
Estimation of Potato Chlorophyll Content from UAV Multispectral Images with Stacking Ensemble Algorithm


 ,
,
Abstract
1. Introduction
2. Materials
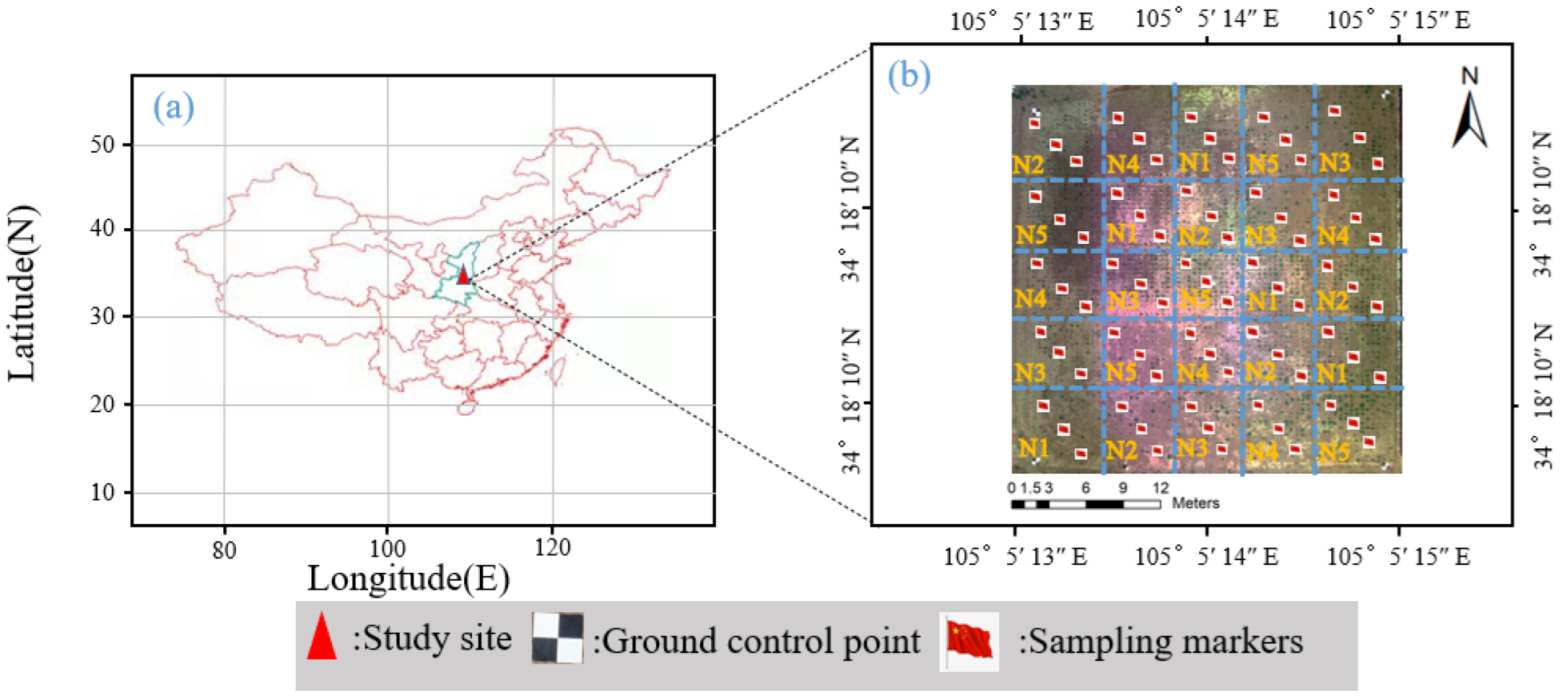
2.1. Study Site and Management
2.2. Data Collection
2.2.1. Measurement of Potato Chlorophyll Content
2.2.2. Acquisition and Pretreatment of UAV Multispectral Images
3. Methodology
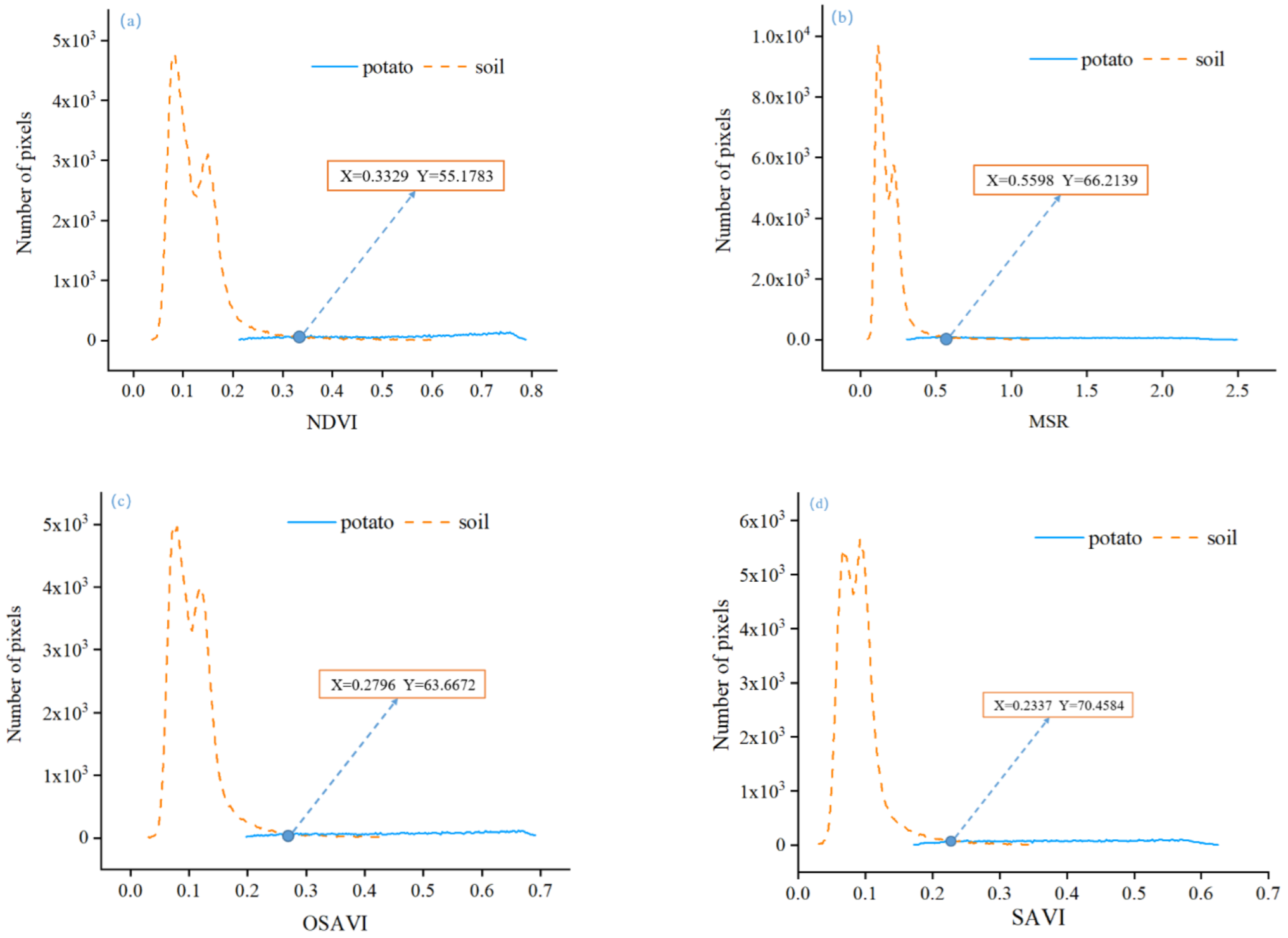
3.1. Estimation of FVC with the Combination of SVM and GMM Thresholding Method
3.2. The Calculation of Vegetation Indices and Texture Features
3.3. RFE Feature Selection
3.4. Fusion of VIs and Texture Features Based on Principal Component Analysis
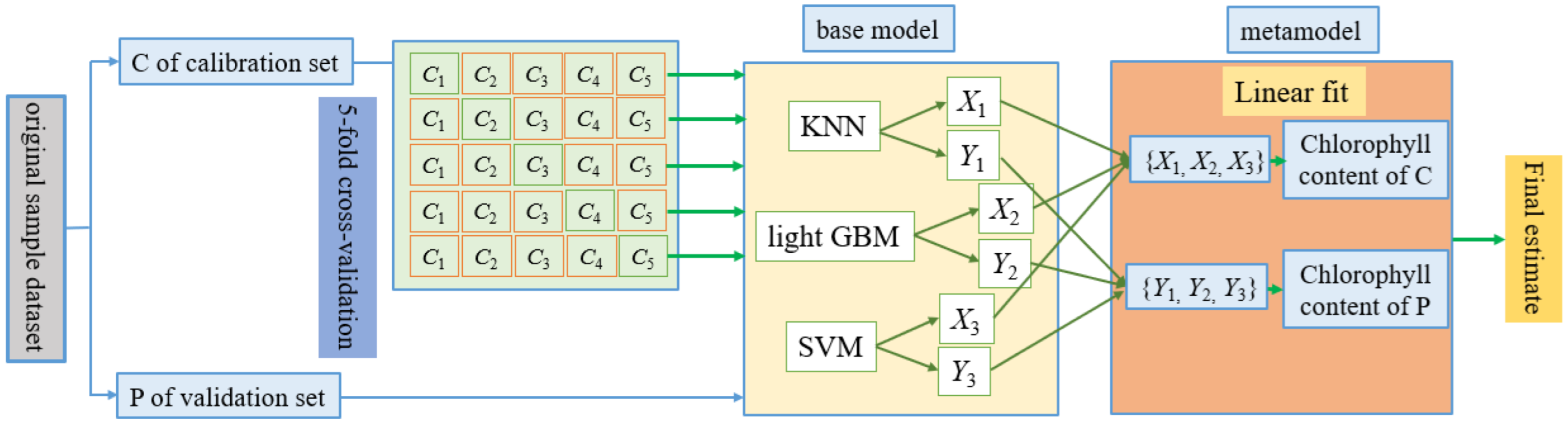
3.5. Estimation of the Chlorophyll Contents Using Machine-Learning Techniques
3.6. Statistical Analysis
4. Results
4.1. The Estimation Results of FVC for Potato Plants
4.2. Response of Leaf Chlorophyll Content to N Application Rate in Potato Plants
4.3. The Results of Feature Selection
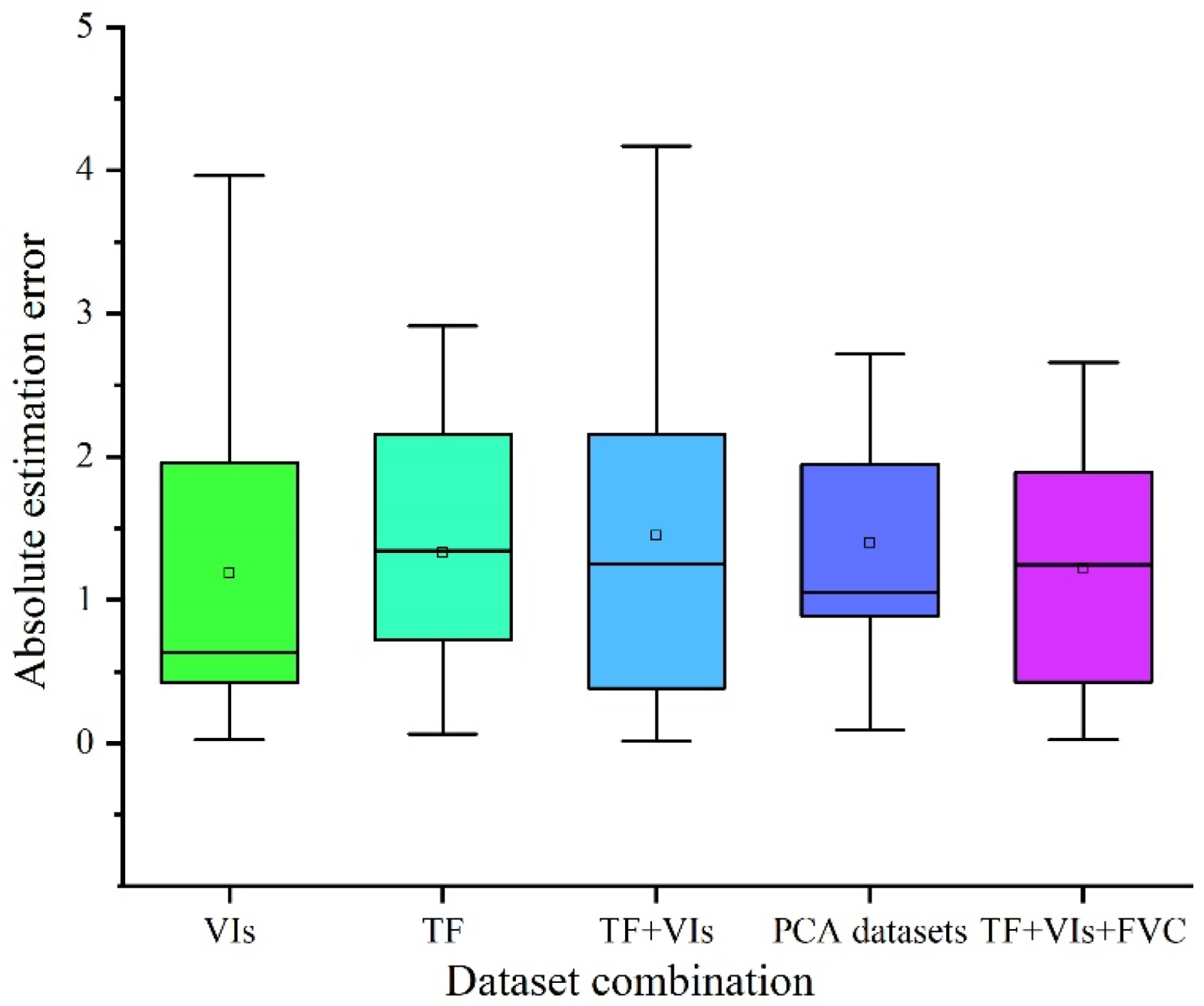
4.4. Performance of Different Chlorophyll Content Regression Models
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, H.; Fen, X.; Yu, W.; Hu, H.; Dai, X. Progress of potato staple food research and industry development in China. J. Integr. Agric. 2017, 16, 2924–2932. [Google Scholar] [CrossRef]
- Jia, J.; Yang, D.; Li, J.; Yang, L. Research and Comparative Analysis about Potato Production Situation between China and Continents in the World. Agric. Eng. 2011, 1, 84–86. [Google Scholar]
- Wang, L.; Chen, S.; Peng, Z.; Huang, J.; Wang, C.; Jiang, H.; Zheng, Q.; Li, D. Phenology Effects on Physically Based Estimation of Paddy Rice Canopy Traits from UAV Hyperspectral Imagery. Remote Sens. 2021, 13, 1792. [Google Scholar] [CrossRef]
- Ye, H.; Huang, W.; Huang, S.; Cui, B.; Jin, Y. Recognition of Banana Fusarium Wilt Based on UAV Remote Sensing. Remote Sens. 2020, 12, 938. [Google Scholar] [CrossRef]
- Gu, O.Y.; Wang, H.; Wu, Z.; Wang, S.; Fu, Y. Modified Red Blue Vegetation Index for Chlorophyll Estimation and Yield Prediction of Maize from Visible Images Captured by UAV. Sensors 2020, 20, 5055. [Google Scholar] [CrossRef]
