Online Detection of Loading Capacity in Mechanized Pepper Harvesting Using Ultrasonic Sensors

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
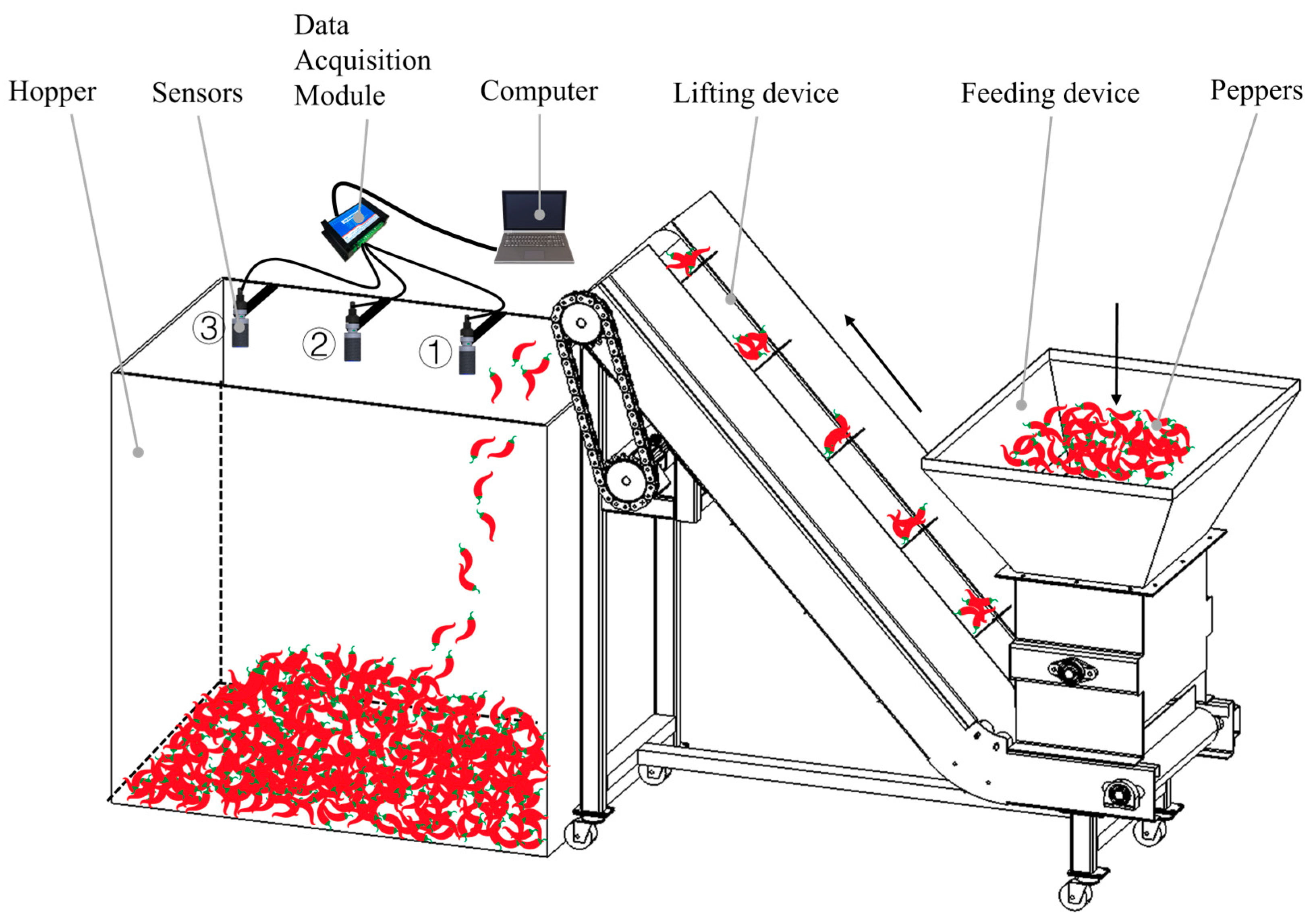
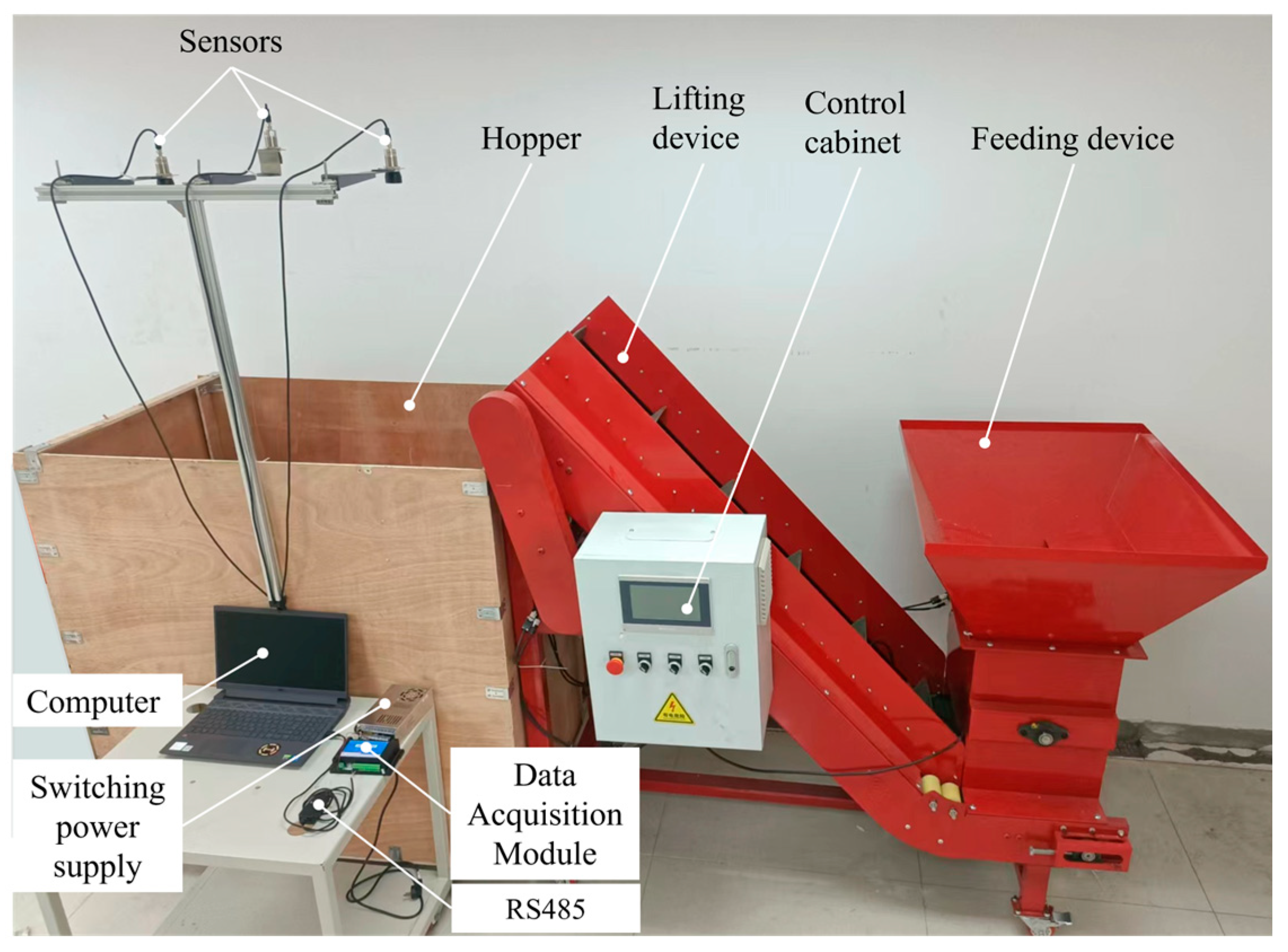
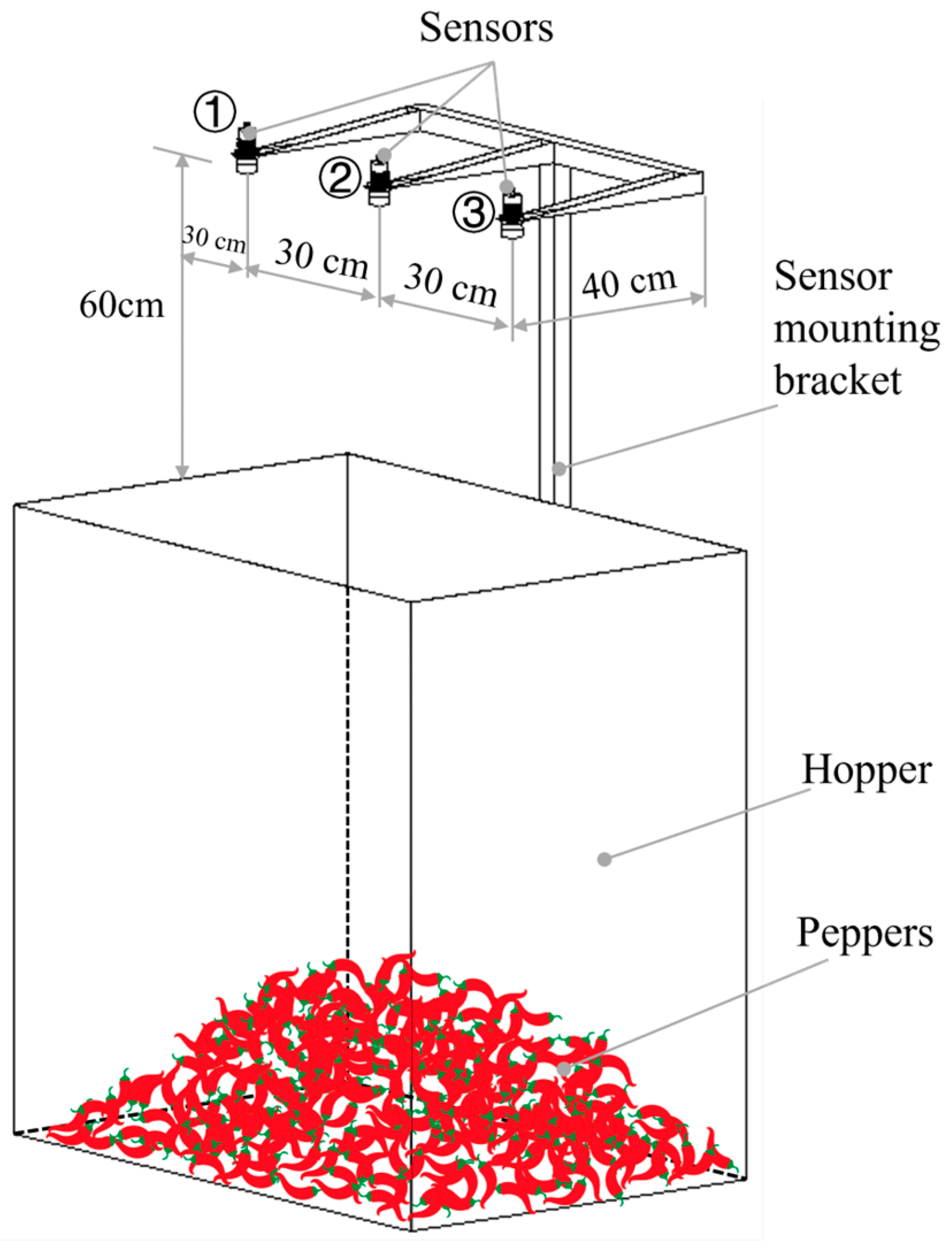
2.1. Construction of a Bench Test for the Detection of Pepper Loading Capacity
2.2. Pepper Loading Capacity Detection Software Design
2.3. Sensor Calibration and Accuracy Tests
2.3.1. Sensor Calibration
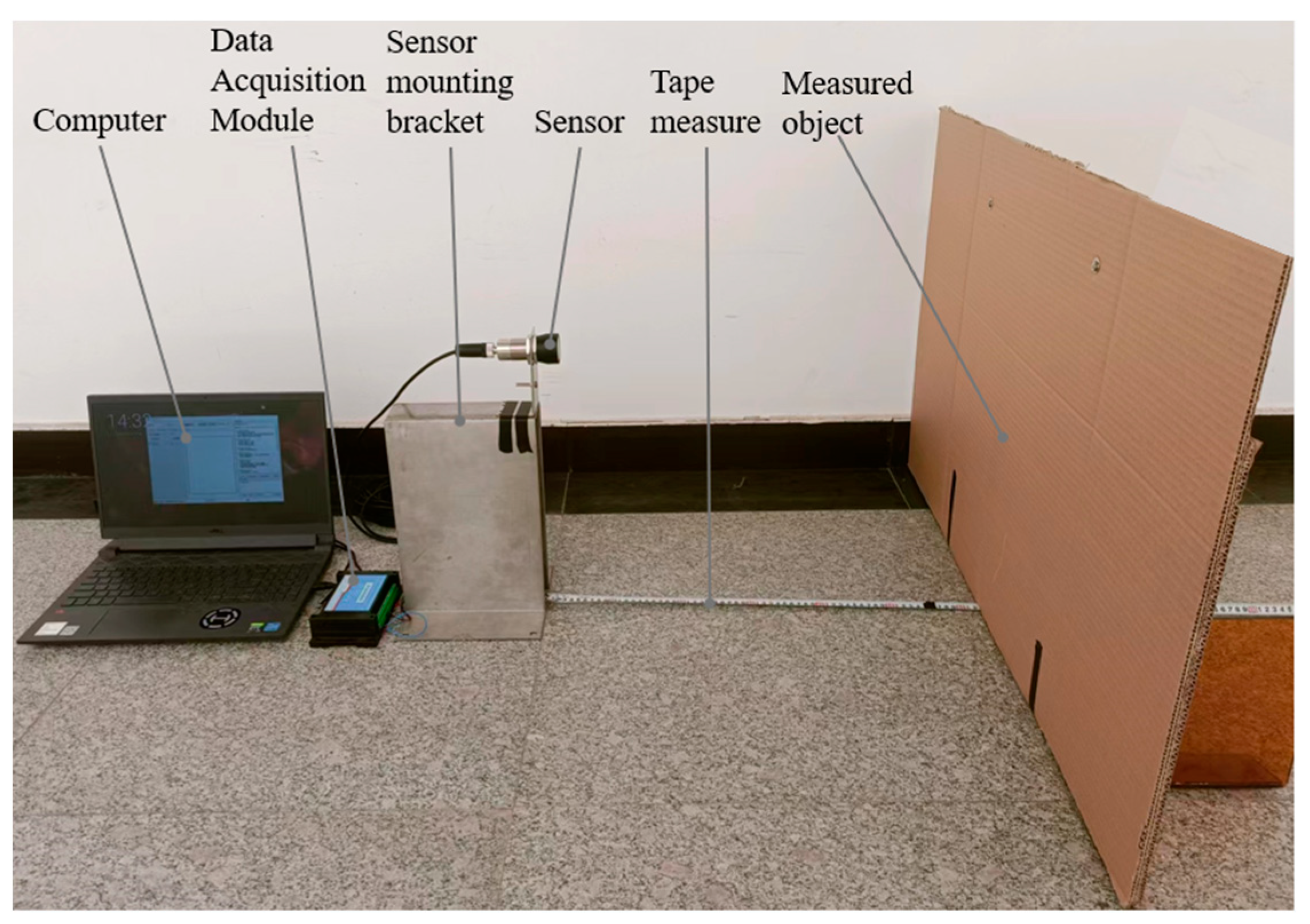
2.3.2. Accuracy Tests for the Detection of Pepper Stacking Height
2.4. Detection Tests of Pepper Stacking Height in the Hopper
2.5. Construction Method of the Pepper Loading Capacity Detection Model
3. Results and Discussion
3.1. Adaptability Test Results for Pepper Loading Capacity Detection Sensors
3.1.1. Sensor Calibration Test Results
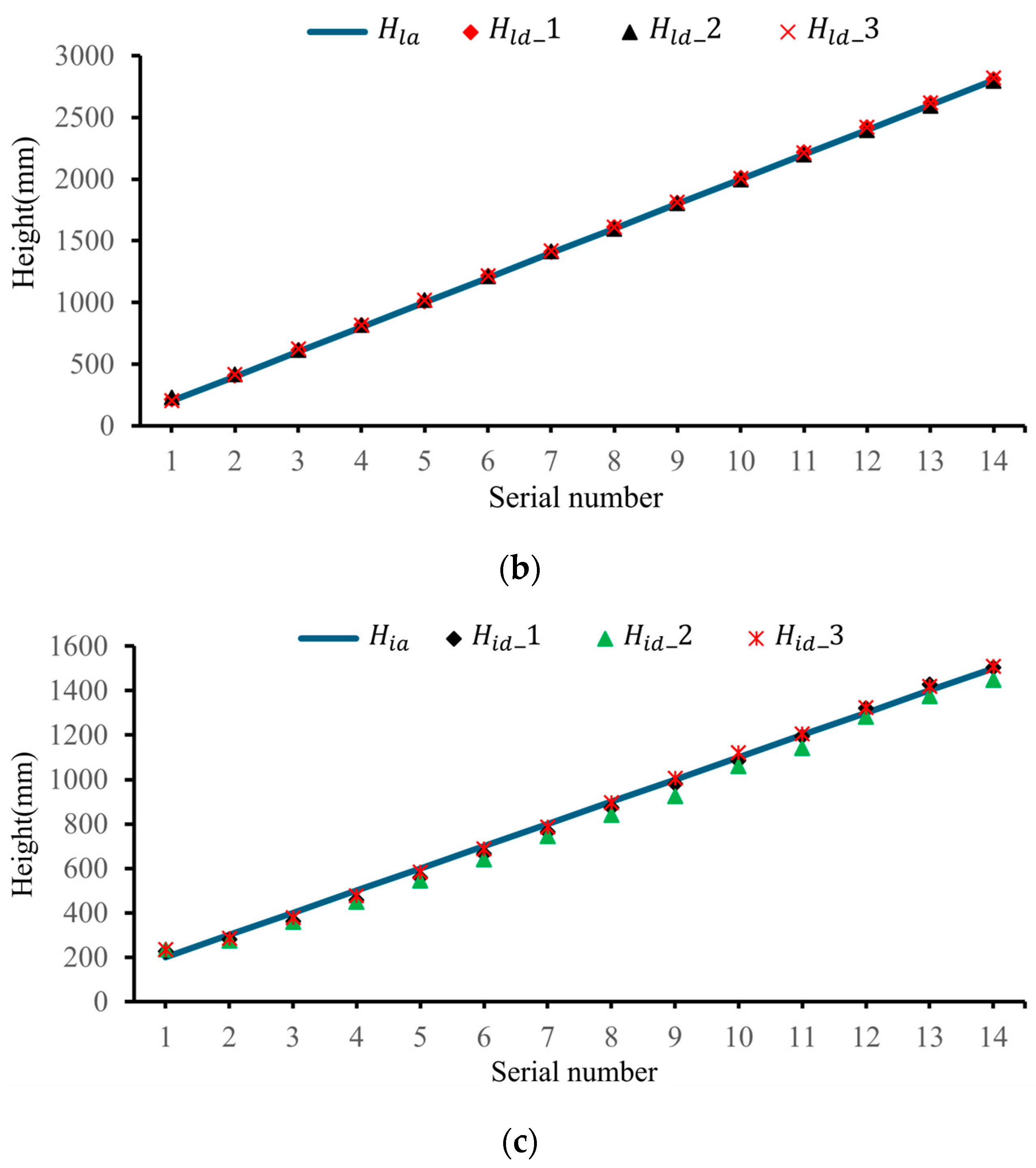
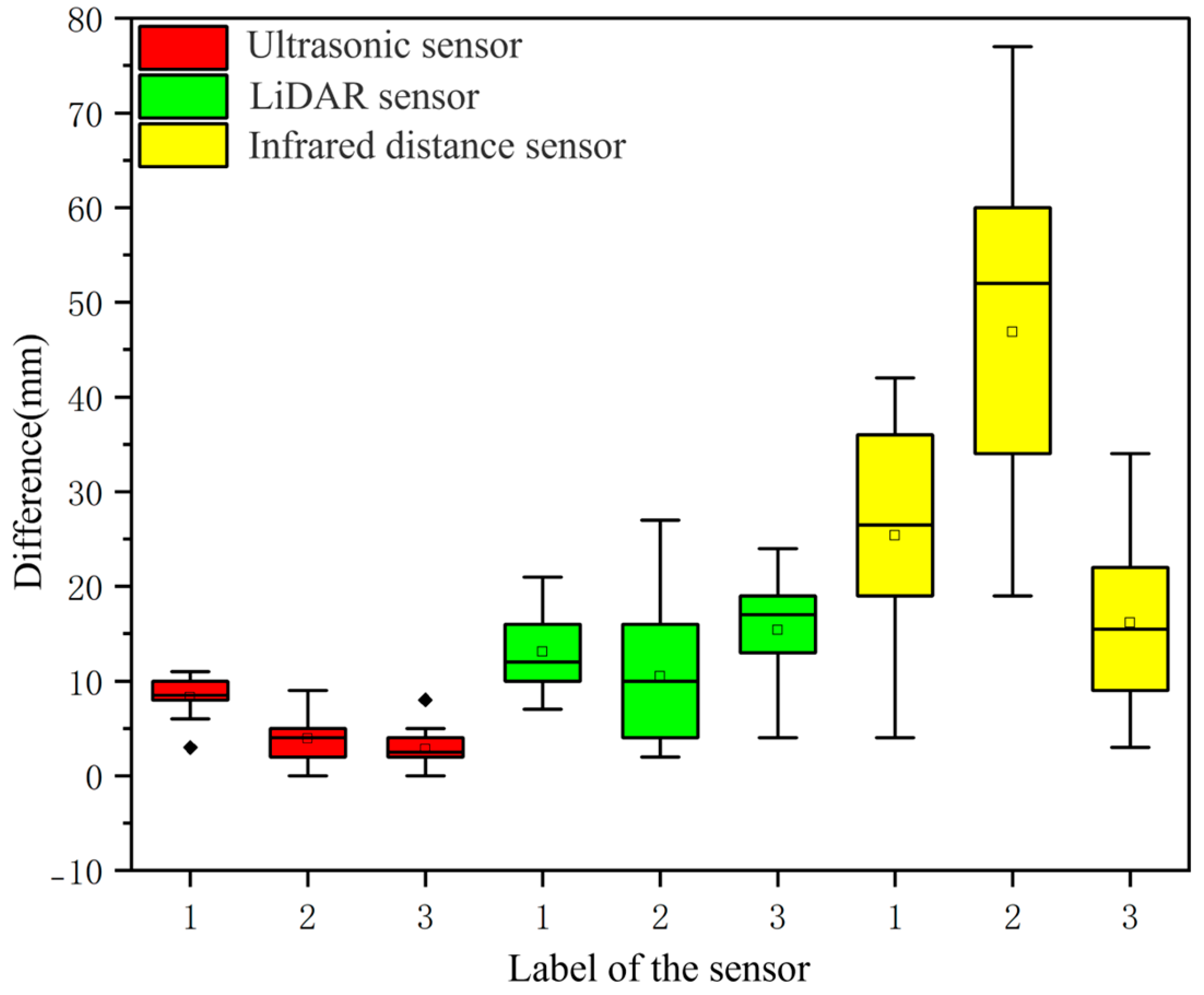
3.1.2. Comparison Results of the Detection Accuracy of Pepper Stacking Height
3.2. Construction and Validation of the Detection Model for Pepper Loading Capacity
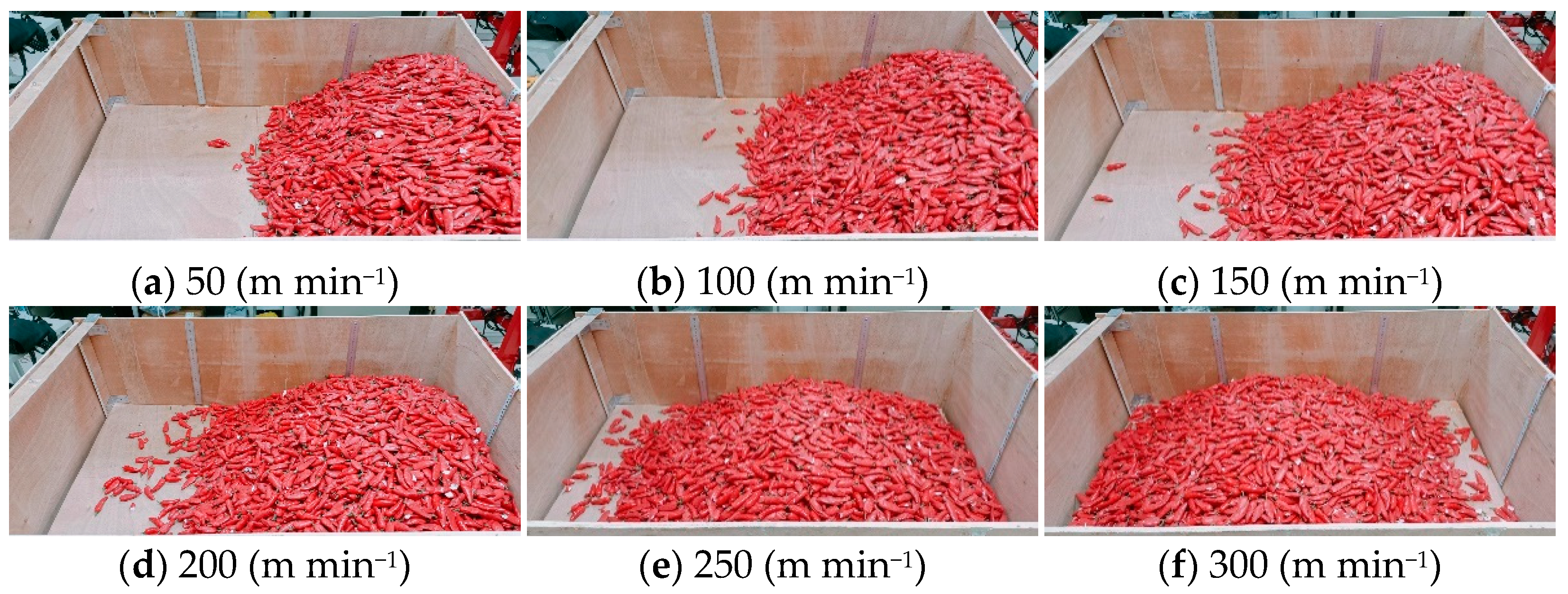
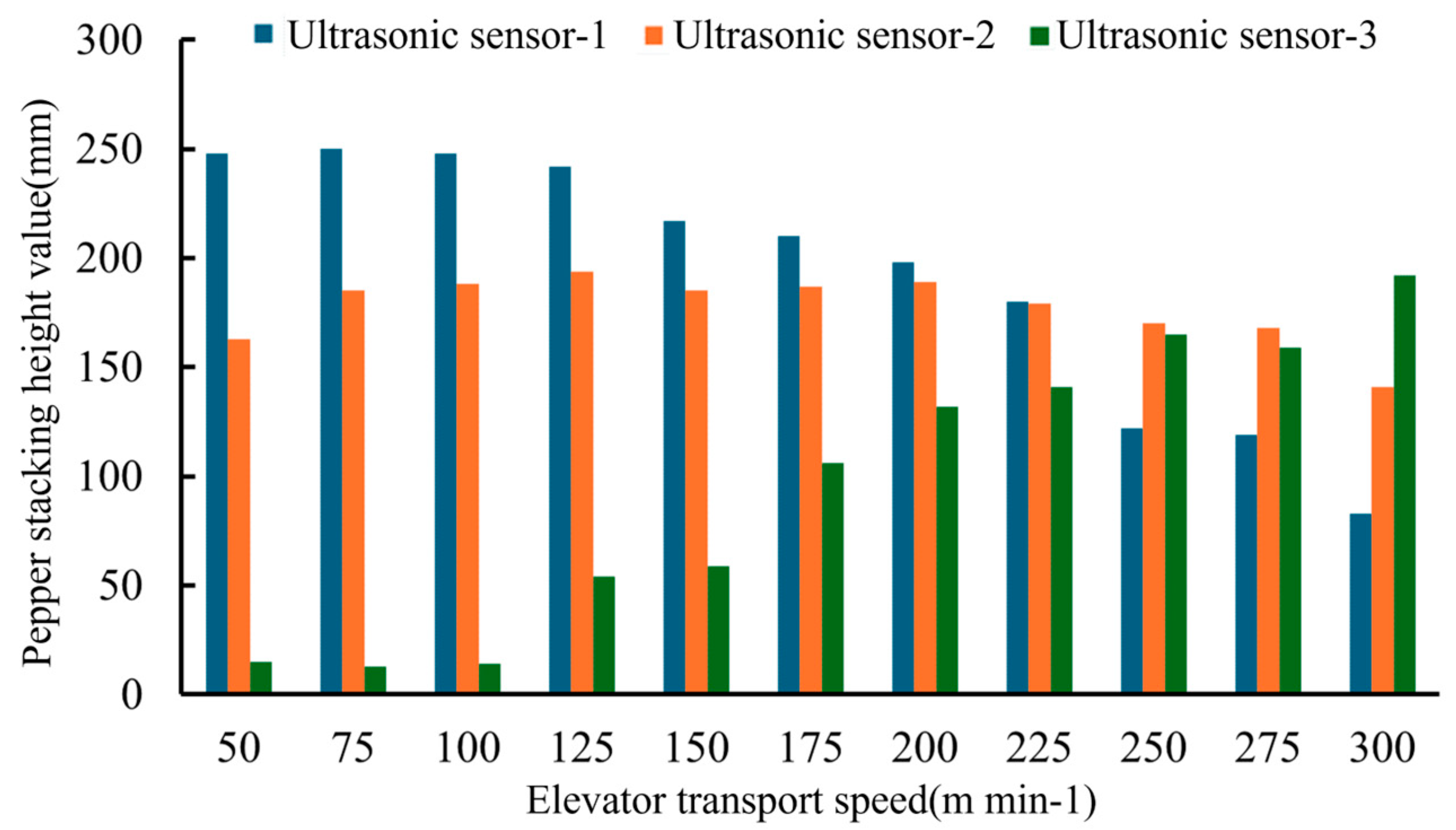
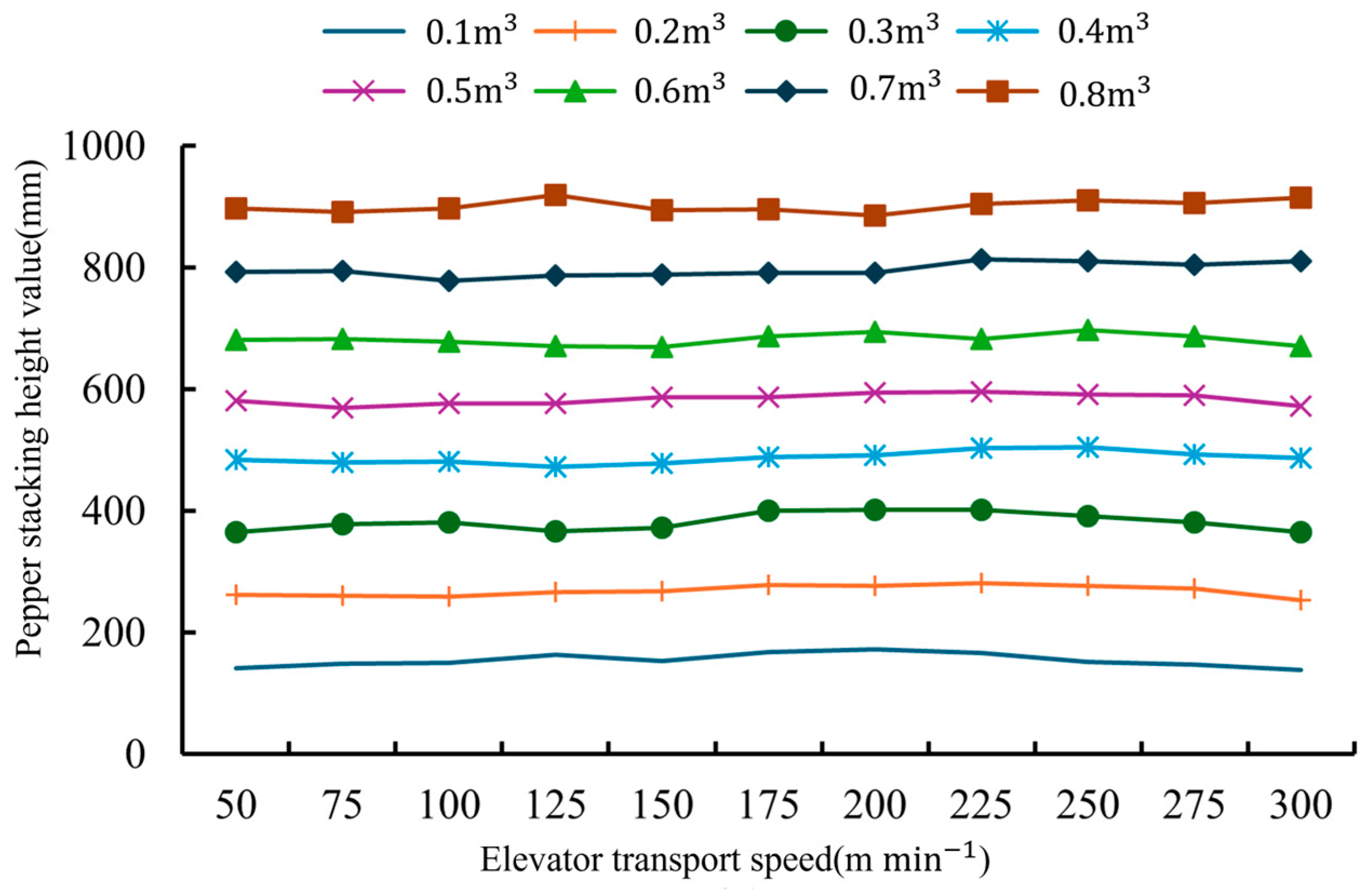
3.2.1. Detection Results of Pepper Stacking Height
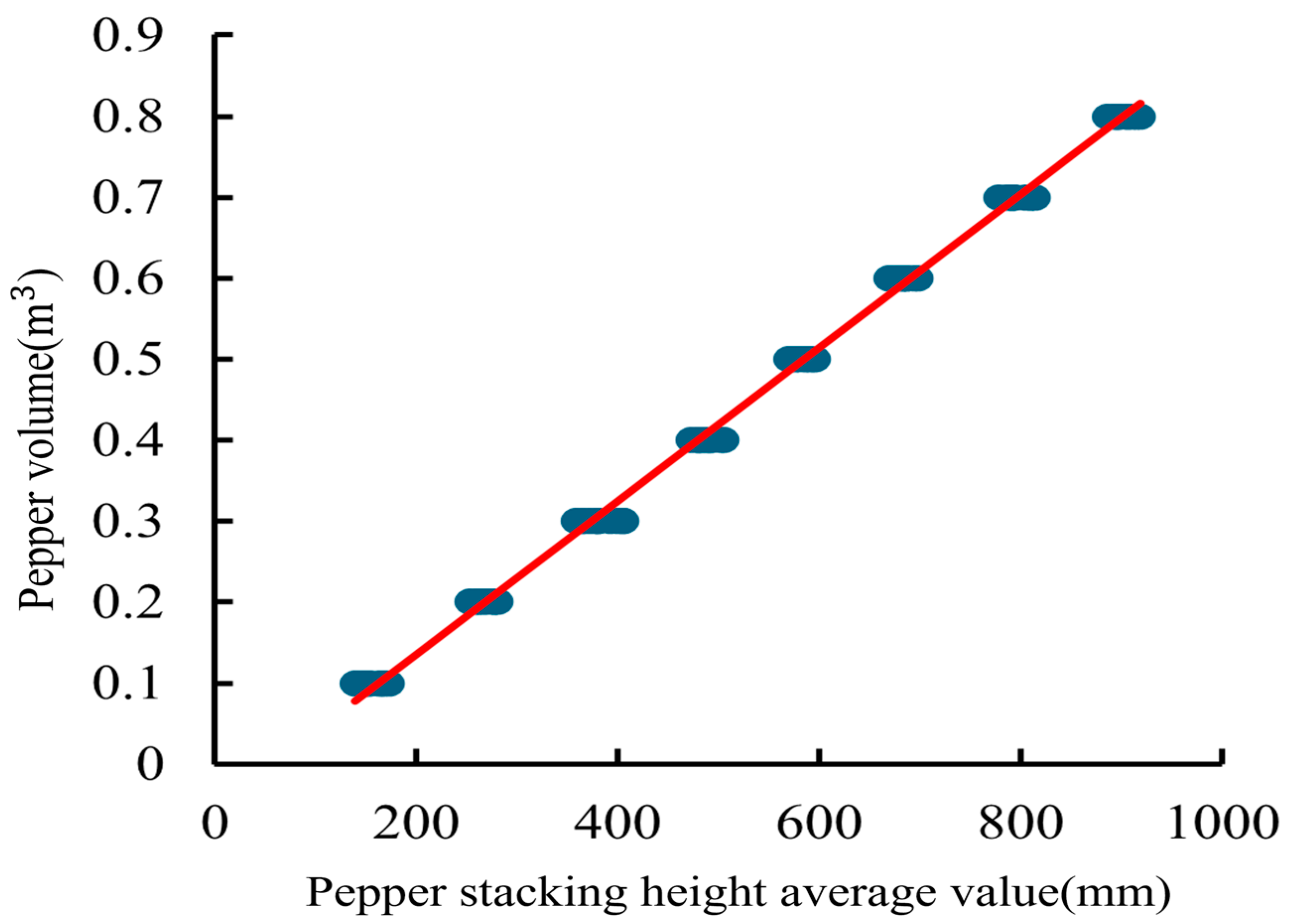
3.2.2. Construction of the Pepper Loading Capacity Detection Model
3.2.3. Validation Results of the Pepper Loading Capacity Detection Model
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hu, S.; Hu, M.; Yan, W.; Zhang, W. Design and Experiment of an Integrated Automatic Transplanting Mechanism for Picking and Planting Pepper Hole Tray Seedlings. Agriculture 2022, 12, 557. [Google Scholar] [CrossRef]
- Zou, X.; Ma, Y.; Dai, X.; Li, X.; Yang, S. Spread and Industry Development of Pepper in China. Acta Hortic. Sin. 2020, 47, 1715–1716. [Google Scholar] [CrossRef]
