
Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment

Abstract
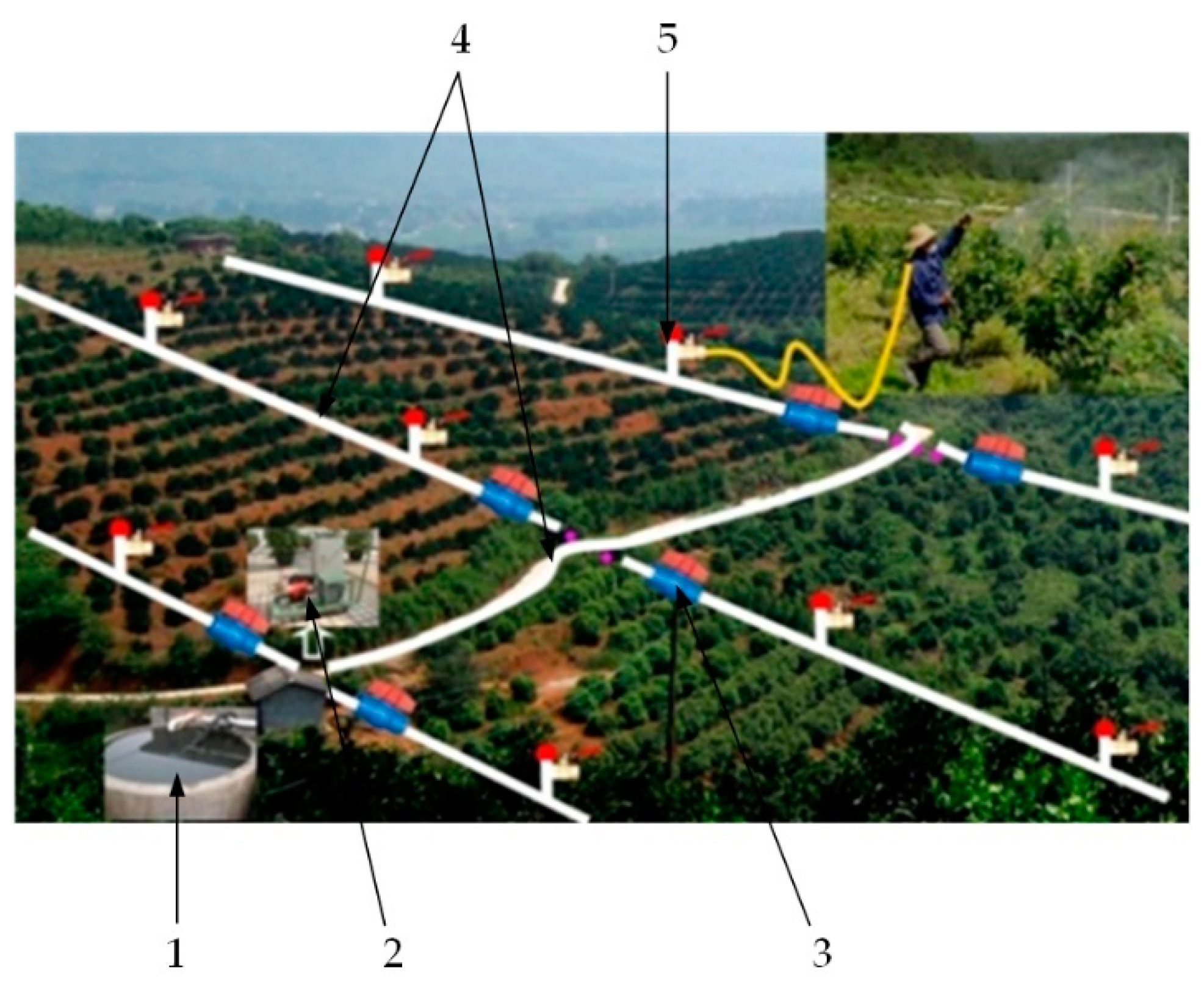
:1. Introduction
2. Materials and Method
2.1. Pesticide Mixing Apparatus Structure and CFD Model
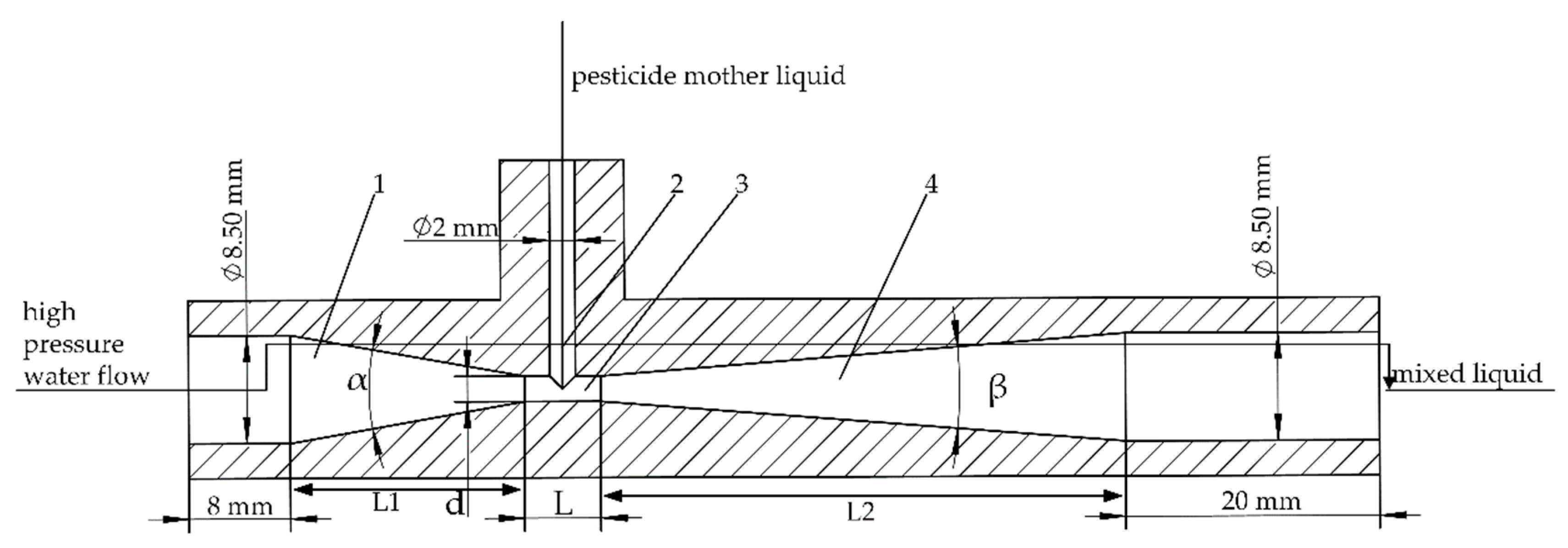
2.1.1. Design of Pesticide Mixing Apparatus Basic Structure
2.1.2. Establishment of Pesticide mixing Apparatus CFD Model
2.2. Design of Orthogonal Experiment
2.2.1. Design of Orthogonal Experiment Plan
2.2.2. Experiment Evaluation Indexes and Factor Level
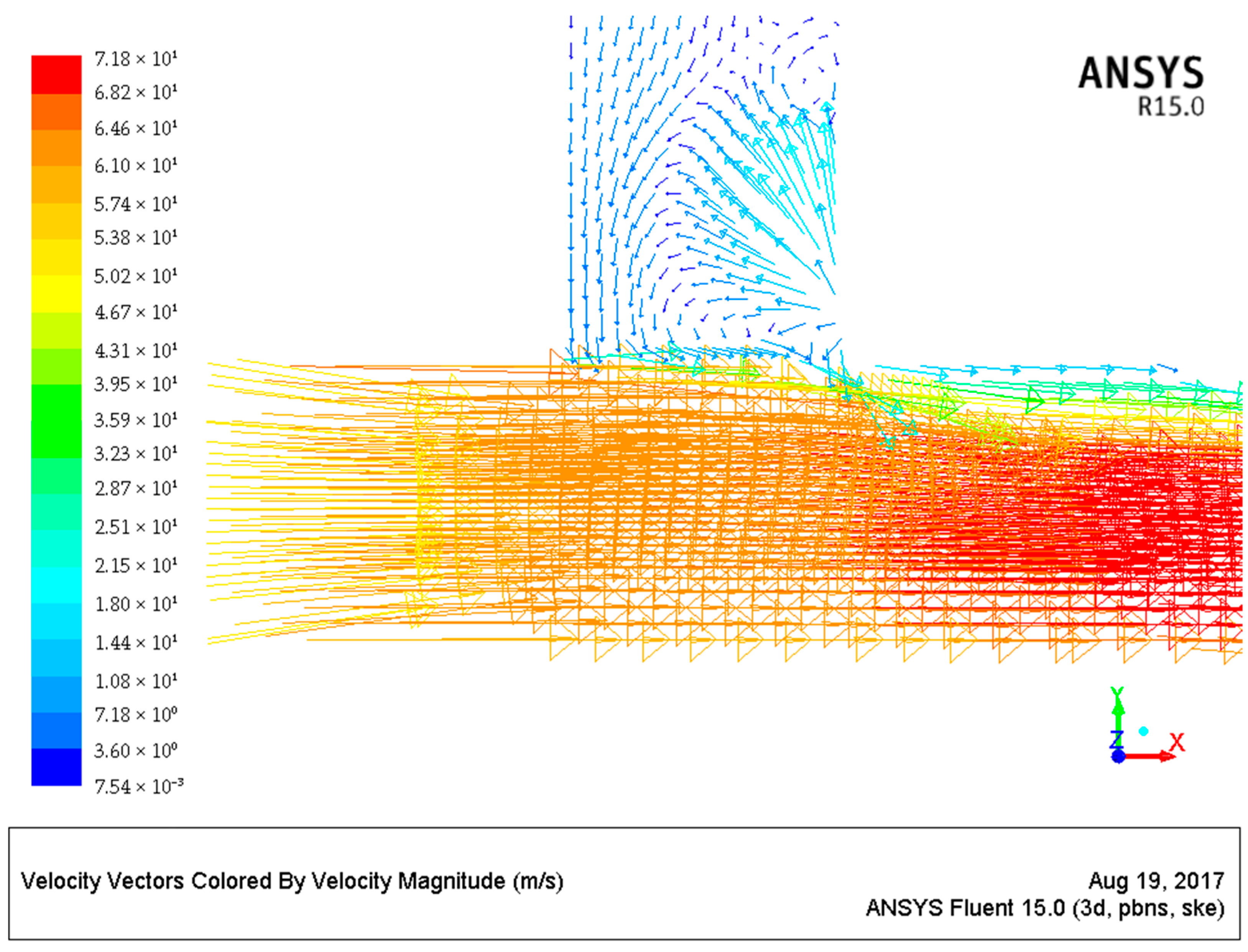
- Lifting heigh: the pesticide dissolution performance of the pesticide mixing apparatus is evaluated through observing the velocity vector diagram of the suction chamber traverse section, and recording the maximum height numerical value of high pressure water flow rising in the suction chamber. If the maximum height of high pressure water flow rising is lower, the obstruction of rising high pressure water flow to the sucked pesticide mother liquid is smaller, and the pesticide dissolution performance is better.
- Turbulent kinetic energy: the numerical value of the maximum turbulent kinetic energy reached by the pesticide mixing apparatus internal flow field is observed and recorded for measuring the mixing ability of the pesticide mixing apparatus. If the maximum turbulent kinetic energy is higher, the pesticide mixing apparatus internal flow field turbulence development is better, the flow field state is more unstable, the water and pesticide mother liquid can be mixed better, and the mixing ability is stronger.
- Pressure recovery distance: the distance for increasing the diffusion tube internal pressure from 0.1 MPa to 0.9 MPa is observed and recorded for measuring the pressure recovery ability of the pesticide mixing apparatus. If the distance is shorter, the pressure recovery is faster, the pressure recovery ability is stronger, and the pressure loss is smaller.
