
Research on Soil Pesticide Residue Detection Using an Electronic Nose Based on Hybrid Models

Abstract
:1. Introduction
2. Experimental Materials and Methods
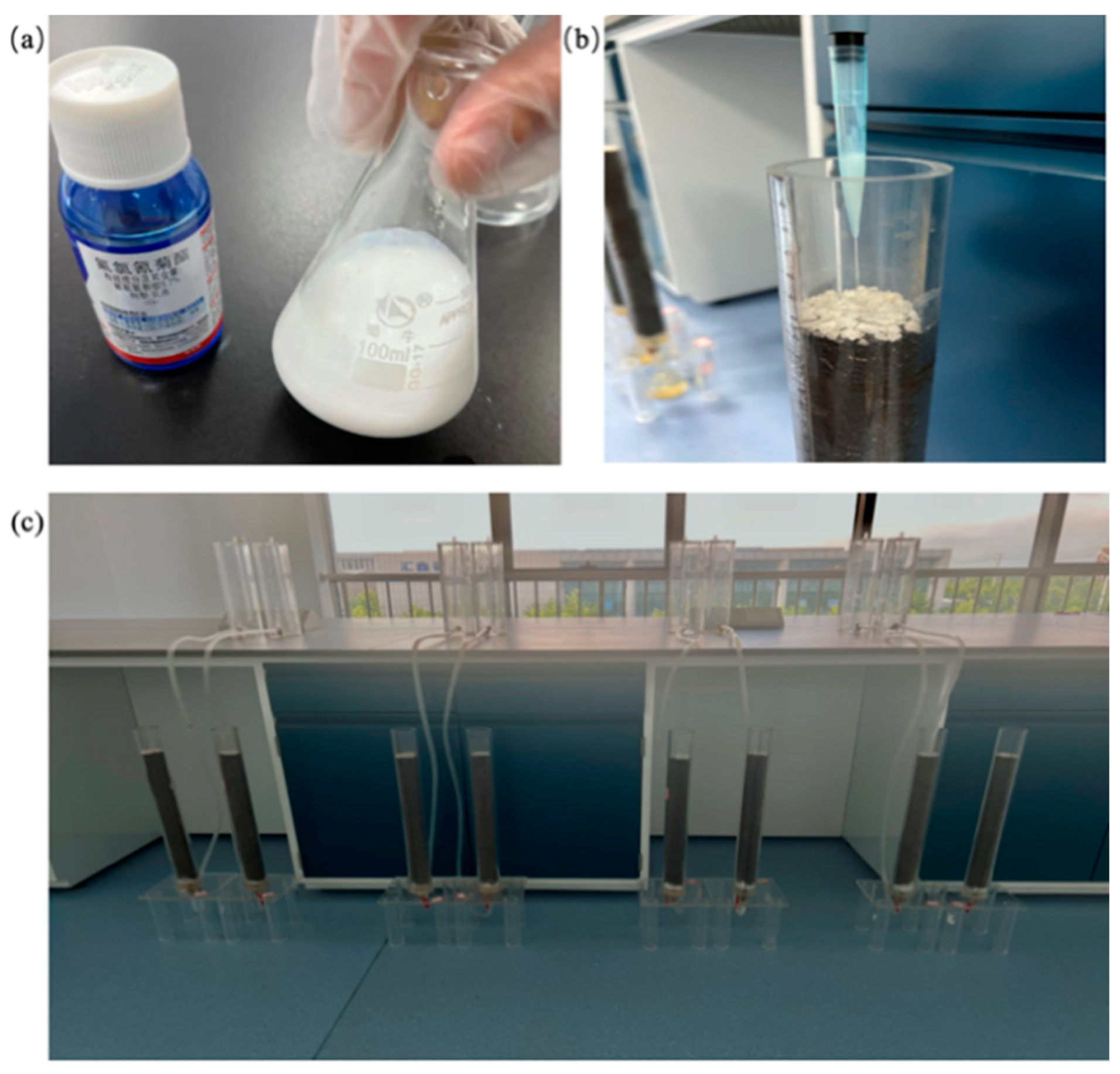
2.1. Sample Preparation
2.2. Gas Chromatography–Mass Spectrometry Detection
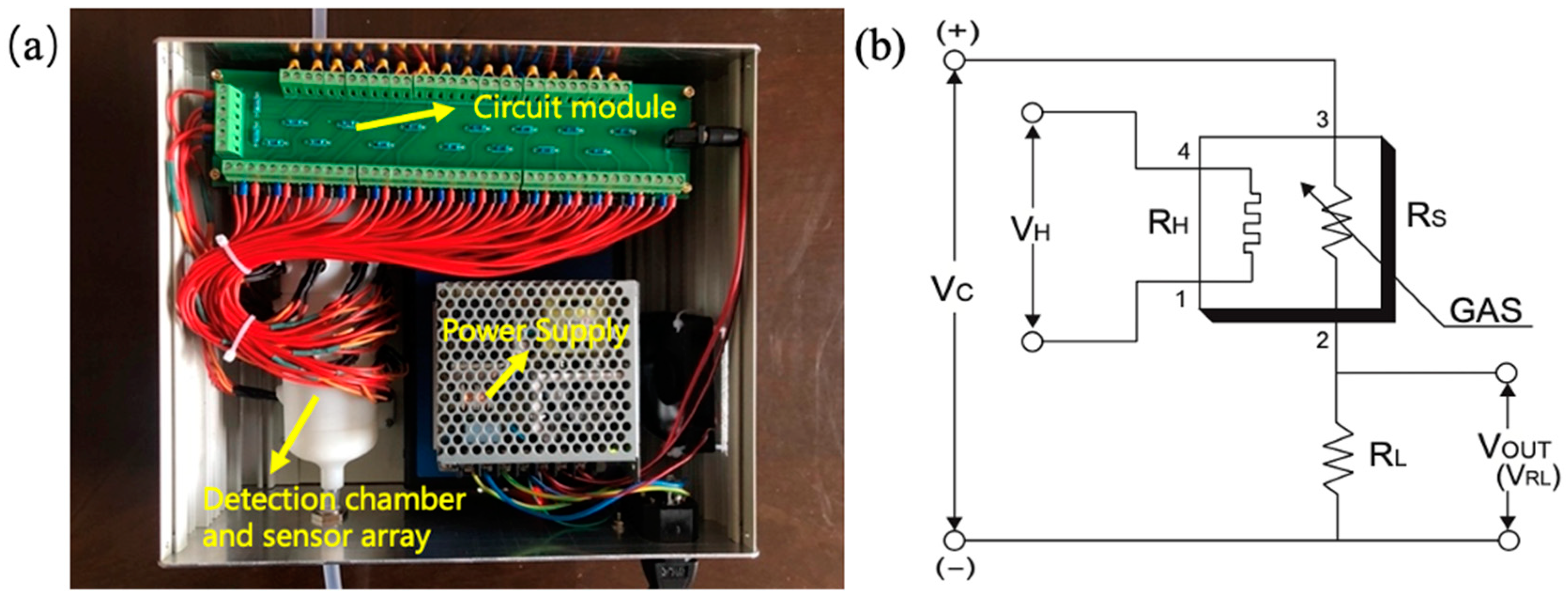
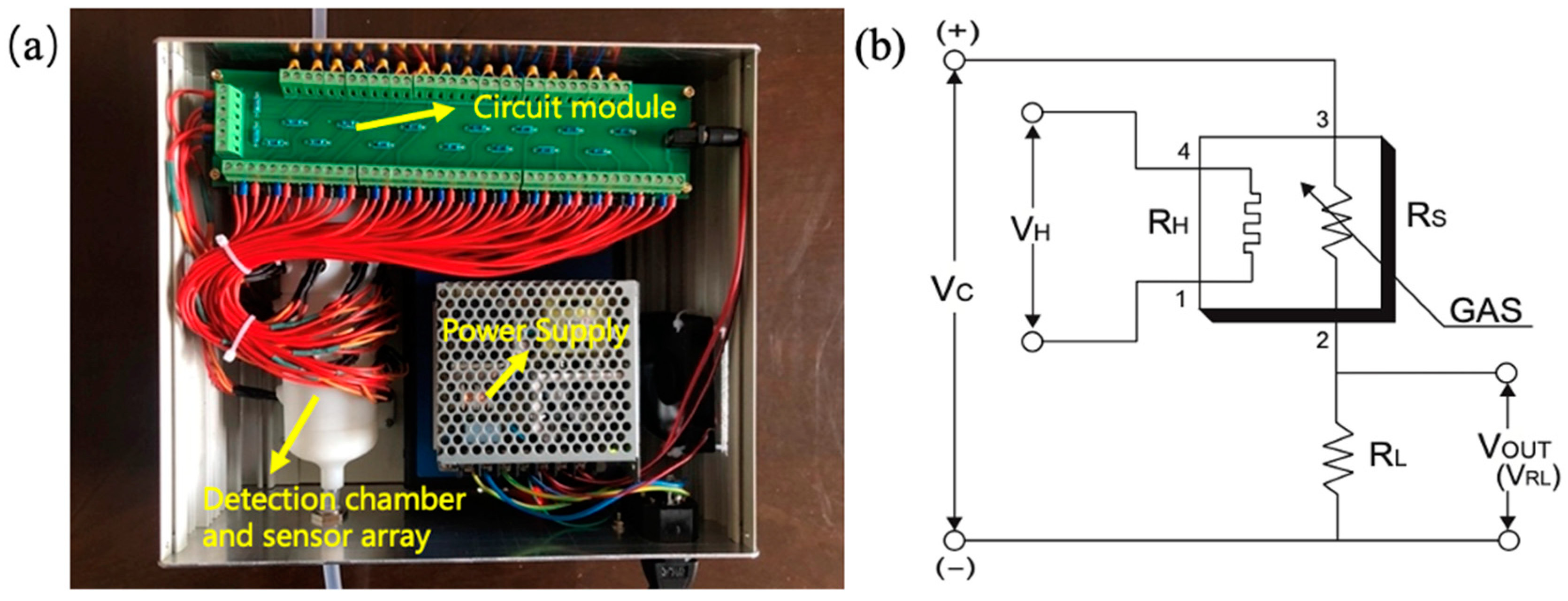
2.3. Soil Pesticide Odor Data Collection
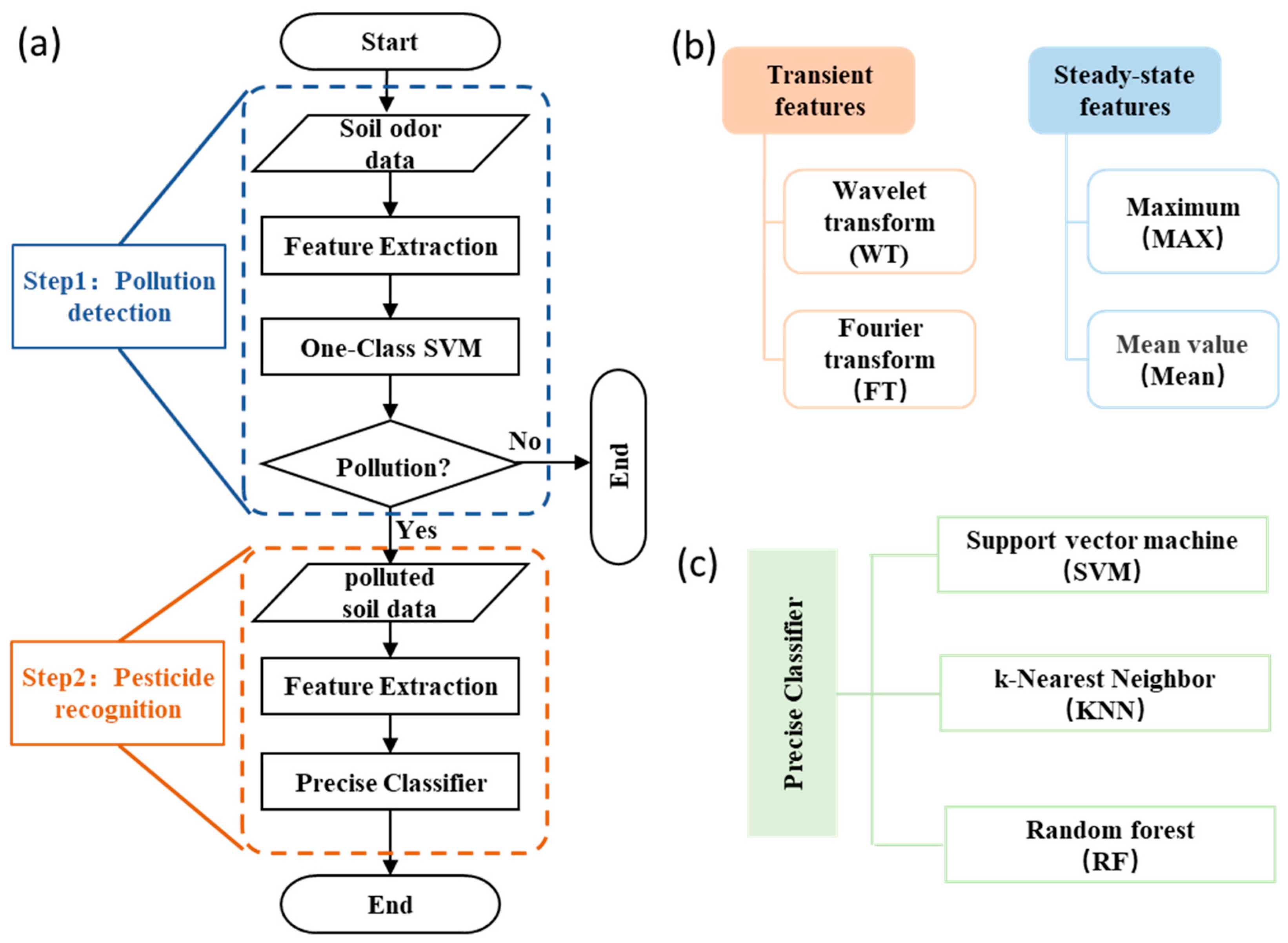
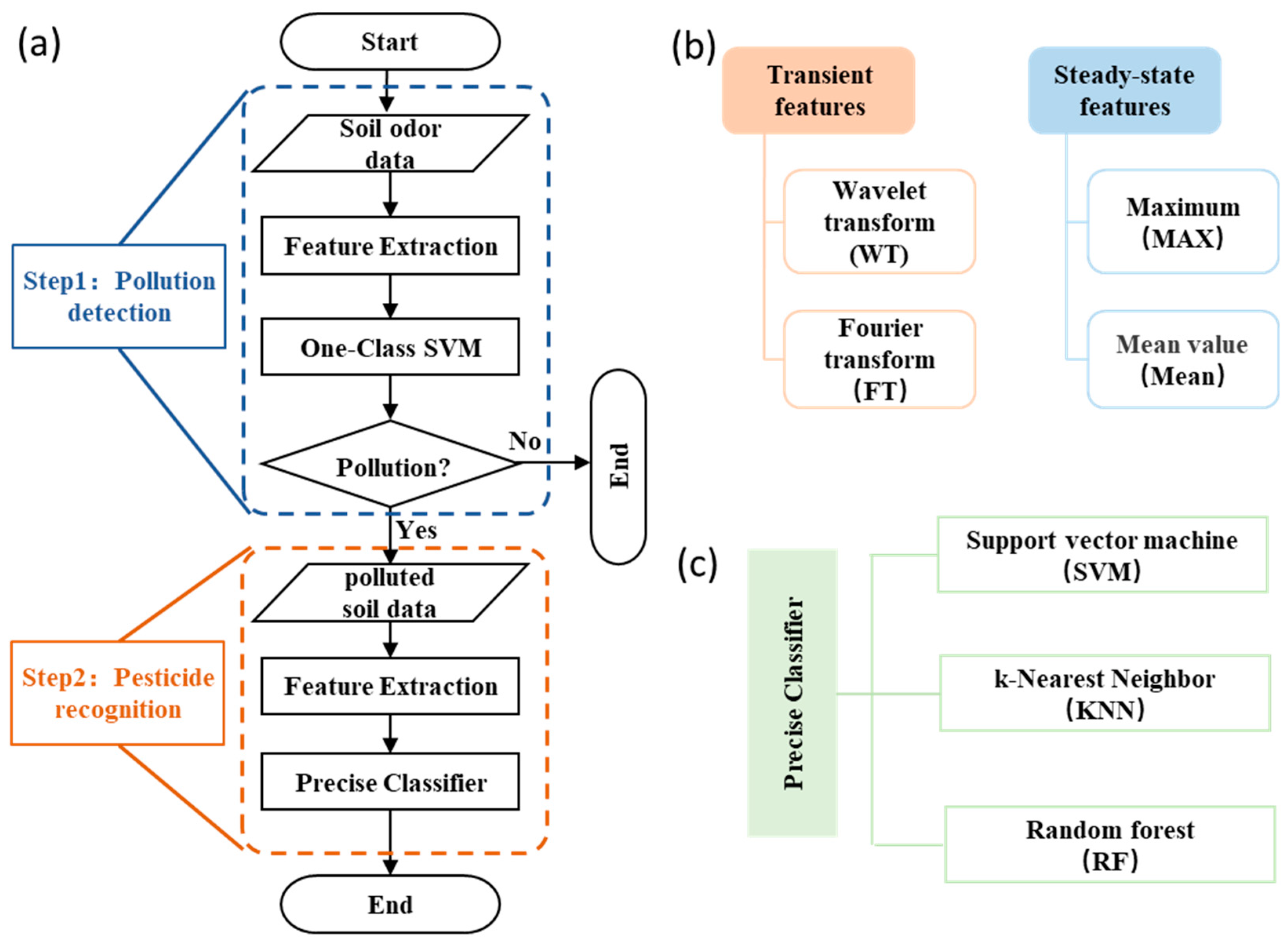
2.4. Experimental Data Analysis Methods
3. Results and Analysis
3.1. Main Volatiles in Pesticide Samples
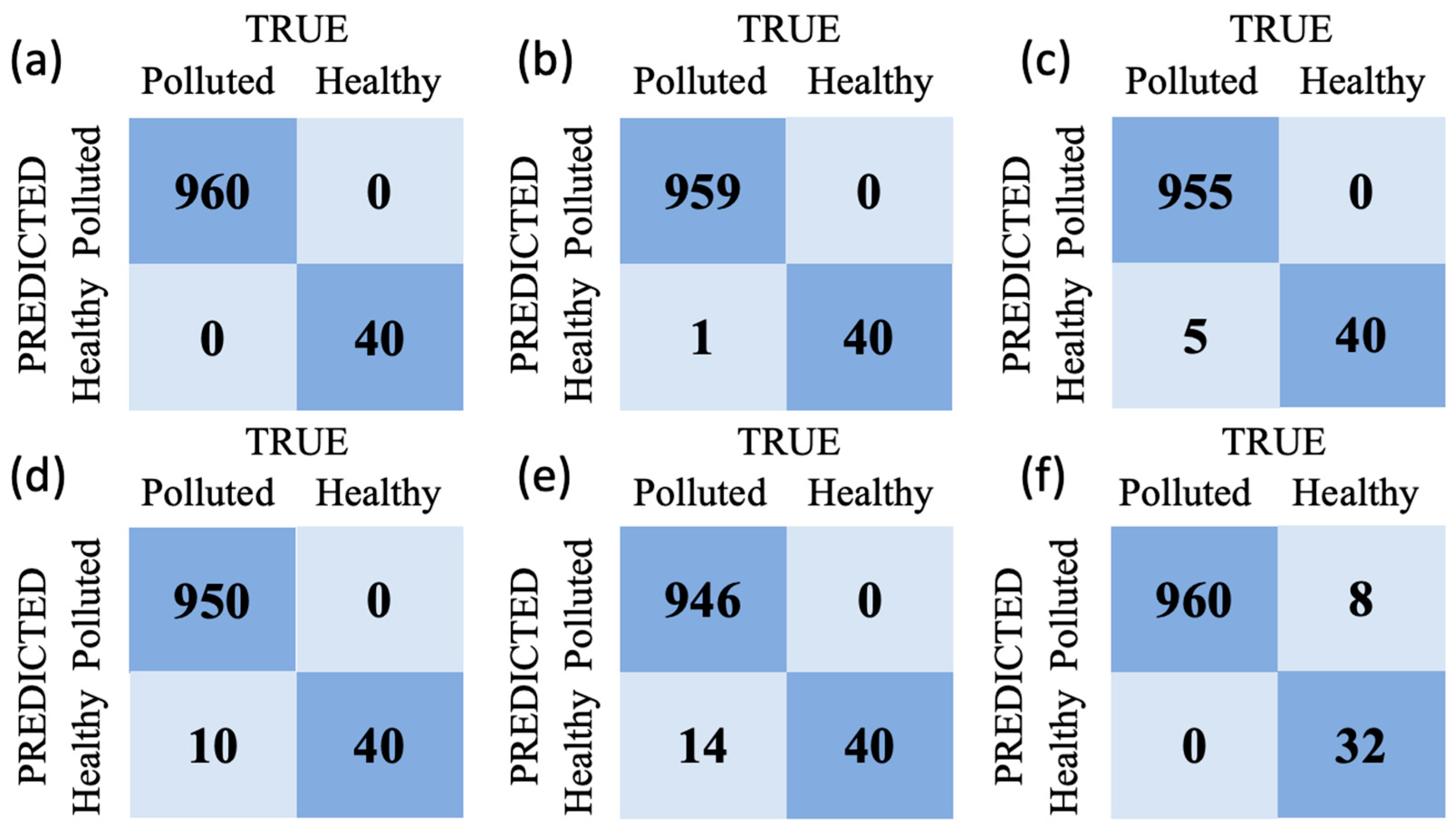
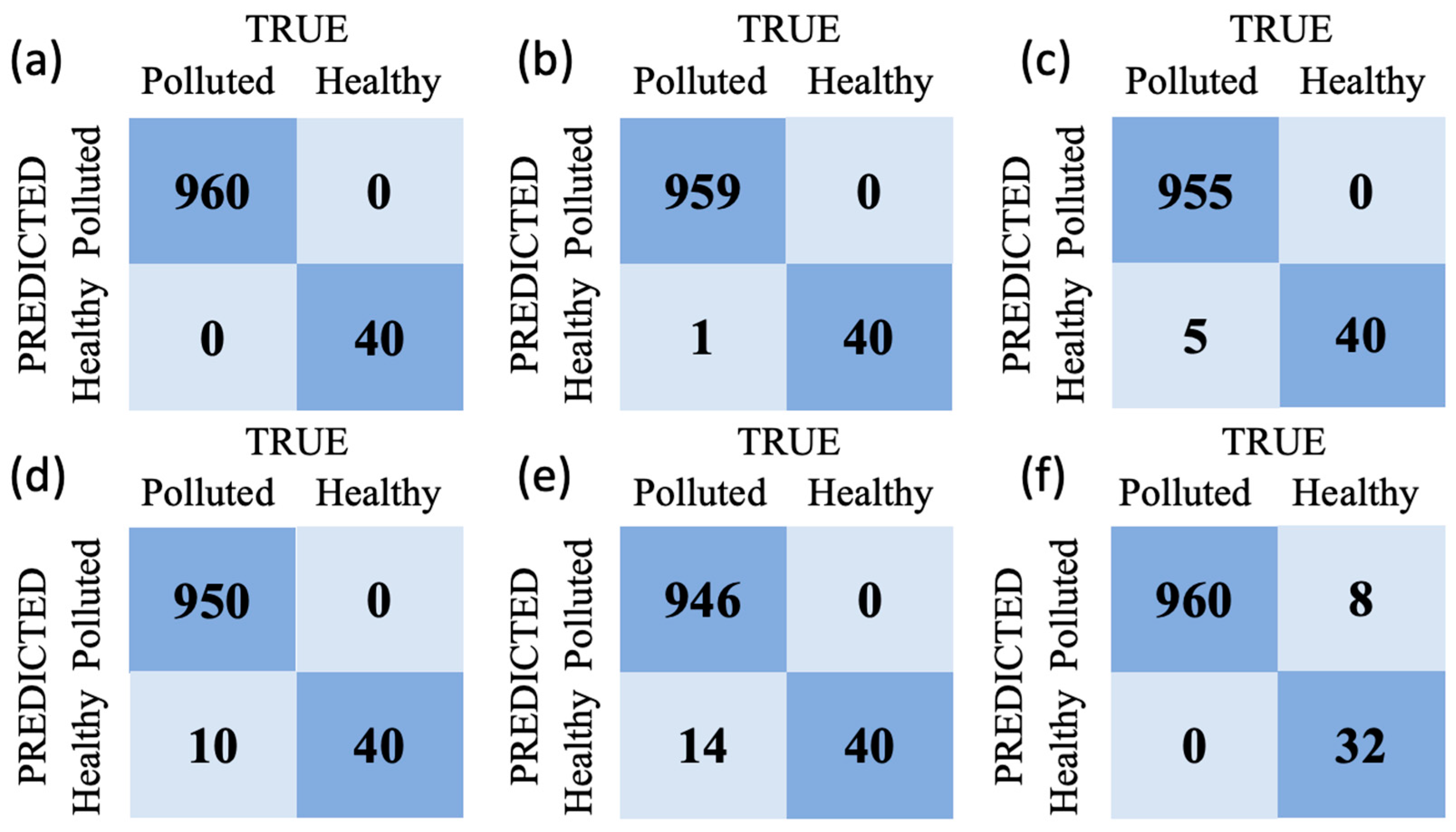
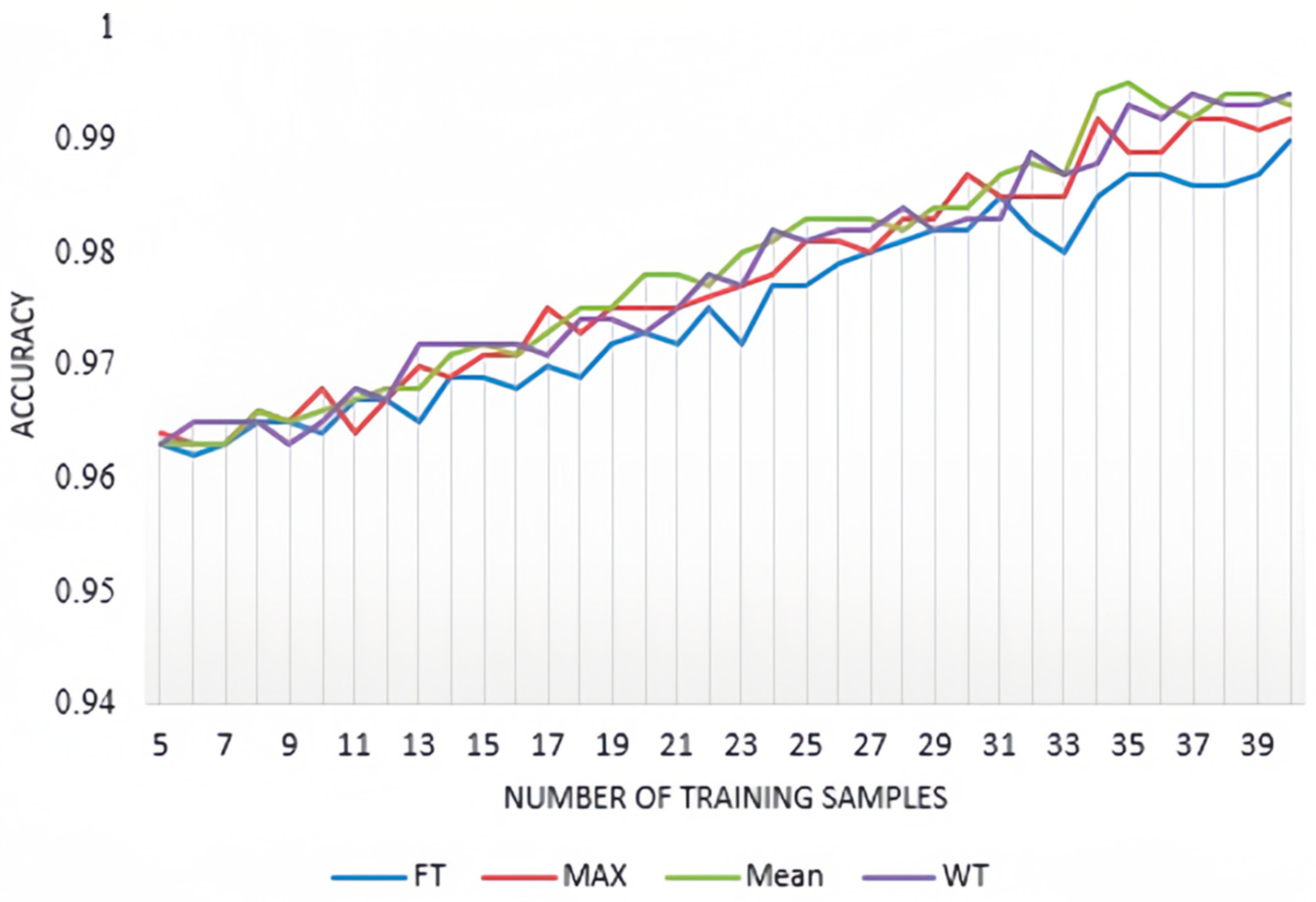
3.2. Unsupervised Soil Contamination Test Results
3.3. Results of the Supervised Identification of Pesticide Types
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations List
| Abbreviation: | Full name: |
| PCA | Principal component analysis |
| ANN | Artificial neural network |
| WT | Wavelet transform |
| FT | Fourier transform |
| MAX | Maximum |
| Mean | Mean value |
| One-Class SVM | One-class support vector machine |
| KNN | K-nearest neighbor |
| RF | Random forest |
| SVM | Support vector machine |
References