- Rigon, J.P.G.; Capuani, S.; Fernandes, D.M.; Guimarães, T.M. A novel method for the estimation of soybean chlorophyll content using a smartphone and image analysis. Photosynthetica 2016, 54, 559–566. [Google Scholar] [CrossRef]
- Fernandes, F.M.; Soratto, R.P.; Fernandes, A.M.; Souza, E. Chlorophyll meter–based leaf nitrogen status to manage nitrogen in tropical potato production. Agron. J. 2021, 113, 1733–1746. [Google Scholar] [CrossRef]
- Widjaja Putra, B.T.; Soni, P. Enhanced broadband greenness in assessing Chlorophyll a and b, Carotenoid, and Nitrogen in Robusta coffee plantations using a digital camera. Precis. Agric. 2018, 19, 238–256. [Google Scholar] [CrossRef]
- Gupta, S.D.; Pattanayak, A.K. Intelligent image analysis (IIA) using artificial neural network (ANN) for non-invasive estimation of chlorophyll content in micropropagated plants of potato. In Vitro Cell. Dev. Biol. Plant 2017, 53, 520–526. [Google Scholar] [CrossRef]
- Sims, D.A.; Gamon, J.A. Relationships between leaf pigment content and spectral reflectance across a wide range of species, leaf structures and developmental stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Blackburn, G.A. Quantifying Chlorophylls and Caroteniods at Leaf and Canopy Scales: An Evaluation of Some Hyperspectral Approaches. Remote Sens. Environ. 1998, 66, 273–285. [Google Scholar] [CrossRef]
- Yin, H.; Li, F.; Yang, H.; Li, Y. Estimation of canopy chlorophyll in potato based on UAV hyperspectral images. J. Plant Nutr. Fertil. 2021, 27, 2184–2195. [Google Scholar]
- Li, C.; Chen, P.; Ma, C.; Feng, H.; Wei, F.; Wang, Y.; Shi, J.; Cui, Y. Estimation of potato chlorophyll content using composite hyperspectral index parameters collected by an unmanned aerial vehicle. Int. J. Remote Sens. 2020, 41, 8176–8197. [Google Scholar] [CrossRef]
- Zhuo, W.; Wu, N.; Shi, R.; Wang, Z. UAV Mapping of the Chlorophyll Content in a Tidal Flat Wetland Using a Combination of Spectral and Frequency Indices. Remote Sens. 2022, 14, 827. [Google Scholar] [CrossRef]
