
UAV Monitoring Topsoil Moisture in an Alpine Meadow on the Qinghai–Tibet Plateau
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
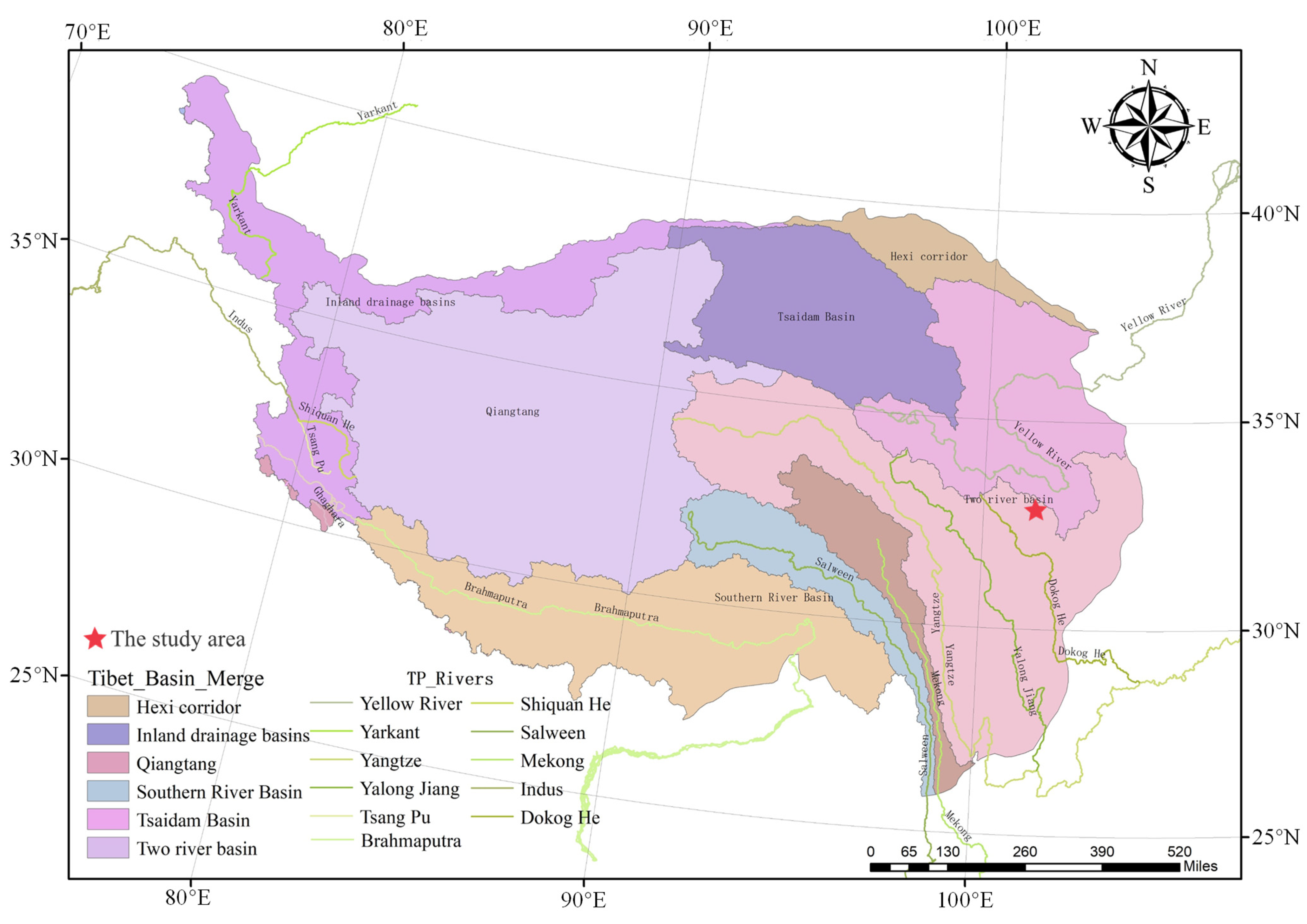
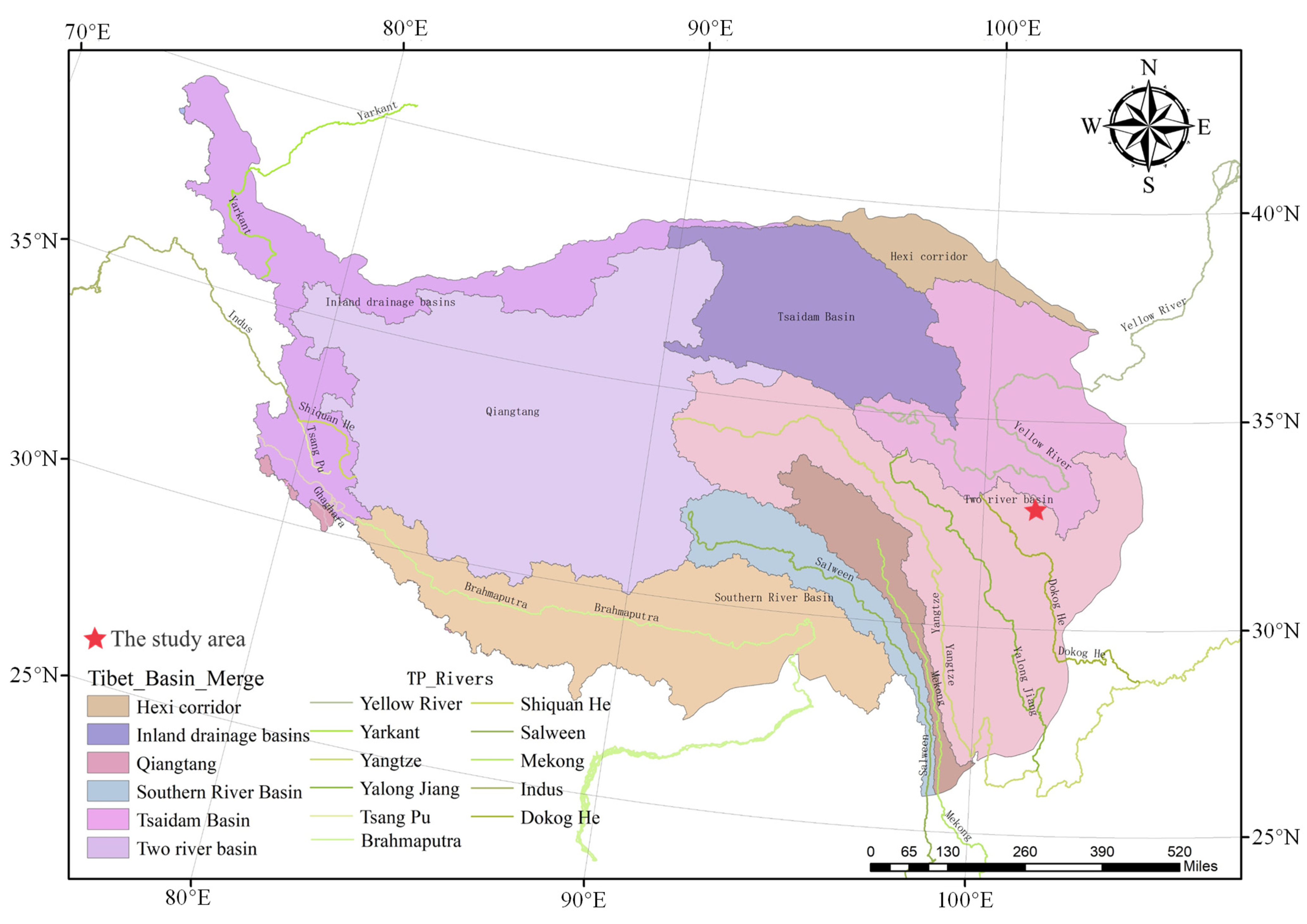
2.1. Study Area
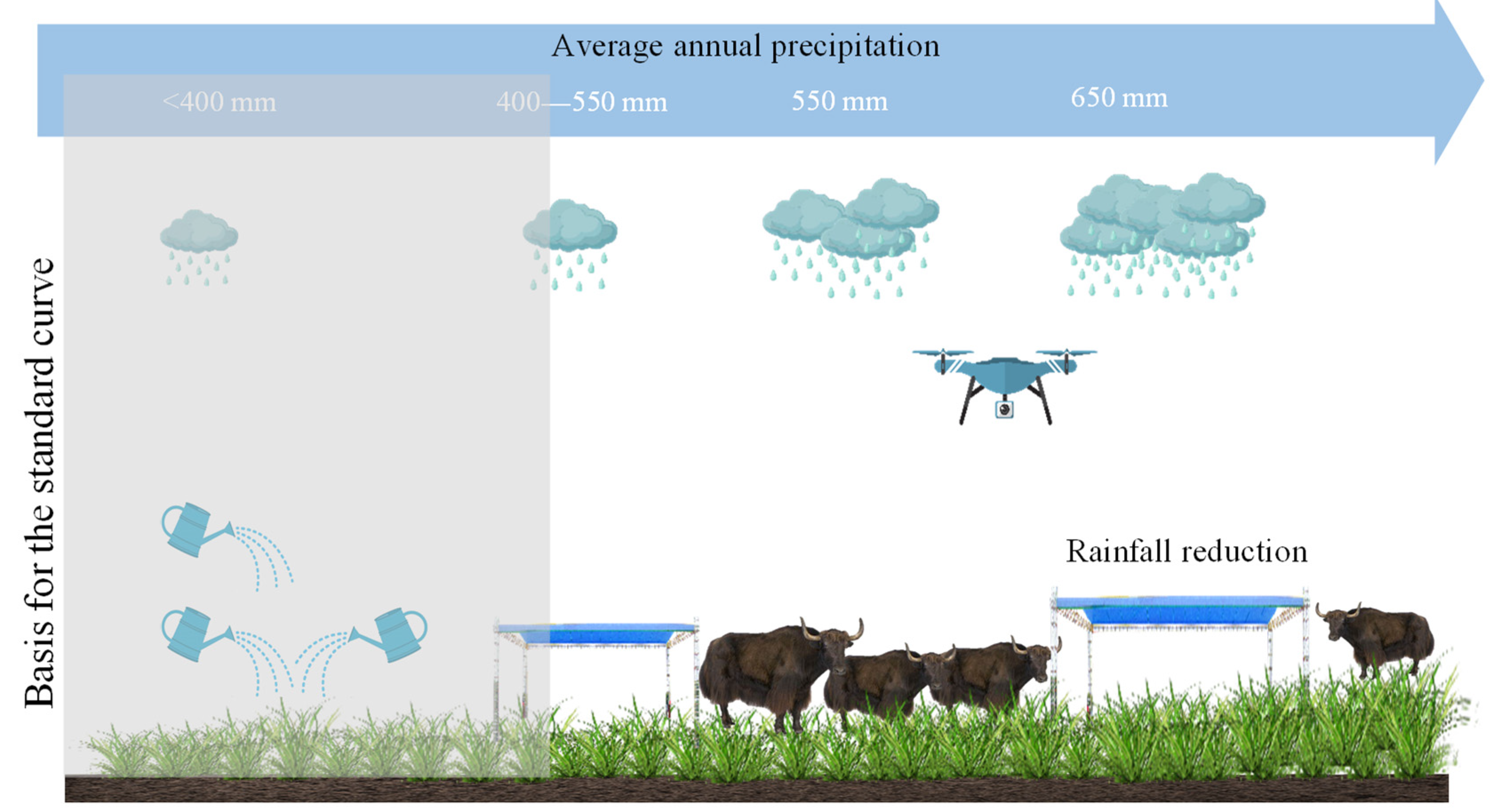
2.2. Experimental Design
2.2.1. Sample Plot Setup
2.2.2. Research Route
2.3. Acquisition of UAV Image Data
2.3.1. Set UAV Parameters
2.3.2. Image Acquisition
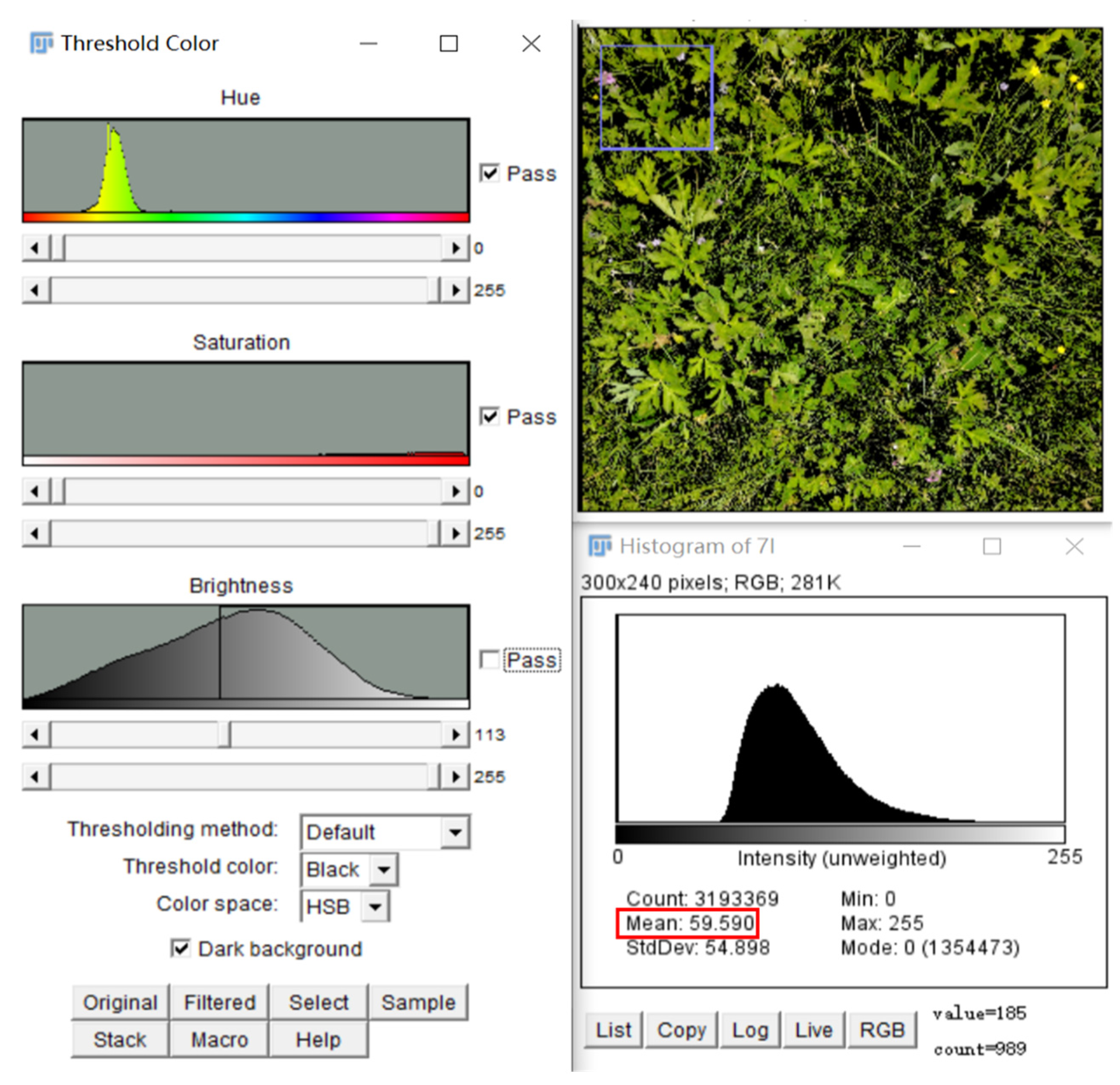
2.3.3. Image Acquisition of Vegetation Coverage
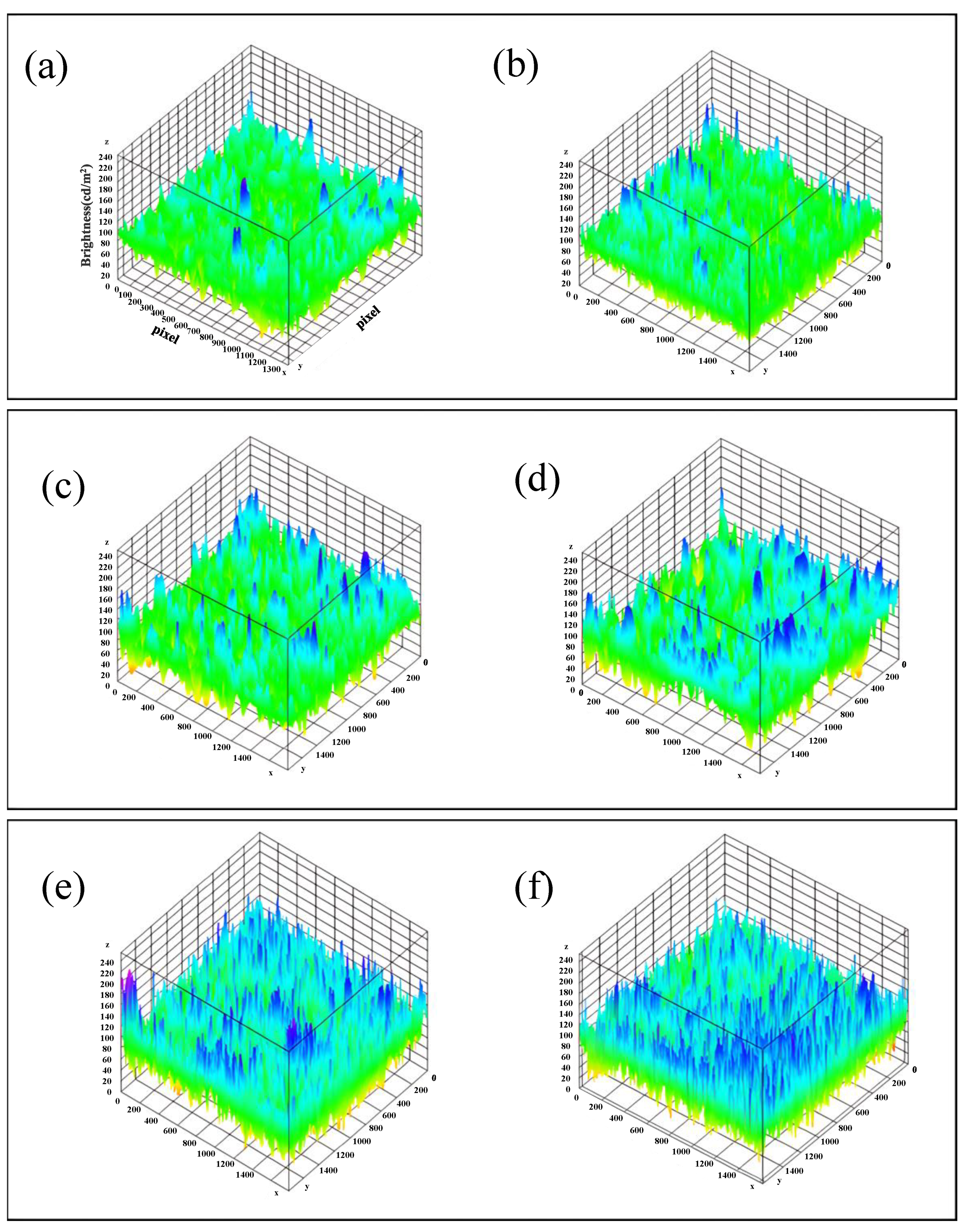
2.3.4. Acquisition of Brightness Value of Visible Light Image
2.3.5. Influence Factor Control and Error Calibration of Visible-Light Images
2.4. Statistical Analysis
2.5. Model Establishment for UAV Technology Assessment of the 0–10 cm Soil Moisture in an Alpine Meadow
2.6. Validation of the Practicality of the Estimation Model
3. Results
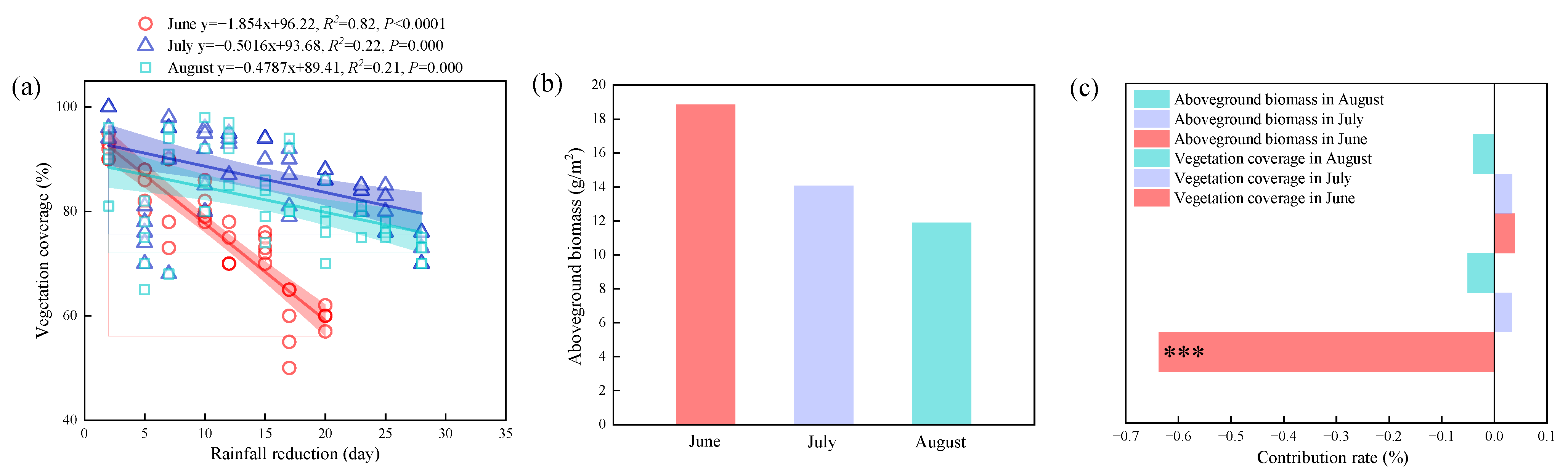
3.1. Effects of Rainfall Reduction on Vegetation Coverage and Aboveground Biomass
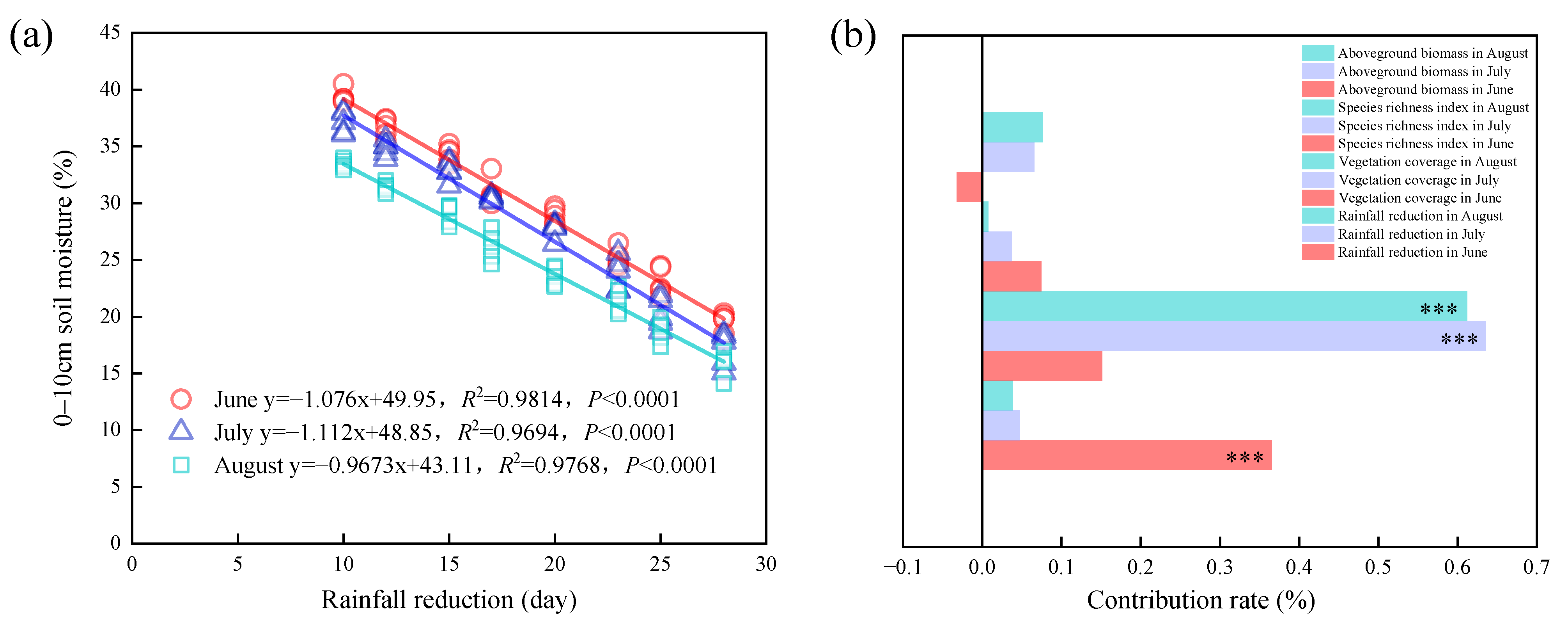
3.2. Effect of Rainfall Reduction on Topsoil Moisture
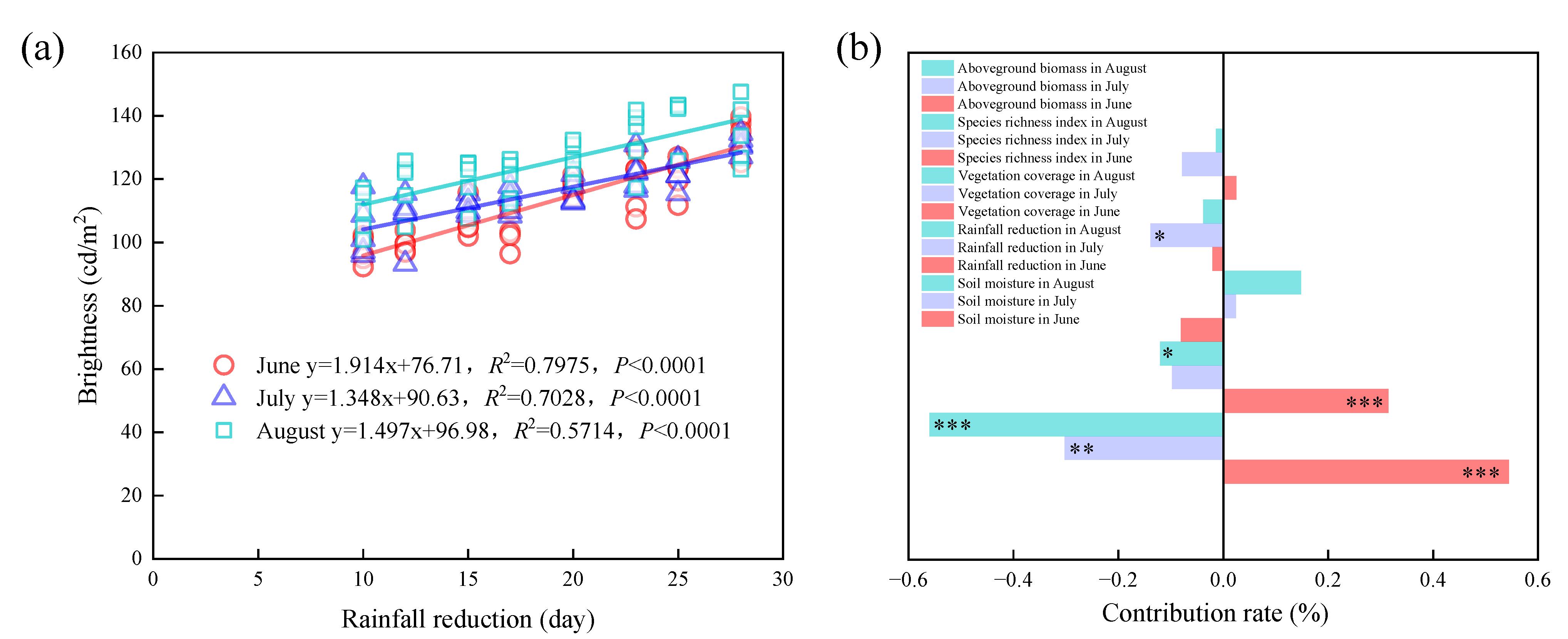
3.3. The Effect of Rainfall Reduction on Brightness
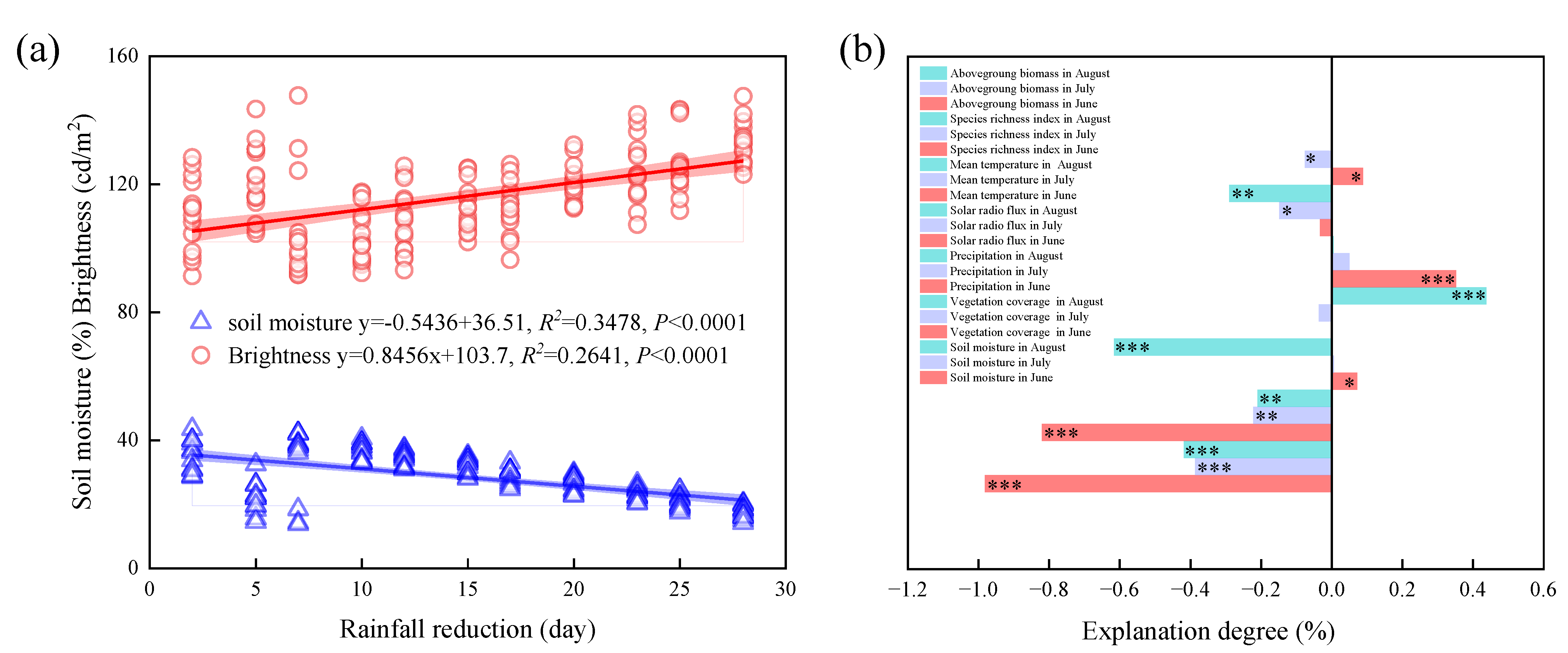
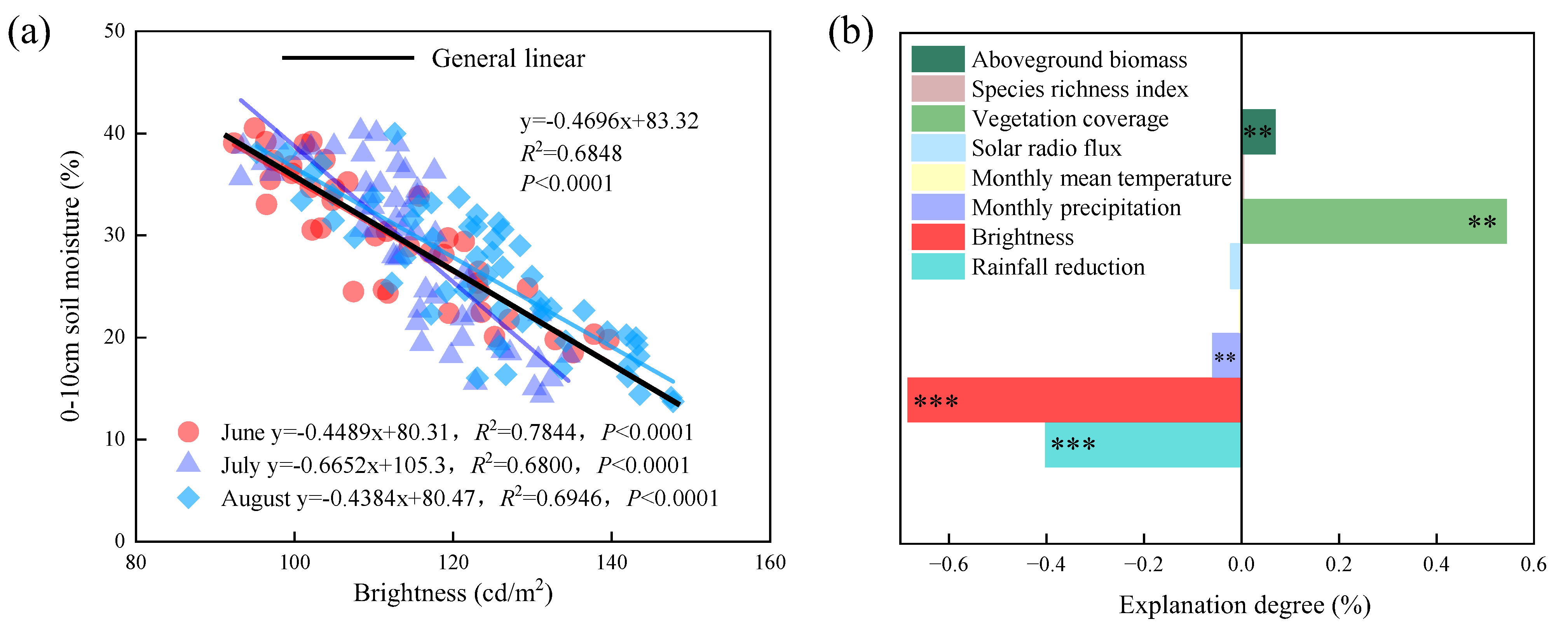
3.4. Effect of Rainfall Reduction on Soil Moisture-Brightness Relationship
3.5. Model and Calibration of UAV Monitoring Soil Moisture
3.5.1. A General Linear Model for Predicting Soil Moisture According to Visible-Light Brightness
3.5.2. Calibration of General Linear Models
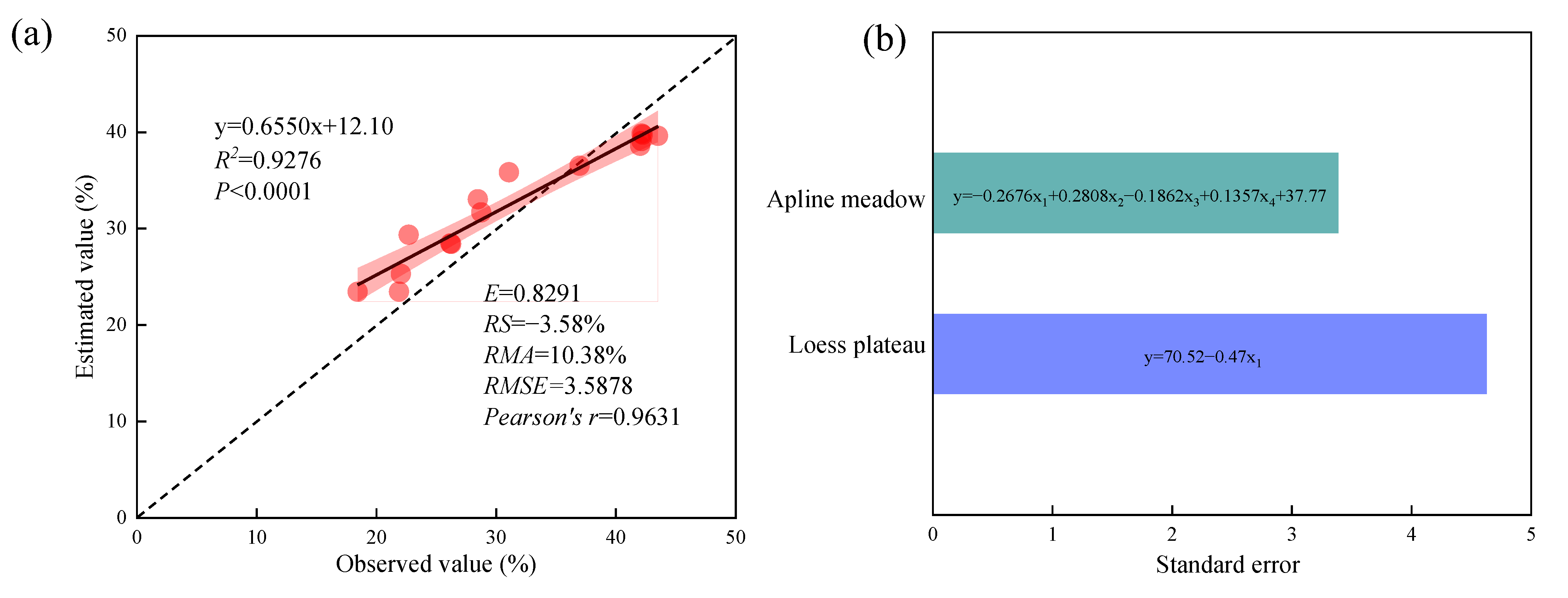
3.5.3. Verification of Mixed Linear Model
3.5.4. Model Application
4. Discussion
4.1. Effect of Rainfall Reduction on Vegetation-Soil Moisture and Visible Light Brightness
4.2. Applicability of Soil Moisture Model at Different Time Scales
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bai, Y.; Zhao, Y.; Wang, Y.; Zhou, K. Assessment of Ecosystem Services and Ecological Regionalization of Grasslands Support Establishment of Ecological Security Barriers in Northern China. BCAS 2020, 35, 3. [Google Scholar] [CrossRef]
- White, S.R.; Carlyle, C.N.; Fraser, L.H.; Cahill, J.F. Climate change experiments in temperate grasslands: Synthesis and future directions. Biol. Lett. 2012, 8, 484–487. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Liu, Y.; Zhao, J.; Chang, X.; Martin, W.D.; Sun, J.; Manuel, L.V.; Roberto, G.R.; Jose, A.G.; Zhou, H.; et al. SOC changes were more sensitive in alpine grasslands than in temperate grasslands during grassland transformation in China: A meta-analysis. J. Clean. Prod. 2021, 308, 127430. [Google Scholar] [CrossRef]