- Fu, H.Y.; Tan, P.; Wang, R.J.; Li, S.N.; Liu, H.Z.; Yang, Y.; Wu, Z.L. Advances in organophosphorus pesticides pollution: Current status and challenges in ecotoxicological, sustainable agriculture, and degradation strategies. J. Hazard. Mater. 2021, 424, 127494. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Long, L.; Ge, J.; Li, H.C.; Zhang, M.; Wan, Q.; Yu, X.Y. Effect of Imidacloprid Uptake from Contaminated Soils on Vegetable Growth. J. Agric. Food Chem. 2019, 67, 7232–7242. [Google Scholar] [CrossRef] [PubMed]
- Xiao, J.J.; Chen, L.; Pan, F.; Deng, Y.J.; Ding, C.C.; Liao, M.; Su, X.Y.; Cao, H.Q. Application method affects pesticide efficiency and effectiveness in wheat fields. Pest Manag. Sci. 2020, 76, 1256–1264. [Google Scholar] [CrossRef] [PubMed]
- Chang, J.N.; Fang, W.; Chen, L.; Zhang, P.Y.; Zhang, G.M.; Zhang, H.B.; Liang, J.S.; Wang, Q.Y.; Ma, W.F. Toxicological effects, environmental behaviors and remediation technologies of herbicide atrazine in soil and sediment: A comprehensive review. Chemosphere 2022, 307, 136006. [Google Scholar] [CrossRef] [PubMed]
- Singh, D.; Singh, S.K.; Modi, A.; Singh, P.K.; Zhimo, V.Y.; Kumar, A. Impacts of agrochemicals on soil microbiology and food quality. In Agrochemicals Detection, Treatment and Remediation; Butterworth-Heinemann: Oxford, UK, 2020; pp. 101–116. [Google Scholar]
