Abstract
Agriculture consumes an important ratio of the water reserve in irrigated areas. The improvement of irrigation is becoming essential to reduce this high water consumption by adapting supplies to the crop needs and avoiding losses. This global issue has prompted many scientists to reflect on sustainable solutions using innovative technologies, namely Unmanned Aerial Vehicles (UAV), Machine Learning (ML), and the Internet of Things (IoT). This article aims to present an overview of the use of these new technologies in the analysis of the water status of crops for better irrigation management, with an emphasis on arboriculture. The review demonstrated the importance of UAV-ML-IoT technologies. This contribution is due to the relevant information that can be collected from IoT sensors and extracted from UAV images through various sensors (RGB, multispectral, hyperspectral, thermal), and the ability of ML models to monitor and predict water status. The review in this paper is organized into four main sections: the use of UAV in arboriculture, UAV for irrigation management in arboriculture, IoT systems and irrigation management, and ML for data processing and decision-making. A discussion is presented regarding the prospects for smart irrigation using geospatial technologies and machine learning.
1. Introduction
The last 60 years have seen remarkable developments in the use of water resources in agriculture in response to population growth and the increased demand for food. The world’s population has grown from 2.5 billion in 1950 to 7 billion today, the area under irrigation has doubled, and water withdrawals have tripled due to the massive development of water infrastructure [1]. In recent years, most countries in the world have suffered from water stress and drought. Due to the huge lack of precipitation and the high demand, water resources are decreasing dangerously, endangering the food security of many countries. The World Resources Institute has recognized Morocco as one of the countries most affected by water stress, such that by 2040 the level of water stress will reach 80%, which is too high for an agricultural country for which the agriculture consumes 73% of its water resources [2]. Improved irrigation scheduling—which involves determining the appropriate time to irrigate, the amount of water to apply, and the duration of the irrigation process to ensure a balance between water use and crop response [3]—is becoming essential to reduce the very high consumption by matching supplies to crop needs and avoiding losses. This problem at the global level has led many scientists to think about sustainable solutions to improve irrigation water consumption through innovative technologies, including Unmanned Aerial Vehicles (UAV), as well as two interesting concepts for more flexibility and automation, namely Artificial intelligence (AI) and Internet of Things (IoT) [4,5,6,7,8,9,10,11].
UAVs in agriculture are not only capable of filming to perform a visual field inspection to identify weeds or pest damage but also have the ability to be equipped with various sensors that facilitate the analysis of a complete dataset: nitrogen level, chlorophyll, biomass, and moisture, etc. Artificial intelligence, in this role, is a huge and constantly evolving field. The abilities to predict, estimate, and train decision-making systems make it a practical solution for complex phenomena such as irrigation scheduling. The focus is currently on Machine Learning (ML), which allows for the optimization of certain human activities through soil and crop monitoring, and predictive analysis. In order to feed these algorithms, the process consists in collecting data, thanks to soil mapping performed with UAV, or thanks to cameras and sensors planted in the ground or installed on tractors. Due to the development of wireless sensors (such as thermal sensors, moisture sensors, and light sensors) used in agriculture and the development of transmission technology, the concept of the Internet of Things has generated a lot of interest in data collection and irrigation automation.
The UAV-ML-IoT combination has allowed us to talk today about connected and smart agriculture. In this context, the objective of this article is to provide an overview of the progress made in the use of these three innovative technologies in irrigation management, with a focus on arboriculture. The review includes a survey of the published papers and existing solutions. Irrigation management is discussed in detail based on three major components: water requirement estimation and crop water status assessment, UAV and IoT for data collection, and ML for data processing and analysis. In addition, the benefits, challenges, and trends are discussed.
The article is organized as follows: In Section 2, a general overview of the use and applications of UAVs in arboriculture is given. Section 3 discusses the factors related to crop water status and their relationships with the different indices extracted from UAV images. Section 4 covers the potential and architecture of IoT systems in irrigation management by presenting a set of examples in order to arrive at a general structure, as well as looking at trends in combined UAV-IoT usage. Section 5 is dedicated to ML algorithms for data processing, focusing on the algorithms recently used to link the indices extracted from UAV images to the factors affecting the crop water status, and furthermore to the usefulness of dashboards and geographic information systems (GIS) in data visualization and decision support through examples. Section 6 examines the benefits, challenges, and trends in a discussion format. Section 7 concludes the paper.
2. Use of UAV in Arboriculture
The important distinction in the use of UAV is between the UAV itself (the platform) and the equipment carried (the payload). This is the purpose of the study, along with the characteristics of the area that dictate the type of sensors, the platform to be used, and the methodology to be adopted. The types of UAV used can be divided into three main categories: rotary-wing, fixed-wing, and VTOL (Vertical Take-off and Landing) (see Figure 1). For fixed-wing UAVs, the gravimetric lift is provided by the presence of one or more hard wings. The specific shape of the wings generates lift when the aircraft is subjected to relative wind. In addition, their takeoff requires an initial horizontal speed, such that it is necessary to initiate them to start their flight. Rotary-wing UAVs are a subset of rotorcraft. The term rotorcraft is used in aviation to define aircraft that use rotating wings to generate lift. Rotorcraft can have one or more rotors. UAVs using rotary systems are almost always equipped with several small rotors, which are necessary for their stability, hence the name “rotary-wing system”. Typically, these UAVs use at least four rotors to keep them in flight [12]. The VTOL UAVs were developed to combine the benefits of both rotary-wing and fixed-wing craft. A rotary-wing can perform vertical takeoff and landing, but its wing rotor cannot pass the velocity of sound [13]. The choice of a type depends on several important criteria, such as hovering and vertical takeoff, the difficulty of piloting, mechanical and electronic complexity, the cost and difficulty of repairs, and finally the flight distance and autonomy [12].

Figure 1.
(a) Fixed-wing Unmanned Aerial Vehicles (UAV) (Tuffwing Mapper) [14]; (b) rotary-wing UAV (quad-rotor Parrot Anaf) [15]; (c) VTOL UAV (Tron) [16].
Regarding sensors, the most commonly used examples for agricultural purposes are the following: hyperspectral, multispectral, RGB, and thermal sensors (see Figure 2). The hyperspectral imaging sensors are indeed able to capture more details in a large number of narrow and contiguous bands, which should be preferred when detecting the chemical and physical properties of the objects of study [17]. The multispectral imaging can capture both spectral and spatial data in a few spectral bands. The RGB imaging can provide spectral information in all three spectral bands of the visible spectrum. Thermal sensors measure the radiation emitted by the surface of an object and convert it into temperature [18].

Figure 2.
(a) Thermal camera (Flir vue pro) [19]; (b) multispactral camera (Parrot sequoia) [20]; (c) heperspctral camera (Rikola hyperspectral imager) [21]; (d) RGB camera (Sensfly S.O.D.A) [20].
The images from these sensors are then processed for analysis using photogrammetry techniques, which involves the precise reconstruction of a scene or object from several images, or through the calculation of vegetation indices (VI), which use different combinations or mathematical transformations of at least two spectral bands of the electromagnetic spectrum. They are designed to maximize the contribution of vegetation characteristics, and they can provide reliable spatial and temporal information about crops. The choice of the sensor, particularly for UAV applications in arboriculture and irrigation management, is more related to the choice of indices to be retrieved. RGB, multispectral, and hyperspectral sensors are commonly used to calculate canopy reflectance indices. The length and number of bands used to generate these indices favor one over the other. Thermal sensors are more suited for indices depending on the temperature of the leaves/canopy. More information on these indices will be provided in the sections that follow.
