subject to sudden increases in wear rate.
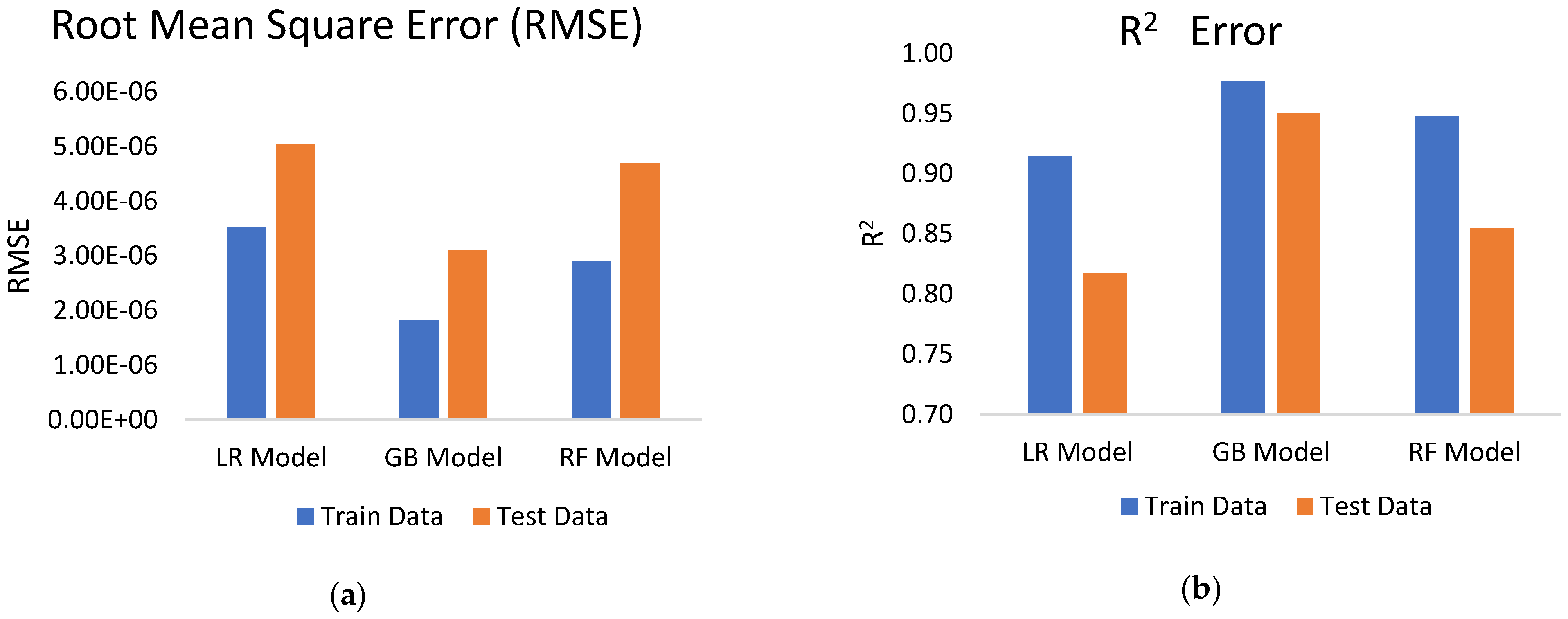
- Machine learning models are effective at predicting wear rate. The gradient boosting algorithm outperforms the random forest and linear regression model. The R2 value of the gradient boosting model is 0.97, which is close to 1, and this indicates the perfect fit on the experimental data. Similarly, among all ML models, the lowest RMSE value of 1.82 × 10−6 is observed for gradient boosting. This clearly shows that the gradient boosting model may be used to accurately forecast the wear rate of PTFE composites.