- Shu, M.; Zuo, J.; Shen, M.; Yin, P.; Wang, M.; Yang, X.; Tang, J.; Li, B.; Ma, Y. Improving the estimation accuracy of SPAD values for maize leaves by removing UAV hyperspectral image backgrounds. Int. J. Remote Sens. 2021, 42, 5862–5881. [Google Scholar] [CrossRef]
- Guo, Y.; Yin, G.; Sun, H.; Wang, H.; Chen, S.; Senthilnath, J.; Wang, J.; Fu, Y. Scaling effects on chlorophyll content estimations with RGB camera mounted on a UAV platform using machine-learning methods. Sensors 2020, 20, 5130. [Google Scholar] [CrossRef]
- Jay, S.; Baret, F.; Dutartre, D.; Malatesta, G.; Héno, S.; Comar, A.; Weiss, M.; Maupas, F. Exploiting the centimeter resolution of UAV multispectral imagery to improve remote-sensing estimates of canopy structure and biochemistry in sugar beet crops. Remote Sens. Environ. 2018, 231, 110898. [Google Scholar] [CrossRef]
- Mao, Z.; Deng, L.; Sun, J.; Zhang, A.; Chen, X.; Zhao, Y. Research on the application of UAV multispectral remote sensing in the maize chlorophyll prediction. Spectrosc. Spectr. Anal. 2018, 38, 2923–2931. [Google Scholar]
- Singhal, G.; Bansod, B.S.; Mathew, L.; Goswami, J.; Raju, P. Comparison of Parametric and Non-Parametric Methods for Chlorophyll Estimation based on High Resolution UAV Imagery. Curr. Sci. 2019, 117, 1874–1879. [Google Scholar] [CrossRef]
- Yue, J.; Feng, H.; Tian, Q.; Zhou, C. A robust spectral angle index for remotely assessing soybean canopy chlorophyll content in different growing stages. Plant Methods 2020, 16, 104. [Google Scholar] [CrossRef]
- Chen, P.; Feng, H.; Li, C.; Yang, G.; Yang, J.; Yang, W.; Liu, S. Estimation of chlorophyll content in potato using fusion of texture and spectral features derived from UAV multispectral image. Trans. Chin. Soc. Agric. Eng. 2019, 35, 63–74. [Google Scholar]
- Purevdorj, T.; Tateishi, R.; Ishiyama, T.; Honda, Y. Relationships between percent vegetation cover and vegetation indices. Int. J. Remote Sens. 1998, 19, 3519–3535. [Google Scholar] [CrossRef]