- Sandanayake, S.; Hettithanthri, O.; Buddhinie, P.K.C.; Vithanage, M. Plant uptake of pesticide residues from agricultural soils. In Pesticides in Soils: Occurrence, Fate, Control and Remediation; Springer International Publishing: Cham, Switzerland, 2022; pp. 197–223. [Google Scholar]
- Kaur, R.; Singh, D.; Kumari, A.; Sharma, G.; Rajput, S.; Arora, S. Pesticide residues degradation strategies in soil and water: A review. Int. J. Environ. Sci. Technol. 2021, 20, 3537–3560. [Google Scholar] [CrossRef]
- Rodrigues, S.M.; Römkens, P.F. Human health risks and soil pollution. In Soil Pollution; Academic Press: Cambridge, MA, USA, 2018; pp. 217–250. [Google Scholar]
- Insam, H.; Seewald, M.S.A. Volatile organic compounds (VOCs) in soils. Biol. Fertil. Soils 2010, 46, 199–213. [Google Scholar] [CrossRef]
- Bokade, P.; Gaur, V.K.; Tripathi, V.; Bobate, S.; Manickam, N.; Bajaj, A. Bacterial remediation of pesticide polluted soils: Exploring the feasibility of site restoration. J. Hazard. Mater. 2023, 441, 129906. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, X.; Xiong, T.; Wang, H.; Jiang, L. Bioremediation of co-contaminated soil with heavy metals and pesticides: Influence factors, mechanisms and evaluation methods. Chem. Eng. J. 2020, 398, 125657. [Google Scholar] [CrossRef]
