1. Introduction
Rice is a vital food crop globally and serves as the primary staple for two-thirds of the world’s population [
1]. Obtaining the number and precise locations of rice plants is crucial in rice cultivation and breeding, constituting a fundamental requirement for implementing precision agriculture [
2,
3,
4]. Contrasting with small-scale cultivation, determining the location and number of rice plants in the field proves challenging. Traditional field sampling methods are labor-intensive and time-consuming and only provide approximate estimates of plant quantity without quantifying their distribution. Advancements in remote sensing technology have made it a vital tool for non-invasive monitoring and field crop management [
5]. Satellite remote sensing provides crucial information on crop growth, yield, and soil quality. However, it has limitations such as high cost, low resolution, and insufficient timeliness, which prevent it from fully meeting the demands of precision agriculture [
6]. Conversely, UAV low-altitude remote sensing (UAV-LARS) offers advantages such as lower cost, higher resolution, increased flexibility, and real-time performance and has seen extensive adoption in agricultural production in recent years [
7]. Specifically, Qin et al. [
8] employed UAVs to capture hyperspectral images of fields, enabling accurate estimation of nitrogen content in rice leaves. Similarly, Gallo et al. [
9] employed the Yolo v7 algorithm for effective weed detection in images captured by UAVs. Additionally, Bao et al. [
10] proposed the DDMA-YOLO model for the precise detection of tea leaf diseases in UAV images. These applications demonstrate the wide-ranging potential of UAV-LARS technology, enhancing field management efficiency, reducing labor intensity, and offering substantial technical backing for precision agriculture development.
Plant counting and localization have long been a focus of research, with numerous researchers making substantial advancements. The predominant methods include detection-based and regression-based methods. Detection-based methods for plant counting and localization primarily employ techniques from object detection. Madec et al. [
11] utilized Faster R-CNN for wheat head counting. Xu et al. [
12] initially employed Mask R-CNN to distinguish corn seedlings from the background, subsequently utilizing YOLOv5 to detect and count the segmented corn seedling leaves. Yu et al. [
13] employed multiple receptive fields to capture different feature representations, effectively detecting and counting corn tassels in high spatiotemporal image sequences. Ye et al. [
14] used bi-directional cascade and weight fusion decoding methods to optimize the extraction of high-level semantic and low-level spatial information. Ye et al. [
15] also proposed FGLNet, effectively integrating global and local information through a weighted mechanism to enhance performance. Additionally, Yu et al. [
16] introduced PodNet, implementing pod counting and localization through lightweight encoders and efficient decoders. While detection-based methods can provide additional information such as plant size, regression-based methods offer advantages in terms of convergence and inference speed [
17].
Regression-based methods can be divided into density map-based methods and point regression-based methods. Density map-based methods first generate a density map of the plant distribution and then sum the density map to obtain the number of plants. Lu et al. [
18] achieved corn tassel counting by modeling the local visual features of field images. Xiong et al. [
19] reduced redundant calculations based on TasselNet, introducing TasselNetv2 for counting wheat spikes. Additionally, Lu et al. [
20] proposed a lighter and faster version, TasselNetV2+, for plant counting based on TasselNetv2. Lu et al. [
21] extended TasselNetv2 by introducing TasselNetV3, which used guided upsampling and background suppression for corn tassel counting and interpretable visualization. Peng et al. [
22] proposed DeNet for density estimation after wheat tillering. Zheng et al. [
23] proposed MLAENet for corn tassel counting, enhancing feature fusion through cascade dilated convolutions and a normalized attention mechanism. Bai et al. [
24] improved rice counting accuracy by designing a plant attention mechanism and implementing positive and negative losses for generating high-quality density maps. Similarly, Huang et al. [
25] introduced the optimal transport theory to count and locate cotton. Chen et al. [
26] extracted and fused finer features based on object size distribution for accurate rice ear counting. Additionally, Li et al. [
27] proposed RapeNet and RapeNet+, capable of detecting and counting rape flower clusters in the field. Although density map-based methods currently dominate the field of plant counting, some researchers have begun to explore point regression-based methods for determining plant locations. This approach directly generates predicted points, allowing not only the calculation of plant counts but also precise localization. Zhao et al. [
28] proposed P2PNet-Soy for soybean seed counting and localization, effectively distinguishing foreground and background through feature fusion and attention mechanisms.