2.2.3. Design of Orthogonal Experiment Table
2.3. Boundary Condition and Model Selection
- Fluent solver selection;3DFluent solver should be selected according to the pesticide mixing apparatus model.
- Mesh importing;Menu bar File→Read→Mesh options are selected, and then msh files exported from ICEM software are selected.
- Mesh checking;Menu bar Mesh→Check options are selected, and the operator should observe whether meshes suffer from negative volume. Meshes are divided again if there is negative volume.
- Setting of computational domain dimensions;Since the basic unit of the pesticide mixing apparatus internal flow channel CFD model is mm, and the basic unit of Fluent software is m, it is necessary to select the menu bar Mesh→Scale options for setting the imported model as mm.
- Selection of calculation model;Pressure-Based solver is selected for General parameter setting panel. Steady stable-state flow is selected for the panel Time option. Viscous-Standard k-e is used for standing the Models parameter setting panel, namely standard k-ε two-equation model.
- Confirmation of fluid physical properties;Water-liquid is selected in the material depot equipped for the Fluent software; namely liquid water is regarded as the working liquid material.
- Definition of operating environment;Menu bar Define→Operating Conditions option is selected, 101325 is the input into the Operating Pressure textbox, as the operating environment namely has standard barometric pressure.
- Appointment of boundary condition;In the Boundary Conditions parameter settings panel, high pressure water flow inlet is set as pressure inlet, gauge pressure is 2 MPa, pesticide mother liquid inlet is set as pressure inlet, and gauge pressure is 0 MPa; mixed liquid outlet is set as pressure outlet, and gauge pressure is 1 MPa.
- Solving method setting;Th pressure velocity coupling solution algorithm of SIMPLEC algorithm is set in the Solution Methods parameter setting panel, PRESTO interpolating scheme is adopted for pressure equation solution, and other equation solutions are dispersed by Second Order Upwind method.
- Solution monitoring setting;Residual error convergence standard of 1 × 10−4 is set for Monitors parameter settings panel. One monitoring face is established for monitoring the change of mixture outlet mass flow rate.