- Mali, H.; Shah, C.; Raghunandan, B.H.; Prajapati, A.S.; Patel, D.H.; Trivedi, U.; Subramanian, R.B. Organophosphate pesticides an emerging environmental contaminant: Pollution, toxicity, bioremediation progress, and remaining challenges. J. Environ. Sci. 2023, 127, 234–250. [Google Scholar] [CrossRef]
- Xu, L.; El-Aty, A.M.A.; Eun, J.B.; Shim, J.H.; Zhao, J.; Lei, X.; Gao, S.; She, Y.; Jin, F.; Wang, J. Recent Advances in Rapid Detection Techniques for Pesticide Residue: A Review. J. Agric. Food Chem. 2022, 70, 13093–13117. [Google Scholar] [CrossRef]
- Brack, W.; Hollender, J.; de Alda, M.L.; Müller, C.; Krauss, M. High-resolution mass spectrometry to complement monitoring and track emerging chemicals and pollution trends in European water resources. Environ. Sci. Eur. 2019, 31, 62. [Google Scholar] [CrossRef]
- Park, S.Y.; Kim, Y.; Kim, T.; Eom, T.H.; Kim, S.Y.; Jang, H.W. Chemoresistive materials for electronic nose: Progress, perspectives, and challenges. InfoMat 2019, 1, 289–316. [Google Scholar] [CrossRef]
- Ali, M.M.; Hashim, N.; Abd Aziz, S.; Lasekan, O. Principles and recent advances in electronic nose for quality inspection of agricultural and food products. Trends Food Sci. Technol. 2020, 99, 1–10. [Google Scholar]
- Nie, J.Y.; Li, R.; Jiang, Z.T.; Wang, Y.; Tan, J.; Tang, S.H.; Zhang, Y. Antioxidant activity screening and chemical constituents of the essential oil from rosemary by ultra-fast GC electronic nose coupled with chemical methodology. J. Sci. Food Agric. 2020, 100, 3481–3487. [Google Scholar] [CrossRef] [PubMed]