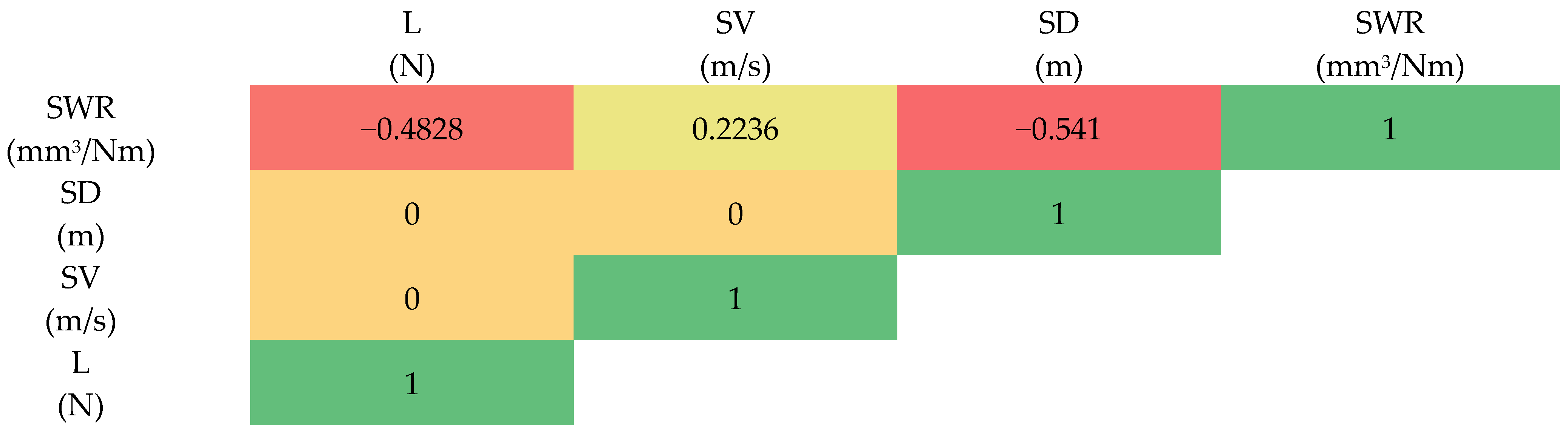
- The Pearson’s correlation value of L, SV, and SD with wear rate is observed as −0.4828, 0.2236, and −0.541, respectively. Hence, it is observed that L and SD have a moderate negative impact on wear rate, i.e., wear rate decreases with an increase in L and SD. However, the SV has a weak positive correlation with the wear rate.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Deshwal, D.; Belgamwar, S.U.; Bekinal, S.I.; Doddamani, M. Role of reinforcement on the tribological properties of polytetrafluoroethylene composites: A comprehensive review. Polym. Compos. 2024, 1–23. [Google Scholar] [CrossRef]
- Rajasekhar, P.; Ganesan, G.; Senthilkumar, C. Modelling and Optimization of Tribological Behavior of Coconut and Jute Fibers with Nano Zno Fillers on Polymer Matrix Composites. J. Manuf. Eng. 2014, 9, 234–241. [Google Scholar]
- Mohammed, A.J.; Mohammed, A.S.; Mohammed, A.S. Prediction of Tribological Properties of UHMWPE/SiC Polymer Composites Using Machine Learning Techniques. Polymers 2023, 15, 4057. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, M.A.; Yahya, M.N.; Şahin, Y. Predicting the mass loss of polytetraflouroethylene-filled composites using artificial intelligence techniques. Bayero J. Eng. Technol. (BJET) 2021, 16, 80–93. [Google Scholar]
- Wang, Y.; Nie, R.; Liu, X.; Wang, S.; Li, Y. Tribological Behavior Analysis of Valve Plate Pair Materials in Aircraft Piston Pumps and Friction Coefficient Prediction Using Machine Learning. Metals 2024, 14, 701. [Google Scholar] [CrossRef]
- Kolhe, S.; Deshpande, A.; Wangikar, K. Wear behavior of polytetrafluoroethylene composites: A review. In Smart Technologies for Energy, Environment and Sustainable Development: Select Proceedings of ICSTEESD; Springer: Berlin/Heidelberg, Germany, 2019; Volume 2018, pp. 571–584. [Google Scholar]
- Virpe, K.; Deshpande, A.; Kulkarni, A. A review on tribological behavior of polymer composite impregnated with carbon fillers. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2020; Volume 2311. [Google Scholar]
- Dhande, D.Y.; Phate, M.R.; Sinaga, N. Comparative analysis of abrasive wear using response surface method and artificial neural network. J. Inst. Eng. Ser. D 2021, 102, 27–37. [Google Scholar] [CrossRef]
- Umanath KP SS, K.; Palanikumar, K.; Selvamani, S.T. Analysis of dry sliding wear behavior of Al6061/SiC/Al2O3 hybrid metal matrix composites. Compos. Part B Eng. 2013, 53, 159–168. [Google Scholar] [CrossRef]
- Marian, M.; Tremmel, S. Current trends and applications of machine learning in tribology—A review. Lubricants 2021, 9, 86. [Google Scholar] [CrossRef]
- Zhang, Z.; Friedrich, K.; Velten, K. Prediction on tribological properties of short fibre composites using artificial neural networks. Wear 2002, 252, 668–675. [Google Scholar] [CrossRef]