- Niu, Y.; Han, W.; Zhang, H.; Zhang, L.; Chen, H. Estimating fractional vegetation cover of maize under water stress from UAV multispectral imagery using machine learning algorithms. Comput. Electron. Agric. 2021, 189, 106414. [Google Scholar] [CrossRef]
- Zhang, D.; Mansaray, L.R.; Jin, H.; Han, S.; Kuang, Z.; Huang, J. A universal estimation model of fractional vegetation cover for different crops based on time series digital photographs. Comput. Electron. Agric. 2018, 151, 93–103. [Google Scholar] [CrossRef]
- Qiao, L.; Tang, W.; Gao, D.; Zhao, R.; Song, D. UAV-based chlorophyll content estimation by evaluating vegetation index responses under different crop coverages. Comput. Electron. Agric. 2022, 196, 106775. [Google Scholar] [CrossRef]
- Tang, X.G.; Song, K.S.; Liu, D.W.; Wang, Z.M.; Wang, Y.D. Comparison of Methods for Estimating Soybean Chlorophyll Content Based on Visual/Near Infrared Reflection Spectra. Spectrosc. Spectr. Anal. 2011, 31, 371–374. [Google Scholar]
- Zhang, S.; Zhao, G.; Lang, K.; Su, B.; Zhang, H. Integrated Satellite, Unmanned Aerial Vehicle (UAV) and Ground Inversion of the SPAD of Winter Wheat in the Reviving Stage. Sensors 2019, 19, 1485. [Google Scholar] [CrossRef]
- Li, G.; Han, W.; Huang, S.; Ma, W.; Ma, Q.; Cui, X. Extraction of Sunflower Lodging Information Based on UAV Multi-Spectral Remote Sensing and Deep Learning. Remote Sens. 2021, 13, 2721. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB Estimation in a Tropical Mountain Forest (TMF) by Means of RGB and Multispectral Images Using an Unmanned Aerial Vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef]
- Li, F.; Miao, Y.; Feng, G.; Yuan, F.; Yue, S.; Gao, X.; Liu, Y.; Liu, B.; Ustin, S.L.; Chen, X. Improving estimation of summer maize nitrogen status with red edge-based spectral vegetation indices. Field Crops Res. 2014, 157, 111–123. [Google Scholar] [CrossRef]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Wan, L.; Cen, H.; Zhu, J.; Li, Y.; Zhu, Y.; Li, Y.; Zhu, Y.; Sun, D.; Weng, H.; He, Y. Combining UAV-based vegetation indices, canopy height and canopy coverage to improve rice yield prediction under different nitrogen levels. In Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019. [Google Scholar]
