
Design and Experiment of an Inter-Row Weeding Machine Applied in Soybean and Corn Strip Compound Planting (SCSCP)




Abstract
1. Introduction
2. Materials and Methods
2.1. Weeding Environment and Agronomic Requirements
2.2. Machine Design
2.2.1. Overall Structure
2.2.2. Working Principle
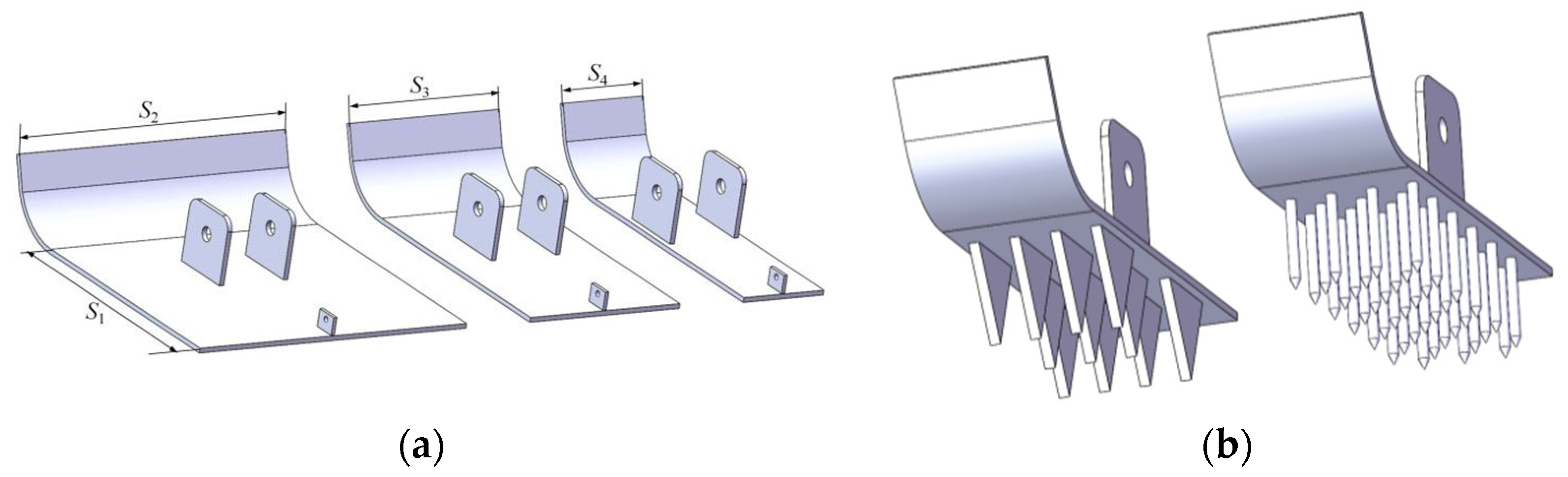
2.2.3. Reciprocating Weeding Shovel Design
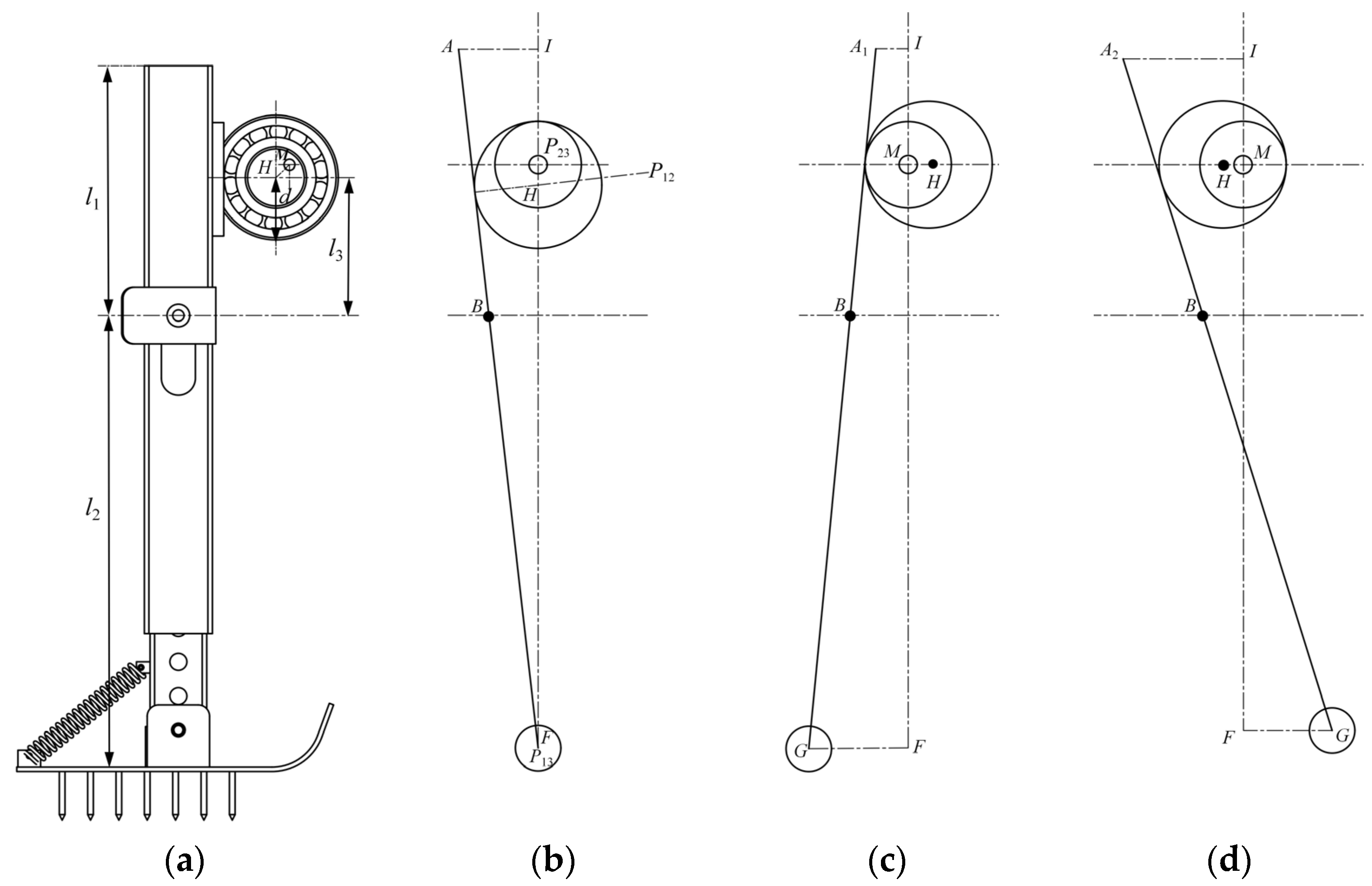