- Hernández-Pérez, T.; Gómez-García, M.; Valverde, M.; Paredes-López, O. Capsicum annuum (Hot Pepper): An Ancient Latin-American Crop with Outstanding Bioactive Compounds and Nutraceutical Potential. A Review. Compr. Rev. Food sci. Food saf. 2020, 19, 2972–2993. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Xiao, H.; Yang, X.; Bai, J.; Lou, Z.; Gao, Z. Effects of Pretreatment on Air Impingement Drying Characteristics and Product Color for Line Pepper. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2012, 28, 276–281. [Google Scholar] [CrossRef]
- Deng, L.; Liu, T.; Jiang, P.; Qi, A.; He, Y.; Li, Y.; Yang, M.; Deng, X. Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers. Agronomy 2023, 13, 2231. [Google Scholar] [CrossRef]
- Wu, D.; Ma, Z.; Zhang, J.; Xu, W.; He, H.; Li, Z. Simulation Analysis of Working Circuit Performance of Mountain Pepper Harvester Based on Improved Load-Sensitive System. Appl. Sci. 2023, 13, 10008. [Google Scholar] [CrossRef]
- Gupta, C.; Tewari, V.K.; Machavaram, R. Evaluation of a Laboratory-Based Prototype of a Comb-Type Picking Mechanism for Chili Pepper Harvester. Biosyst. Eng. 2022, 47, 69–78. [Google Scholar] [CrossRef]
- Zhai, Z.; Wang, X.; Wang, L.; Zhu, Z.; Du, Y.; Mao, E. Collaborative Path Planning for Autonomous Agricultural Machinery of Master Slave Cooperation. Trans. Chin. Soc. Agric. Mach. 2021, 52, 542–547. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, S.; Jin, R.; Zhao, L.; Dao, E.; Zheng, N.; Fu, W. Design and Experiment of Double Helix Pair Roller Pepper Harvesting Device. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2021, 37, 1–9. [Google Scholar] [CrossRef]
- Liu, D.; Wang, Z.; Bai, X.; Zhao, Y. Load Status Detection in Cooperative Operation of Harvester-Grain Cart. J. Agric. Mech. Res. 2021, 43, 254–258. [Google Scholar] [CrossRef]
- Li, H.; Yao, G.; Chen, L. Farm Machinery Monitoring and Scheduling System Based on GPS, GPRS, and GIS. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2008, 24, 119–122. [Google Scholar]