Although the aforementioned methods have demonstrated competitive performance, detection-based methods rely primarily on box-level annotation, leading to increased data annotation workload in dense plant counting scenarios. On the other hand, regression-based methods primarily rely on density maps and struggle to accurately determine plant locations. Therefore, we select the point-based regression method P2PNet [
29] as the baseline to address the above limitations. However, when applied directly to rice counting, the performance of P2PNet is suboptimal. This is mainly due to its simpler backbone network’s inability to extract more effective features, and its simplistic feature fusion in the last two layers, which discards shallow texture and shape information in the rice image. Especially when rice enters the late tillering stage, overlapping leaves can easily cause visual errors, making plant counting and localization more difficult.
To address these problems, we proposed P2PNet-EFF based on P2PNet. Specifically, efficient multiscale attention (EMA) [
30] is integrated after the four body layers of the backbone, which suppresses the similar background interference while enhancing the feature extraction capability of the backbone. Additionally, for the original simple down-sampling feature fusion of P2PNet, we innovatively propose enhanced feature fusion (EFF). EFF effectively integrates deep semantic information while preserving the shallow spatial detail structure. At the same time, the transformer encoder layers [
31] in the EFF prompt the model to shift its focus from the center point of the plant to the morphology of the entire rice plant. It effectively mitigates misrecognition resulting from visual errors due to leaves overlap, further improving counting and localization accuracy. To validate the effectiveness of the proposed P2PNet-EFF, we conducted comprehensive experiments on the URCAL dataset and three widely used plant count datasets: MTC [
18], RFRB [
27], and DRPD [
32]. In summary, the innovations of this paper mainly include the following:
With the proposed EFF module, the model achieves a more efficient fusion of multi-scale features and pays more attention to the overall morphology of the rice plant, which also drastically reduces the misrecognition caused by leaf overlap. As a result, P2PNet-EFF shows better performance in counting tasks with rice and other plants.
EMA is a hybrid attention mechanism that integrates spatial attention and channel attention. Our integration of EMA into the backbone helps to reduce the effect of complex background noise and makes the model more focused on the target region, resulting in an overall improvement in accuracy.
We introduce a novel dataset for rice plant counting and localization, consisting of 365 high-resolution images and 173,352 precise point annotations, covering two different growth stages of rice seedlings and tillers.
3. Experimental Results and Analyses
3.1. Experiment Setting and Evaluation Metrics
In this paper, we employed the P2PNet-EFF for plant counting and localization. Before experimentation, all images were uniformly scaled to ensure that the longest side did not exceed 2048 pixels. During training, each image was randomly scaled (ranging from 0.7 to 1.3) and horizontally flipped with a 50% probability. The learning rate was set to 0.0001, and the Adam optimizer [
39] was used. In the transformer encoder layers, the number of multi-head attention mechanisms was fixed to four and employed a dropout ratio of 0.5. For the URCAL dataset, the number of encoders (N) was set to one, while for other datasets, N was set to six. The backbone was initialized with pre-trained weights provided by PyTorch. Since some datasets were originally used for object detection research, they were annotated with bounding boxes. We adopted the standard practice of using the center point of the bounding box as the training point annotation. The specific experimental runtime environment is detailed in
Table 1.
To evaluate the counting effectiveness of the model, we employ metrics such as the mean absolute error (MAE), the root mean square error (RMSE), and the coefficient of determination (
). These metrics can be formulated as follows:
Among them, and represent the predicted and ground-truth values of the i-th image, respectively, while N denotes the total number of images and is the mean of ground-truth count.
The evaluation indicators for plant localization include precision, recall, and F1-measure, which are defined as:
Here, TP, FP, and FN represent true positives, false positives, and false negatives, respectively.