The diversity of platforms and sensors discussed above (See Figure 1 and Figure 2) has motivated many research groups to explore and adopt UAVs into their agricultural practices in order to meet specific needs [22,23,24,25,26]. UAVs have found applicability in a variety of agricultural study areas, one of which is arboriculture, where there is growing interest in this segment of technology, particularly because of the high-resolution data that can be collected flexibly in a short time and for a relatively low price. In addition, UAVs have an important role to play in filling the gaps in the data collected using manned aircraft (airplane, or helicopter) or satellite remote sensing, whilst having many advantages both in research and in various practical applications, especially in arboriculture, as well as in agriculture in general. Table 1 summarizes the main research works in the last decade dealing with the use of UAV in arboriculture for various purposes. All of the indices used in the cited works are mentioned in Table 2, according to the type of sensor operated.

Table 1.
Examples of studies addressing the use of UAV in arboriculture.
Table 2.
Calculated indices in each study according to sensor type.
The analysis of all of the studies cited in Table 1 shows a description of the state of the art of UAVs’ applications in arboriculture. It proves that UAVs are increasingly being adopted in agricultural practices, particularly in arboriculture. The adoption of this technology has contributed significantly to the treatment of several problems, which have targeted several types of fruit trees (citrus, sweet cherry, almond, peach, pomegranate) and have been conducted in different regions in America, Asia, and Europe (USA, China, Spain, Italy, Brazil, and Turkey, etc.), related to different aspects:
- The detection of plant diseases and their physiological problems [22,24,26].Traditional methods of detecting disease and stress in many crops rely on human screening, which is time-consuming, expensive, and in some cases impractical or prone to human error. The analysis of vegetation indices (see Table 2), from low-altitude, high-resolution aerial imagery taken by UAV, can potentially be used for stress detection in different crops. It can also help in the detection of new diseases at an early stage that cannot be detected by human scouts. The principle is based on the fact that leaves reflect a lot of light in the near-infrared (IR) range. When the plant becomes dehydrated or stressed, the leaves reflect less IR light, but the same amount in the visible range. As such, the mathematical combination of these two signals can help differentiate a plant from a non-plant, or a healthy plant from a diseased plant [34]. The early detection of disease could be a major application of pilotless systems.
- The counting, height, and classification of trees [23,25,35].UAV RGB, multispectral and hyperspectral imagery helps to create index maps, which can differentiate the ground from grass or forest, and can detect plants. It can also perform the construction of digital surface models and digital terrain models (DTM) through these images. They will allow us to obtain information on the height of the trees by obtaining the model of the height of the canopy by applyingCHM = DSM − DTM
- Yield monitoring [35].There are strong correlations between the crop yield and vegetation indices measured at certain stages of the crop. Therefore, monitoring crop growth at key stages will help us to provide an accurate estimate of the crop yield, and help to solve problems that hinder normal crop growth (water stress, diseases, physiological problems, etc.) quickly.
- Tree risk assessment/management [23].The integration of UAV imagery can greatly enhance a decision-making system (DMS) aimed at managing tree risk, especially in extensive settings. The DMS is indeed called upon to identify the most critical situations, allowing the optimization of ground surveys. Information from UAV images and existing maps can be considered as the main inputs. A tree risk index (TRI) map is the expected outcome. A tree risk index (TRI) can be obtained using the QTRA (Quantified Tree Risk Assessment) method, which uses tree risk components reported from the best practices defined by the International Society of Arboriculture—Quebec [36]. Tree risk is made up of the probability of failure (stability index), potential impact, and target exposure. The system quantifies the independent probabilities of the three components, calculating their product for comparison with a generally accepted level of risk.
- Irrigation management and crop water status [4,5,6].This aspect will be analyzed in detail in the next section.
This wealth of applications in arboriculture confirms that UAVs are indispensable in modern agriculture. While the potential for UAV use is significant, there are still several notable barriers to their advancement, such as the cost of acquisition and the quality of the data captured. Data quality is crucial, and should be the priority for UAV use decisions and other aspects, such as the speed and flexibility of a UAV. Finally, the widespread adoption of new technologies is forcing farmers to adapt and modernize their production practices to obtain the best returns on these investments.
3. UAV for Irrigation Management in Arboriculture
Irrigation management involves the determination of the proper time to irrigate and the amount of water to apply, as successful irrigation depends on a delicate balance between water application and crop response [3]. The water supply must be accurately calculated as well, in an attempt to match the water demand with any amount.
The operation of defining the irrigation schedule and the amount of water to be applied is based mainly on the spatial and temporal monitoring of the water status of crops. Currently, the use of imagery acquired by UAV represents one of the most common methods used. The vast majority of methods based on UAV-acquired imagery and dealing with water status monitoring attempt to train models by transforming the information contained in the imagery into a variable that is highly correlated with well-established ground measurements. The main measurements discussed in the literature (see Table 3) are evapotranspiration [5], water potential, and stomatal conductance [4,7,8,37,38,39]. In addition to these measurements, the contribution of other factors should be considered—such as the local weather patterns, soil types, estimated root depth, and irrigation method [3]—in order to arrive at models with a correlation coefficient (R2) close to 1.
- Evapotranspiration.The term “evapotranspiration” was coined to represent the combination of the two phenomena of evaporation and transpiration. The evaporation is the phenomenon of water changing from a liquid state to a vapor state. The evaporation of a water surface, a pond or a lake, or the surface of soil are examples. Transpiration is the phenomenon of evaporation of water by trees through stomata [40].The water requirement of a tree is the amount of water needed to make a tree mature. A tree requires between 400 and 1000 kg of water to produce one kg of dry matter [40]. These water requirements and the actual evapotranspiration are identical under standard conditions [3]. The actual evapotranspiration of a crop is calculated as follows [41]:where is the single-crop coefficient, is the actual crop evapotranspiration, and is the reference evapotranspiration, i.e., the evapotranspiration of an ideal plant stand with water available at will.
- Leaf water potential and stomatal resistance.Leaf water potential and stomatal resistance are important traits that influence tree–water relationships. They in turn depend on the relative fluxes of water through the tree in the soil-tree-atmosphere environment [42]. The two gradients can be defined as follows:
- The water potential (Ψ) represents the potential of water to leave a given compartment. In plant physiology, it is used to determine the direction of the water exchange between different parts of the tree (organs, cells …), and between the tree and its environment (soil and atmosphere). It is the physiologically relevant integrator of the drought effects of plant tissues [43].
- The stomatal conductance (g) is the measure of the rate of passage of carbon dioxide into or out of water vapor through leaf stomata.
The indices derived from the UAV images represent the second input of the models (see Table 3). These indices are classified into two categories: the reflectance indices and the indices based on the leaf/canopy temperature.
3.1. Reflectance Indices
The reflectance indices processed are in the form of two categories:
- Vegetation indices (NDVI, NDRE, SR, OSAVI …) [4,5,7,39].Generally, these are related to tree structural traits and vegetation characteristics. They can provide reliable spatial and temporal information about crops. These indices showed a clear correlation with variables such as crop factor, stomatal conductance, and water potential in most of the studied crops (see Table 3).
- Photochemical reflectance index and the normalized photochemical reflectance index (PRI and ) [39,44,45,46].PRI is an index that takes into account changes in xanthophyll concentration due to water stress. The is an improvement of the PRI index over water potential and stomatal conductance; it not only takes into account changes in xanthophyll concentration due to water stress (PRI) but also generates a normalization considering the chlorophyll content, sensitivity to chlorophyll, and stress-induced reduction in the canopy leaf area [46]. The showed an improved ability to detect water stress compared to other greenness and structure indices [46].