- Kordijazi, A.; Roshan, H.M.; Dhingra, A.; Povolo, M.; Rohatgi, P.K.; Nosonovsky, M. Machine-learning methods to predict the wetting properties of iron-based composites. Surf. Innov. 2020, 9, 111–119. [Google Scholar] [CrossRef]
- Kolev, M. XGB-COF: A machine learning software in Python for predicting the friction coefficient of porous Al-based composites with Extreme Gradient Boosting. Softw. Impacts 2023, 17, 100531. [Google Scholar] [CrossRef]
- Hasan, M.S.; Nosonovsky, M. Triboinformatics: Machine learning algorithms and data topology methods for tribology. Surf. Innov. 2022, 10, 229–242. [Google Scholar] [CrossRef]
- Hasan, M.S.; Kordijazi, A.; Rohatgi, P.K.; Nosonovsky, M. Triboinformatics approach for friction and wear prediction of Al-graphite composites using machine learning methods. J. Tribol. 2022, 144, 011701. [Google Scholar] [CrossRef]
- Hasan, M.S.; Kordijazi, A.; Rohatgi, P.K.; Nosonovsky, M. Triboinformatic modeling of dry friction and wear of aluminum base alloys using machine learning algorithms. Tribol. Int. 2021, 161, 107065. [Google Scholar] [CrossRef]
- Wu, D.; Jennings, C.; Terpenny, J.; Gao, R.X.; Kumara, S. A comparative study on machine learning algorithms for smart manufacturing: Tool wear prediction using random forests. J. Manuf. Sci. Eng. 2017, 139, 071018. [Google Scholar] [CrossRef]
- Kiran, M.D.; BR, L.Y.; Babbar, A.; Kumar, R.; HS, S.C.; Shetty, R.P.; Sudeepa, K.B.; Kaur, R.; Alkahtani, M.Q.; Islam, S. Tribological properties of CNT-filled epoxy-carbon fabric composites: Optimization and modelling by machine learning. J. Mater. Res. Technol. 2024, 28, 2582–2601. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, X.; Zhang, X.; Li, S.; Wang, T. Tribological properties study and prediction of PTFE composites based on experiments and machine learning. Tribol. Int. 2023, 188, 108815. [Google Scholar] [CrossRef]
- Yan, Y.; Du, J.; Ren, S.; Shao, M. Prediction of the Tribological Properties of Polytetrafluoroethylene Composites Based on Experiments and Machine Learning. Polymers 2024, 16, 356. [Google Scholar] [CrossRef] [PubMed]
- Makowski, D.; Ben-Shachar, M.S.; Patil, I.; Lüdecke, D. Methods and algorithms for correlation analysis in R. J. Open-Source Softw. 2020, 5, 2306. [Google Scholar] [CrossRef]
- Kharate, N.; Anerao, P.; Kulkarni, A.; Abdullah, M. Explainable AI Techniques for Comprehensive Analysis of the Relationship between Process Parameters and Material Properties in FDM-Based 3D-Printed Biocomposites. J. Manuf. Mater. Process. 2024, 8, 171. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Composition | Volume Fraction (%) | |
|---|---|---|
| PTFE | Glass | |
| 1 | 80 | 20 |
| Property | Standard | Value |
|---|---|---|
| Colour | Visual | White |
| Density (g/cc) | ASTM D-638 [7] | 2.1–2.3 |
| Tensile Strength (MPa) | ASTM D-638 [7] | 17 |