3.2. Comparison with Other Models
3.2.1. Experiments on URCAL Dataset
In the URCAL dataset, we conducted experiments on plant counting and localization, respectively. For plant counting, we comprehensively compared P2PNet-EFF with current mainstream crowd counting methods (including MCNN [
40], CSRNet [
41], P2PNet, and FIDTM [
42]), along with the latest plant counting methods (Tasselnetv2+ and RPNet [
43]), as depicted in
Table 2. Our P2PNet-EFF showed significant advantages over P2PNet. It resulted in a 34.87% reduction in the MAE, a 28.19% reduction in the RMSE, and a 3.03% improvement in the
. Moreover, our approach demonstrates similar improvements to the latest rice plant counting method, RPNet. Specifically, P2PNet-EFF achieved a 3.88% decrease in MAE, a 3.57% decrease in RMSE, and a 1.07% increase in
. Meanwhile, we also compare P2PNet-EFF with other methods concerning the number of parameters and the time required to infer a single image. Although our method only increases the number of model parameters by 0.73M compared to P2PNet, the inference time increases by 0.06123 s. For plant localization, we compared our approach with FIDTM and P2PNet, and the results are presented in
Table 3. Compared to P2PNet, our method demonstrates an increase in precision by 1.6%, recall by 3.6%, and F1-measure by 2.6%.
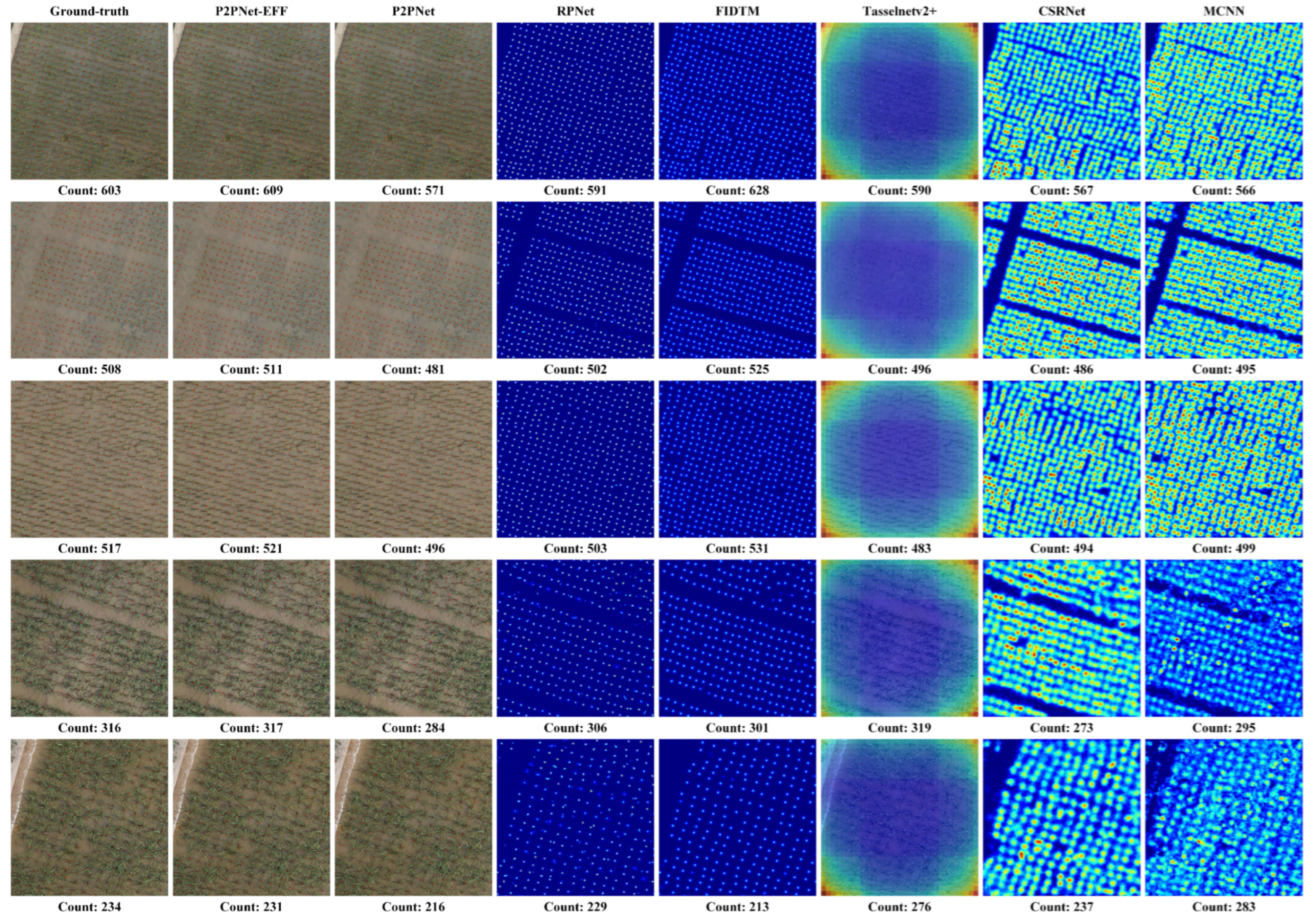
To further validate the effectiveness of our methods, we visualized all the above methods on the URCAL dataset, as depicted in
Figure 6. The figure illustrates the visualized results of the ground truth and each method from left to right. Specifically, the second and third columns provide a comparative analysis between P2PNet-EFF and P2PNet, respectively. It is evident from the visualization that our method significantly reduces the number of missed and false recognitions, particularly noticeable in images of rice plants entering the late tillering stage. This improvement can be attributed to the improved feature extractor and enhanced fusion module of P2PNet-EFF, effectively addressing overlapping problems among rice leaves.
