From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management



Abstract
:1. Introduction
2. Data-Driven Agriculture: Agriculture 4.0
2.1. Internet of Things: Collecting Information
2.2. Big Data: Analysis of Massive Data
- Volume refers to datasets whose size is beyond the ability of typical database software tools to capture, store, manage, and analyze information. This definition includes an estimate of how big a dataset needs to be in order to be considered big, and it can vary by study sector, depending on software tools that are commonly available and common sizes of datasets, typically starting in the terabyte range [16].
- Velocity refers to the capability to acquire, understand and interpret events as they occur. In agriculture, this would refer to applications that occur in real time, like data being processed right in the field to apply variable rates of chemicals in equipment featuring variable rate application technologies.
- Variety refers to the different data formats (videos, text, voice), and the diverse degrees of complexity. This situation is not strange in agriculture when different data sources are used to work in complex scenarios such as images and soil or weather probes.
- Veracity refers to the quality, reliability, and overall confidence of the data.
- Valorization is the ability to propagate knowledge, appreciation and innovation [18].
2.3. Agriculture 5.0: Robotics and Artificial Intelligence (AI) to Help in Nourishing People
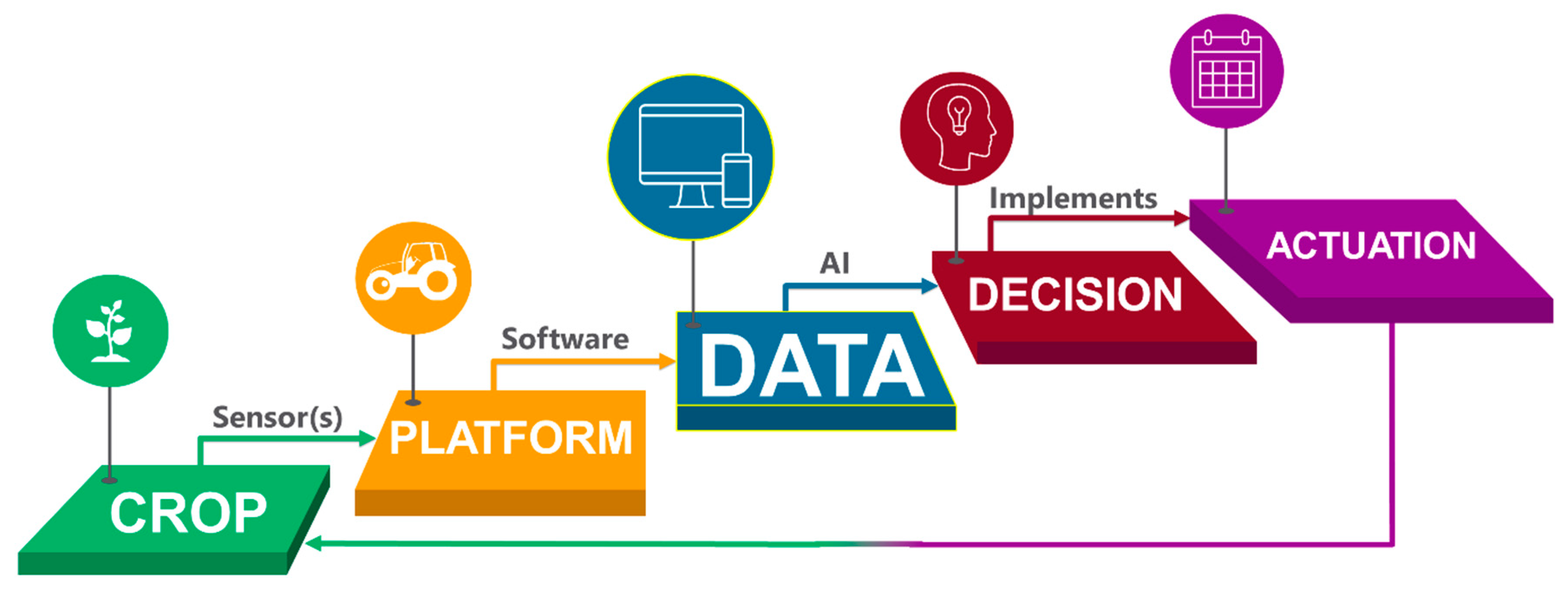
3. Data-Driven Management for Advanced Farming: Principal Stages
3.1. Stage I: The Crop as the Beginning and End of the Agricultural Management Cycle—Analyzing Variability
3.2. Stage II: Platforms Supporting Sensors
3.2.1. Remote Sensing Platforms: Satellites
3.2.2. Aircraft Systems
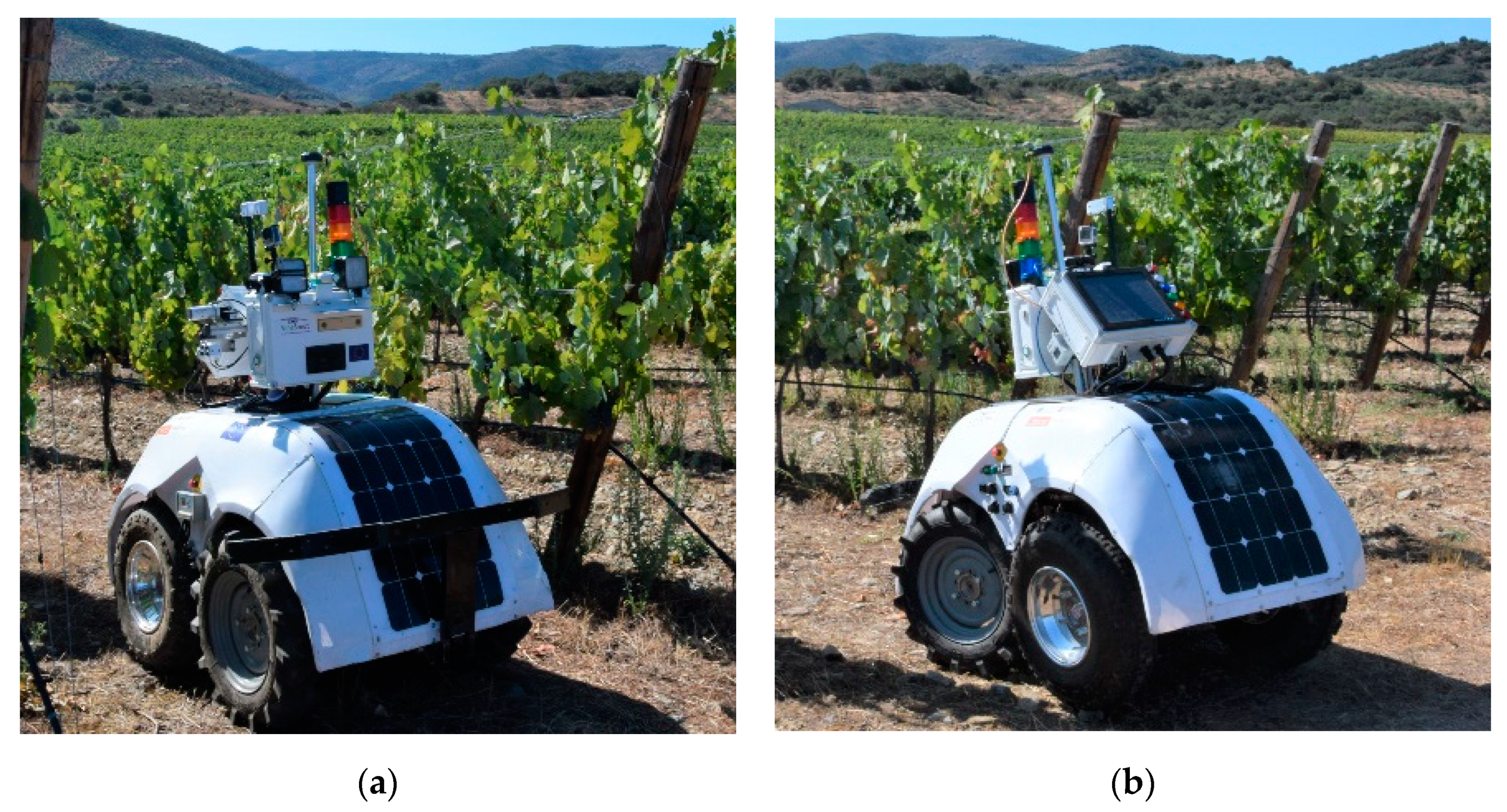
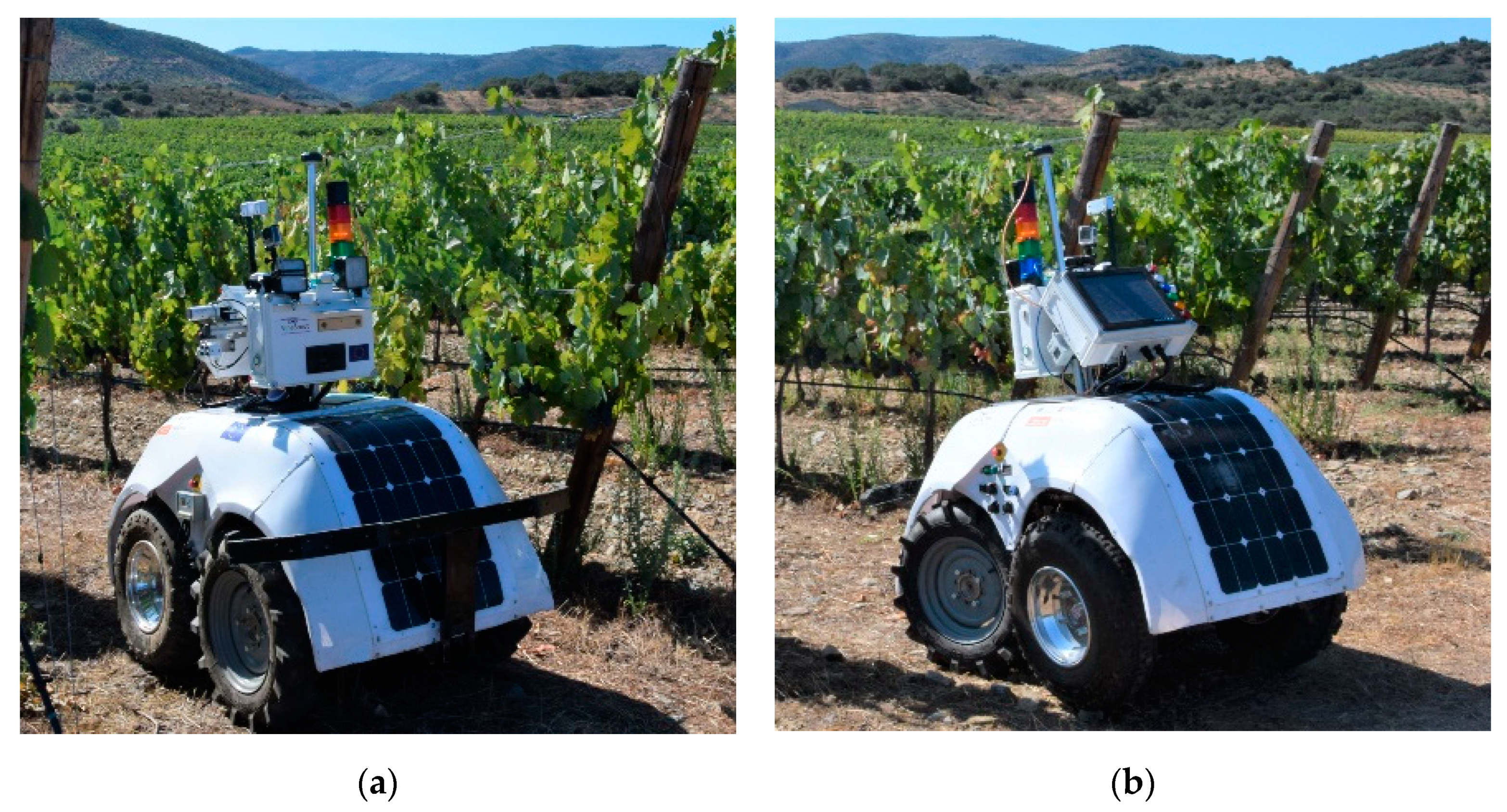
3.2.3. Proximal Sensing: Ground Autonomous Systems—the Great Push for Agriculture 5.0
3.3. Stage III: Data
3.3.1. Maps Containing Relevant Field Features
3.3.2. Data Management Software to Ease the Process of Decision Making
3.4. Stage IV: Decision-Making
3.5. Stage V: Actuation through Variable Rate Technology
4. Discussion
- Precision Agriculture, which consists of applying what is needed when and where is needed, has further improved the efficiency of managing farms with the addition of data-based digital systems that increase the knowledge of producers about their fields; this is known as Agriculture 4.0 or Digital Farming. When these data-driven farms incorporate robotics with AI algorithms to their systems, the overall concept is then referred to as Agriculture 5.0. Some studies report that agricultural robots integrating forms of AI can do certain tasks faster than humans [23]. Despite there are other studies that contradict this statement [63], robotics is a growing economy and there exists a great potential for many applications within agriculture.