- Chen, J.M. Evaluation of Vegetation Indices and a Modified Simple Ratio for Boreal Applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- He, Y.; Peng, J.; Liu, F.; Zhang, C.; Kong, W. Critical review of fast detection of crop nutrient and physiological information with spectral and imaging technology. Trans. Chin. Soc. Agric. Eng. 2015, 31, 174–189. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Gomes, L.C.; Faria, R.M.; De Souza, E.; Veloso, G.V.; Schaefer, C.E.G.R.; Filho, E.I.F. Modelling and mapping soil organic carbon stocks in Brazil. Geoderma 2019, 340, 337–350. [Google Scholar] [CrossRef]
- Stamate, D.; Katrinecz, A.; Stahl, D.; Verhagen, S.; Guloksuz, S. Identifying psychosis spectrum disorder from experience sampling data using machine learning approaches. Schizophr. Res. 2019, 209, 156–163. [Google Scholar] [CrossRef]
- Pue, J.D.; Botula, Y.D.; Nguyen, P.M.; Meirvenne, M.V.; Cornelis, W.M. Introducing a Kriging-based Gaussian Process approach in pedotransfer functions: Evaluation for the prediction of soil water retention with temperate and tropical datasets. J. Hydrol. 2020, 597, 125770. [Google Scholar] [CrossRef]
- Chami, S.; Tavakolian, K. In Comparative Study of Light-GBM and LSTM for Early Prediction of Sepsis from Clinical Data. In Proceedings of the 2019 Computing in Cardiology Conference, Singapore, 8–11 September 2019. [Google Scholar]
- Wang, C.; Wang, S.; He, X.; Wu, L.; Guo, J. Combination of spectra and texture data of hyperspectral imaging for prediction and visualization of palmitic acid and oleic acid contents in lamb meat. Meat Sci. 2020, 169, 108194. [Google Scholar] [CrossRef]
- Sun, Q.; Gu, X.; Chen, L.; Xu, X.; Wei, Z.; Pan, Y.; Gao, Y. Monitoring maize canopy chlorophyll density under lodging stress based on UAV hyperspectral imagery. Comput. Electron. Agric. 2022, 193, 106671. [Google Scholar] [CrossRef]
- Qiao, L.; Gao, D.; Zhang, J.; Li, M.; Sun, H.; Ma, J. Dynamic influence elimination and chlorophyll content diagnosis of maize using UAV spectral imagery. Remote Sens. 2020, 12, 2650. [Google Scholar] [CrossRef]