Furthermore, the images of rice at the late tillering stage, depicted in rows 4 and 5 of
Figure 6, clearly show a significant decline in the quality of the density maps generated by the three density map-based methods, namely, RPNet, CSRNet, and MCNN, compared to the early stage of rice growth. This decline undoubtedly affects their counting accuracy. Meanwhile, despite the FIDTM method utilizing the Focal Inverse Distance Transform map to locate the plant position, its misrecognition rate remains relatively high compared to our method. This is further supported by the data in
Table 3, which clearly demonstrate the significant advantage of our method in plant localization accuracy. In summary, our method not only demonstrates excellent counting accuracy but also provides plant location information effortlessly, thereby better fulfilling the practical requirements of precision agriculture.
3.2.2. Experiments on MTC Dataset
The experimental results on the MTC dataset are shown in
Table 4. Our method achieves the lowest MAE and RMSE of
and
, respectively, outperforming other methods, while achieving the highest
value of
. Notably, compared to the P2PNet, our method shows a substantial reduction in MAE and RMSE of
and
, respectively, as well as a significant increase in
of
. This result demonstrates the superior performance of our method over the baseline in feature extraction and multi-scale feature fusion.
Moreover, we also compare the results of P2PNet and P2PNet-EFF on the MTC dataset using visualization methods, as shown in
Figure 7. The Grad-CAM [
44] heatmap clearly shows that compared to P2PNet, our method pays more attention to the entirety of corn tassels. This is due to our proposed EFF module, which can more finely fuse the multi-scale features. However, our method still faces challenges such as partially missed and false recognitions, primarily stemming from the diverse shapes of corn tassels and severe occlusion.
Table 4.
Results of different methods on the MTC dataset.
Table 4.
Results of different methods on the MTC dataset.
| Method | Venue | MAE | RMSE | R2 |
|---|
| Faster R–CNN [45] | TPAMI 2016 | 7.9 | 10.1 | 0.8988 |
| MCNN [40] | CVPR 2016 | 17.9 | 21.9 | 0.3288 |
| TasselNet [18] | PLME 2017 | 6.6 | 9.9 | 0.8659 |
| CSRNet [41] | CVPR 2018 | 6.9 | 11.5 | 0.8221 |
| BCNet [46] | TCSVT 2019 | 5.2 | 9.2 | 0.8803 |
| TasselNet V2 [19] | PLME 2019 | 5.4 | 9.2 | 0.8923 |
| CenterNet [47] | ICCV 2019 | 4.6 | 6.7 | 0.9381 |
| SFC2Net [48] | PLPH 2020 | 5.0 | 9.4 | 0.8866 |
| TasselNet V2+ [20] | Front Plant Sci 2020 | 5.1 | 9.0 | 0.8880 |
| RetinaNet [49] | TPAMI 2020 | 5.8 | 9.0 | 0.9079 |
| TasselNetV3-Seg† [21] | TGARS 2021 | 4.0 | 6.8 | 0.9396 |
| P2PNet [29] | ICCV 2021 | 8.2 | 13.2 | 0.7518 |
| Yolov8-N [50] | 2023 | 4.1 | 5.9 | 0.9547 |
| TasselLFANet [13] | Front Plant Sci 2023 | 5.8 | 12.8 | 0.7797 |
| Yolov8-UAV [51] | IEEE Access 2023 | 3.6 | 5.0 | - |
| RPNet [43] | Crop J 2023 | 3.1 | 5.0 | - |
| PlantBiCNet [14] | EAAI 2024 | 3.1 | 4.9 | 0.9681 |
| P2PNet-EFF | This paper | 3.1 | 4.3 | 0.9742 |
3.2.3. Experiments on RFRB Dataset
In the RFRB dataset, rape flowers grow densely and occlude with each other, which brings great challenges to many methods. The comparison results shown in
Table 5 demonstrate the differences between our method and the state-of-the-art (SOTA) method. Compared with the P2PNet, our method achieves a
and
reduction in MAE and RMSE, respectively, while the
increases by
. It can be observed from
Figure 8 that our method focuses more on dense areas of rape flowers and can better handle highly overlapping scenes, thus improving the counting accuracy.