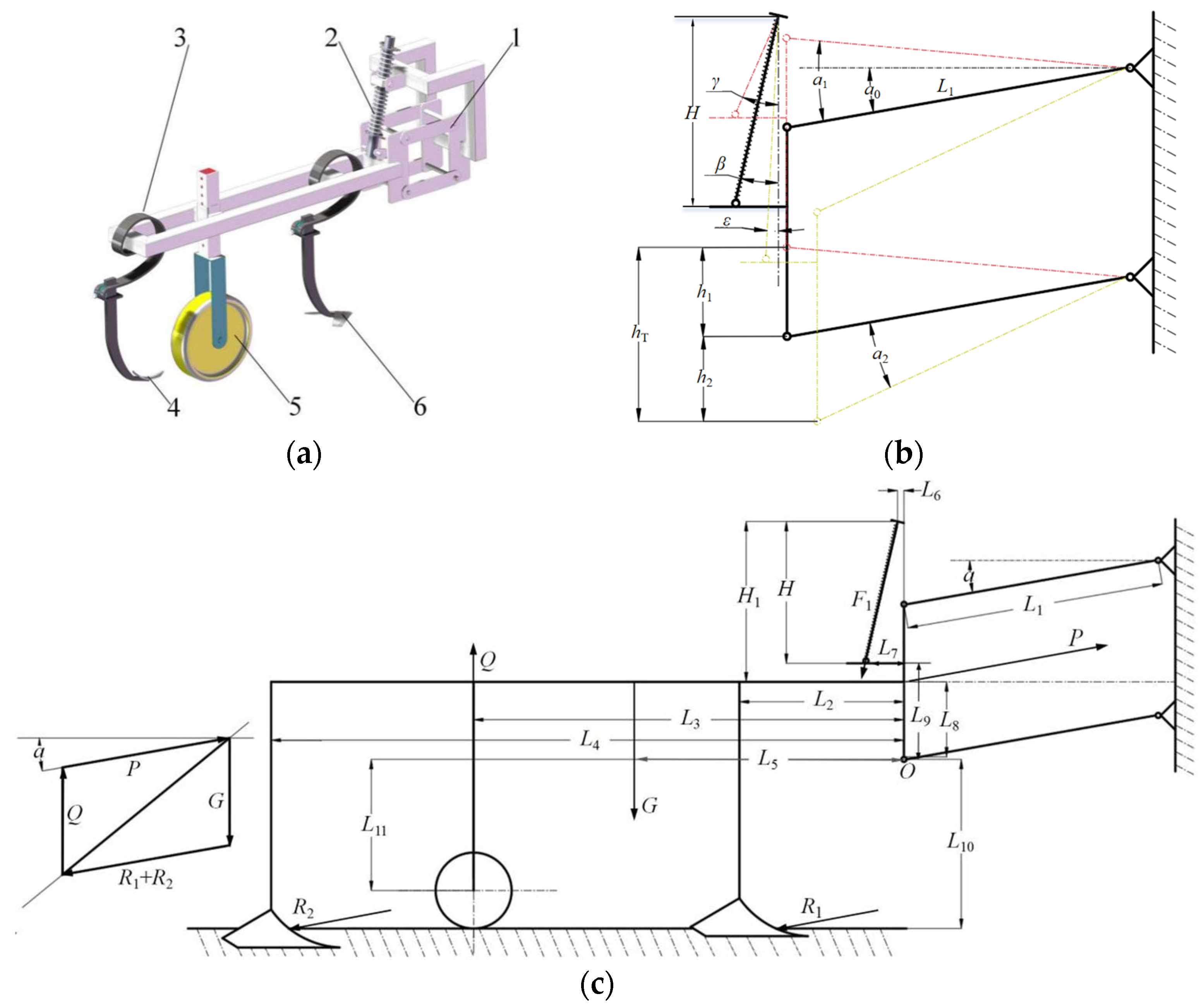
2.2.4. Design of the Adaptive Contouring Mechanism for Cultivation and Soil Loosening
2.3. Discrete Element Simulation Analysis of the Weeding Shovel–Soil Interaction