- Zhang, W.; Zhang, Z.; Zhang, F.; Ding, F.; Hu, L.; Lou, X. Cooperative Autonomous Operation Strategy and Experiment of the Rice Harvester Together with a Rice-Transporting Vehicle. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2022, 38, 1–9. [Google Scholar] [CrossRef]
- Jin, C.; Chai, Z.; Ni, Y.; Liu, Z. Research Review on Online Grain Yield Monitoring for Combine Harvester: Yield Sensing, Yield Mapping, and Dynamic Model. J. China Agric. Univ. 2020, 25, 137–152. [Google Scholar] [CrossRef]
- Li, C.; Qi, G.; Hang, C. Research on the Measuring Method of the Harvester Grain Yield Based on Weighing. J. Agric. Mech. Res. 2014, 36, 42–45. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, X.; Zhang, A.; Zhang, Y.; Yuan, Y. Method of Measuring Grain-Flow of Combine Harvester Based on Weighing. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2010, 26, 125–129. [Google Scholar]
- Schrock, M.D.; Oard, D.L.; Taylor, R.K.; Eisele, E.L.; Pringle, J.L. Diaphragm Impact Sensor for Measuring Combine Grain Flow. Appl. Eng. Agric. 1999, 15, 639–642. [Google Scholar] [CrossRef]
- Iida, M.; Kaho, T.; Lee, C.K.; Umeda, M.; Suguri, M. Measurement of Grain Yields in Japanese Paddy Field. In Proceedings of the Fourth International Conference on Precision Agriculture, St Paul, MN, USA, 19–22 July 1998; Robert, P.C., Rust, R.H., Larson, W.E., Eds.; Wiley: Hoboken, NJ, USA, 1999; Volume 48, pp. 293–300. [Google Scholar] [CrossRef]
- Liu, L.; Du, Y.; Li, X.; Sun, T.; Zhang, W.; Li, G.; Yang, L.; Chen, D.; Mao, E. An Automatic Forage Unloading Method Based on Machine Vision and Material Accumulation Model. Comput. Electron. Agric. 2023, 208, 107770. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, Z.; An, X.; Zhao, C.; Li, C.; Yu, J. Development and Performance Experiment on Grain Yield Monitoring System of Combine Harvester Based on Photoelectric Diffuse Reflectance. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2017, 33, 24–30. [Google Scholar] [CrossRef]