3.2. Indices Based on Leaf/Canopy Temperature
The extraction of the temperature of the leaves/canopy, through thermal sensors, can have an observable effect on the estimation of the water status of crops, especially in arboriculture. This effect has been observed through several studies that have collected thermal indices for different crops, such as peach, vineyard, olive, and almond, etc. On the other hand, the Crop Water Stress Index (CWSI) represents the most widely used index. Following Idso et al., 1981 [33], the CWSI ranges from 0 to 1 (values close to 1 are related to high stress levels). This index showed better agreement with Ψ and g on most of the studied fruit trees (see Table 3) [8,47,48].
where is the surface temperature of the canopy and reference surfaces, and and are completely wet or dry in order to simulate the maximum and minimum leaf transpiration under the exposed environmental conditions.
Table 3.
Examples of studies addressing water status monitoring using UAV imagery in arboriculture.
Table 3.
Examples of studies addressing water status monitoring using UAV imagery in arboriculture.
| Reference | Type of Crop | Model Inputs | Results | |
|---|---|---|---|---|
| [5] | Pomegranate | NDVI | Kc | R2 = 0.999 |
| [7] | Vineyard | IVs combinés | Ψ | R2 = 0.83 |
| [4] | Sweet cherry | NDVI | Ψ | R2 = 0.60 |
| [49] | Almond | NDVI | Ψ | R2 = 0.7 |
| [39] | Peach | NDVI | Ψ | R2 = 0.72 |
| Peach | Ψ | R2 = 0.88 | ||
| Apricot | TCARI/OSAVI | Ψ | R2 = 0.88 | |
| TCARI/OSAVI | G | R2 = 0.77 | ||
| Almond | TCARI/OSAVI | G | R2 = 0.65 | |
| PRI | Ψ | R2 = 0.53 | ||
| Orange | G | R2 = 0.62 | ||
| Peach | G | R2 = 0.93 | ||
| Ψ | R2 = 0.72 to 0.88 | |||
| [44] | Olive | PRI | Ψ | R2 = 0.84 |
| [8] | Peach | CWSI | Ψ | R2 = 0.72 |
| Peach | CWSI | G | R2 = 0.82 | |
| [47] | Vineyard | CWSI | Ψ | R2 = 0.69 |
| Vineyard | CWSI | G | R2 = 0.70 | |
| [48] | Olive | CWSI | Ψ | R2 = 0.60 |
| Olive | CWSI | G | R2 = 0.91 | |
The indices presented in Table 3, in general, provide valuable information, but they require further processing to quantify the information to be managed. The digital mapping information on the crop water status allows spatial and temporal statistics to be calculated and stress levels for each crop to be determined, allowing the assessment of the average stress values and average water requirements. This is particularly important for the management of irrigation systems.
4. IoT Systems and Irrigation Management
The common definition of the IoT is defined as follows: the Internet of Things is a network of physical objects interconnected via the Internet. A unique identifier connects the objects so that the data can be transferred. The basic goal of an IoT system can be divided into four sections: the identification, detection, processing, and transmission of information. The key technologies in each section are, respectively, radio frequency identification (RFID), sensors, a smart chip, and a wireless telecommunications network. The design of IoT systems varies from system to system based on the intended application of the system, and the level of efficiency and security to be achieved. The most basic architecture is a three-layer architecture:
- The perception layer: this layer gives each object a physical meaning. It consists of data sensors in various forms, infrared (IR) sensors, or other sensor networks (temperature, humidity, etc.). This layer collects useful information about objects on devices and converts them into digital signals that are then transmitted to the network layer for further action.
- The network layer: the purpose of this layer is to receive useful information in the form of digital signals from the perception layer, and to transmit it to the processing systems through transmission technologies such as WiFi, Bluetooth, WiMaX, Zigbee, GSM, and 3G, etc., with protocols like MQTT, IPv4, IPv6, and DDS, etc.
- The application layer: this layer is responsible for the IoT application for all types of fields according to the processed data [50].
4.1. Architecture of IoT-Based Irrigation Systems
Presently, IoT is becoming established as a new industrial revolution in all sectors of agricultural activity, especially in irrigation management, while remote monitoring systems have been proposed to manage irrigation in an optimized way by applying the right dose at the right place at the right time. In this paragraph, we present examples of systems with the proposed composition [51,52,53,54,55,56] (see Table 4) that will provide a comprehensive view of smart irrigation management systems based on IoT technology, and will arrive at a generalized structure of its systems.
Table 4.
Examples of irrigation management systems based on Internet of Things (IoT) technology.
Analyzing the different examples cited in Table 4, generally, the architecture of irrigation systems based on IoT technology takes the structure detailed in Figure 3.
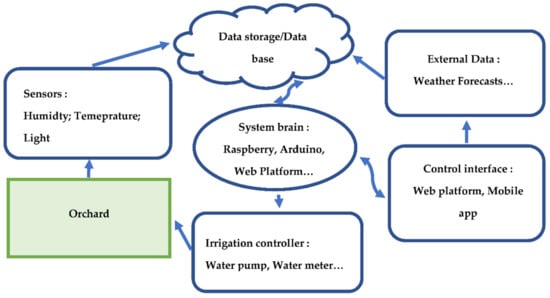
Figure 3.
Generalized structure of the architecture of IoT-based irrigation management systems.
An irrigation management IoT solution is based on three levels of components that include the sensors/actuators, the gateway, and Cloud computing:
- Sensors and actuators—all of the systems mentioned include sensors to collect data on physical quantities such as luminosity, temperature, and soil moisture. The actuators remain a complementary technology to the sensors; they convert electrical energy into motion or mechanical energy, which is used to control the water pump. A microcontroller (Arduino, in most systems) includes a processor, memory, input, and output devices on a single chip. The role of a microcontroller is to process the raw data captured by the sensors and extract useful information.
- The gateway—gateways have the role of connecting sensors or sensor nodes with the outside world, and have the ability to perform local processing on the data before transmitting it to the Cloud. The data can be transmitted between all of the processing system counterparts via transmission media such as WiFi, Bluetooth [50], WiMaX, Zigbee [57], GSM [54], and 3G [55], with protocols such as IPv4, IPv6, MQTT, or DDS, etc.
- Cloud computing—three forms of IoT cloud are available: the cloud infrastructure, cloud platform, and software cloud. Some systems have used a cloud [52,55], while other systems are based totally on local processing [51,53,54]. Regarding cloud computing, it is an optional choice that may be used to lighten the load of work for the cloud. This processing can be performed at the local nodes before relaying the information to the cloud (Fog Computing); at the network edge, at gateways, or at intermediate nodes (Edge Computing); or can be performed locally in the sensor node (Mist Computing).
4.2. Combination UAV and IoT in Irrigation
UAVs have the potential to be part of an IoT solution for irrigation management by performing several tasks [9,58,59,60,61]. The tasks in which these aircraft can intervene are classified into two categories according to the communication between the UAV and other system parts.
Tasks with direct communication with the system include real-time communication between UAV and sensors, which is now available with the development of federated wireless smart sensors (WSN) which communicate with the UAV. The use of UAVs with intelligent ground-based WSNs is proven to be a robust and efficient solution for data collection, monitoring, and analysis. The advantage lies in online data collection and relaying to a central monitoring point, while effectively managing the network load and latency through optimized UAV trajectories [58]. The GS-UAV-SC (GS for ‘Ground Sensors’, and UAV-SC for ‘Unmanned aerial vehicle small cells’) model, proposed by Duangsuwane et al. 2020 [9], represents a perfect example. The GS-UAV-SC (Figure 4) is a soil moisture-monitoring sensor, which is connected to the UAV to stream data over the Internet in order for the data to be stored and calculated on the cloud platform. The farmer/user can further control the UAV in its movements around the field to collect all of the data from each sensor.