- Hayashi, M.; Jackson, J.; Xu, L. Application of the Versatile Soil Moisture Budget Model to Estimate Evaporation from Prairie Grassland. Can. Water Resour. J. 2010, 35, 187–208. [Google Scholar] [CrossRef]
- Xiao, X.; Song, N.; Xie, T.; Wang, X.; Yang, M. Spatial and temporal characteristics of soil moisture in different land use types in desert grassland areas. J. Ecol. Rural Environ. 2013, 29, 478–482. [Google Scholar] [CrossRef]
- Bradford, J.B.; Schlaepfer, D.R.; Lauenroth, W.K.; Burke, I.C. Shifts in plant functional types have time-dependent and regionally variable impacts on dryland ecosystem water balance. J. Ecol. 2014, 102, 1408–1418. [Google Scholar] [CrossRef]
- Lu, F.; Ade, L.; Chang, Y.; Hou, F. Relationship between soil moisture and vegetation cover in Qilian Mountain alpine steppe. Acta Prataculturae Sin. 2020, 29, 23–32. [Google Scholar] [CrossRef]
- Ueno, K.; Takano, S.; Kusaka, H. Nighttime Precipitation Induced by a Synoptic-scale Convergence in the Central Tibetan Plateau. J. Meteorol. Soc. Jpn. 2009, 87, 459–472. [Google Scholar] [CrossRef]
- Rasheed, M.W.; Tang, J.; Sarwar, A.; Shah, S.; Saddique, N.; Khan, M.U.; Khan, M.I.; Nawaz, S.; Shamshiri, R.R.; Aziz, M.; et al. Soil Moisture Measuring Techniques and Factors Affecting the Moisture Dynamics: A Comprehensive Review. Sustainability 2022, 14, 11538. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, L.; Zhang, X.; Yu, Y.; Jin, Z.; Lin, H.; Chen, Y.; Zhou, W.; An, Z. Exploring the role of land restoration in the spatial patterns of deep soil water at watershed scales. Catena 2019, 172, 387–396. [Google Scholar] [CrossRef]
- He, M.; Wang, Y.; Tong, Y.; Zhao, Y.; Qiang, X.; Song, Y.; Wang, L.; Song, Y.; Wang, G.; He, C. Evaluation of the environmental effects of intensive land consolidation: A field-based case study of the Chinese Loess Plateau. Land Use Policy 2020, 97, 104523. [Google Scholar] [CrossRef]
- Dobriyal, P.; Qureshi, A.; Badola, R.; Hussain, S.A. A review of the methods available for estimating soil moisture and its implications for water resource management. J. Hydrol. 2021, 458–459, 110–117. [Google Scholar] [CrossRef]
- Chung, C.; Lin, C.; Yang, S.; Lin, J.; Lin, C. Investigation of non-unique relationship between soil electrical conductivity and water content due to drying-wetting rate using TDR. Eng. Geol. 2019, 252, 54–64. [Google Scholar] [CrossRef]