- Yang, G.; Lei, J.; Liu, C.; Tao, J. Development of Yield Monitoring System with High-Precision Based on Linear Structured Light Source and Machine Vision. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2019, 35, 21–28. [Google Scholar] [CrossRef]
- Jiang, X.; Yin, W.; Pu, H.; Hu, F.; Chen, C.; Li, X. Measurement Method of Grain Volume on Screw Conveyor Based on Structured Light of 3D Vision. J. Nanjing Agric. Univ. 2019, 42, 373–381. [Google Scholar] [CrossRef]
- Zhao, X.; Zhai, C.; Wang, S.; Dou, H.; Yang, S.; Wang, X.; Chen, L. Sprayer Boom Height Measurement in Wheat Field Using Ultrasonic Sensor: An Exploratory study. Front. Plant Sci. 2022, 13, 1008122. [Google Scholar] [CrossRef]
- Dou, H.; Zhai, C.; Chen, L.; Wang, S.; Wang, X. Field Variation Characteristics of Sprayer Boom Height Using a Newly Designed Boom Height Detection System. IEEE Access 2021, 9, 17148–17160. [Google Scholar] [CrossRef]
- Zhao, X.; Zheng, S.; Yi, K.; Wang, X.; Zou, W.; Zhai, C. Design and experiment of the target-oriented spraying system for field vegetable considering spray height. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2022, 38, 1–11. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.; Mou, H.; Fan, L.; Fu, S.; Zhu, C. Design and Experiment of Moving Along Ridge Control System for Tobacco Picking Machine. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2015, 31, 83–87. [Google Scholar] [CrossRef]
- Wang, L.; Zou, X.; Liu, S.; Chen, B.; Zhu, H.; Zhu, R. Infrared Distance Measurement Used for Cotton Picker Robot. Trans. Chin. Soc. Agric. Mach. 2014, 45, 61–66. [Google Scholar] [CrossRef]
- Kumar, N.; Vámossy, Z. Robot Navigation in Unknown Environment with Obstacle Recognition Using Laser Sensor. Int. J. Electr. Comput. Eng. 2019, 3, 1773–1779. [Google Scholar] [CrossRef]