3.2.4. Experiments on DRPD Dataset
The experimental results for the DRPD dataset are shown in
Table 6. Compared to P2PNet, our method achieves a reduction of 10.53% and 8.33% in the MAE and RMSE, respectively, while
improves by 0.94%. Although our method does not excel in all metrics, the disparity in
compared to PlantBiCNet is merely 0.0022.
Figure 9 illustrates the experimental results of P2PNet-EFF and P2PNet on the DRPD dataset. As depicted in the figure, the three rice panicle images exhibit overlapping panicles, and some are occluded by leaves, rendering the rice panicle counting task highly challenging. Despite not yet reaching the performance of the SOTA method, heatmap analysis indicates that our method, compared to P2PNet, is better able to focus on the target itself and effectively reduces interference from rice leaves on the results.
3.3. Ablation Experiment
To verify the effectiveness of P2PNet-EFF, extensive ablation experiments were conducted on the URCAL dataset, and the results are shown in
Table 7. First, we directly applied P2PNet as the baseline for rice counting and localization, whose MAE, RMSE, and
were 15.2, 18.8, and 0.9584, respectively. To explore the effect of the EMA module, we added the EMA module to the baseline and found that MAE and RMSE decreased by 1.5 and 0.7, respectively, while
increased by 0.003.
We then removed the EMA module and evaluated the impact of the EFF(x1) module in isolation. In comparison to the baseline, the MAE and RMSE decreased by 3.8 and 2.7, respectively, while improving in by 0.0111. Subsequently, we utilized the backbone with EMA and incorporated EFF(no). As a result of this enhanced feature fusion approach, there was a notable decrease in MAE and RMSE by 4.4 and 4.3, respectively, accompanied by an increase in by 0.0167, indicating performance optimization.
Finally, we replaced EFF(no) with EFF(x1). Compared to the experimental results obtained using only EFF(no), the inclusion of transformer encoder layers led to a reduction in MAE and RMSE by 0.9 and 1.0, respectively, accompanied by an increase in by 0.0123. Additionally, we investigated the impact of varying the number of encoders (N) on the experimental results. According to the experimental results, the addition of six layers resulted in an increase in MAE and RMSE by 1.4 and 2.0, respectively, while decreased by 0.0037 compared to EFF(x1).