- Farraia, M.V.; Rufo, J.C.; Paciência, I.; Mendes, F.; Delgado, L.; Moreira, A. The electronic nose technology in clinical diagnosis: A systematic review. Porto Biomed. J. 2019, 4, e42. [Google Scholar] [CrossRef] [PubMed]
- Dorji, U. Electronic nose based wireless sensor network for soil monitoring in precision farming system. In Proceedings of the 2017 9th International Conference on Knowledge and Smart Technology (KST), Chonburi, Thailand, 1–4 February 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- De Cesare, F.; Di Mattia, E.; Pantalei, S.; Zampetti, E.; Vinciguerra, V.; Canganella, F.; Macagnano, A. Use of electronic nose technology to measure soil microbial activity through biogenic volatile organic compounds and gases release. Soil Biol. Biochem. 2011, 43, 2094–2107. [Google Scholar] [CrossRef]
- Bieganowski, A.; Jaromin-Glen, K.; Guz, Ł.; Łagód, G.; Jozefaciuk, G.; Franus, W.; Suchorab, Z.; Sobczuk, H. Evaluating Soil Moisture Status Using an e-Nose. Sensors 2016, 16, 886. [Google Scholar] [CrossRef] [PubMed]
- Bieganowski, A.; Józefaciuk, G.; Bandura, L.; Guz, Ł.; Łagód, G.; Franus, W. Evaluation of Hydrocarbon Soil Pollution Using E-Nose. Sensors 2018, 18, 2463. [Google Scholar] [CrossRef] [PubMed]