- Hottenstein, J.D.; Ponce-Campos, G.E.; Moguel-Yanes, J.; Moran, M.S. Impact of Varying Storm Intensity and Consecutive Dry Days on Grassland Soil Moisture. J. Hydrometeorol. 2015, 16, 106–117. [Google Scholar] [CrossRef]
- Rahimzadeh-Bajgiran, P.; Berg, A.A.; Champagne, C.; Omasa, K. Estimation of soil moisture using optical/thermal infrared remote sensing in the Canadian Prairies. ISPRS J. Photogramm. Remote Sens. 2013, 83, 94–103. [Google Scholar] [CrossRef]
- McGuirk, S.L.; Cairns, I.H. Soil moisture prediction with multispectral visible and NIR remote sensing. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, V-3-2022, 447–453. [Google Scholar] [CrossRef]
- Wang, X.; Wang, M.; Wang, S.; Wu, Y. Extraction of vegetation information from visible unmanned aerial vehicle images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–158. [Google Scholar] [CrossRef]
- Deng, J.; Ren, G.; Lan, Y.; Huang, H.; Zhang, Y. Low altitude unmanned aerial vehicle remote sensing image processing based on visible band. J. South China Agric. Univ. 2016, 37, 16–22. [Google Scholar] [CrossRef]
- Mao, Z.; Deng, L.; He, Y.; Hao, X.; Yan, Y. Vegetation index for visible-light true-color image using hue and lightness color channels. J. Image Graph. 2017, 22, 1602–1610. [Google Scholar]
- Zanetti, S.S.; Cecilio, R.A.; Alves, E.G.; Silva, V.H.; Sousa, E.F. Estimation of the moisture content of tropical soils using color images and artificial neural networks. Catena 2015, 135, 100–106. [Google Scholar] [CrossRef]
- Dos Santos, J.F.C.; Silva, H.R.F.; Pinto, F.A.C.; de Assis, I.R. Use of digital images to estimate soil moisture. Rev. Bras. Eng. Agric. Ambient. 2016, 20, 1051–1056. [Google Scholar] [CrossRef]
- Putra, A.N.; Nita, I. Reliability of using high-resolution aerial photography (red, green and blue bands) for detecting available soil water in agricultural land. J. Degrad. Min. Lands Manag. 2020, 7, 2221–2232. [Google Scholar] [CrossRef]
- Sun, Y.; Yi, S.; Hou, F. Unmanned aerial vehicle methods makes species composition monitoring easier in grasslands. Ecol. Indic. 2018, 95, 825–830. [Google Scholar] [CrossRef]
- Sun, Y.; Yuan, Y.; Luo, Y.; Ji, W.; Bian, Q.; Zhu, Z.; Wang, J.; Qin, Y.; He, X.; Li, M.; et al. An Improved Method for Monitoring Multiscale Plant Species Diversity of Alpine Grassland Using UAV: A Case Study in the Source Region of the Yellow River, China. Front. Plant Sci. 2022, 13, 905715. [Google Scholar] [CrossRef]