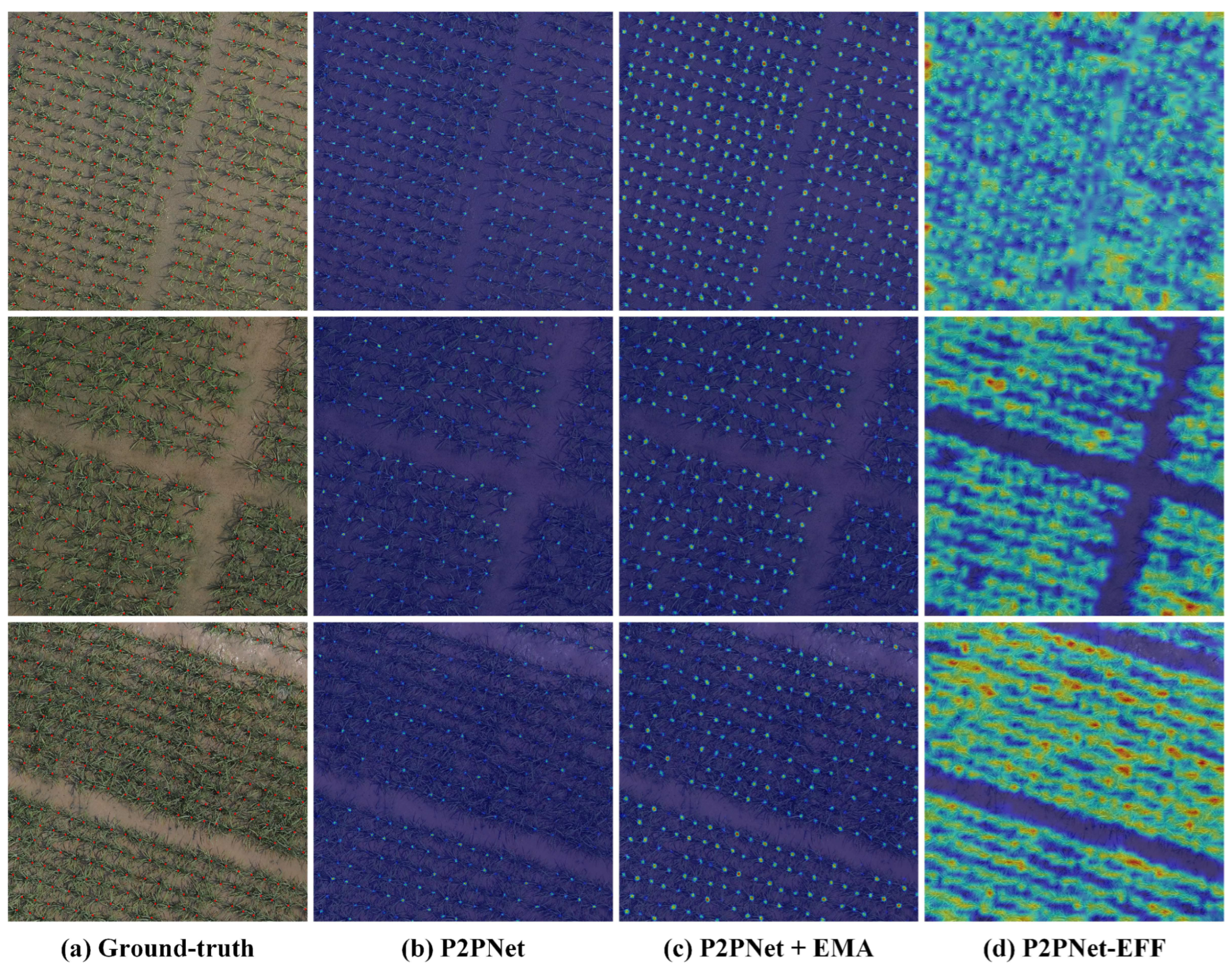
To provide further insight into the impact of different components on improving model performance, we combined the Grad-CAM heatmap for visualization and analysis, as shown in
Figure 10. Compared to the baseline, the backbone exhibits improved feature extraction capability after integrating the EMA module. Specifically,
Figure 10c illustrates that the model is more focused on the target, thereby alleviating the problem of missed recognition to some extent compared to the baseline. In contrast,
Figure 10d presents the visualization results of our complete method. By leveraging the self-attention mechanism in the transformer encoder layer, the model can accurately focus on the rice plant itself rather than being confined to a central location. This enhanced focus on the rice plant enables the model to better handle occurrences of crossing and shading between rice leaves, thus improving counting and localization accuracy.
4. Discussion
Plant counting has been researched extensively. Most existing research employs density map-based methods [
18,
19,
21,
43,
48] to predict the number of plants. These methods estimate the total count by summing the density maps predicted by the model. While density-based maps can approximate the number and distribution of plants, they lack the precision to pinpoint the coordinates of each plant. Accurate plant location information is essential and critical for precision agriculture. Therefore, we opted to utilize P2PNet, a point regression-based technique derived from crowd counting, for plant counting. P2PNet is advantageous as it can both count plants and accurately determine their locations. However, our application of P2PNet for plant counting exhibited suboptimal performance. This is primarily because the scenario of plant counting differs from the high-density, single-target morphology typical of crowd counting. Plant counting must address challenges such as mutual occlusion between plants and various morphologies (e.g., corn tassels, rice in the late tillering stage, etc.).