- Kong, C.; Ren, L.; Zhang, T.; Sun, Y.; Chang, Z. Rapid identification of pesticides in soil by bionic sniffing sensing system with unknown category detection function. Comput. Electron. Agric. 2024, 217, 108667. [Google Scholar] [CrossRef]
- Shi, X.-H.; Qiao, Y.-H.; Luan, X.-Y.; Yuan, Y.-P.; Xu, L.; Chang, Z.-Y. A two-stage framework for detection of pesticide residues in soil based on gas sensors. Chin. J. Anal. Chem. 2022, 50, 100124. [Google Scholar] [CrossRef]
- Sanaeifar, A.; Li, X.; He, Y.; Huang, Z.; Zhan, Z. A data fusion approach on confocal Raman microspectroscopy and electronic nose for quantitative evaluation of pesticide residue in tea. Biosyst. Eng. 2021, 210, 206–222. [Google Scholar] [CrossRef]
- Tang, Y.; Xu, K.; Zhao, B.; Zhang, M.; Gong, C.; Wan, H.; Wang, Y.; Yang, Z. A novel electronic nose for the detection and classification of pesticide residue on apples. RSC Adv. 2021, 11, 20874–20883. [Google Scholar] [CrossRef]
- Aghili, N. Detection of toxic and nontoxic sweet cherries at different degrees of maturity using an electronic nose. J. Food Meas. Charact. 2021, 9, 15. [Google Scholar]
- GB/T 41667-2022; Chemical Soil Column Leaching Test. The Standardization Administration of the People’s Republic of China: Beijing, China, 2022.