- Flow field initialization;Hybird Initialization is adopted for initializing flow field in the Solution initialization parameter settings panel.
- Iterative solution;Iteration frequency of 4000 is set as the Run Calculation parameter settings panel to start the numerical simulation calculation.
- Result checking.
- Result saving and after-treatment.
3. Results and Discussion
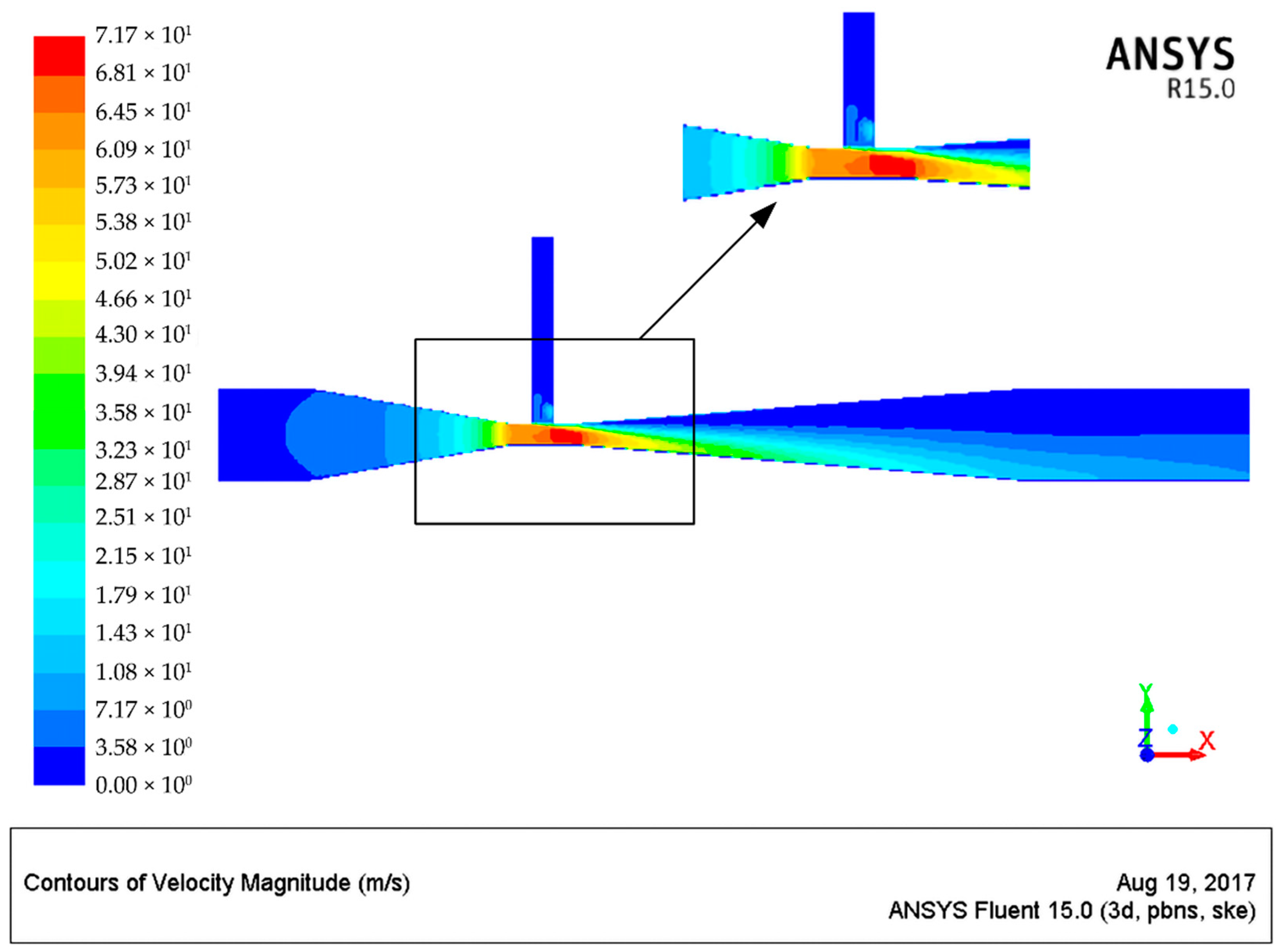
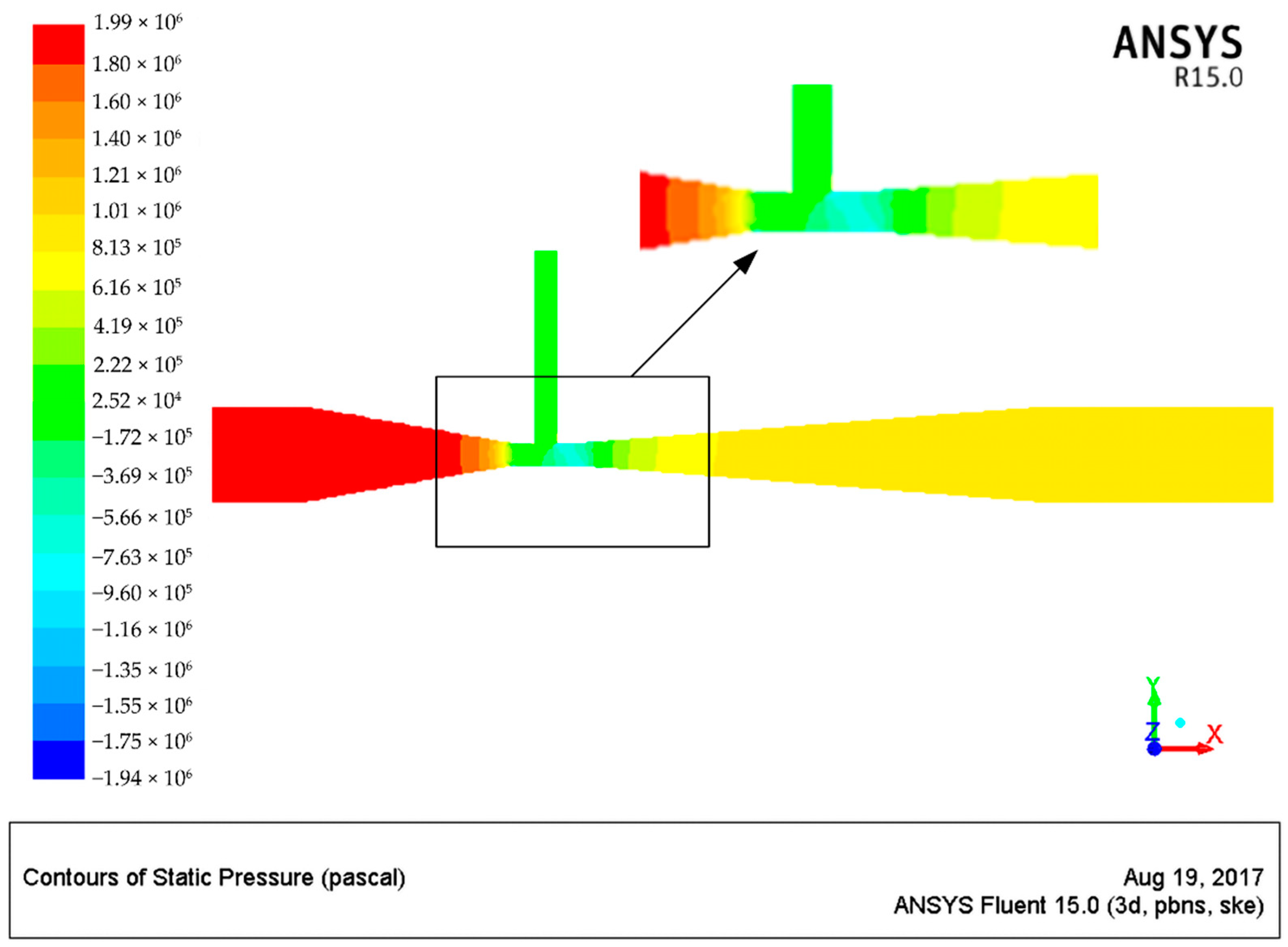
3.1. Analysis of Chemical Mixer Internal Flow Field
3.2. Orthogonal Experiment Results and Analysis
3.2.1. Orthogonal Experiment Data
3.2.2. Analysis on Orthogonal Experiment Variance
3.2.3. Determination of Comprehensive Optimal Level of Chemical Mixer Structure Parameters
3.2.4. Verification of Chemical Mixer Structure Parameter Comprehensive Optimal Level
4. Conclusions
- Single-index variance analysis results show that diffusion tube divergence angle β and Venturi diameter d are the two structure parameters with the most important influence among the three experiment evaluation indexes, and the constricted tube falloff angle α and Venturi length L are two structure parameters with secondary influence. When it is only considered that turbulent kinetic energy is the evaluation index, interaction influence of diffusion tube divergence angle β and Venturi diameter d plays the decisive role, and the influence of interactions under other circumstances are from respective principal factors.
- Four structure parameters of pesticide mixing apparatus have different optimal values under different evaluation indexes. Optimal pesticide mixing apparatus structure parameters include the following when aiming at lifting height evaluation indexes: constricted tube falloff angle is 20°, diffusion tube divergence angle is 7°, Venturi diameter is 3 mm, and Venturi length is 6 mm; optimal pesticide mixing apparatus structure parameters include the following when aiming at turbulent kinetic energy evaluation indexes: constricted tube falloff angle is 22°, diffusion tube divergence angle is 7°, Venturi diameter is 3 mm, Venturi length is 6 mm; optimal pesticide mixing apparatus structure parameters include the following when aiming at pressure recovery distance evaluation indexes: constricted tube falloff angle is 22°, diffusion tube divergence angle is 9°, Venturi diameter is 2 mm, and Venturi length is 10 mm.