- A greater adoption of Digital Farming by professional growers is vital to not only improving a farm’s financial performance, but also to meet the food needs of an expanding population [6]. Small farms will steadily incorporate basic technology whereas large fields will likely invest with sophisticated equipment, but data-less intuition-driven management will no longer represent the modus operandi of professional farms in the future. This should be considered a source of opportunities, especially for a new generation of young farmers used to digital technology, who are the ones with the capacity to balance an aging population in rural areas, mainly those in industrialized countries.
- After the rapid growth of UAVs, a steady-state is being reached, mostly induced by the fact that data analysis and ground-truth validation has resulted far more complex and delicate than image acquisition and platform handling. This has promoted the expansion of proximal sensing and the exploration of combining both data sources—aerial and terrestrial—for a better understanding of the physiology of plants and trees.
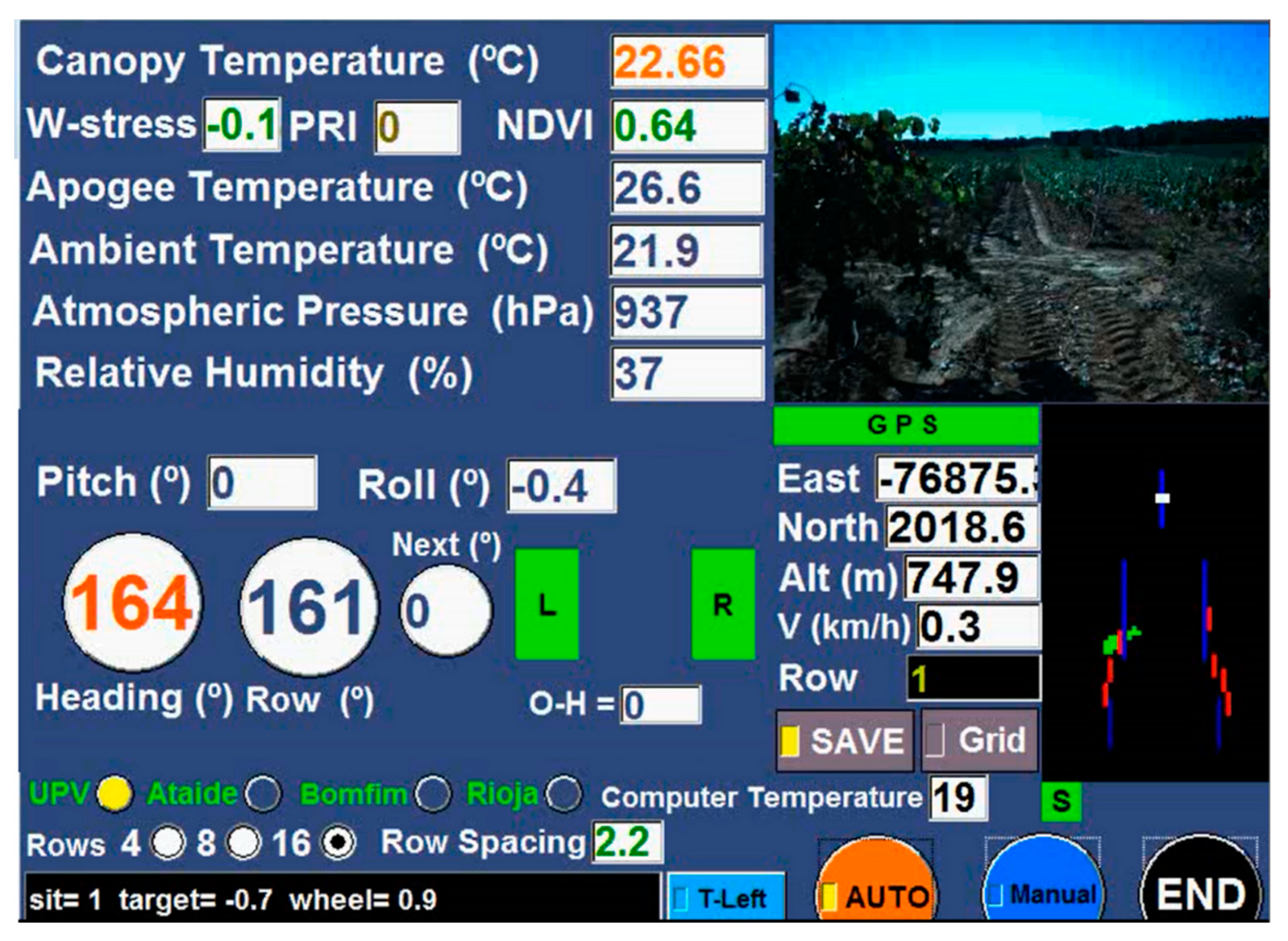
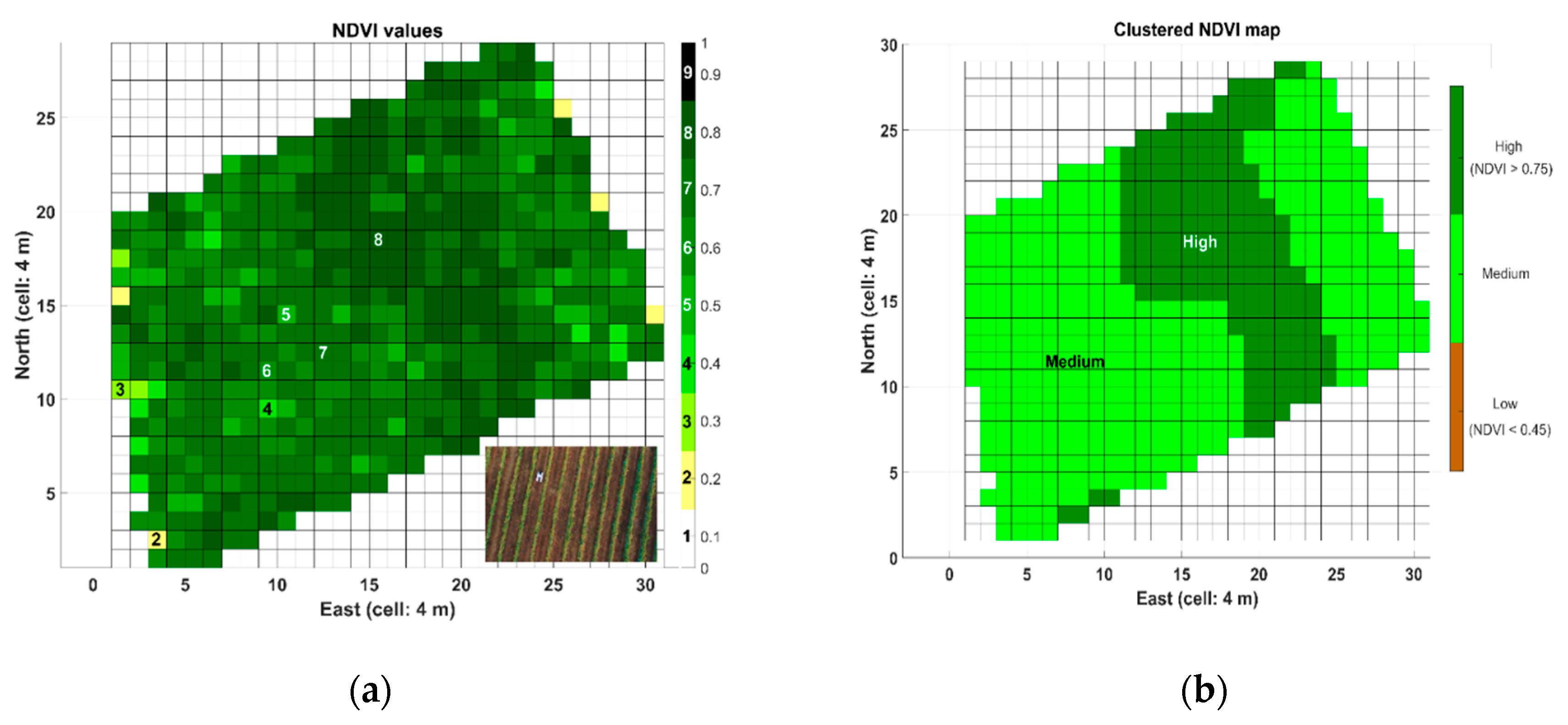
- Maps, as the most common way to represent agricultural data, would need to be standardized. Intensely-interpolated colored maps are output by GIS, FMIS, and other software applications, but at the time of comparing data with the precision enough to grant statistical significance, it often becomes an impossible mission without standardization. Figure 3, for example, uses the flat representation provided by the local tangent plane (LTP) and formatted in a regular grid. Other programs use UTM projections, and there are even images only given in geodetic coordinates. At the need of overlapping maps, it takes a big effort to make all data compatible. Not only the way coordinates are represented needs a standard, but also the units, intervals, and even colors in which parameters are displayed. The combination of aerial and ground data, for instance, will greatly benefit from such standardization in the way data is visually displayed for the average grower to understand.
- Table 2 provides a representative compilation of software applications for farm management. The list is not exhaustive, and yet includes companies from four continents and 14 countries, which provides evidence of the fact that agricultural digitalization is in fact a global move.
- Regarding variable rate applications, adoption rates need to augment, and to do so, farmers must find by themselves the value in this technology for their crops. Only after maintaining accurate spatial records and analyzing field data can effective variable rate prescriptions be created [39] to address particular tasks.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Himesh, S. Digital revolution and Big Data: A new revolution in agriculture. CAB Rev. 2018, 13, 1–7. [Google Scholar] [CrossRef]
- Zhang, Y. The Role of Precision Agriculture. Resource 2019, 19, 9. [Google Scholar]
- Schimmelpfennig, D. Farm Profits and Adoption of Precision Agriculture. USDA 2016, 217, 1–46. [Google Scholar]
- Grand View Research. Precision Farming Market Analysis. Estimates and Trend Analysis; Grand View Research Inc.: San Francisco, CA, USA, 2019; pp. 1–58. [Google Scholar]