- Malhotra, E.S.; Rajdavinder, E. Review of Machine Learning and Data Mining Methods in Diabetes Research. 2018. Available online: https://www.researchgate.net/publication/339527204_Review_of_Machine_Learning_and_Data_Mining_Methods_in_Diabetes_Research (accessed on 10 March 2024).
- Wang, L.; Zhou, W.; Wang, H.; Parmar, M.; Han, X. A Novel Density Peaks Clustering Halo Node Assignment Method Based on K-Nearest Neighbor Theory. IEEE Access 2019, 7, 174380–174390. [Google Scholar] [CrossRef]
- Andrianomena, S. Probabilistic learning for pulsar classification. J. Cosmol. Astropart. Phys. 2022, 2022, 016. [Google Scholar] [CrossRef]
- Yan, J.; Guo, X.; Duan, S.; Jia, P.; Wang, L.; Peng, C.; Zhang, S. Electronic Nose Feature Extraction Methods: A Review. Sensors 2015, 15, 27804–27831. [Google Scholar] [CrossRef]
- Madson, N.; Gisele, R.; Jailson, D.A. Pesticides in the atmospheric environment: An overview on their determination methodologies. Anal. Methods 2018, 10, 4484–4504. [Google Scholar]
- Wang, P.; Fan, E.; Wang, P. Comparative Analysis of Image Classification Algorithms Based on Traditional Machine Learning and Deep Learning. Pattern Recognit. Lett. 2020, 11, 141. [Google Scholar] [CrossRef]
- Chen, K.; Liu, L.; Nie, B.; Lu, B.; Fu, L.; He, Z.; Li, W.; Pi, X.; Liu, H. Recognizing lung cancer and stages using a self-developed electronic nose system. Comput. Biol. Med. 2021, 131, 104294. [Google Scholar] [CrossRef]
- Bonah, E.; Huang, X.; Yi, R.; Aheto, J.H.; Osae, R.; Golly, M. Electronic nose classification and differentiation of bacterial foodborne pathogens based on support vector machine optimized with particle swarm optimization algorithm. J. Food Process. Eng. 2019, 42, e13236. [Google Scholar] [CrossRef]
- Tang, X.; Xiao, W.; Shang, T.; Zhang, S.; Han, X.; Wang, Y.; Sun, H. An Electronic Nose Technology to Quantify Pyrethroid Pesticide Contamination in Tea. Chemosensors 2020, 8, 30. [Google Scholar] [CrossRef]
- Tan, S.L.; Teo, H.S.; Garcia-Guzman, J.; Soc, I.C. E-nose Screening of Pesticide Residue on Chilli and Double-Checked Analysis through Different Data-Recognition Algorithms. In Proceedings of the 2010 IEEE Electronics, Robotics and Automotive Mechanics Conference, Cuernavaca, Mexico, 28 September–1 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 592–596. [Google Scholar]
- Amkor, A.; Maaider, K.; El Barbri, N. Mint treatment day prediction using a multi-sensors system and machine learning algorithms. Sens. Actuators A: Phys. 2021, 328, 112787. [Google Scholar] [CrossRef]
- Wang, B.; Chen, D.; Weng, X.; Chang, Z. Development an electronic nose to recognize pesticides in groundwater. Talanta 2024, 269, 125506. [Google Scholar] [CrossRef]
- Chen, D.; Wang, B.; Zhang, T.; Chang, Z. Towards accuracy recognition and content estimation of typical pesticides in groundwater via electronic nose. Sens. Actuators A Phys. 2023, 362, 114642. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NO. | Sensor | Target Gases | Marker |
|---|---|---|---|
| 1 | TGS2612 | Methane, LP, etc. | Figaro |
| 2 | TGS2611 | Methane, natural gas | Figaro |
| 3 | TGS2620 | Ethanol, organic solvents | Figaro |
| 4 | TGS2603 | Trimethylamine, methanethiol, etc. | Figaro |
| 5 | TGS2602 | Ammonia, hydrogen sulfide, etc. | Figaro |
| 6 | TGS2610 | LP, propane, butane | Figaro |
| 7 | TGS2600 | Hydrogen, alcohol, etc. | Figaro |
| 8 | GSBT11 | Volatile organic gases | Ogam |
| 9 | MS1100 | Toluene, formaldehyde, benzene, etc. | Ogam |
| 10 | MP135 | Hydrogen, alcohol, carbon monoxide, etc. | Winsen |
| 11 | MP901 | Alcohol, smoke, formaldehyde, toluene, benzene, acetone, paint, etc. | Winsen |
| 12 | MP-9 | Carbon monoxide, methane | Winsen |
| 13 | MP-3B | Alcohol | Winsen |
| 14 | MP-4 | Methane, natural gas, methane | Winsen |
| 15 | MP-5 | Propane | Winsen |
| 16 | MP-2 | Propane, smoke | Winsen |
| 17 | MP503 | Alcohol, smoke, isobutane, formaldehyde | Winsen |