- Wen, S.; Chen, X.; Ma, C.; Lam, H.K.; Hua, S. The Q-learning Obstacle Avoidance Algorithm Based on EKF-SLAM for NAO Autonomous Walking Under Unknown Environments. Robot. Auton. Syst. 2015, 72, 29–36. [Google Scholar] [CrossRef]
- Ilmi, M.; Azhar, B.; Anderson, C.A.; Hanafiah, Y. Real-Time Obstacle Avoidance for Humanoid-Controlled Mobile Platform Navigation. Procedia Comput. Sci. 2017, 105, 34–39. [Google Scholar] [CrossRef]
- Jin, C.; Cai, Z.; Yang, T.; Liu, Z.; Yin, X.; Da, F. Design and Experiment of Yield Monitoring System of Grain Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2022, 53, 125–135. [Google Scholar] [CrossRef]
- Zeng, H.; Lei, J.; Tao, J.; Liu, C. Yield Monitoring for Grain Combine Harvester Based on Monocular Vision. Trans. Chin. Soc. Agric. Mach. 2021, 52, 281–289. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Relational Expressions | R2 | |
|---|---|---|---|
| Ultrasonic sensor | 1 | − 745.56 | 0.9999 |
| 2 | − 746.72 | 0.9999 | |
| 3 | − 743.86 | 0.9999 | |
| Infrared distance sensor | 1 | − 1.007 | 0.9982 |
| 2 | − 1.038 | 0.9983 | |
| 3 | − 1.037 | 0.9987 | |
| Sensors | Detection Values (mm) | Difference (mm) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Maximum | Minimum | RMSE | ||||||||||||||||
| Ultrasonic sensor | 1 | 209 | 400 | 605 | 803 | 1005 | 1207 | 1407 | 1596 | 1798 | 1998 | 2196 | 2395 | 2600 | 2798 | 9 | 0 | 4.7 |
| 2 | 208 | 410 | 611 | 809 | 1009 | 1208 | 1403 | 1606 | 1808 | 2006 | 2209 | 2410 | 2611 | 2808 | 11 | 3 | 8.5 | |
| 3 | 203 | 400 | 603 | 804 | 1002 | 1203 | 1401 | 1592 | 1798 | 1995 | 2198 | 2398 | 2596 | 2800 | 8 | 0 | 3.4 | |
| Laser radar sensor | 1 | 216 | 407 | 613 | 815 | 1010 | 1214 | 1410 | 1609 | 1810 | 2010 | 2220 | 2421 | 2617 | 2811 | 23 | 7 | 13.7 |
| 2 | 227 | 417 | 616 | 816 | 1018 | 1211 | 1412 | 1597 | 1802 | 1996 | 2197 | 2396 | 2591 | 2795 | 21 | 2 | 12.8 | |