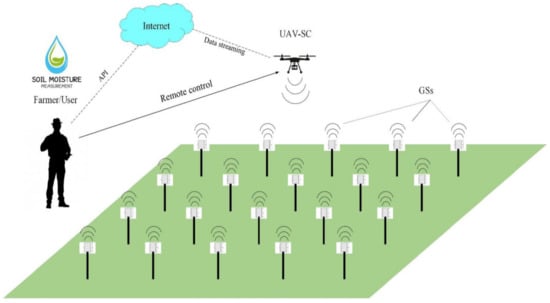
Figure 4.
Illustration of UAV and WSN [9].
On the other hand, a UAV can function as an energy controller. Especially with the fact that most wireless sensors in the IoT environment are facing the limited energy problem, the way in which to provide sustainable energy to these sensors has become a challenge. In this context, Liu et al. 2019 [59] presented a UAV to swap energy among wireless sensors by adapting the optimal resource allocation approach based on dynamic game theory (Figure 5).
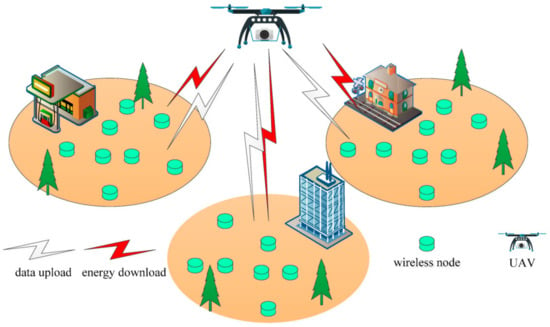
Figure 5.
Illustration of the system proposed by [59].
In tasks with non-direct communication with the system, a UAV can play the role of a versatile sensor for an IoT system by providing it with a set of external data extracted from UAV images after treatments. Data such as the plant height [60] can be used by the system to estimate the growth phase of the fields, and to provide them with the doses that suit with this phase.
The advantage lies in the use on large farms. The acquisition of several interesting data in the monitoring of the water status of crops (temperatures, humidity, ETc, water potential, etc.) requires the use of several sensors to cover the whole area, while a UAV has the potential to replace some sensors, and to provide the IoT system with these data after extracting them from the processed images.
5. Machine Learning for Data Processing and Decision-Making
Machine learning has emerged, along with the techniques of Big Data and high performance computing, to create new opportunities in the field of agrotechnologies through the implementation of systems that can support decision making in issues such as irrigation management. In this section, we present a general overview of machine learning and a specific overview of its use in irrigation management.
5.1. Machine Learning (ML)
“Learning is any process (algorithm) by which a system (model) improves performance (accuracy) from experience (data). The data may include hidden knowledge that explains the laws/rules/logic of some complex phenomenon” said Herbert A. Simon. By analyzing this definition, we can say that machine learning is about automatically extracting relevant information from data through advanced analysis.
ML has seen a vast development recently through its use in several fields and applications (media, marketing, medicine, scientific research, agriculture, etc.). This multiplicity refers to the multiplicity of algorithm models and approaches. These algorithms are classified mainly according to the nature of the training data [62]: supervised learning, unsupervised learning, semi-supervised learning and reinforcement learning.
Supervised learning is used to estimate an unknown (input, output) from known samples (input, output), where the output is labeled; obviously, the machine will learn faster with known samples. There are two types of such tasks: classification for the category prediction of an object, and regression for the prediction of a specific point on a numerical axis. Regression is essentially classification where we predict a number instead of a category. The most commonly used algorithms are Naive Bayes, Decision Tree, Logistic Regression, K-Nearest Neighbours, and the Support Vector Machine. In unsupervised learning, unlike supervised learning, only input samples are given to the learning system. The data are not labeled. The goal is to model the observations in order to better understand them. This is often referred to as clustering, dimensionality reduction or generalization. The most popular algorithms are k-means clustering, mean-shift, DBSCAN, Principal Component Analysis (PCA), Singular Value Decomposition (SVD), and Latent Dirichlet Allocation (LDA). Reinforcement learning is based on feedback. Training data is given only as feedback to a system in a dynamic environment. This feedback between the learning system and the interaction experience is useful to improve the performance in the task to be learned.
The performance evaluation of the models obtained by these ML algorithms is essential. These performances can be evaluated by several analysis techniques, such as the confusion matrix, the bias-variance trade-offs of the correlation coefficient (R2), the mean square error (MSE), and the error rate.
5.2. Neural Networks (ANN)
Machine Learning algorithms are in continuous development with the emergence of neural networks (ANN) and Deep Learning, which are inspired by the human brain, and are composed of interconnected artificial neurons capable of certain calculations from their inputs. The input activates the neurons of the first layer of the network, the output of which is the input of the second layer of neurons in the network. Similarly, each layer passes its output to the next layer, and the last layer produces the result. The layers between the input and output layers are known as hidden layers.
The term Deep Learning refers to multi-layer artificial neural networks (ANNs). It is considered one of the most powerful tools, and has become very popular in the literature, as it is capable of processing a huge amount of data. The value of having deeper hidden layers has recently started to outperform conventional methods in different domains, especially in pattern recognition [63]. The two popular architectures today are [63] convolutional neural networks (CNN), which are widely used in all cases involving images and videos, and recurrent neural networks (RNN), which are best for sequential data such as voice and text.
5.3. ML-UAV and Irrigation in Arboriculture
Irrigation automation faces many implementation problems, notably due to the lack of reliable and inexpensive sensors for important quantities (temperature, humidity, etc.), the non-linear nature of the simulation models, and the non-stationary dynamics of crop water requirements. The use of UAV and ML algorithms, and neural networks in particular, along with their ability to describe non-linear dynamic phenomena, offer very interesting prospects for making indirect measurements of water requirements and predictions of their evolution. ANN is the most adopted approach [5,7,37] to the development of models that can predict values of other data or that propose descriptions of data related to the water status of crops.
The popular use of ANN in the literature can be explained by the fact that a well-trained neural network can simulate the work of any of the algorithms described in this section. This universality is what has made them very popular in moving beyond classical ANN to Deep Learning that works more accurately, e.g., in order to solve increasingly complex problems such as crop water status. It is not enough to add more and more layers because the huge issue of neural networks, which might cause the problem of the difficulty of learning, is the growing computational complexity with the number of layers. This provides evidence of the importance of a well-established architecture.
Speaking of architectures, among the ANN architectures adopted in crop water status analysis are multilayer perceptron (MLP) [37], with a backpropagation process for weight calculations. A two-layer feedback network with ten hidden neurons, and a standard two-layer feedforward network has a sigmoid transfer function in the hidden layer and a linear transfer function in the output layer structure [7]. A deep stochastic configuration network (DeepSCN) [5], which was first proposed by Wang et al. in 2017. Compared to other random learning algorithms, DeepSCNs randomly assign the input weights and biases of hidden nodes. The output weights are evaluated analytically in a constructive method. This performs better than other random neural networks in terms of rapid learning, the scope of random parameters, and the human intervention required [64]. It presented good results in building a model that links Kc and NDVI in a pomegranate orchard. The performance of the model was evaluated with the RMSE during training, which was close to 0 (0.046), with a correlation coefficient R2 close to 1 (0.999) during the model validation [5]. This provided evidence that NDVI variations from UAV imagery can be used to globally explain the utility of ML algorithms in addressing complex issues such as crop water status.