| Hardness (Shore D) | ASTM D-2240 [7] | 56–57 |
| Test Parameter Levels | |||
|---|---|---|---|
| Level | L (N) | SV (m/s) | SD (m) |
| 1 | 60 | 1 | 1000 |
| 2 | 90 | 2 | 2000 |
| 3 | 120 | 3 | 3000 |
| 4 | 150 | 4 | 4000 |
| 5 | 180 | 5 | 5000 |
| Experiment No | L (N) | SV (m/s) | SD (m) | SWR (×10−5 mm3/Nm) | ||
|---|---|---|---|---|---|---|
| Trail 1 | Trail 2 | Trail 3 | ||||
| 1 | 60 | 1 | 1000 | 3.041860 | 3.802326 | 3.802326 |
| 2 | 60 | 2 | 2000 | 1.901163 | 2.661628 | 2.281395 |
| 3 | 60 | 3 | 3000 | 3.548837 | 4.055814 | 3.802326 |
| 4 | 60 | 4 | 4000 | 0.570349 | 0.950581 | 0.950581 |
| 5 | 60 | 5 | 5000 | 4.410698 | 3.954419 | 4.106512 |
| 6 | 90 | 1 | 2000 | 2.027907 | 2.788372 | 2.534884 |
| 7 | 90 | 2 | 3000 | 2.196899 | 1.858915 | 2.027907 |
| 8 | 90 | 3 | 4000 | 1.520930 | 1.774419 | 1.901163 |
| 9 | 90 | 4 | 5000 | 1.723721 | 1.622326 | 1.723721 |
| 10 | 90 | 5 | 1000 | 3.041860 | 3.548837 | 3.548837 |
| 11 | 120 | 1 | 3000 | 0.760465 | 0.633721 | 0.760465 |
| 12 | 120 | 2 | 4000 | 0.665407 | 0.950581 | 0.855523 |
| 13 | 120 | 3 | 5000 | 0.912558 | 0.988605 | 1.064651 |
| 14 | 120 | 4 | 1000 | 3.422093 | 4.182558 | 3.802326 |
| 15 | 120 | 5 | 2000 | 3.612209 | 3.612209 | 3.422093 |
| 16 | 150 | 1 | 4000 | 0.912558 | 0.988605 | 0.988605 |
| 17 | 150 | 2 | 5000 | 0.304186 | 0.365023 | 0.425860 |
| 18 | 150 | 3 | 1000 | 2.737674 | 3.650233 | 3.346047 |
| 19 | 150 | 4 | 2000 | 1.673023 | 1.368837 | 1.825116 |
| 20 | 150 | 5 | 3000 | 1.115349 | 0.912558 | 1.115349 |
| 21 | 180 | 1 | 5000 | 0.659070 | 1.166047 | 0.760465 |
| 22 | 180 | 2 | 1000 | 1.520930 | 2.027907 | 2.027907 |
| 23 | 180 | 3 | 2000 | 2.281395 | 2.281395 | 2.408140 |
| 24 | 180 | 4 | 3000 | 0.760465 | 0.929457 | 1.013953 |
| 25 | 180 | 5 | 4000 | 0.380233 | 0.443605 | 0.443605 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deshpande, A.R.; Kulkarni, A.P.; Wasatkar, N.; Gajalkar, V.; Abdullah, M. Prediction of Wear Rate of Glass-Filled PTFE Composites Based on Machine Learning Approaches. Polymers 2024, 16, 2666. https://doi.org/10.3390/polym16182666
Deshpande AR, Kulkarni AP, Wasatkar N, Gajalkar V, Abdullah M. Prediction of Wear Rate of Glass-Filled PTFE Composites Based on Machine Learning Approaches. Polymers. 2024; 16(18):2666. https://doi.org/10.3390/polym16182666
Chicago/Turabian StyleDeshpande, Abhijeet R., Atul P. Kulkarni, Namrata Wasatkar, Vaibhav Gajalkar, and Masuk Abdullah. 2024. "Prediction of Wear Rate of Glass-Filled PTFE Composites Based on Machine Learning Approaches" Polymers 16, no. 18: 2666. https://doi.org/10.3390/polym16182666
APA StyleDeshpande, A. R., Kulkarni, A. P., Wasatkar, N., Gajalkar, V., & Abdullah, M. (2024). Prediction of Wear Rate of Glass-Filled PTFE Composites Based on Machine Learning Approaches. Polymers, 16(18), 2666. https://doi.org/10.3390/polym16182666