| 18 | MP801 | Benzene, toluene, formaldehyde, alcohol, smoke | Winsen |
| 19 | MP905 | Benzene, toluene, formaldehyde, alcohol, smoke, lighter gas, paint | Winsen |
| 20 | MP402 | Methane, natural gas, methane | Winsen |
| 21 | WSP1110 | Nitrogen dioxide | Winsen |
| 22 | WSP2110 | Toluene, formaldehyde, benzene, alcohol, acetone, etc. | Winsen |
| 23 | WSP7110 | Hydrogen sulfide | Winsen |
| 24 | MP-7 | Carbon monoxide | Winsen |
| 25 | MP-702 | Ammonia | Winsen |
| 26 | TGS2618 | Butane, LP gas | Figaro |
| Type of Compound | Glyphosate | Chlorpyrifos | Cyfluthrin | Deltamethrin | Mancozeb | Dithane |
|---|---|---|---|---|---|---|
| Alcohol | 10 | 0 | 0 | 1 | 3 | 4 |
| Aromatic hydrocarbon | 2 | 23 | 35 | 18 | 3 | 8 |
| Phenol | 0 | 0 | 0 | 1 | 0 | 0 |
| Halogenated hydrocarbon | 0 | 1 | 1 | 0 | 0 | 0 |
| Nitrile | 0 | 0 | 0 | 0 | 0 | 1 |
| Ether | 2 | 0 | 0 | 0 | 0 | 2 |
| Aldehyde | 1 | 0 | 0 | 0 | 3 | 1 |
| Ketone | 0 | 0 | 0 | 0 | 1 | 2 |
| Alkane | 8 | 0 | 0 | 0 | 11 | 10 |
| Olefin | 0 | 0 | 0 | 0 | 0 | 3 |
| Amide | 0 | 0 | 1 | 0 | 0 | 0 |
| Ester | 2 | 0 | 0 | 0 | 0 | 6 |
| Other | 3 | 1 | 0 | 1 | 3 | 3 |
| Training Samples | Healthy Sample | Polluted Sample | Healthy Sample | Polluted Sample | Healthy Sample | Polluted Sample | |
|---|---|---|---|---|---|---|---|
| Detection Model | 20 | 20 | 30 | 10 | 40 | 0 | |
| KNN-FT | 100.0 | 100.0 | - | ||||
| RF-FT | 99.9 | 97.6 | - | ||||
| SVM-FT | 99.9 | 98.7 | - | ||||
| One-class SVM-FT | - | - | 99.0 | ||||
| KNN-MAX | 100.0 | 100.0 | - | ||||
| RF-MAX | 99.9 | 99.5 | - | ||||
| SVM-MAX | 99.0 | 98.6 | - | ||||
| One-class SVM-MAX | - | - | 99.2 | ||||
| KNN-Mean | 100.0 | 100.0 | - | ||||
| RF-Mean | 99.9 | 99.6 | - | ||||
| SVM-Mean | 98.7 | 100.0 | - | ||||
| One-class SVM-Mean | - | - | 99.3 | ||||
| KNN-WT | 100.0 | 100.0 | - | ||||
| RF-WT | 100.0 | 99.2 | - | ||||
| SVM-WT | 97.6 | 100.0 | - | ||||
| One-class SVM-WT | - | - | 99.4 | ||||
| Feature Extraction Methods | FT | MAX | Mean | WT |
|---|---|---|---|---|
| Classifier | KNN | |||
| Recognition rate(%) | 98.98 | 96.98 | 97.92 | 98.23 |
| Classifier | RF | |||
| Recognition rate(%) | 95.63 | 98.13 | 97.92 | 98.23 |
| Classifier | SVM | |||
| Recognition rate(%) | 95.42 | 99.27 | 99.27 | 99.17 |
| Application Scenario | Pesticide Brands | Recognition Rates | References |
|---|---|---|---|
| Tea | Cyhalothrin; bifenthrin; fenpropathrin | >88% | [37] |
| Cherries | Diazinon | >100% | [27] |
| Apples | Cypermethrin; chlorpyrifos | >94.64% | [26] |
| Chili | Profenofos | / | [38] |
| Mint | Malathion | >97% | [39] |
| Soil | Glyphosate; chlorpyrifo; deltamethrin; cyfluthrin; mancozeb; dithane z-78 | >92.5% | [23] |
| Soil | Chlorpyrifos; cyfluthrin; dithane | >93.75% | [24] |
| Groundwater | Glyphosate; chlorpyrifos; deltamethrin; cyfluthrin; mancozeb; zineb | >98.08% | [40] |
| Groundwater | Chlorpyrifos; malathion; chlorothalonil; lindane | >99.29% | [41] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, J.; Lv, Y.; Feng, Y.; Liu, C.; Zhang, Y.; Li, J.; Liu, S.; Weng, X. Research on Soil Pesticide Residue Detection Using an Electronic Nose Based on Hybrid Models. Agronomy 2024, 14, 766. https://doi.org/10.3390/agronomy14040766
Qiao J, Lv Y, Feng Y, Liu C, Zhang Y, Li J, Liu S, Weng X. Research on Soil Pesticide Residue Detection Using an Electronic Nose Based on Hybrid Models. Agronomy. 2024; 14(4):766. https://doi.org/10.3390/agronomy14040766
Chicago/Turabian StyleQiao, Jianlei, Yonglu Lv, Yucai Feng, Chang Liu, Yi Zhang, Jinying Li, Shuang Liu, and Xiaohui Weng. 2024. "Research on Soil Pesticide Residue Detection Using an Electronic Nose Based on Hybrid Models" Agronomy 14, no. 4: 766. https://doi.org/10.3390/agronomy14040766
APA StyleQiao, J., Lv, Y., Feng, Y., Liu, C., Zhang, Y., Li, J., Liu, S., & Weng, X. (2024). Research on Soil Pesticide Residue Detection Using an Electronic Nose Based on Hybrid Models. Agronomy, 14(4), 766. https://doi.org/10.3390/agronomy14040766