5.4. Dashboard and GIS: Approaches to Decision Making
Real-time data representation and the coordination of information from multiple sensors allow decision-makers to adjust irrigation management strategies in near-real time and can provide farmers with emergency awareness. Dashboards are frequently used to monitor and depict this data, either in a general way (mobile application, online platform) or in a specific way (mobile GIS, web GIS).
Focusing on irrigation management, there are several examples to cite:
- IRRIX is a web-based platform for irrigation monitoring that consists in the estimation of crop water requirements using the water balance method [41] and using sensor feedback to empirically adjust the irrigation rates for each sector [65].
- IMO was developed by Oregon State University and the Natural Resources Conservation Service (NRCS). It explicitly analyzes irrigation efficiency, accounts for spatial variability in soil properties and irrigation uniformity, performs simultaneous scheduling for all of the fields on the farm, accounts for energy consumption and associated costs, and uses both ET and soil moisture measurements to improve irrigation accuracy. IMO was developed specifically to support irrigation management when water supply or distribution system capacity is limited [66].
- The Irriga System is a mobile application that recommends the depth of water to be applied to each crop field throughout the harvest season [67].
- IrriFresa is a mobile application that was developed for mobile devices (smartphones and tablets). This application was developed to update the irrigation schedule in real time, and to facilitate access to daily irrigation schedules for farmers. The mobile application is connected to the nearest farm weather station, and then the values are downloaded from this weather station to update the initial irrigation schedule based on the differences between the real-time values and the historical average of the time series over the period considered [68].
- RIMIS can provide information on the uniformity of water distribution, its lack or excess, which decisions to adopt for the next day, the equitable irrigation supply of tertiary canals, and the characterization of their irrigation distribution performance over the season. RIMIS dynamically links a field irrigation demand-forecasting model for the area irrigated by a canal network into the GIS, as developed with the VBA programming language in ArcGIS software [69].
- SIMIS is intended for irrigated area management, and was designed to assist in planning and operations. It was based on a water balance model covering different modules to model a root zone water balance that was performed in daily time series steps [70].
- AFSIRS is a GIS and database management system for the authorization and scheduling of irrigation water demand [71].
Water resource management decision making requires crucial knowledge, wisdom, and critical thinking, as well as interdisciplinary techniques to identify alternative courses of action and evaluate their effects. The combination of technology and the physical and life sciences helps managers to understand environmental problems. A dashboard or GIS system will not guide us to a good decision; it is a whole process. In other words, a decision-making system (a Dashboard or GIS system, etc.) is still an interactive computer system designed to help decision-makers use communication technologies, data, documents, knowledge, and models to accomplish the tasks of the decision-making process.
6. Discussion
The use of new technologies, UAV, IoT sensors, and ML algorithms as data processing approaches, in precision agriculture and irrigation management particularly, offers a better vision with the possibility to link information to very specific crop locations. In irrigation management, spatial representation through maps of water stress distribution, evapotranspiration, and humidity, etc., allows the management of crop water requirements in a precise way, such that irrigation operations can be conducted by taking into account the variability and spatial and temporal distribution of these factors (Kc, Ψ, g, T, H, etc.).
The way in which satellites help people’s daily lives is just as important, and the scope of information that satellites can provide is indispensable. Drones have been proven to be a reliable alternative when it comes to the collection of information that would otherwise be provided by satellites more quickly and less expensively. Typically, platforms collect information in very different ways, at completely different scales. Ultimately, using one or both depends on the tasks and the specific data to be obtained. In arboriculture, UAVs are a very practical tool presenting a medium-to-high performance for multiple applications [4,5,6,22,23,24,25,26,35,72]. With the high spatial and temporal resolutions that can be achieved, they allow the characterization of entire fields with high-quality images to analyze individual trees. Moreover, they offer the possibility of flying over the fields at the right time to perform various kinds of experiments. UAVs associated with the relevant sensors are powerful technologies to obtain accurate information about the spatial and temporal variations in the soil moisture and vegetation status in order to optimize irrigation system management. In addition, the cost-effectiveness of UAVs encourages their adoption by farmers because of economic advantages, including rapid and high-quality data collection. UAVs provide more suitable details on soil and orchards compared to satellite imagery and direct field inspection methods, which are tedious, costly, and time-consuming. The selection of the appropriate UAV platform depends on the type of application and the characteristics of the study area. More efforts are needed in the future to encourage end-users in arboriculture to incorporate UAVs into agricultural operations.
Although UAVs have advantages over other technologies, and although their potential in arboriculture is huge, several challenges and limitations affect their adoption by farmers. It is a challenging decision to make, as it involves technical, agronomic, and economic factors. Many UAV platforms and onboard sensors are available in the market. Moreover, UAVs collect a huge amount of data. Advanced data analytics tools are required to extract and interpret information from the collected data. Therefore, an investment in time and money is necessary to learn the required skills for the suitable use of UAVs. Consequently, farmers require specific information on the technical and economic benefits of UAVs in arboriculture before adopting them. The issue of training is important in order to identify the compatibility of UAV technology with the actual practices of the farmers, to ensure the effective monitoring of the farm, reduce the production costs and provide suitable information from the UAV to improve the decision making. The automation of processes is also a requirement to guide the users through all of the steps of flight planning, data collection, data analysis, and interpretation. More efforts are needed in the future to encourage end-users in arboriculture to be more open to the use of UAVs.
The adoption of ML algorithms, as a method of processing data extracted from UAV imagery, comes down to the fact that ML techniques are capable of handling optimization problems, in addition to handling multidimensional and multivariate data, and extracting implicit links within huge datasets in a complex environment, such as the relationship between water requirements and the physical and biological morphology of trees [5,7,37]. In order to identify a ML solution for data processing, especially in irrigation water management, several factors must be considered, e.g., the physical and biological morphology of the trees, their dynamic environment (where several factors can intervene such as land and atmosphere), and the non-linear and non-stationary dynamics of crop water demand. All of these considerations lead to the use of ANN techniques, particularly deep learning, which can be explained by the fact that a well-trained deep neural network can have the ability to describe non-linear dynamic phenomena and provide very interesting prospects for making indirect measurements of water requirements and forecasting their evolution. With the availability of a huge amount of labeled data, deep ANN is the most often-used method in many recent studies. However, the common challenges of ML applications are the acquisition of relevant data, the availability of existing data, and the quality and description of the data (metadata, labeled data). Furthermore, the data may have a high level of irrelevant and redundant information, which might influence the efficacy of the learning algorithms.
On the other hand, the ability to collect and transfer data, over a real-time network without requiring human-to-human or human-to-computer interaction, positions the IoT as an innovative technology for automated and smart irrigation [51,52,53,54,55]. For the architecture of an IoT irrigation management system, there are different types of sensors, such as humidity sensors, temperature sensors, and light sensors, etc.; various types of transmission methods, in particular Wifi, Bluetooth [51], WiMaX, Zigbee [57], GSM [54], and 3G [55]; and protocols such as IPv4, IPv6, MQTT, and DDS, etc., which can be used as discussed in Section 4.1. The choice of sensors and or the configuration generally is directly related to the purpose behind the system. The method of transmission is related to the range and coverage of the system, as well as the nature of the transmitter and receiver used. The distinction is made due to the technical limitations [73] such as interference, such that the deployment of massive IoT devices for agricultural and other purposes will lead to interference issues that can result in data loss and reduce the IoT system’s reliability. As well as security and privacy, a lack of proper security can lead to data loss, privacy bridges, and access to raw information. Additionally, deploying IoT devices in an outdoor environment will expose the devices to harsh environmental conditions that can lead to the degradation of the deployed sensors over time, as well as communication failures. The adoption of the IoT has several benefits for irrigation in general, such as helping to promote community irrigation, especially in rural areas. The IoT may be used to promote services that allow the community to exchange data and information, as well as improving contact between farmers and agricultural specialists. In addition, the ability to reduce costs and reduce waste in the application of agricultural inputs, such as water, increases productivity. As well as the ability to remotely monitor devices and equipment, the ability to know when and where to irrigate will help save time and money in the inspection of the water status of large fields compared to personnel physically inspecting the field.