- Analysis results of all evaluation indexes are comprehensively considered to finally conclude the following comprehensive optimal pesticide mixing apparatus structure parameters: constricted tube falloff angle is 22°, diffusion tube divergence angle is 9°, Venturi diameter is 2 mm, and Venturi length is 6 mm.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Y.; Wang, X.; Zheng, J.; Zhou, F. Simulation and experiment on agricultural chemical mixing process for direct injection system based on CFD. Trans. Chin. Soc. Agric. Eng. 2010, 26, 148–152. [Google Scholar]
- Li, J.; Jia, W.; Wei, X. On-line mixing pesticide device based on flow control valve and neural network. Trans. Chin. Soc. Agric. Mach. 2014, 45, 98–103. [Google Scholar]
- Slaughter, D.; Giles, D.; Tauzer, C. Precision offset spray system for roadway shoulder weed control. J. Transp. Eng. 1999, 125, 364–371. [Google Scholar] [CrossRef]
- Gillis, K.; Giles, D.; Slaughter, D.; Downey, D. Injection mixing system for boomless, target–activated herbicide spraying. Trans. ASAE 2003, 46, 997–1008. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, H.; Hong, T.; Zhang, W.; Zhu, Y.; Zhang, K. Key technology of variable-rate spraying system of online mixing pesticide. Trans. Chin. Soc. Agric. Mach. 2009, 40, 93–129. [Google Scholar]
- He, P.; Wu, C.; Chen, C.; Li, X.; Wang, G. Experimental Investigation on Safe Mixing Apparatus. China Saf. Sci. J. 2001, 4, 38–42. [Google Scholar]
- He, P.; Wu, C.; Chen, C.; Wang, G.; Li, X. Performance of a New Type Spraying mixing Apparatus. Trans. Chin. Soc. Agric. Mach. 2001, 3, 44–47. [Google Scholar]
- Peijie, H.; Cuiying, C.; Chundu, W.; Xuehui, L. Numerical computation of mixing pipe flow-field in jet mixing apparatus pesticide mixture. J. Jiangsu Univ. Nat. Sci. Ed. 2002, 23, 13–16. [Google Scholar]
- Li, Y.; Wu, C.; Fu, X. Experimental study on two-stage jet mixing apparatus. Trans. Chin. Soc. Agric. Eng. 2008, 1, 172–174. [Google Scholar]
- Qiu, B.; Xu, X.; Deng, B.; Yang, N.; Jiang, G.; Wu, C. Effect of area ratio on mixing homogeneity in jet-mixing apparatus. Trans. Chin. Soc. Agric. Mach. 2011, 42, 95–100. [Google Scholar]
- Qiu, B.; Xu, X.; Yang, N.; Deng, B.; Jiang, G.; Wu, C. Simulation analysis of structure parameters of jet-mixing apparatus on jet-mixing performance. Trans. Chin. Soc. Agric. Mach. 2011, 42, 70–69. [Google Scholar]
- Chen, Z.; Zhu, S.; Qiu, B. Online jet mixing control system of pesticide concentration. J. Drain. Irrig. Mach. Eng. 2012, 30, 463–468. [Google Scholar]
- Zhou, L.; Fu, X.; Xue, X. Design and experiment of jet mixing apparatus based on CFD. Trans. Chin. Soc. Agric. Mach. 2013, 44, 107–112. [Google Scholar]
- Ou, M.; Jia, W.; Qiu, B.; Guan, X.; Sheng, Y. Experiment and numerical analysis of flow field in jet mixing device under variable working conditions. Trans. Chin. Soc. Agric. Mach. 2015, 46, 107–111. [Google Scholar]
- Zhang, J.F.; Pang, X.B.; Liu, H.; Zhang, T.J.; Guo, X.; Zeng, F.C. Study on Proportional Control Experimental Platform of Online Jet Mixing Drug. Hubei Agric. Sci. 2016, 55, 2645–2648. [Google Scholar]
- Ghate, S.R.; Phatak, S. A compressed air direct injection pesticide sprayer. Appl. Eng. Agric. 1991, 7, 158–162. [Google Scholar] [CrossRef]
- Lin, M.; Zhao, G. Analysis for the security technology of chemical application in the plant protection mechinery from aborad. Trans. Chin. Soc. Agric. Mach. 1996, S1, 153–158. [Google Scholar]
- Koo, Y.M.; Sumner, H. Total flow control for a direct injection sprayer. Appl. Eng. Agric. 1998, 14, 363–367. [Google Scholar] [CrossRef]
- Steward, B.L.; Humburg, D. Modeling the raven scs-700 chemical injection system with carrier control with sprayer simulation. Trans. ASAE 2000, 43, 231–245. [Google Scholar] [CrossRef] [Green Version]
- Aissaoui, A.E.; Lebeau, F.; Destain, M.F. Development of an optical sensor to measure direct injection spraying system performance. VDI-Ber. 2007, 2001, 243–252. [Google Scholar]