- Zhao, M.; Jha, A.; Liu, Q.; Millis, B.A.; Mahadevan-Jansen, A.; Lu, L.; Landman, B.A.; Tyska, M.J.; Huo, Y. Faster Mean-shift: GPU-accelerated clustering for cosine embedding-based cell segmentation and tracking. Med. Image Anal. 2021, 71, 102048. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Liu, Q.; Jha, A.; Deng, R.; Yao, T.; Mahadevan-Jansen, A.; Tyska, M.J.; Millis, B.A.; Huo, Y. In VoxelEmbed: 3D instance segmentation and tracking with voxel embedding based deep learning. In International Workshop on Machine Learning in Medical Imaging; Springer: Berlin/Heidelberg, Germany, 2021; pp. 437–446. [Google Scholar]
- Guijarro, M.; Pajares, G.; Riomoros, I.; Herrera, P.; Burgos-Artizzu, X.; Ribeiro, A. Automatic segmentation of relevant textures in agricultural images. Comput. Electron. Agric. 2011, 75, 75–83. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Yang, H.; Lan, Y.; Lu, L.; Gong, D.; Miao, J.; Zhao, J. New method for cotton fractional vegetation cover extraction based on UAV RGB images. Int. J. Agric. Biol. Eng. 2022, 15, 172–180. [Google Scholar] [CrossRef]
- Padilla, F.M.; Gallardo, M.; Peña-Fleitas, M.T.; De Souza, R.; Thompson, R.B. Proximal optical sensors for nitrogen management of vegetable crops: A review. Sensors 2018, 18, 2083. [Google Scholar] [CrossRef] [PubMed]
- Padilla, F.M.; Peña-Fleitas, M.T.; Gallardo, M.; Giménez, C.; Thompson, R.B. Derivation of sufficiency values of a chlorophyll meter to estimate cucumber nitrogen status and yield. Comput. Electron. Agric. 2017, 141, 54–64. [Google Scholar] [CrossRef]
- Zhao, B.; Ata-Ul-Karim, S.T.; Liu, Z.; Zhang, J.; Xiao, J.; Liu, Z.; Qin, A.; Ning, D.; Yang, Q.; Zhang, Y. Simple assessment of nitrogen nutrition index in summer maize by using chlorophyll meter readings. Front. Plant Sci. 2018, 9, 11. [Google Scholar] [CrossRef]
- Li, R.; Chen, J.; Qin, Y.; Fan, M. Possibility of using a SPAD chlorophyll meter to establish a normalized threshold index of nitrogen status in different potato cultivars. J. Plant Nutr. 2019, 42, 834–841. [Google Scholar] [CrossRef]