7. Conclusions
The water stress that faces global agriculture requires a scientific intervention to develop solutions to this problem in order to ensure food security and sustainable development by making irrigation management one of the priorities. The papers treated have shown a significant contribution of UAV-ML-IoT technologies in irrigation management and the analysis of the water status of crops. This contribution is due to the relevant information that can be extracted from UAV images through the different sensors (RGB, multispectral, heperspectral, and thermal), and due to the ability of ML algorithms to define models for the estimation of water and other requirements by linking ground and aerial measurements, as shown by the medium-to-high correlation coefficients and the important role of wirelessly connected sensors in the implementation of smart systems.
The challenge of water scarcity, combined with the utility of these technologies, has made the development of an integrated Drone-IoT-ML approach to irrigation management an absolute necessity. Focusing on Morocco and developing countries in general, the usefulness of these technologies can be emphasised in the face of a set of challenges such as the difficult financial situation of many farms and the inability of the farmer to use the information if human interventions are not available. Those challenges are likely to hinder the widespread adoption of these new technologies by farmers in order to adapt and modernize their production practices to obtain the best returns on these investments.
Those facts suggest two perspectives for our next works, which are the estimation of water needs in the case of arboriculture, and the implementation of a system of which the role will be to balance the estimated water needs and the water provisioning, based on the Drone-IoT-ML approach.
Author Contributions
Conceptualization, Y.A., M.B., R.Y., I.S., K.S. and L.K.; methodology, Y.A., M.B. and R.Y.; validation, Y.A., M.B., R.Y., I.S., K.S. and L.K.; formal analysis, Y.A., M.B. and R.Y.; investigation, Y.A., M.B. and R.Y.; resources, Y.A., M.B. and R.Y.; writing—original draft preparation, Y.A., M.B. and R.Y.; writing—review and editing, Y.A., M.B., R.Y. and I.S.; supervision, M.B. and R.Y.; project administration, M.B.; funding acquisition, M.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Ministry of Agriculture, Fisheries, Rural Development, Water and Forests, Morocco, Program MCRDV (2019/2022).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| ANN | Artificial Neural Networks |
| CHM | Canopy Height Model |
| CNN | Convolutional Neural Networks |
| CWSI | Crop Water Stress Index |
| DDS | Data Distribution Service |
| DeepSCN | Deep Stochastic Configuration Network |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| ET | Evapotranspiration |
| ExNIR | Excess NIR |
| ExRE | Excess RE |
| FPGA | Field-Programmable Gate Array Technology |
| GNDVI | Green Normalized Difference Vegetation Index |
| GRVI | Green Red Vegetation Index |
| GS | Ground Sensors |
| GRVI | Green Red Vegetation Index |
| IoT | Internet of Things |
| LDA | Latent Dirichlet Allocation |
| LNC | Leaf Nitrogen Content |
| ML | Machine Learning |
| MLP | Multilayer Perceptron |
| MQTT | Message Queuing Telemetry Transport |
| NIR | Near Infrared |
| NDRE | Normalized Difference Red-edge Index |
| NDVI | Normalized Difference Vegetation Index |
| OSAVI | Optimized Soil-adjusted Vegetation Index |
| PCA | Principal Component Analysis |
| QTRA | Quantified Tree Risk Assessment |
| RDVI | Re-normalized Difference Vegetation Index |
| RE | Red Edge |
| RFID | Radio Frequency Identification |
| RGB | Red, Green, Blue |
| RNN | Recurrent Neural Networks |
| SC | Small Cells |
| SVD | Singular Value Decomposition |
| TRI | Tree Risk Index |
| TRRVI | Red-range Transformed Vegetation Index |
| VI | Vegetation Index |
References
- FAO. L’eau, L’Agriculture and L’Alimentation. L’Utilisation de L’Eau en Agriculture. Available online: https://www.fao.org/ (accessed on 2 January 2020).
- World Resources Institute (WRI). Data, Water Stress by Country. 2021. Available online: https://www.wri.org (accessed on 2 January 2020).
- Salman, M.; Maher, P.E.; Lamaddalena, N. Field Guide to Improve Water Use Efficiency in Small-Scale Agriculture: The Case of Burkina Faso, Morocco and Uganda; FAO: Rome, Italy, 2020; ISBN 9789251317600. [Google Scholar]
- Blanco, V.; Blaya-Ros, P.; Castillo, C.; Soto-Vallés, F.; Torres-Sánchez, R.; Domingo, R. Potential of UAS-Based Remote Sensing for Estimating Tree Water Status and Yield in Sweet Cherry Trees. Remote Sens. 2020, 12, 2359. [Google Scholar] [CrossRef]
- Niu, H.; Wang, D.; Chen, Y. Estimating Actual Crop Evapotranspiration Using Deep Stochastic Configuration Networks Model and UAV-Based Crop Coefficients in a Pomegranate Orchard. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping V, Online, 27 April–8 May 2020; p. 11. [Google Scholar]
- Gonzalez-Dugo, V.; Zarco-Tejada, P.; Nicolás, E.; Nortes, P.A.; Alarcón, J.J.; Intrigliolo, D.S.; Fereres, E. Using high resolution UAV thermal imagery to assess the variability in the water status of five fruit tree species within a commercial orchard. Precis. Agric. 2013, 14, 660–678. [Google Scholar] [CrossRef]
- Romero, M.; Luo, Y.; Su, B.; Fuentes, S. Vineyard water status estimation using multispectral imagery from an UAV platform and machine learning algorithms for irrigation scheduling management. Comput. Electron. Agric. 2018, 147, 109–117. [Google Scholar] [CrossRef]