- Pang, G.; Chen, D.; Wang, X.; Lai, H. Spatiotemporal variations of land surface albedo and associated influencing factors on the Tibetan Plateau. Sci. Total Environ. 2022, 804, 150100. [Google Scholar] [CrossRef] [PubMed]
- Saravanan, C. Color Image to Grayscale Image Conversion. In Proceedings of the 2010 Second International Conference on Computer Engineering and Applications (ICCEA), Bali, Indonesia, 19–21 March 2010; pp. 196–199. [Google Scholar] [CrossRef]
- Xiao, X.; Li, D.; An, Y.; Ma, Z.; Wu, Z.; Peng, Z.; Hou, F. Plant community characteristics of grazing grassland in a deer farm in summer. Pratacultural Sci. 2019, 36, 1693–1705. [Google Scholar]
- Piao, S.; Wang, X.; Park, T.; Chen, C.; Lian, X.; He, Y.; Bjerke, J.; Chen, A.; Ciais, P.; Tommervik, H.; et al. Characteristics, drivers and feedbacks of global greening. Nat. Rev. Earth Environ. 2020, 1, 14–27. [Google Scholar] [CrossRef]
- Feldman, A.F.; Gianotti, D.J.S.; Trigo, I.F.; Salvucci, G.D.; Entekhabi, D. Land-Atmosphere Drivers of Landscape-Scale Plant Water Content Loss. Geophys. Res. Lett. 2020, 47, e2020GL090331. [Google Scholar] [CrossRef]
- Lyu, X.; Li, X.; Dang, D.; Dou, H.; Wang, K.; Lou, A. Unmanned Aerial Vehicle (UAV) Remote Sensing in Grassland Ecosystem Monitoring: A Systematic Review. Remote Sens. 2022, 14, 1096. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Q.; Zhao, L.; Wu, X.; Yue, G.; Zou, D.; Nan, Z.; Liu, G.; Pang, Q.; Fang, H.; et al. Mapping the vegetation distribution of the permafrost zone on the Qinghai-Tibet Plateau. J. Mt. Sci. 2016, 13, 1035–1046. [Google Scholar] [CrossRef]
- Okin, G.S.; Sala, O.E.; Vivoni, E.R.; Zhang, J.; Bhattachan, A. The Interactive Role of Wind and Water in Functioning of Drylands: What Does the Future Hold? Bioscience 2018, 68, 670–677. [Google Scholar] [CrossRef]
- Lu, F.; Sun, Y.; Hou, F. Using UAV Visible Images to Estimate the Soil Moisture of Steppe. Water 2020, 12, 2334. [Google Scholar] [CrossRef]
- Kang, B.T.; Bowatte, S.; Hou, F. Soil microbial communities and their relationships to soil properties at different depths in an alpine meadow and desert grassland in the Qilian mountain range of China. J. Arid Environ. 2020, 184, 104316. [Google Scholar] [CrossRef]
- Guo, N.; Wang, A.; Degen, A.A.; Deng, B.; Shang, Z.; Ding, L.; Long, R. Grazing exclusion increases soil CO2 emission during the growing season in alpine meadows on the Tibetan Plateau. Atmos. Environ. 2018, 174, 92–98. [Google Scholar] [CrossRef]