- Kanning, M.; Kühling, I.; Trautz, D.; Jarmer, T. High-resolution UAV-based hyperspectral imagery for LAI and chlorophyll estimations from wheat for yield prediction. Remote Sens. 2018, 10, 2000. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | Camera | ||
|---|---|---|---|
| Parameters | Values | Parameters | Values |
| Product type | Quadcopter | Color output | Global shutter and all spectral bands aligned |
| Longest flight time/min | 27 | Focal length/mm | 5.5 |
| Maximum takeoff weight/kg | 6.140 | Field of view/(°) | 47.2 |
| Operating temperature/°C | −20–45 | Pixels | 1280 × 960 |
| Digital communication distance/km | 7 | Wavelength/mm | 400–900 |
| Maximum withstand wind speed (m/s) | 12 | Capture rate (time/s) | 1 |
| Nomenclature | Definition |
|---|---|
| UAV | unmanned aerial vehicle |
| SVM | support vector machines |
| GMM | gaussian mixture model |
| FVC | fractional vegetation cover |
| VI | vegetation index |
| SAVI | soil-adjusted vegetation index |
| RFE | recursive feature elimination |
| MSR | modified simple ratio |
| RVI | ratio vegetation index |
| NDVI | normalized difference vegetation index |
| correlation-NIR | correlation in NIR band |
| corr-Red-edge | correlation in red-edge band |
| hom-NIR | homogeneity in NIR band |
| KNN | K-Nearest Neighbor |
| light-GBM | light gradient boosting machine |
| OSAVI | optimized soil-adjusted vegetation index |
| PCA | principal component analysis |
| ROI | region of interest |
| Vegetation Index | Typical Objects | Overall Accuracy (%) | Kappa Coefficient | Producer Accuracy (%) | User Accuracy (%) |
|---|---|---|---|---|---|
| MSR | Potato plants | 99.67 | 0.99 | 99.05 | 98.92 |
| soil | 99.79 | 99.82 | |||
| NDVI | Potato plants | 99.64 | 0.99 | 98.76 | 99.01 |
| soil | 99.81 | 99.76 | |||
| OSAVI | Potato plants | 99.78 | 0.99 | 99.38 | 99.28 |
| soil | 99.86 | 99.88 | |||
| SAVI | Potato plants | 99.81 | 0.99 | 99.65 | 99.20 |
| soil | 99.85 | 99.93 |
| Vegetation Index | Typical Objects | Overall Accuracy (%) | Kappa Coefficient | Producer Accuracy (%) | User Accuracy (%) |