- Díez, C. Hacia una agricultura inteligente (Towards and intelligent Agriculture). Cuaderno de Campo 2017, 60, 4–11. [Google Scholar]
- Accenture Digital. Digital Agriculture: Improving Profitability. Available online: https://www.accenture.com/_acnmedia/accenture/conversion-assets/dotcom/documents/global/pdf/digital_3/accenture-digital-agriculture-point-of-view.pdf (accessed on 29 December 2019).
- CEMA. Digital Farming: What Does It Really Mean? Available online: http://www.cema-agri.org/publication/digital-farming-what-does-it-really-mean (accessed on 17 September 2019).
- Nierenberg, D. Agriculture Needs to Attract More Young People. Available online: http://www.gainhealth.org/knowledge-centre/worlds-farmers-age-new-blood-needed (accessed on 18 September 2019).
- European Comission. Generational Renewal in EU Agriculture: Statistical Background; DG Agriculture & Rural Development: Economic analysis of EU agriculture unit: Brussels, Belgium, 2012; pp. 1–10. [Google Scholar]
- Paneva, V. Generational Renewal. Available online: https://enrd.ec.europa.eu/enrd-thematic-work/generational-renewal_en (accessed on 28 December 2019).
- Alpha Brown. What is IoT in Agriculture? Farmers Aren’t Quite Sure Despite $4bn US Opportunity—Report. Available online: https://agfundernews.com/iot-agriculture-farmers-arent-quite-sure-despite-4bn-us-opportunity.html (accessed on 28 December 2019).
- Gralla, P. Precision Agriculture Yields Higher Profits, Lower Risks. Available online: https://www.hpe.com/us/en/insights/articles/precision-agriculture-yields-higher-profits-lower-risks-1806.html (accessed on 29 December 2019).
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Sarni, W.; Mariani, J.; Kaji, J. From Dirt to Data: The Second Green Revolution and IoT. Deloitte insights. Available online: https://www2.deloitte.com/insights/us/en/deloitte-review/issue-18/second-green-revolution-and-internet-of-things.html#endnote-sup-9 (accessed on 18 September 2019).
- Myklevy, M.; Doherty, P.; Makower, J. The New Grand Strategy; St. Martin’s Press: New York, NY, USA, 2016; p. 271. [Google Scholar]
- Manyica, J.; Chui, M.; Brown, B.; Bughin, J.; Dobbs, R.; Roxburgh, C.; Hung Byers, A. Big Data: The Next Frontier for Innovation, Competition, and Productivity | McKinsey. Available online: https://www.mckinsey.com/business-functions/mckinsey-digital/our-insights/big-data-the-next-frontier-for-innovation (accessed on 21 November 2019).
- Kunisch, M. Big Data in Agriculture—Perspectives for a Service Organization. Landtechnik 2016, 71, 1–3. [Google Scholar] [CrossRef]
- Kamilaris, A.; Kartakoullis, A.; Prenafeta-Boldú, F.X. A review on the practice of big data analysis in agriculture. Comput. Electron. Agric. 2017, 143, 23–37. [Google Scholar] [CrossRef]
- Proagrica. How Big Data Will Change Agriculture. Available online: https://proagrica.com/news/how-big-data-will-change-agriculture/ (accessed on 21 November 2019).
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.-J. Big Data in Smart Farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- CIAT & IFPRI. Big Data Coordination Platform. Proposal to the CGIAR Fund Council. Available online: https://cgspace.cgiar.org/handle/10947/4303 (accessed on 17 September 2019).