- Ma, Z.; Li, L.; Zhou, Q.; Hou, F. Litter manipulation enhances plant community heterogeneity via distinct mechanisms: The role of distribution patterns of plant functional composition and niche breadth variability. J. Environ. Manag. 2022, 320, 115877. [Google Scholar] [CrossRef] [PubMed]
- Quinaia, T.L.S.; Valle, R.F.; Coelho, V.P.M.; Cunha, R.C.; Valera, C.A.; Fernandes, L.F.S.; Pacheco, F.A.L. Application of an improved vegetation index based on the visible spectrum in the diagnosis of degraded pastures: Implications for development. Land Degrad. Dev. 2021, 32, 4693–4707. [Google Scholar] [CrossRef]
- Zhou, G.; Liu, S. Estimating ground fractional vegetation cover using the double- exposure method. Int. J. Remote Sens. 2015, 36, 6085–6100. [Google Scholar] [CrossRef]
- Gianelle, D.; Vescovo, L. Determination of green herbage ratio in grasslands using spectral reflectance. Methods and ground measurements. Int. J. Remote Sens. 2007, 28, 931–942. [Google Scholar] [CrossRef]
- Qiu, Y.; Fu, B.; Wang, J.; Chen, L.; Meng, Q.; Zhang, Y. Spatial prediction of soil moisture content using multiple linear regressions in a gully catchment of the Loess Plateau, China. J. Arid Environ. 2010, 74, 208–220. [Google Scholar] [CrossRef]
- Griffiths, R.P.; Gray, A.N.; Spies, T.A. Soil Properties in Old-growth Douglas-Fir Forest Gaps in the Western Cascade Mountains of Oregon. Northwest Sci. 2010, 84, 33–45. [Google Scholar] [CrossRef]
- Fu, Y.; Taneja, P.; Lin, S.; Ji, W.; Adamchuk, V.; Daggupati, P.; Biswas, A. Predicting soil organic matter from cellular phone images under varying soil moisture. Geoderma 2020, 361, 114020. [Google Scholar] [CrossRef]
- Abudureheman, B.; Liu, H.L.; Zhang, D.Y.; Guan, K.Y.; Zhang, Y.K. The Responses of the Quantitative Characteristics of a Ramet Population of the Ephemeroid Rhizomatous Sedge Carex physodes to the Moisture Content of the Soil in Various Locations on Sand Dunes. Sci. World J. 2014, 2014, 120186. [Google Scholar] [CrossRef] [PubMed]
- Bai, W.; Chen, X.; Tang, Y.; He, Y.; Zheng, Y. Temporal and spatial changes of soil moisture and its response to temperature and precipitation over the Tibetan Plateau. Hydrol. Sci. J. 2019, 64, 1370–1384. [Google Scholar] [CrossRef]
- Wang, G.; Li, S.; Hu, H.; Li, Y. Water regime shifts in the active soil layer of the Qinghai-Tibet Plateau permafrost region, under different levels of vegetation. Geoderma 2009, 149, 280–289. [Google Scholar] [CrossRef]
- El Sharnouby, M.E.; Azab, E.; Alotaibi, S.S.; Saleh, D. Influence of air temperature and soil moisture on growth and chemical composition of geranium plants. Pak. J. Bot. 2019, 51, 97–102. [Google Scholar] [CrossRef]