- Luck, J.D.; Shearer, S.A.; Luck, B.D.; Payne, F.A. Evaluation of a rhodamine-WT dye/glycerin mixture as a tracer for testing direct injection systems for agricultural sprayers. Appl. Eng. Agric. 2012, 28, 643–646. [Google Scholar] [CrossRef]
- Felizardo, K.R.; Mercaldi, H.V.; Oliveira, V.A.; Cruvinel, P.E. Modeling and Predictive Control of a Variable-Rate Spraying System. In Proceedings of the 2013 8th EUROSIM Congress on Modelling and Simulation, Cardiff, UK, 10–13 September 2013; pp. 202–207. [Google Scholar]
- Endalew, A.M.; Debaer, C.; Rutten, N.; Vercammen, J.; Delele, M.A.; Ramon, H.; Nicolaï, B.; Verboven, P. A new integrated CFD modelling approach towards air-assisted orchard spraying. Part I. Model development and effect of wind speed and direction on sprayer airflow. Comput. Electron. Agric. 2010, 71, 128–136. [Google Scholar] [CrossRef]
- Wu, B. CFD simulation of gas mixing in anaerobic digesters. Comput. Electron. Agric. 2014, 109, 278–286. [Google Scholar] [CrossRef]
- Salcedo, R.; Granell, R.; Palau, G.; Vallet, A.; Garcerá, C.; Chueca, P.; Moltó, E. Design and validation of a 2D CFD model of the airflow produced by an airblast sprayer during pesticide treatments of citrus. Comput. Electron. Agric. 2015, 116, 150–161. [Google Scholar] [CrossRef]
- Zhou, L.; Zhou, L.; Xue, X.; Kong, W. Numerical analysis and test on cavitation of jet mixing apparatus. Trans. Chin. Soc. Agric. Eng. 2015, 31, 60–65. [Google Scholar]
- Devarrewaere, W.; Heimbach, U.; Foqué, D.; Nicolai, B.; Nuyttens, D.; Verboven, P. Wind tunnel and CFD study of dust dispersion from pesticide-treated maize seed. Comput. Electron. Agric. 2016, 128, 27–33. [Google Scholar] [CrossRef]
- Wang, H.; Shi, W.; Lu, W.; Zhou, L.; Wang, C. Optimization design of deep well pump based on latin square test. Trans. Chin. Soc. Agric. Mach. 2010, 41, 56–63. [Google Scholar]
- Gao, X.; Shi, W.; Zhang, D.; Zhang, Q.; Fang, B. Optimization design and test of vortex pump based on CFD orthogonal test. Trans. Chin. Soc. Agric. Mach. 2014, 45, 101–106. [Google Scholar]
- Ma, Y. Determination of Jet-type Pesticide Mixture Device. J. Yangling Vocat. Tech. Coll. 2014, 13, 31–33. [Google Scholar]
- Sheng, Y.; Qiu, B.; Chen, J. Mixing Characteristic Experiment of Different Area Ratio of Jet-mixing Apparatus. J. Agric. Mech. Res. 2016, 4, 134–140. [Google Scholar]
- Zhang, T.; Liang, J.; Xue, X. Numerical Simulation and Experimental Study of Internal Flow Field of the Jet Pesticide Mixer. Chin. Agric. Mech. 2011, 03, 63–67. [Google Scholar]
- Lei, X.; Liao, Y.; Liao, Q. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Song, H.; Xu, Y.; Zheng, J.; Zhu, H. Swirling jet mixture mechanism of fat-soluble pesticides and numerical simulation of mixer field. Trans. Chin. Soc. Agric. Mach. 2016, 47, 79–84. [Google Scholar]
- Li, H.; Rong, L.; Zong, C.; Zhang, G. Assessing response surface methodology for modelling air distribution in an experimental pig room to improve air inlet design based on computational fluid dynamics. Comput. Electron. Agric. 2017, 141, 292–301. [Google Scholar] [CrossRef]
- Dai, Q.; Hong, T.; Song, S.; Li, Z.; Chen, J. Influence of pressure and pore diameter on droplet parameters of hollow cone nozzle in pipeline spray. Trans. Chin. Soc. Agric. Eng. 2016, 32, 97–103. [Google Scholar]
- Lee, I.-B.; Bitog, J.P.P.; Hong, S.-W.; Seo, I.-H.; Kwon, K.-S.; Bartzanas, T.; Kacira, M. The past, present and future of CFD for agro-environmental applications. Comput. Electron. Agric. 2013, 93, 168–183. [Google Scholar] [CrossRef]
- Norton, T.; Grant, J.; Fallon, R.; Sun, D.-W. Improving the representation of thermal boundary conditions of livestock during CFD modelling of the indoor environment. Comput. Electron. Agric. 2010, 73, 17–36. [Google Scholar] [CrossRef]
- Li, H.; Rong, L.; Zhang, G. Study on convective heat transfer from pig models by CFD in a virtual wind tunnel. Comput. Electron. Agric. 2016, 123, 203–210. [Google Scholar] [CrossRef]
- Qiu, B.; Xu, X. Contrast and analysis between 2D and 3D flow field of jet-mixing apparatus. J. Drain. Irrig. Mach. Eng. 2011, 5, 441–445. [Google Scholar]