| 3 | 206 | 419 | 624 | 818 | 1017 | 1215 | 1419 | 1613 | 1814 | 2004 | 2211 | 2419 | 2617 | 2819 | 24 | 4 | 16.2 | |
| Infrared distance sensor | 1 | 226 | 280 | 363 | 458 | 559 | 665 | 764 | 873 | 981 | 1085 | 1194 | 1320 | 1427 | 1504 | 42 | 4 | 27.9 |
| 2 | 234 | 276 | 359 | 450 | 545 | 640 | 744 | 840 | 923 | 1059 | 1140 | 1281 | 1375 | 1446 | 77 | 19 | 49.6 | |
| 3 | 234 | 287 | 378 | 476 | 583 | 688 | 786 | 897 | 1007 | 1120 | 1206 | 1324 | 1420 | 1510 | 34 | 3 | 18.1 | |
| Elevator Transport Speed (m min−1) | Pepper Volume (m3) | Pepper Stacking Height Value (mm) | ||
|---|---|---|---|---|
| Ultrasonic Sensor-1 | Ultrasonic Sensor-2 | Ultrasonic Sensor-3 | ||
| 50 | 0.1 | 248 | 163 | 15 |
| 0.2 | 377 | 282 | 126 | |
| 0.3 | 486 | 365 | 244 | |
| 0.4 | 622 | 479 | 353 | |
| 0.5 | 698 | 598 | 448 | |
| 0.6 | 824 | 680 | 544 | |
| 0.7 | 964 | 772 | 643 | |
| 0.8 | 1049 | 889 | 755 | |
| 75 | 0.1 | 250 | 185 | 13 |
| 0.2 | 369 | 285 | 129 | |
| 0.3 | 494 | 394 | 246 | |
| 0.4 | 612 | 480 | 349 | |
| 0.5 | 695 | 576 | 441 | |
| 0.6 | 806 | 723 | 521 | |
| 0.7 | 936 | 812 | 635 | |
| 0.8 | 1039 | 880 | 756 | |
| 100 | 0.1 | 248 | 188 | 14 |
| 0.2 | 346 | 302 | 129 | |
| 0.3 | 491 | 403 | 250 | |
| 0.4 | 609 | 488 | 345 | |
| 0.5 | 679 | 604 | 447 | |
| 0.6 | 816 | 689 | 531 | |
| 0.7 | 920 | 780 | 636 | |
| 0.8 | 1033 | 896 | 765 | |
| 125 | 0.1 | 242 | 194 | 54 |
| 0.2 | 353 | 293 | 152 | |
| 0.3 | 469 | 384 | 246 | |
| 0.4 | 595 | 471 | 350 | |
| 0.5 | 666 | 621 | 445 | |
| 0.6 | 792 | 695 | 526 | |
| 0.7 | 919 | 799 | 643 | |
| 0.8 | 1031 | 900 | 828 | |
| 150 | 0.1 | 217 | 185 | 59 |
| 0.2 | 337 | 304 | 164 | |
| 0.3 | 461 | 394 | 261 | |
| 0.4 | 574 | 483 | 379 | |
| 0.5 | 663 | 622 | 478 | |
| 0.6 | 757 | 685 | 566 | |
| 0.7 | 902 | 814 | 650 | |
| 0.8 | 1018 | 906 | 758 | |
| 175 | 0.1 | 210 | 187 | 106 |
| 0.2 | 316 | 304 | 218 | |
| 0.3 | 462 | 428 | 309 | |