- Zambon, I.; Cecchini, M.; Egidi, G.; Saporito, M.G.; Colantoni, A. Revolution 4.0: Industry vs. Agriculture in a Future Development for SMEs. Processes 2019, 7, 36. [Google Scholar] [CrossRef] [Green Version]
- Walch, K. How AI Is Transforming Agriculture. Available online: https://www.forbes.com/sites/cognitiveworld/2019/07/05/how-ai-is-transforming-agriculture/ (accessed on 1 January 2020).
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Bergerman, M.; Billingsley, J.; Reid, J.; van Henten, E. Robotics in Agriculture and Forestry. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer Handbooks; Springer International Publishing: Cham, Switzerland, 2016; pp. 1463–1492. ISBN 978-3-319-32552-1. [Google Scholar]
- Shamshiri, R.R.; Weltzien, C.; Hameed, I.A.; Yule, I.J.; Grift, T.E.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1–14. [Google Scholar] [CrossRef]
- Reddy, N.; Reddy, A.; Kumar, J. A critical review on agricultural robots. Int. J. Mech. Eng. Technol. (IJMET) 2016, 7, 6. [Google Scholar]
- Lamborelle, A.; Fernández Álvarez, L. Farming 4.0: The Future of Agriculture? Available online: https://www.euractiv.com/section/agriculture-food/infographic/farming-4-0-the-future-of-agriculture/ (accessed on 21 November 2019).
- Sonka, S. Big Data and the Ag Sector: More than Lots of Numbers. Int. Food Agribus. Manag. Rev. 2014, 17, 1–20. [Google Scholar]
- CBINSIGHTS. Ag Tech Deal Activity More Than Triples. Available online: https://www.cbinsights.com/research/agriculture-farm-tech-startup-funding-trends/ (accessed on 18 February 2019).
- Verified Market Intelligence. Global Agriculture Robots. Market Size, Status and Forecast to 2025; Verified Market Intelligence Inc.: Boonton, NJ, USA, 2018; pp. 1–79. [Google Scholar]
- Varadharajan, D. AI, Robotics, And the Future of Precision Agriculture. Available online: https://www.cbinsights.com/research/ai-robotics-agriculture-tech-startups-future/ (accessed on 21 November 2019).
- Murugesan, R.; Sudarsanam, S.K.; Malathi, G.; Vijayakumar, V.; Neelanarayanan, V.; Venugopal, R.; Rekha, D.; Summit, S.; Rahul, B.; Atishi, M.; et al. Artificial Intelligence and Agriculture 5. 0. Int. J. Recent Technol. Eng. (IJRTE) 2019, 8, 8. [Google Scholar]
- Zhang, Q. Precision Agriculture Technology for Crop Farming, 1st ed.; CRC Press and Taylor & Francis Group: Boca Raton, FL, USA, 2015; ISBN 978-1-4822-5107-4. [Google Scholar]
- Rovira-Más, F. (Coordinator). VineScout European Project. Available online: www.vinescout.eu (accessed on 21 November 2019).
- Searcy, S.W. Precision Farming: A New Approach to Crop Management. Available online: http://agpublications.tamu.edu/pubs/eng/l5177.pdf (accessed on 21 November 2019).
- Zhang, N.; Wang, M.; Wang, N. Precision agriculture—A worldwide overview. Comput. Electron. Agric. 2002, 36, 113–132. [Google Scholar] [CrossRef]
- Brasse, T. Precision Agriculture, 1st ed.; Thomson Delmar Learning: Clifton Park, NY, USA, 2006; ISBN 1-4018-8105-X. [Google Scholar]
- Sethuramasamyraja, B. Precision Ag Research at California State University, Fresno. Resource 2017, 24, 18–19. [Google Scholar]
- Miao, Y.; Mulla, D.J.; Robert, P.C. An integrated approach to site-specific management zone delineation. Front. Agric. Sci. Eng. 2018, 5, 432–441. [Google Scholar] [CrossRef] [Green Version]
- Klassen, S.P.; Villa, J.; Adamchuk, V.; Serraj, R. Soil mapping for improved phenotyping of drought resistance in lowland rice fields. Field Crops Res. 2014, 167, 112–118. [Google Scholar] [CrossRef]
- Buttafuoco, G.; Lucà, F. The Contribution of Geostatistics to Precision Agriculture. Ann. Agric. Crop Sci. 2016, 1, 1008–1009. [Google Scholar]
- Khanal, S.; Fulton, J.; Shearer, S. An overview of current and potential applications of thermal remote sensing in precision agriculture. Comput. Electron. Agric. 2017, 139, 22–32. [Google Scholar] [CrossRef]
- Rudd, J.D.; Roberson, G.T.; Classen, J.J. Application of satellite, unmanned aircraft system, and ground-based sensor data for precision agriculture: A review. In Proceedings of the 2017 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers, Spokane, WA, USA, 16–19 July 2017. [Google Scholar]
- Liebisch, F.; Pfeifer, J.; Khanna, R.; Lottes, P.; Stachniss, C.; Falck, T.; Sander, S.; Siegwart, R.; Walter, A.; Galceran, E. Flourish—A robotic approach for automation in crop management. In Proceedings of the 22 Workshop Computer-Bildanalyse und Unbemannte autonom fliegende Systeme in der Landwirtschaft, Postdam, Germany, 27 April 2017; pp. 1–11. [Google Scholar]
- Lameski, P.; Zdravevski, E.; Kulakov, A. Review of Automated Weed Control Approaches: An Environmental Impact Perspective. In Proceedings of the ICT Innovations 2018 Engineering and Life Sciences; Kalajdziski, S., Ackovska, N., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 132–147. [Google Scholar]
- Aravind, K.R.; Raja, P.; Pérez-Ruiz, M. Task-based agricultural mobile robots in arable farming: A review. Span. J. Agric. Res. 2017, 15, 1–16. [Google Scholar] [CrossRef]
- Roldán, J.J.; del Cerro, J.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; de León, J.; Barrientos, A. Robots in Agriculture: State of Art and Practical Experiences. In Service Robots; Neves, A.J.R., Ed.; IntechOpen: Rijeka, Croatia, 2017. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez-de-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Lopez-Granados, F.; Brandstoetter, M.; Tomic, S.; Pedrazzi, S.; Peruzzi, A.; Pajares, G.; Kaplanis, G.; et al. Fleets of robots for environmentally-safe pest control in agriculture. Precis. Agric. 2017, 18, 574–614. [Google Scholar] [CrossRef]
- Tobe, F. What’s Slowing the Use of Robots in the Ag Industry? Available online: https://www.therobotreport.com/whats-slowing-the-use-of-robots-in-the-ag-industry/ (accessed on 21 November 2019).