- Lu, H. Theory and Application of Spraying Technology; Wuhan University Press: Wuhan, China, 2004; ISBN 978-7-307-04074-8. [Google Scholar]
- Sun, H.; Wang, J. Design Manual for Flow Measurement Throttling Devices, 2nd ed.; Chemical Industry Press: Beijing, China, 2006; Volume 21. [Google Scholar]
- Song, H.; Xu, Y.; Zheng, J.; Dai, X. Structural parameters optimization of swirling jet mixer based on reducing effective length. Trans. Chin. Soc. Agric. Eng. 2018, 34, 62–69. [Google Scholar]
- Song, H.; Xu, Y.; Zheng, J.; Wang, X.; Zhang, M. Structural analysis and mixing uniformity experiments of swirling jet mixer for applying fat-soluble pesticides. Trans. Chin. Soc. Agric. Eng. 2016, 32, 86–92. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factor | |||
|---|---|---|---|---|
| A | B | C | D | |
| α/ (°) | β/ (°) | d/mm | L/mm | |
| 1 | 0.884 | 0.626 | 3.058 | 0.888 |
| 2 | 1.189 | 1.078 | 0.268 | 1.200 |
| 3 | 1.318 | 1.688 | 0.066 | 1.303 |
| Experiment Number | Column Number | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | AB1 | AB2 | C | BD2 | E1 | BC1 | D | E2 | BC2 | BD1 | E3 | |
| 1 | 2 | 2 | 3 | 2 | 3 | 2 | 3 | 1 | 1 | 3 | 1 | 1 | 3 |
| 2 | 1 | 2 | 1 | 3 | 3 | 3 | 3 | 2 | 3 | 2 | 2 | 1 | 1 |
| 3 | 2 | 1 | 3 | 3 | 1 | 3 | 1 | 3 | 2 | 2 | 3 | 1 | 3 |
| 4 | 3 | 2 | 2 | 1 | 3 | 1 | 3 | 3 | 2 | 1 | 3 | 1 | 2 |
| 5 | 3 | 2 | 1 | 3 | 2 | 1 | 1 | 3 | 1 | 3 | 2 | 2 | 3 |
| 6 | 2 | 2 | 2 | 1 | 2 | 2 | 1 | 1 | 3 | 2 | 3 | 2 | 1 |
| 7 | 2 | 3 | 2 | 3 | 1 | 1 | 3 | 2 | 2 | 3 | 1 | 2 | 1 |
| 8 | 1 | 1 | 3 | 3 | 3 | 1 | 2 | 1 | 3 | 3 | 3 | 2 | 2 |
| 9 | 3 | 1 | 1 | 1 | 3 | 2 | 2 | 2 | 2 | 2 | 1 | 2 | 3 |
| 10 | 1 | 3 | 3 | 1 | 1 | 2 | 3 | 3 | 1 | 2 | 2 | 2 | 2 |
| 11 | 3 | 3 | 1 | 2 | 1 | 3 | 3 | 1 | 3 | 1 | 3 | 2 | 3 |
| 12 | 2 | 2 | 1 | 3 | 1 | 2 | 2 | 1 | 2 | 1 | 2 | 3 | 2 |
| 13 | 2 | 3 | 1 | 2 | 3 | 1 | 1 | 2 | 1 | 2 | 3 | 3 | 2 |
| 14 | 1 | 2 | 2 | 1 | 1 | 3 | 2 | 2 | 1 | 3 | 3 | 3 | 3 |
| 15 | 1 | 1 | 2 | 2 | 2 | 1 | 3 | 1 | 2 | 2 | 2 | 3 | 3 |
| 16 | 2 | 1 | 1 | 1 | 2 | 3 | 3 | 3 | 3 | 3 | 1 | 3 | 2 |
| 17 | 3 | 1 | 3 | 3 | 2 | 2 | 3 | 2 | 1 | 1 | 3 | 3 | 1 |
| 18 | 3 | 3 | 2 | 3 | 2 | 3 | 2 | 1 | 1 | 2 | 1 | 1 | 2 |
| 19 | 1 | 3 | 2 | 3 | 3 | 2 | 1 | 3 | 3 | 1 | 1 | 3 | 3 |
| 20 | 2 | 3 | 3 | 1 | 2 | 1 | 2 | 2 | 3 | 1 | 2 | 1 | 3 |
| 21 | 1 | 2 | 3 | 2 | 2 | 3 | 1 | 2 | 2 | 1 | 1 | 2 | 2 |
| 22 | 3 | 2 | 3 | 2 | 1 | 1 | 2 | 3 | 3 | 2 | 1 | 3 | 1 |
| 23 | 2 | 1 | 2 | 2 | 3 | 3 | 2 | 3 | 1 | 1 | 2 | 2 | 1 |
| 24 | 1 | 3 | 1 | 2 | 2 | 2 | 2 | 3 | 2 | 3 | 3 | 1 | 1 |
| 25 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 26 | 3 | 1 | 2 | 2 | 1 | 2 | 1 | 2 | 3 | 3 | 2 | 1 | 2 |
| 27 | 3 | 3 | 3 | 1 | 3 | 3 | 1 | 1 | 2 | 3 | 2 | 3 | 1 |
| Experiment Number | Evaluation Indexes | ||
|---|---|---|---|
| Lifting Height H1/mm | Turbulent Kinetic Energy k/m2·s−2 | Pressure Recovery Distance H2/mm | |
| 1 | 0.07 | 302.45 | 24.97 |
| 2 | 0.06 | 279.09 | 24.81 |
| 3 | 1.88 | 239.12 | 17.62 |
| 4 | 0.05 | 292.47 | 24.68 |
| 5 | 0.24 | 266.51 | 20.57 |
| 6 | 0.20 | 239.33 | 20.58 |
| 7 | 4.84 | 287.50 | 15.02 |
| 8 | 0.05 | 316.23 | 25.72 |
| 9 | 0.05 | 315.28 | 25.63 |
| 10 | 3.58 | 281.30 | 15.21 |
| 11 | 5.27 | 285.64 | 14.83 |
| 12 | 3.05 | 266.88 | 16.16 |
| 13 | 0.10 | 299.32 | 24.70 |
| 14 | 2.41 | 265.10 | 16.30 |
| 15 | 0.17 | 228.03 | 22.20 |
| 16 | 0.13 | 270.18 | 21.96 |
| 17 | 0.17 | 290.23 | 21.94 |
| 18 | 0.44 | 272.16 | 19.61 |
| 19 | 0.08 | 249.28 | 24.43 |
| 20 | 0.38 | 242.90 | 19.56 |
| 21 | 0.26 | 232.11 | 20.84 |
| 22 | 3.36 | 265.35 | 15.98 |
| 23 | 0.05 | 330.57 | 25.81 |
| 24 | 0.42 | 244.15 | 19.87 |
| 25 | 0.93 | 233.11 | 17.71 |
| 26 | 2.20 | 240.78 | 17.47 |
| 27 | 0.08 | 267.00 | 24.31 |
| Variance Source | Quadratic Sum | DOF | Mean Square Error | F | p Value |
|---|---|---|---|---|---|
| A | 0.891 | 2 | 0.446 | 2.549 | 0.158 |
| B | 5.115 | 2 | 2.557 | 14.628 | 0.005 |
| C | 50.335 | 2 | 25.168 | 143.952 | 0.000 |
| D | 0.843 | 2 | 0.421 | 2.410 | 0.171 |
| A*B | 0.060 | 4 | 0.015 | 0.085 | 0.984 |
| B*C | 7.611 | 4 | 1.903 | 10.883 | 0.006 |
| B*D | 0.048 | 4 | 0.012 | 0.068 | 0.989 |