- Zhang, D.; Li, X.; Zhang, F.; Zhang, Z.; Chen, Y. Effects of rainfall intensity and intermittency on woody vegetation cover and deep soil moisture in dryland ecosystems. J. Hydrol. 2016, 543, 270–282. [Google Scholar] [CrossRef]
- Youn, W.B.; Hernandez, J.O.; Park, B.B. Effects of Shade and Planting Methods on the Growth of Heracleum moellendorffii and Adenophora divaricata in Different Soil Moisture and Nutrient Conditions. Plants 2021, 10, 2203. [Google Scholar] [CrossRef]
- Dai, L.; Fu, R.; Guo, X.; Du, Y.; Zhang, F.; Cao, G. Soil Moisture Variations in Response to Precipitation Across Different Vegetation Types on the Northeastern Qinghai-Tibet Plateau. Front. Plant Sci. 2022, 13, 854152. [Google Scholar] [CrossRef]
- Schwarz, M.; Folini, D.; Yang, S.; Allan, R.P.; Wild, M. Changes in atmospheric shortwave absorption as important driver of dimming and brightening. Nat. Geosci. 2020, 13, 110–115. [Google Scholar] [CrossRef]
- Wang, X.; Yi, S.; Wu, Q.; Yang, K.; Ding, Y. The role of permafrost and soil water in distribution of alpine grassland and its NDVI dynamics on the Qinghai-Tibetan Plateau. Glob. Planet. Change 2016, 147, 40–53. [Google Scholar] [CrossRef]
- Fedoro, A.N.; Konstantinov, P.Y.; Vasilyev, N.F.; Shestakova, A.A. The influence of boreal forest dynamics on the current state of permafrost in Central Yakutia. Polar Sci. 2019, 22, 100483. [Google Scholar] [CrossRef]
- Sahay, A.; Chen, M. Leaf Analysis for Plant Recognition. In Proceedings of the 2016 7th IEEE International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 26–28 August 2016; pp. 914–917. [Google Scholar] [CrossRef]
- Fan, L.; Ketzer, B.; Liu, H.; Bernhofer, C. Grazing effects on seasonal dynamics and interannual variabilities of spectral reflectance in semi-arid grassland in Inner Mongolia. Plant Soil 2011, 340, 169–180. [Google Scholar] [CrossRef]
- Thompson, D.R.; Guanter, L.; Berk, A.; Gao, B.C.; Richter, R.; Schlapfer, D.; Thome, K.J. Retrieval of Atmospheric Parameters and Surface Reflectance from Visible and Shortwave Infrared Imaging Spectroscopy Data. Surv. Geophys. 2019, 40, 333–360. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Lyu, S.; Shang, L.; Su, Y.; Zhu, H. Radiation balance and the response of albedo to environmental factors above two alpine ecosystems in the eastern Tibetan Plateau. Sci. Cold Arid Reg. 2017, 9, 142–150. [Google Scholar]