| 0.4 | 573 | 500 | 395 | |
| 0.5 | 649 | 606 | 505 | |
| 0.6 | 771 | 711 | 580 | |
| 0.7 | 892 | 824 | 661 | |
| 0.8 | 1003 | 919 | 767 | |
| 200 | 0.1 | 198 | 189 | 132 |
| 0.2 | 300 | 304 | 226 | |
| 0.3 | 437 | 422 | 349 | |
| 0.4 | 556 | 520 | 401 | |
| 0.5 | 634 | 610 | 541 | |
| 0.6 | 748 | 722 | 612 | |
| 0.7 | 857 | 829 | 689 | |
| 0.8 | 974 | 918 | 765 | |
| 225 | 0.1 | 180 | 179 | 141 |
| 0.2 | 299 | 294 | 250 | |
| 0.3 | 429 | 415 | 374 | |
| 0.4 | 526 | 540 | 444 | |
| 0.5 | 608 | 621 | 560 | |
| 0.6 | 707 | 718 | 625 | |
| 0.7 | 851 | 841 | 750 | |
| 0.8 | 964 | 937 | 815 | |
| 250 | 0.1 | 122 | 170 | 165 |
| 0.2 | 272 | 299 | 260 | |
| 0.3 | 387 | 418 | 371 | |
| 0.4 | 513 | 515 | 488 | |
| 0.5 | 596 | 609 | 570 | |
| 0.6 | 714 | 729 | 652 | |
| 0.7 | 823 | 841 | 770 | |
| 0.8 | 935 | 945 | 853 | |
| 275 | 0.1 | 119 | 168 | 159 |
| 0.2 | 254 | 292 | 271 | |
| 0.3 | 363 | 394 | 386 | |
| 0.4 | 465 | 515 | 499 | |
| 0.5 | 563 | 619 | 589 | |
| 0.6 | 684 | 710 | 666 | |
| 0.7 | 806 | 837 | 773 | |
| 0.8 | 917 | 938 | 867 | |
| 300 | 0.1 | 83 | 141 | 192 |
| 0.2 | 225 | 268 | 267 | |
| 0.3 | 316 | 388 | 373 | |
| 0.4 | 459 | 506 | 497 | |
| 0.5 | 542 | 593 | 580 | |
| 0.6 | 638 | 697 | 679 | |
| 0.7 | 788 | 831 | 811 | |
| 0.8 | 908 | 939 | 898 | |
| Sensors | Pepper Volume (m3) | Pepper Stacking Height Average Value (mm) | Root Mean Squared Error (mm) | |
|---|---|---|---|---|
| Maximum | Minimum | |||
| 1 and 2 | 0.1 | 218 | 112 | 34.1 |
| 0.2 | 329 | 246 | 25.1 | |
| 0.3 | 447 | 352 | 28.4 | |
| 0.4 | 550 | 483 | 21.6 | |
| 0.5 | 648 | 567 | 24.2 | |
| 0.6 | 764 | 668 | 26.6 | |
| 0.7 | 874 | 809 | 18.9 | |
| 0.8 | 969 | 923 | 15.1 | |
| 1 and 3 | 0.1 | 165 | 131 | 11.7 |
| 0.2 | 274 | 237 | 10.4 | |
| 0.3 | 402 | 344 | 16.1 | |
| 0.4 | 500 | 473 | 6.9 | |
| 0.5 | 587 | 555 | 9.7 | |
| 0.6 | 684 | 658 | 9.2 | |
| 0.7 | 804 | 773 | 10.7 | |
| 0.8 | 929 | 870 | 13.8 | |