To tackle the aforementioned challenges, we propose the P2PNet-EFF model, an improvement of P2PNet, which aims to enhance the counting and localization accuracy of plants. On the URCAL dataset, P2PNet-EFF demonstrated significant improvements in counting accuracy over the original P2PNet model: it reduced the MAE by 34.87% and the MSE by 28.19% and improved the by 3.03%. For plant localization, the precision, recall, and F1-measure showed improvements of 1.6%, 3.6%, and 2.6%, respectively. Moreover, P2PNet-EFF also exhibited excellent performance on the MTC, RFRB, and DRPD datasets.
The performance improvements of P2PNet-EFF are mainly attributed to two key factors: firstly, the integration of the EMA attention mechanism into the P2PNet backbone, which significantly enhances the model’s focus on targets during feature extraction, thereby mitigating interference from similar background noise. Secondly, we introduced the EFF module, which better explores plant–plant relationships through a finer feature fusion strategy combined with a self-attention mechanism. This enables the model to concentrate more on the features of the plant itself rather than just the center of the overlapping region of the leaves, leading to more accurate performance in plant counting and localization.
Despite the success of our approach, several limitations necessitate further exploration and improvement. Firstly, the deep network structure and the finer feature fusion process of P2PNet-EFF result in a relatively high computational cost, leading to extended inference times. This could impact production efficiency, especially in scenarios requiring the efficient processing of a large number of images. Secondly, our current research primarily focuses on acquiring plant numbers and location information during the early stages of rice growth. However, other important aspects of the rice growth cycle, such as changes in plant size and the number of rice spikes at maturity, have not been studied in depth. This information is equally vital for a comprehensive understanding of crop growth and for optimizing agricultural management strategies.
In future research, we aim to address the aforementioned limitations and plan to make improvements in two main directions. Firstly, we will explore model lightweight techniques, such as channel pruning [
52,
53] and parameter quantization [
54], to reduce computational costs and model size while maintaining accuracy. Secondly, we will broaden the scope of research to encompass rice plant segmentation and spike counting. Accurate plant segmentation facilitates the calculation of the tillering angle, providing a more effective method for monitoring rice growth conditions [
55]. Additionally, by employing the P2PNet-EFF model to count rice spikes at maturity and integrating spike counts with thousand-grain weight (TGW), we anticipate more precise yield predictions. These initiatives will enable comprehensive monitoring of the entire rice growth cycle and promote the advancement of rice cultivation and breeding toward intelligence and precision.
5. Conclusions
This paper proposes the P2PNet-EFF based on P2PNet. By introducing the EFF module, this module effectively replaces the simple two-layer downsampling feature fusion method in P2PNet, thus achieving finer fusion. This improvement enables the model to pay more comprehensive attention to the overall morphology of the plants, significantly reducing counting and localization errors caused by leaf overlap. Additionally, by embedding EMA modules behind the four body layers of the backbone, the P2PNet-EFF not only effectively suppresses the interference caused by similar backgrounds but also significantly enhances the feature extraction capability.
To evaluate the effectiveness of P2PNet-EFF, we constructed a UAV-based rice plant counting and localization dataset, URCAL, and conducted extensive experiments. Specifically, the experimental results show that compared to the original P2PNet, P2PNet-EFF reduces the MAE and RMSE by 34.87% and 28.19%, respectively, and increases the by 3.03%. Furthermore, we also conducted experiments on three commonly used plant counting datasets, MTC, RFRB, and DRPD. The results demonstrate that P2PNet-EFF achieves significant performance improvements over P2PNet and also provides competitive results compared to recent SOTA methods. Meanwhile, we also performed ablation experiments in conjunction with Grad-CAM heatmaps. The experimental results clearly demonstrate the effectiveness of each proposed component.
Finally, we discussed the limitations of the P2PNet-EFF and proposed possible future research directions to further refine and optimize our method.


 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