- Park, S.; Ryu, D.; Fuentes, S.; Chung, H.; Hernández-Montes, E.; O’Connell, M. Adaptive Estimation of crop water stress in nectarine and peach orchards using high-resolution imagery from an unmanned aerial vehicle (UAV). Remote Sens. 2017, 9, 828. [Google Scholar] [CrossRef]
- Duangsuwan, S.; Teekapakvisit, C.; Maw, M.M. Development of Soil Moisture Monitoring by using IoT and UAV-SC for Smart Farming Application. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 381–387. [Google Scholar] [CrossRef]
- Bulanon, D.M.; Lonai, J.; Skovgard, H.; Fallahi, E. Evaluation of Different Irrigation Methods for an Apple Orchard Using an Aerial Imaging System. ISPRS Int. J. Geo Inf. 2016, 5, 79. [Google Scholar] [CrossRef]
- Albornoz, C.; Giraldo, L.F. Trajectory Design for Efficient Crop Irrigation with a UAV. In Proceedings of the 2017 IEEE 3rd Colombian Conference on Automatic Control (CCAC), Cartagena, Colombia, 18–20 October 2017; pp. 1–6. [Google Scholar]
- Dubois, S.; Vanhellemont, Y.; Bouw, M. Drones at the Service of Construction: Technologies, Challenges and Perspectives; Scientific and Technical Center for Construction: Brussels, Belgium, 2019; p. 69. [Google Scholar]
- Yu, S.; Heo, J.; Jeong, S.; Kwon, Y. Technical Analysis of VTOL UAV. JCC 2016, 4, 92–97. [Google Scholar] [CrossRef][Green Version]
- Han, X.; Thomasson, J.A.; Bagnall, G.C.; Pugh, N.A.; Horne, D.W.; Rooney, W.L.; Jung, J.; Chang, A.; Malambo, L.; Popescu, S.C.; et al. Measurement and Calibration of Plant-Height from Fixed-Wing UAV Images. Sensors 2018, 18, 4092. [Google Scholar] [CrossRef]
- Del Cerro, J.; Ulloa, C.C.; Barrientos, A.; Rivas, J.D.L. Unmanned Aerial Vehicles in Agriculture: A Survey. Agronomy 2021, 11, 203. [Google Scholar] [CrossRef]
- Wehrhan, M.; Sommer, M. A Parsimonious Approach to Estimate Soil Organic Carbon Applying Unmanned Aerial System (UAS) Multispectral Imagery and the Topographic Position Index in a Heterogeneous Soil Landscape. Remote Sens. 2021, 13, 3557. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Ezenne, G.; Jupp, L.; Mantel, S.; Tanner, J. Current and potential capabilities of UAS for crop water productivity in precision agriculture. Agric. Water Manag. 2019, 218, 158–164. [Google Scholar] [CrossRef]
- Silvestri, M.; Marotta, E.; Buongiorno, M.; Avvisati, G.; Belviso, P.; Sessa, E.B.; Caputo, T.; Longo, V.; De Leo, V.; Teggi, S. Monitoring of Surface Temperature on Parco delle Biancane (Italian Geothermal Area) Using Optical Satellite Data, UAV and Field Campaigns. Remote Sens. 2020, 12, 2018. [Google Scholar] [CrossRef]
- Ronchi, D.; Limongiello, M.; Barba, S. Correlation among Earthwork and Cropmark Anomalies within Archaeological Landscape Investigation by Using LiDAR and Multispectral Technologies from UAV. Drones 2020, 4, 72. [Google Scholar] [CrossRef]
- Wang, F.; Yao, X.; Xie, L.; Zheng, J.; Xu, T. Rice Yield Estimation Based on Vegetation Index and Florescence Spectral Information from UAV Hyperspectral Remote Sensing. Remote Sens. 2021, 13, 3390. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Martins, L.; Sousa, A.; Peres, E.; Sousa, J. Monitoring of Chestnut Trees Using Machine Learning Techniques Applied to UAV-Based Multispectral Data. Remote Sens. 2020, 12, 3032. [Google Scholar] [CrossRef]
- De Petris, S.; Berretti, R.; Sarvia, F.; Mondino, E.C.B. Precision Arboriculture: A New Approach to Tree Risk Management Based on Geomatics Tools. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology XXI, Strasbourg, France, 9–11 September 2019; p. 16. [Google Scholar]
- Osco, L.P.; Ramos, A.P.M.; Moriya, A.S.; de Souza, M.; Junior, J.M.; Matsubara, E.; Imai, N.N.; Creste, J.E. Improvement of leaf nitrogen content inference in Valencia-orange trees applying spectral analysis algorithms in UAV mounted-sensor images. Int. J. Appl. Earth Obs. Geoinf. 2019, 83, 101907. [Google Scholar] [CrossRef]
- Ok, A.O. Detection of citrus trees from uav dsmS. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 27–34. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Rouse, J.W.; Hass, R.H.; Shell, J.A.; Deering, D.W. Monitoring vegetation systems in the great plains with ERTS-1. In Proceedings of the 3rd Earth Resources Technology Satellite Symposium, Washington, DC, USA, 10–14 December 1974; pp. 309–317. [Google Scholar]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Roujean, J.-L.; Breon, F.-M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Baret, F.; Bacour, C.; Derive, G. CYcLOPES Algorithmic Development for Estimating Biophysical Products from Large Swath Sensors. In Proceedings of the 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 3902–3904. [Google Scholar]
- Hunt, E.R.; Hively, W.D.; Mccarty, G.W.; Daughtry, C.S.T.; Forrestal, P.J.; Kratochvil, R.J.; Carr, J.L.; Allen, N.F.; Fox-Rabinovitz, J.R.; Miller, C.D. NIR-Green-Blue High-Resolution Digital Images for Assessment of Winter Cover Crop Biomass. GIScience Remote Sens. 2011, 48, 86–98. [Google Scholar] [CrossRef]
- Idso, S.B.; Jackson, R.D.; Pinter, P.J., Jr.; Reginato, R.J.; Hatfield, J.L. Normalizing the stress degree day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Sylvester, G. E-Agriculture in Action: Drones for Agriculture; FAO: Bangkok, Thailand, 2018; ISBN 9789251302460. [Google Scholar]
- Feng, A.; Zhou, J.; Vories, E.D.; Sudduth, K.A.; Zhang, M. Yield estimation in cotton using UAV-based multi-sensor imagery. Biosyst. Eng. 2020, 193, 101–114. [Google Scholar] [CrossRef]
- Quebec International Arboriculture Society (SIAQ). About-Arboriculture-and-Tree-Care, Resource-Center, Recognizing Tree Risk. 2021. Available online: https://www.siaq.org/ (accessed on 3 February 2020).