- Bogue, R. Robots poised to revolutionise agriculture. Ind. Robot 2016, 43, 450–456. [Google Scholar] [CrossRef]
- Diago, M.P.; Rovira-Más, F.; Saiz-Rubio, V.; Faenzi, E.; Evain, S.; Ben Ghozlen, N.; Labails, S.; Stoll, M.; Scheidweiler, M.; Millot, C.; et al. The “eyes” of the VineRobot: Non-destructive and autonomous vineyard monitoring on-the-go. In Proceedings of the 62nd German Winegrowers’ Congress, Sttutgart, Germany, 27–30 November 2016. [Google Scholar]
- Saiz-Rubio, V.; Diago, M.; Rovira-Más, F.; Cuenca, A.; Gutiérrez, S.; Tardáguila, J. Physical requirements for vineyard monitoring robots. In Proceedings of the XIX World Congress of CIGR, Antalya, Turkey, 22–25 April 2018; pp. 1–4. [Google Scholar]
- Naïo Technologies. Features & Benefits OZ Weeding Robot. Available online: https://www.naio-technologies.com/en/agricultural-equipment/weeding-robot-oz/ (accessed on 21 November 2019).
- Thomson, G. The global unmanned spray system (GUSS). Resource 2019, 26, 9–10. [Google Scholar]
- Cavender-Bares, K.; Lofgren, J.B. Robotic Platform and Method for Performing Multiple Functions in Agricultural Systems. U.S. Patent US9265187B2, 23 February 2016. [Google Scholar]
- Hameed, I.A. A Coverage Planner for Multi-Robot Systems in Agriculture. In Proceedings of the IEEE International Conference on Real-time Computing and Robotics (RCAR), Kandima, Maldives, 1–5 August 2018; pp. 698–704. [Google Scholar]
- Ball, D.; Ross, P.; English, A.; Patten, T.; Upcroft, B.; Fitch, R. Robotics for Sustainable Broad-Acre Agriculture. Available online: https://www.researchgate.net/publication/283722961_Robotics_for_Sustainable_Broad-Acre_Agriculture (accessed on 21 November 2019).
- Tobe, F. The Ultimate Guide to Agricultural Robotics. Available online: https://www.roboticsbusinessreview.com/agriculture/the_ultimate_guide_to_agricultural_robotics/ (accessed on 21 November 2019).
- Kweon, G.; Lund, E.; Maxton, C. Soil organic matter and cation-exchange capacity sensing with on-the-go electrical conductivity and optical sensors. Geoderma 2013, 199, 80–89. [Google Scholar] [CrossRef]
- Thomasson, A.; Baillie, C.; Antile, D.; Lobsey, C.; McCarthy, C. Autonomous Technologies in Agricultural Equipment: A Review of the State of the Art. In Proceedings of the 2019 Agricultural Equipment Technology Conference, Louisville, KY, USA, 11–13 February 2019; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2019. ASABE Publication Number 913C0119. [Google Scholar]
- Sennaar, K. Agricultural Robots—Present and Future Applications (Videos Included). Available online: https://emerj.com/ai-sector-overviews/agricultural-robots-present-future-applications/ (accessed on 1 January 2020).
- Köksal, Ö.; Tekinerdogan, B. Architecture design approach for IoT-based farm management information systems. Precis. Agric. 2019, 20, 926–958. [Google Scholar] [CrossRef] [Green Version]
- Rovira-Más, F.; Saiz-Rubio, V. Crop Biometric Maps: The Key to Prediction. Sensors 2013, 13, 12698–12743. [Google Scholar] [CrossRef] [Green Version]
- Oliver, M.; Webster, R. A tutorial guide to Geostatistics: Computing and modelling variograms and kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Saiz-Rubio, V.; Rovira-Más, F. Proximal sensing mapping method to generate field maps in vineyards. Agric. Eng. Int. CIGR J. 2013, 15, 47–59. [Google Scholar]
- Adamchuk, V.I.; Hummel, J.W.; Morgan, M.T.; Upadhyaya, S.K. On-the-go soil sensors for precision agriculture. Comput. Electron. Agric. 2004, 44, 71–91. [Google Scholar] [CrossRef] [Green Version]
- Cossell, S.; Whitty, M.; Liu, S.; Tang, J. Spatial Map Generation from Low Cost Ground Vehicle Mounted Monocular Camera. IFAC PapersOnLine 2016, 49, 231–236. [Google Scholar] [CrossRef]
- Zhang, N.; Taylor, R.K. Applications of a Field–Level Geographic Information System (FIS) in Precision Agriculture. Appl. Eng. Agric. 2001, 17, 885–892. [Google Scholar] [CrossRef] [Green Version]
- Runquist, S.; Zhang, N.; Taylor, R.K. Development of a field-level geographic information system. Comput. Electron. Agric. 2001, 31, 201–209. [Google Scholar] [CrossRef]
- Burlacu, G.; Costa, R.; Sarraipa, J.; Jardim-Golcalves, R.; Popescu, D. A Conceptual Model of Farm Management Information System for Decision Support. In Proceedings of the Technological Innovation for Collective Awareness Systems; Camarinha-Matos, L.M., Barrento, N.S., Mendonça, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 47–54. [Google Scholar]
- Schmaltz, R.; Coolidge, M.; Donald, G. Agricultural Enterprise Management Method and System. Canada Patent CA2967518A1, 11 May 2017. [Google Scholar]
- Coolidge, M.; Schmaltz, R.; Schmaltz, T. Crop Management Method and System. U.S. Patent WO/2018/187870, 4 October 2018. [Google Scholar]
- Wilbur, M.; Ellsworth, J.; Oommen, T.; Mohapatra, A.; Thayer, D. Systems and Methods for Cloud-Based Agricultural Data Processing and Management. U.S. Patent US9667710B2, 30 May 2017. [Google Scholar]
- Granular Farm Management Software, Precision Agriculture, Agricultural Software. Available online: https://granular.ag/ (accessed on 21 March 2019).
- Ruland, S. AgGateway’s Agricultural Data Application Programming Toolkit (ADAPT). Resource 2019, July/August 2019. [Google Scholar]
- Capterra Inc. Capterra. Farm Management Software. Available online: www.capterra.com (accessed on 21 March 2019).
- PAT RESEARCH. Top 9 Farm Management Software—Compare Reviews, Features, Pricing in 2019. Available online: https://www.predictiveanalyticstoday.com/top-farm-management-software/ (accessed on 21 November 2019).