| error | 1.049 | 6 | 0.175 | ||
| Total | 65.951 | 26 |
| Level | Factor H1/mm | |||
|---|---|---|---|---|
| A | B | C | D | |
| 1 | 0.884 | 0.626 | 3.058 | 0.888 |
| 2 | 1.189 | 1.078 | 0.268 | 1.200 |
| 3 | 1.318 | 1.688 | 0.066 | 1.303 |
| Variance Source | Quadratic Sum | DOF | Mean Square Error | F | p Value |
|---|---|---|---|---|---|
| A | 1875.760 | 2 | 937.880 | 8.731 | 0.017 |
| B | 167.241 | 2 | 83.620 | 0.778 | 0.501 |
| C | 8244.767 | 2 | 4122.383 | 38.376 | 0.000 |
| D | 1913.082 | 2 | 956.541 | 8.905 | 0.016 |
| A*B | 107.812 | 4 | 26.953 | 0.251 | 0.899 |
| B*C | 7260.973 | 4 | 1815.243 | 16.898 | 0.002 |
| B*D | 443.888 | 4 | 110.972 | 1.033 | 0.462 |
| error | 644.527 | 6 | 107.421 | ||
| Total | 20,658.050 | 26 |
| Factor C Level | Factor B Level k/m2·s−2 | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| 1 | 237.670 | 265.777 | 284.813 |
| 2 | 262.813 | 245.983 | 253.070 |
| 3 | 320.693 | 291.337 | 271.867 |
| Level | Factor k/ m2·s−2 | |||
|---|---|---|---|---|
| A | B | C | D | |
| 1 | 258.711 | 273.726 | 262.753 | 282.306 |
| 2 | 275.361 | 267.699 | 253.956 | 263.616 |
| 3 | 277.269 | 269.917 | 294.632 | 265.420 |
| Variance Source | Quadratic Sum | DOF | Mean Square Error | F | p Value |
|---|---|---|---|---|---|
| A | 0.246 | 2 | 0.123 | 16.311 | 0.004 |
| B | 19.325 | 2 | 9.663 | 1282.019 | 0.000 |
| C | 344.774 | 2 | 172.387 | 22,872.018 | 0.000 |
| D | 0.126 | 2 | 0.063 | 8.380 | 0.018 |
| A*B | 0.004 | 4 | 0.001 | 0.122 | 0.969 |
| B*C | 1.558 | 4 | 0.389 | 51.676 | 0.000 |
| B*D | 0.014 | 4 | 0.004 | 0.474 | 0.755 |
| error | 0.045 | 6 | 0.008 | ||
| Total | 366.093 | 26 |
| Level Levels | Factor H2/mm | |||
|---|---|---|---|---|
| A | B | C | D | |
| 1 | 20.788 | 21.784 | 16.256 | 20.758 |
| 2 | 20.709 | 20.543 | 20.792 | 20.703 |
| 3 | 20.558 | 19.727 | 25.007 | 20.593 |
| Experiment Number | Evaluation Indexes | Comprehensive Score | ||
|---|---|---|---|---|
| Lifting Height H1/mm | Turbulent Kinetic Energy k/m2·s−2 | Pressure Recovery Distance H2/mm | ||
| 1 | 0.996 | 0.726 | 0.077 | 0.520 |
| 2 | 0.998 | 0.498 | 0.091 | 0.435 |
| 3 | 0.649 | 0.108 | 0.746 | 0.472 |
| 4 | 1.000 | 0.628 | 0.103 | 0.493 |
| 5 | 0.964 | 0.375 | 0.477 | 0.534 |
| 6 | 0.971 | 0.110 | 0.476 | 0.429 |
| 7 | 0.082 | 0.580 | 0.983 | 0.642 |
| 8 | 1.000 | 0.860 | 0.008 | 0.547 |
| 9 | 1.000 | 0.851 | 0.016 | 0.547 |
| 10 | 0.324 | 0.520 | 0.965 | 0.659 |
| 11 | 0.000 | 0.562 | 1.000 | 0.625 |
| 12 | 0.425 | 0.379 | 0.879 | 0.588 |
| 13 | 0.990 | 0.695 | 0.101 | 0.517 |
| 14 | 0.548 | 0.362 | 0.866 | 0.601 |
| 15 | 0.977 | 0.000 | 0.329 | 0.327 |
| 16 | 0.985 | 0.411 | 0.351 | 0.502 |
| 17 | 0.977 | 0.607 | 0.352 | 0.579 |
| 18 | 0.925 | 0.430 | 0.565 | 0.583 |
| 19 | 0.994 | 0.207 | 0.126 | 0.332 |
| 20 | 0.937 | 0.145 | 0.569 | 0.473 |
| 21 | 0.960 | 0.040 | 0.453 | 0.389 |
| 22 | 0.366 | 0.364 | 0.895 | 0.577 |
| 23 | 1.000 | 1.000 | 0.000 | 0.600 |
| 24 | 0.929 | 0.157 | 0.541 | 0.465 |
| 25 | 0.831 | 0.050 | 0.738 | 0.481 |
| 26 | 0.588 | 0.124 | 0.760 | 0.471 |
| 27 | 0.994 | 0.380 | 0.137 | 0.406 |
| 28 | 0.284 | 0.696 | 0.991 | 0.732 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, D.; Liu, W.; Li, Z.; Zhan, X.; Dai, Q.; Xue, X.; Song, S. Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment. Agronomy 2022, 12, 1059. https://doi.org/10.3390/agronomy12051059
Sun D, Liu W, Li Z, Zhan X, Dai Q, Xue X, Song S. Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment. Agronomy. 2022; 12(5):1059. https://doi.org/10.3390/agronomy12051059
Chicago/Turabian StyleSun, Daozong, Weikang Liu, Zhi Li, Xurui Zhan, Qiufang Dai, Xiuyun Xue, and Shuran Song. 2022. "Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment" Agronomy 12, no. 5: 1059. https://doi.org/10.3390/agronomy12051059
APA StyleSun, D., Liu, W., Li, Z., Zhan, X., Dai, Q., Xue, X., & Song, S. (2022). Numerical Experiment and Optimized Design of Pipeline Spraying On-Line Pesticide Mixing Apparatus Based on CFD Orthogonal Experiment. Agronomy, 12(5), 1059. https://doi.org/10.3390/agronomy12051059