- Liou, Y.A.; Chen, K.; Wu, T. Reanalysis of L-band brightness predicted by the LSP/R model for prairie grassland: Incorporation of rough surface scattering. IEEE Trans. Geosci. Remote Sens. 2001, 39, 129–135. [Google Scholar] [CrossRef]
- Liu, Z.; Shao, Q.; Tao, J.; Chi, W. Intra-annual variability of satellite observed surface albedo associated with typical land cover types in China. J. Geogr. Sci. 2015, 25, 35–44. [Google Scholar] [CrossRef]
- Bayat, B.; van der Tol, C.; Verhoef, W. Remote Sensing of Grass Response to Drought Stress Using Spectroscopic Techniques and Canopy Reflectance Model Inversion. Remote Sens. 2016, 8, 557. [Google Scholar] [CrossRef]
- Fawcett, D.; Panigada, C.; Tagliabue, G.; Boschetti, M.; Celesti, M.; Evdokimov, A.; Biriukova, K.; Colombo, R.; Miglietta, F.; Rascher, U.; et al. Multi-Scale Evaluation of Drone-Based Multispectral Surface Reflectance and Vegetation Indices in Operational Conditions. Remote Sens. 2020, 12, 514. [Google Scholar] [CrossRef]
- Alexandra, B.; Luigi, M.; Brunella, M.; Luca, C.G.; Stefano, P.; Giulia, M.D.; Gerardo, L. High Levels of Shading as a Sustainable Application for Mitigating Drought, in Modern Apple Production. Agronomy 2021, 11, 422. [Google Scholar] [CrossRef]
- Henke, M.; Gladilin, E. Virtual Laser Scanning Approach to Assessing Impact of Geometric Inaccuracy on 3D Plant Traits. Remote Sens. 2022, 14, 4727. [Google Scholar] [CrossRef]
- Chai, J.; Yu, X.; Xu, C.; Xiao, H.; Zhang, J.; Yang, H.; Pan, T. Effects of yak and Tibetan sheep trampling on soil properties in the northeastern Qinghai-Tibetan Plateau. Appl. Soil Ecol. 2019, 144, 147–154. [Google Scholar] [CrossRef]
- Bell, L.W.; Kirkegaard, J.A.; Swan, A.; Hunt, J.R.; Huth, N.I.; Fettell, N.A. Impacts of soil damage by grazing livestock on crop productivity. Soil Tillage Res. 2011, 113, 19–29. [Google Scholar] [CrossRef]
- Dai, L.; Fu, R.; Guo, X.; Ke, X.; Du, Y.; Zhang, F.; Cao, G. Effect of grazing management strategies on alpine grassland on the northeastern Qinghai-Tibet Plateau. Ecol. Eng. 2021, 173, 106418. [Google Scholar] [CrossRef]
- Doepper, V.; Rocha, A.D.; Berger, K.; Graenzig, T.; Verrelst, J.; Kleinschmit, B.; Foerster, M. Estimating soil moisture content under grassland with hyperspectral data using radiative transfer modelling and machine learning. Int. J. Appl. Earth Obs. Geoinf. 2022, 110, 102817. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera Specification | Parameter Value | Camera Specification | Parameter Value |
|---|---|---|---|
| Image sensor | 1/2-inch CMOS | Aperture | f/2.8 |