- Srivastava, P.K.; Singh, R.M. GIS based integrated modelling framework for agricultural canal system simulation and management in Indo-Gangetic plains of India. Agric. Water Manag. 2016, 163, 37–47. [Google Scholar] [CrossRef]
- Giusti, E.; Marsili-Libelli, S. A Fuzzy Decision Support System for irrigation and water conservation in agriculture. Environ. Model. Softw. 2015, 63, 73–86. [Google Scholar] [CrossRef]
- Drenjanac, D.; Tomic, S.; Hinterhofer, T. User interactions and network monitoring ease decision-making in a robotic fleet for Precision Agriculture. In Proceedings of the Second International Conference on Robotics and Associated High-technologies and Equipment for Agriculture and Forestry (RHEA 2014), Madrid, Spain, 21–23 May 2014. [Google Scholar]
- Asfaw, D.; Black, E.; Brown, M.; Nicklin, K.J.; Otu-Larbi, F.; Pinnington, E.; Challinor, A.; Maidment, R.; Quaife, T. TAMSAT-ALERT v1: A new framework for agricultural decision support. Geosci. Model Dev. 2018, 11, 2353–2371. [Google Scholar] [CrossRef] [Green Version]
- Hoogenboom, G.; Porter, C.H.; Shelia, V.; Boote, K.J.; Singh, U.; White, J.W.; Hunt, L.A.; Ogoshi, R.; Lizaso, J.; Koo, J.; et al. Decision Support System for Agrotechnology Transfer (DSSAT) Version 4.7.5; DSSAT Foundation: Gainesville, FL, USA. Available online: https://dssat.net (accessed on 1 January 2020).
- Rupp, C.E.; Kull, A.C.S.; Pitstick, S.R.; Dumstorff, P.L. Generating an Agriculture Prescription. U.S. Patent US9974226B2, 22 May 2018. [Google Scholar]
- Lindores, R.J. Generating a Crop Recommendation. U.S. Patent US20140012732A1, 9 January 2014. [Google Scholar]
- Navarro-Hellín, H.; Martínez-del-Rincon, J.; Domingo-Miguel, R.; Soto-Valles, F.; Torres-Sánchez, R. A decision support system for managing irrigation in agriculture. Comput. Electron. Agric. 2016, 124, 121–131. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Sah, B.; Singh, A.R.; Deng, Y.; He, X.; Kumar, P.; Bansal, R.C. A review of multi criteria decision making (MCDM) towards sustainable renewable energy development. Renew. Sustain. Energy Rev. 2017, 69, 596–609. [Google Scholar] [CrossRef]
- Rupnik, R.; Kukar, M.; Vračar, P.; Košir, D.; Pevec, D.; Bosnić, Z. AgroDSS: A decision support system for agriculture and farming. Comput. Electron. Agric. 2019, 161, 260–271. [Google Scholar] [CrossRef]
- Rose, D.C.; Sutherland, W.J.; Parker, C.; Lobley, M.; Winter, M.; Morris, C.; Twining, S.; Ffoulkes, C.; Amano, T.; Dicks, L.V. Decision support tools for agriculture: Towards effective design and delivery. Agric. Syst. 2016, 149, 165–174. [Google Scholar] [CrossRef] [Green Version]
- ASABE AE50 Awards. Resour. Eng. Technol. Sustain. World 2019, 19, 4–16.
- Colaço, A.F.; Molin, J.P. Variable rate fertilization in citrus: A long term study. Precis. Agric. 2017, 18, 169–191. [Google Scholar] [CrossRef]
- Nawar, S.; Corstanje, R.; Halcro, G.; Mulla, D.; Mouazen, A.M. Delineation of Soil Management Zones for Variable-Rate Fertilization. Adv. Agron. 2017, 143, 175–245. [Google Scholar] [CrossRef]
- Saiz-Rubio, V.; Rovira-Más, F. VineScout_ROBOTdata_22July2019_TN102. Zenodo 2019. [Google Scholar] [CrossRef]
- Fountas, S.; Carli, G.; Sørensen, C.G.; Tsiropoulos, Z.; Cavalaris, C.; Vatsanidou, A.; Liakos, B.; Canavari, M.; Wiebensohn, J.; Tisserye, B. Farm management information systems: Current situation and future perspectives. Comput. Electron. Agric. 2015, 115, 40–50. [Google Scholar] [CrossRef] [Green Version]
- Kritikos, M. Precision Agriculture in Europe: Legal, Social and Ethical Considerations—Think Tank. Available online: http://www.europarl.europa.eu/thinktank/en/document.html?reference=EPRS_STU(2017)603207 (accessed on 21 November 2019).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Subcategory | References |
|---|---|---|
CROP | Precision and Smart Farming | [2,4,7,29,35,37,38,39,40] |
| Social and economic impact | [3,5,6,8,9,10,11,31] | |
| Management zones | [38,41,42,43] | |
PLATFORM | Remote sensing (satellite and aircraft) | [44,45,46] |
| Proximal sensing (ground vehicles) | [24,25,26,27,28,36,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63] | |
DATA | Big data | [1,16,17,18,19,20,21,30,32] |
| Internet of Things (IoT) | [12,13,14,64] | |
| Mapping | [42,65,66,67,68,69] | |
| Information Systems (GIS, FMIS) | [64,70,71,72,73,74,75,76,77,78,79,80] | |
DECISION | Artificial Intelligence (AI) | [22,23,33,34,81] |
| Decision Support Systems (DSS) | [77,82,83,84,85,86,87,88,89,90] | |
ACTUATION | Variable Rate Applications (VRA) | [91,92,93] |
| Software | Company | Headquarters | Relevant Features |
|---|---|---|---|
| ADAPT | AgGatekeeper | Washington DC, USA | Input/output translator to manage data among controllers, field equipment, and farm management information system (FMIS) in an adequate format. Open-source system offered at no cost for developers to adopt into their proprietary systems. |
| AGERmetrix | AGERpoint | Florida, USA | Crop data and analytics platform with mapping interface. Able to scan and collect high-resolution crop data through LiDAR and other collaborative techniques. Permits taking data on mobile devices. |
| AgHub | GiSC | Texas, USA | Independent solution by a cooperative. Collect and securely stores data. Data can be shared with trusted advisors. Integration from IBM’s Weather Operations, Main Street Data Validator, and Market Vision. |
| Agrivi | Agrivi | United Kingdom | Weather, field mapping, plan inventory. Crop, machinery, and personnel management (notifications and reports). Web-based and mobile versions. Upgrades and Add-ons. |
| Agroptima | Agroptima | Spain | Mobile App as an electronic notebook to record field activities, products applied, workers implied, working time or machinery usage. Data can be downloaded on Excel, and safely stored in the cloud. [In Spanish] |
| AgroSense | Corizon | Netherlands and Spain | Open source. Work done, fields data, and timetables can be shared with contractors or employees. Automate importing and interpreting performed tasks via ISOBUS. Export in several formats. |
| AgVerdict | AgVerdict (Wilbur-Ellis) | California, USA | Desktop and mobile app. Enables data delivery to regulatory agencies or packers, shippers, and processors. Data security, decision making, VRA 1 possibility, soil analysis and crop recommendations. |
| Akkerweb | (Several providers) | The Netherlands | Independent consulting platform for organizing field and crop rotation plans. Information in one central geo-platform. Several applications. [In Dutch] |
| APEX TM JDLink | John Deere | Illinois, USA | Online tools enabling access to farm, machines, and agronomic data. Allows collaborative decisions from the same set of information to optimize logistics, plans and direct in-field work. |