- Poblete, T.; Ortega-Farías, S.; Moreno, M.A.; Bardeen, M. Artificial Neural Network to Predict Vine Water Status Spatial Variability Using Multispectral Information Obtained from an Unmanned Aerial Vehicle (UAV). Sensors 2017, 17, 2488. [Google Scholar] [CrossRef]
- Espinoza, C.Z.; Khot, L.R.; Sankaran, S.; Jacoby, P.W. High Resolution Multispectral and Thermal Remote Sensing-Based Water Stress Assessment in Subsurface Irrigated Grapevines. Remote Sens. 2017, 9, 961. [Google Scholar] [CrossRef]
- Ballester, C.; Zarco-Tejada, P.J.; Nicola, E.; Alarco, J.J.; Fereres, E.; Intrigliolo, D.S.; Gonzalez-Dugo, V. Evaluating the performance of xanthophyll, chlorophyll and structure-sensitive spectral indices to detect water stress in five fruit tree species. Precis. Agric. 2018, 19, 178–193. [Google Scholar] [CrossRef]
- ASCE. Evaporation and irrigation water requirement. ASCE Man. Rep. Eng. Pract. 1990, 70, 360. [Google Scholar]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration: Guidelines for Computing Crop Water Requirements; Food and Agriculture Organization of the United Nations: Rome, Italy, 1998. [Google Scholar]
- Ahmed, I.M.; Nadira, U.A.; Zhang, G.; Wu, F. Exploration and Utilization of Drought-Tolerant Barley Germplasm; Elsevier: Amsterdam, The Netherlands, 2016; pp. 115–152. [Google Scholar]
- Jones, H.G. Monitoring plant and soil water status: Established and novel methods revisited and their relevance to studies of drought tolerance. J. Exp. Bot. 2006, 58, 119–130. [Google Scholar] [CrossRef]
- Berni, J.A.J.; Zarco-Tejada, P.J.; Sepulcre-Cantó, G.; Fereres, E.; Villalobos, F. Mapping canopy conductance and CWSI in olive orchards using high resolution thermal remote sensing imagery. Remote Sens. Environ. 2009, 113, 2380–2388. [Google Scholar] [CrossRef]
- Stagakis, S.; Gonzalez-Dugo, V.; Cid, P.; Guillen-Climent, M.; Zarco-Tejada, P. Monitoring Water Stress and Fruit Quality In An Orange Orchard Under Regulated Deficit Irrigation Using Narrow-band Structural and Physiological Remote Sensing Indices. ISPRS J. Photogramm. Remote Sens. 2012, 71, 47–61. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, temperature and narrow-band indices acquired from a UAV platform for water stress detection using a micro-hyperspectral imager and a thermal camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Santesteban, L.; Gennaro, S.D.; Herrero-Langreo, A.; Miranda, C.; Royo, J.; Matese, A. High-resolution UAV-based Thermal Im-aging to Estimate The Instantaneous and Seasonal Variability of Plant Water Status within A Vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Egea, G.; Padilla-Díaz, C.M.; Martinez-Guanter, J.; Fernández, J.E.; Pérez-Ruiz, M. Assessing a crop water stress index derived from aerial thermal imaging and infrared thermometry in super-high density olive orchards. Agric. Water Manag. 2017, 187, 210–221. [Google Scholar] [CrossRef]
- Zhao, T.; Stark, B.; Chen, Y.Q.; Ray, A.L.; Doll, D. Challenges in Water Stress Quantification Using Small Unmanned Aerial System (sUAS): Lessons from a Growing Season of Almond. J. Intell. Robot. Syst. 2017, 88, 721–735. [Google Scholar] [CrossRef]
- Farooq, M.U.; Waseem, M.; Mazhar, S.; Khairi, A.; Kamal, T. A Review on Internet of Things (IoT). Int. J. Comput. Appl. 2015, 113, 1–7. [Google Scholar]
- Vaishali, S.; Suraj, S.; Vignesh, G.; Dhivya, S.; Udhayakumar, S. Mobile Integrated Smart Irrigation Management and Monitoring System Using IOT. In Proceedings of the 2017 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 6–8 April 2017; pp. 2164–2167. [Google Scholar]
- Kamaruddin, F.; Malik, N.N.N.A.; Murad, N.A.; Latiff, N.M.A.; Yusof, S.K.S.; Hamzah, S.A. IoT-based intelligent irrigation management and monitoring system using arduino. Telkomnika 2019, 17, 2378. [Google Scholar] [CrossRef]
- Imteaj, A.; Rahman, T.; Hossain, M.K.; Zaman, S. IoT Based Autonomous Percipient Irrigation System Using Raspberry Pi. In Proceedings of the 2016 19th International Conference on Computer and Information Technology (ICCIT), Dhaka, Bangladesh, 18–20 December 2016; pp. 563–568. [Google Scholar]
- Rajkumar, M.N.; Abinaya, S.; Kumar, V.V. Intelligent irrigation system—An IOT based approach. In Proceedings of the 2017 International Conference on Innovations in Green Energy and Healthcare Technologies (IGEHT), Coimbatore, India, 16–18 March 2017. [Google Scholar]
- Niño, J.M.D.; Oliver-Manera, J.; Girona, J.; Casadesús, J. Differential irrigation scheduling by an automated algorithm of water balance tuned by capacitance-type soil moisture sensors. Agric. Water Manag. 2020, 228, 105880. [Google Scholar] [CrossRef]
- Oukaira, A.; Benelhaouare, A.Z.; Kengne, E.; Lakhssassi, A. FPGA-Embedded Smart Monitoring System for Irrigation Decisions Based on Soil Moisture and Temperature Sensors. Agronomy 2021, 11, 1881. [Google Scholar] [CrossRef]
- Gao, P.; Xie, J.; Yang, M.; Zhou, P.; Chen, W.; Liang, G.; Chen, Y.; Han, X.; Wang, W. Improved Soil Moisture and Electrical Conductivity Prediction of Citrus Orchards Based on IoT Using Deep Bidirectional LSTM. Agriculture 2021, 11, 635. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef]
- Liu, B.; Xu, H.; Zhou, X. Resource Allocation in Unmanned Aerial Vehicle (UAV)-Assisted Wireless-Powered Internet of Things. Sensors 2019, 19, 1908. [Google Scholar] [CrossRef]
- Yang, C.-Y.; Yang, M.-D.; Tseng, W.-C.; Hsu, Y.-C.; Li, G.-S.; Lai, M.-H.; Wu, D.-H.; Lu, H.-Y. Assessment of Rice Developmental Stage Using Time Series UAV Imagery for Variable Irrigation Management. Sensors 2020, 20, 5354. [Google Scholar] [CrossRef]
- Ouyang, F.; Cheng, H.; Lan, Y.; Zhang, Y.; Yin, X.; Hu, J.; Peng, X.; Wang, G.; Chen, S. Automatic delivery and recovery system of Wireless Sensor Networks (WSN) nodes based on UAV for agricultural applications. Comput. Electron. Agric. 2019, 162, 31–43. [Google Scholar] [CrossRef]
- Zhang, X.-D. Machine Learning. In A Matrix Algebra Approach to Artificial Intelligence; Springer: Singapore, 2020; pp. 223–440. [Google Scholar]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017. [Google Scholar]
- Wang, S.; Garcia, M.; Bauer-Gottwein, P.; Jakobsen, J.; Zarco-Tejada, P.J.; Bandini, F.; Paz, V.S.; Ibrom, A. High spatial resolution monitoring land surface energy, water and CO2 fluxes from an Unmanned Aerial System. Remote Sens. Environ. 2019, 229, 14–31. [Google Scholar] [CrossRef]
- Casadesús, J.; Mata, M.; Marsal, J.; Girona, J. A general algorithm for automated scheduling of drip irrigation in tree crops. Comput. Electron. Agric. 2012, 83, 11–20. [Google Scholar] [CrossRef]
- Charles, C.H.; Chadi, S. A Web Based Advisory Service for Optimum Irrigation Management. In Proceedings of the 5th National Decennial Irrigation Conference, Phoenix, AZ, USA, 5–8 December 2010. [Google Scholar]
- Mani, K.; Iniyan, V.S. Study on Mobile Applications for Water Quality in Specific to Irrigation Sector. Int. Res. J. Multidiscip. Technovation 2019, 1, 588–596. [Google Scholar] [CrossRef]
- Perea, R.G.; García, I.F.; Arroyo, M.M.; Díaz, J.R.; Poyato, E.C.; Montesinos, P. Multiplatform application for precision irrigation scheduling in strawberries. Agric. Water Manag. 2016, 183, 194–201. [Google Scholar] [CrossRef]
- Rowshon, M.K.; Amin, M.S.M.; Lee, T.S.; Shariff, A.R.M. GIS-Integrated Rice Irrigation Management Information System for a River-Fed Scheme. Water Resour. Manag. 2009, 23, 2841–2866. [Google Scholar] [CrossRef]
- Mateos, L.; López-Cortijo, I.; Sagardoy, J.A. SIMIS: The FAO decision support system for irrigation scheme management. Agric. Water Manag. 2002, 56, 193–206. [Google Scholar] [CrossRef]
- Satti, S.R.; Jacobs, J.M. A GIS-based model to estimate the regionally distributed drought water demand. Agric. Water Manag. 2004, 66, 1–13. [Google Scholar] [CrossRef]
- Sozzi, M.; Kayad, A.; Gobbo, S.; Cogato, A.; Sartori, L.; Marinello, F. Economic Comparison of Satellite, Plane and UAV-Acquired NDVI Images for Site-Specific Nitrogen Application: Observations from Italy. Agronomy 2021, 11, 2098. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).