| Lens perspective | FOV 84° | ISO | 500 |
| Photo size | 8000 × 6000 pixels | Shutters | 1/320 s |
| Image format | JPEG | Equivalent focal length | 24 mm |
| Factors | Prediction Model | R2 | P | PSI |
|---|---|---|---|---|
| Brightness(x1) | y = −0.4696x1 + 83.32 | 0.6848 | <0.0001 | 0.0234 |
| Brightness(x1) × Vegetation coverage(x2) | y = −0.3424x1 + 0.2794x2 + 45.45 | 0.7930 | <0.0001 | 0.0064 |
| Brightness(x1) × Vegetation coverage(x2) × Rainfall reduction(x3) | y = −0.3207x1 + 0.2134x2 − 0.1858x3 + 51.28 | 0.8181 | <0.0001 | 0.0135 |
| Brightness(x1) × Vegetation coverage(x2) × Rainfall reduction(x3) × Aboveground biomass(x4) | y = −0.2676x1 + 0.2808x2 − 0.1862x3 + 0.1357x4 + 37.77 | 0.8610 | <0.01 | 0.0125 |
| Brightness(x1) × Vegetation coverage(x2) × rainfall reduction(x3) × Aboveground biomass(x4) ×Monthly precipitation(x5) | y = −0.2721x1 + 0.3070x2 − 0.1570x3 + 0.1400x4 + 0.0131x5 + 33.71 | 0.8657 | — | |
| Brightness(x1) × Vegetation coverage(x2) × Rainfall reduction(x3) × Aboveground biomass(x4) ×Monthly precipitation(x5) × Monthly mean temperature(x6) | y = −0.2726x1 + 0.3037x2 − 0.1616x3 + 0.1407x4 + 0.0125x5 + 0.0703x6 + 33.36 | 0.8659 | — | |
| Brightness(x1) × Vegetation coverage(x2) × Rainfall reduction(x3) × Aboveground biomass(x4) × Monthly precipitation(x5) × Monthly mean temperature(x6) × Solar radio flux(x7) | y = −0.2735x1 + 0.3147x2 − 0.1635x3 + 0.1361x4 + 0.0140x5 + 0.0557x6 + 0.0552x7 − 5.174 | 0.8672 | — | |
| Brightness(x1) × Vegetation coverage(x2) × Rainfall reduction(x3) × Aboveground biomass(x4) × Monthly precipitation(x5) × Monthly mean temperature(x6) × Solar radio flux(x7) × Species richness index(x8) | y = −0.2131x1 + 0.4277x2 − 0.1311x3 + 0.0646x4 + 0.0003x5 + 0.0642x6 − 0.0289x7 − 0.03x8 + 35.51 | 0.8762 | — |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, Y.; Yu, S.; Lu, F.; Sun, Y.; Wang, S.; Ade, L.; Hou, F. UAV Monitoring Topsoil Moisture in an Alpine Meadow on the Qinghai–Tibet Plateau. Agronomy 2023, 13, 2193. https://doi.org/10.3390/agronomy13092193
Sang Y, Yu S, Lu F, Sun Y, Wang S, Ade L, Hou F. UAV Monitoring Topsoil Moisture in an Alpine Meadow on the Qinghai–Tibet Plateau. Agronomy. 2023; 13(9):2193. https://doi.org/10.3390/agronomy13092193
Chicago/Turabian StyleSang, Yazhuan, Shangzhao Yu, Fengshuai Lu, Yi Sun, Shulin Wang, Luji Ade, and Fujiang Hou. 2023. "UAV Monitoring Topsoil Moisture in an Alpine Meadow on the Qinghai–Tibet Plateau" Agronomy 13, no. 9: 2193. https://doi.org/10.3390/agronomy13092193