|---|---|---|---|---|---|
| MSR | Potato plants | 99.34 | 0.98 | 99.88 | 97.70 |
| soil | 99.14 | 99.96 | |||
| NDVI | Potato plants | 99.32 | 0.98 | 99.91 | 97.63 |
| soil | 99.11 | 99.97 | |||
| OSAVI | Potato plants | 99.49 | 0.99 | 99.90 | 98.21 |
| soil | 99.33 | 99.96 | |||
| SAVI | Potato plants | 99.66 | 0.99 | 99.90 | 98.84 |
| soil | 99.57 | 99.96 |
| Regression Algorithms | VIs | Texture Features | VIs+Texture Features | PCA Datasets | VIs+Texture Features+FVC | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Evaluation Indicators | R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE | R2 | RMSE |
| KNN | 0.485 | 0.718 | 0.581 | 0.647 | 0.642 | 0.598 | 0.547 | 0.673 | 0.672 | 0.573 |
| light-GBM | 0.637 | 0.602 | 0.670 | 0.574 | 0.637 | 0.602 | 0.608 | 0.626 | 0.695 | 0.552 |
| SVM | 0.579 | 0.649 | 0.616 | 0.619 | 0.677 | 0.568 | 0.669 | 0.575 | 0.689 | 0.558 |
| Stacking | 0.672 | 0.573 | 0.587 | 0.642 | 0.694 | 0.553 | 0.627 | 0.611 | 0.739 | 0.511 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Hu, Y.; Zheng, Z.; Qiao, Y.; Zhang, K.; Guo, T.; Chen, J. Estimation of Potato Chlorophyll Content from UAV Multispectral Images with Stacking Ensemble Algorithm. Agronomy 2022, 12, 2318. https://doi.org/10.3390/agronomy12102318
Yang H, Hu Y, Zheng Z, Qiao Y, Zhang K, Guo T, Chen J. Estimation of Potato Chlorophyll Content from UAV Multispectral Images with Stacking Ensemble Algorithm. Agronomy. 2022; 12(10):2318. https://doi.org/10.3390/agronomy12102318
Chicago/Turabian StyleYang, Huanbo, Yaohua Hu, Zhouzhou Zheng, Yichen Qiao, Kaili Zhang, Taifeng Guo, and Jun Chen. 2022. "Estimation of Potato Chlorophyll Content from UAV Multispectral Images with Stacking Ensemble Algorithm" Agronomy 12, no. 10: 2318. https://doi.org/10.3390/agronomy12102318
APA StyleYang, H., Hu, Y., Zheng, Z., Qiao, Y., Zhang, K., Guo, T., & Chen, J. (2022). Estimation of Potato Chlorophyll Content from UAV Multispectral Images with Stacking Ensemble Algorithm. Agronomy, 12(10), 2318. https://doi.org/10.3390/agronomy12102318