| CASE IH AFS software | CASE IH | Wisconsin, USA | Single, integrated software package. View, edit, manage, analyze and utilize precision farming data to generate yield or VR 1 prescription maps. Maps and reports can be shared in different formats. |
| Connected Farm | Trimble Agriculture | California, USA | Input, access, share records (images, reports) in real time. Integrates the whole system: crop scouting, grid sampling, fleet management, contracts. Farm Core connects all aspects of farm operation. |
| Cropio | New Science Technologies | New York, USA | Productivity management system. Remote monitoring of land. Real time updates on current field and crop conditions; harvest forecasting. Web-based service and mobile app. Training provided. |
| Cropwin Vintel | itk | France | Customizable tool for integrated crop management. Observation, analysis, and optimization. Vintel: Decision support tool for vineyards. Tracks water status, cover crop and nutrient management. |
| The Phytech Platform | PHYTECH | Israel | Plant-based app for irrigation. Monitors and provides data on crop growth. All data can be used to determine overall water needs. |
| ESE™ Agri solution | Source Trace | Massachusetts USA | Thought to manage group of farms and farmers. Unified and up-to-date farmer database. Record field visits with photos, notes, activities, location. Farm-to-Fork traceability of produce. Unique ID for each farmer. |
| Farmbrite | Farmbrite | Colorado, USA | Farm schedule at-a-glance or in detail. The schedule can be shared to set up daily or recurring tasks. Weather forecast available. To-Do list, reminders, events, and appointments. |
| FarmCommand | FarmersEdge | Manitoba, Canada | Farm management platform. Provides both hardware (i.e., weather station) and software for in-field decision support. Available as a web-based tool and a mobile app. |
| Farmleap | Farmleap | France | Comparison of field performance locally and nationally. Reports time spent by operation type, yield analysis, production costs, irrigation follow-up, detailed weather, data sharing, employee management (In French). |
| FarmLogic/FarmPAD | TapLogic | Kentucky, USA | Web-based ag record-keeping. Global Positioning System (GPS) field mapping to draw boundaries, mark points, measurements, etc.; personalized reports for distribution, pesticide database, maintenance records, and work orders creation. |
| Farm Management Pro | Smart farm software | Ireland | Mobile app for farm records, costs and expenditure accounting, tractor management, crop management, fertilizer and spray compliance, staff timesheets, document management. No desktop version available. |
| Farmplan (Gatekeeper) | Proagrica | United Kingdom | For crops (Gatekeeper), livestock, and business. Exchange data, workplans setup, weather data, data storage, instantaneous reports, pesticide information. Several upgrades. Compatibility with other brands. |
| FieldViewTM | The Climate Corporation | California, USA | Data connectivity and visualization, crop performance analysis, field health imagery. Offers VR 1 prescriptions and fertility management based on models. |
| Granular | DowDuPont | California, USA | Different software according to necessities. Combination from several sources to build decision-making models. Advisory and training services. Support for more than 230 crop subspecies. Cloud-based. |
| KSAS | Kubota | Japan | Cloud-based agricultural management support service integrated by Kubota machinery. For smartphones and PC. Farm management by collecting and utilizing data from supported machinery. |
| Mapgrower | Agropreciso | Chile | Company-oriented platform that allows automated planning, work management, traceability, online statistics, account management, or visualization on maps. Available for smartphones. |
| Myeasyfarm | MyEasyFarm | France | Allows to define fields and their operations, plan season work and share it with a team, see real-time progress, and analyze results. |
| My Farm Manager | Decisive Farming | Alberta, Canada | Mobile devices. Packages available for VRA 1, agronomy and soil testing. Advice from experts. Marketing plans. Inventory and scheduled task in Croptivity application. |
| Phoenix | Agdata | Queensland Australia | It is modular so farmers can build their solution. Available in the cloud or desktop. Training provided. Farmers can create maps (.shp, gpx, pdf, bmp, and jpg formats), add data, and update them. |
| PLM Connect | New Holland | Italy | Enables connection with field machinery. Map and analysis of crop/soil data, yield performance, VR 1 prescription, inventory and accounting records on supplies, seeds, chemicals, and fertilizer. |
| SST software | Proagrica | United Kingdom | Collect and manage data in the field. Statistical analysis reports, decision-making tools. PaaS 2 (agX® Platform) for the ag industry providing geospatial infrastructure. |
| SMS | AgLeader | Iowa, USA | Soil sampling, grids and regions. Seed with higher yield potential can be chosen based on historic performance, reports, record operations, VRA 1 maps, and prescriptions. Mobile app available. |
| SpiderWeb GIS | Agrisat Iberia | Spain | Allows consultation, management and analysis. Satellite images and other spatial reference layers. Data corresponding to each pixel can be downloaded in the form of temporary tables and graphs. |
| Telematics | Claas | Germany | Collects important operational data for a self-propelled harvester and transfers it to a web platform. Unlimited access with Internet connection. |
| TAP TM | Topcon | Japan | Topcon and other companies’ equipment compatible. Traceability and connectivity. Data management for farmers, data analysis for agronomists, multi-user data management, cloud-based data management. |
| Visual Green | Visual NaCert | Spain | Web platform to store farmers’ data. GreenStar and MyJohnDeere compatibility, costs control, agroclimate data, official field notebook (compulsory in Spain), authorized products. |
| WinGIS | ProGIS Software | Austria | GIS: raster/vector maps, krigging, import/export in DXF or shp, fast Sentinel images. With its own development environment (SDK) allowing programmers to link their database apps to maps. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saiz-Rubio, V.; Rovira-Más, F. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy 2020, 10, 207. https://doi.org/10.3390/agronomy10020207
Saiz-Rubio V, Rovira-Más F. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy. 2020; 10(2):207. https://doi.org/10.3390/agronomy10020207
Chicago/Turabian StyleSaiz-Rubio, Verónica, and Francisco Rovira-Más. 2020. "From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management" Agronomy 10, no. 2: 207. https://doi.org/10.3390/agronomy10020207
APA StyleSaiz-Rubio, V., & Rovira-Más, F. (2020). From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy, 10(2), 207. https://doi.org/10.3390/agronomy10020207