| 2 and 3 | 0.1 | 168 | 89 | 28.7 |
| 0.2 | 281 | 204 | 28.6 | |
| 0.3 | 395 | 304 | 34.7 | |
| 0.4 | 507 | 411 | 37.8 | |
| 0.5 | 604 | 508 | 31.3 | |
| 0.6 | 690 | 610 | 31.9 | |
| 0.7 | 821 | 707 | 40.8 | |
| 0.8 | 918 | 818 | 33.6 | |
| 1, 2, and 3 | 0.1 | 173 | 139 | 10.5 |
| 0.2 | 281 | 253 | 8.8 | |
| 0.3 | 402 | 365 | 11.5 | |
| 0.4 | 505 | 472 | 9.6 | |
| 0.5 | 596 | 570 | 8.7 | |
| 0.6 | 698 | 669 | 8.9 | |
| 0.7 | 814 | 778 | 11.0 | |
| 0.8 | 919 | 886 | 9.8 | |
| Actual Volume (m3) | Detection Volume (m3) | Relative Error (%) | ||||||
|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | Maximum | Average | |
| 0.1 | 0.090 | 0.108 | 0.106 | 0.091 | 0.074 | 0.070 | 31.00 | 14.55 |
| 0.2 | 0.194 | 0.200 | 0.215 | 0.211 | 0.190 | 0.173 | 13.50 | 5.41 |
| 0.3 | 0.291 | 0.292 | 0.305 | 0.306 | 0.292 | 0.272 | 9.33 | 3.33 |
| 0.4 | 0.401 | 0.402 | 0.395 | 0.404 | 0.406 | 0.380 | 5.00 | 1.93 |
| 0.5 | 0.514 | 0.504 | 0.491 | 0.505 | 0.508 | 0.490 | 3.20 | 1.50 |
| 0.6 | 0.599 | 0.596 | 0.595 | 0.606 | 0.614 | 0.609 | 2.30 | 1.10 |
| 0.7 | 0.699 | 0.697 | 0.694 | 0.702 | 0.710 | 0.702 | 1.70 | 0.66 |
| 0.8 | 0.796 | 0.788 | 0.788 | 0.794 | 0.805 | 0.810 | 2.50 | 1.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wang, X.; Song, J.; Chen, M.; Li, C.; Zhai, C. Online Detection of Loading Capacity in Mechanized Pepper Harvesting Using Ultrasonic Sensors. Agronomy 2024, 14, 1955. https://doi.org/10.3390/agronomy14091955
Liu H, Wang X, Song J, Chen M, Li C, Zhai C. Online Detection of Loading Capacity in Mechanized Pepper Harvesting Using Ultrasonic Sensors. Agronomy. 2024; 14(9):1955. https://doi.org/10.3390/agronomy14091955
Chicago/Turabian StyleLiu, Haowei, Xiu Wang, Jian Song, Mingzhou Chen, Cuiling Li, and Changyuan Zhai. 2024. "Online Detection of Loading Capacity in Mechanized Pepper Harvesting Using Ultrasonic Sensors" Agronomy 14, no. 9: 1955. https://doi.org/10.3390/agronomy14091955