2.4. Field Experiment
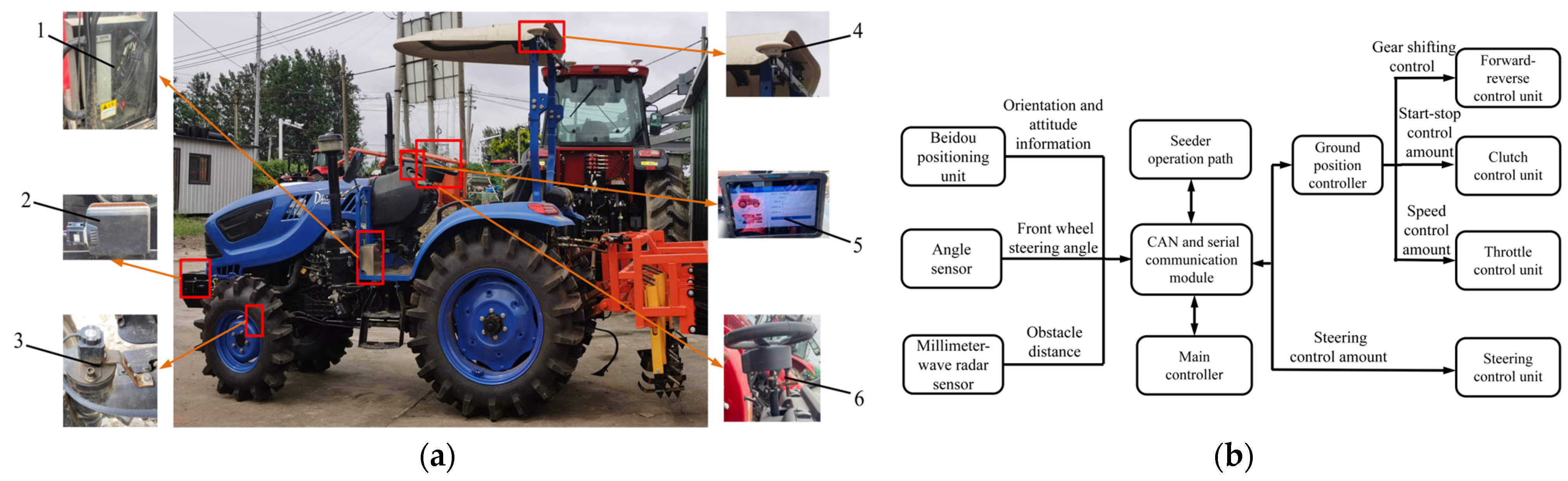
2.4.1. Tractor Modification
2.4.2. Field Experiment Design
3. Results
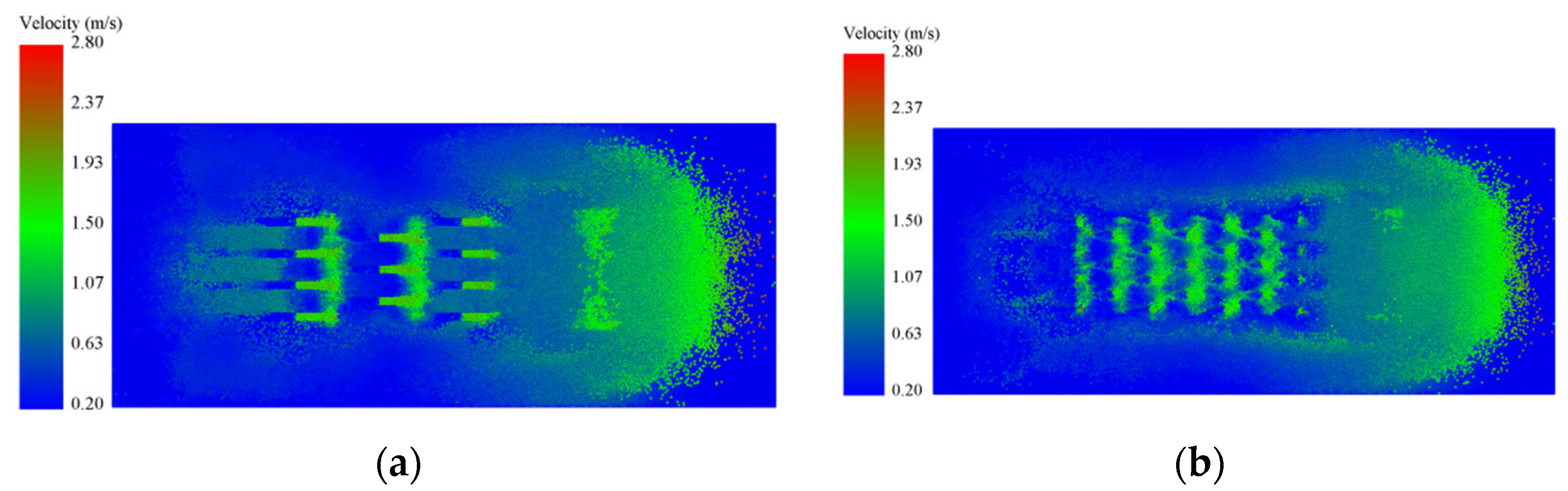
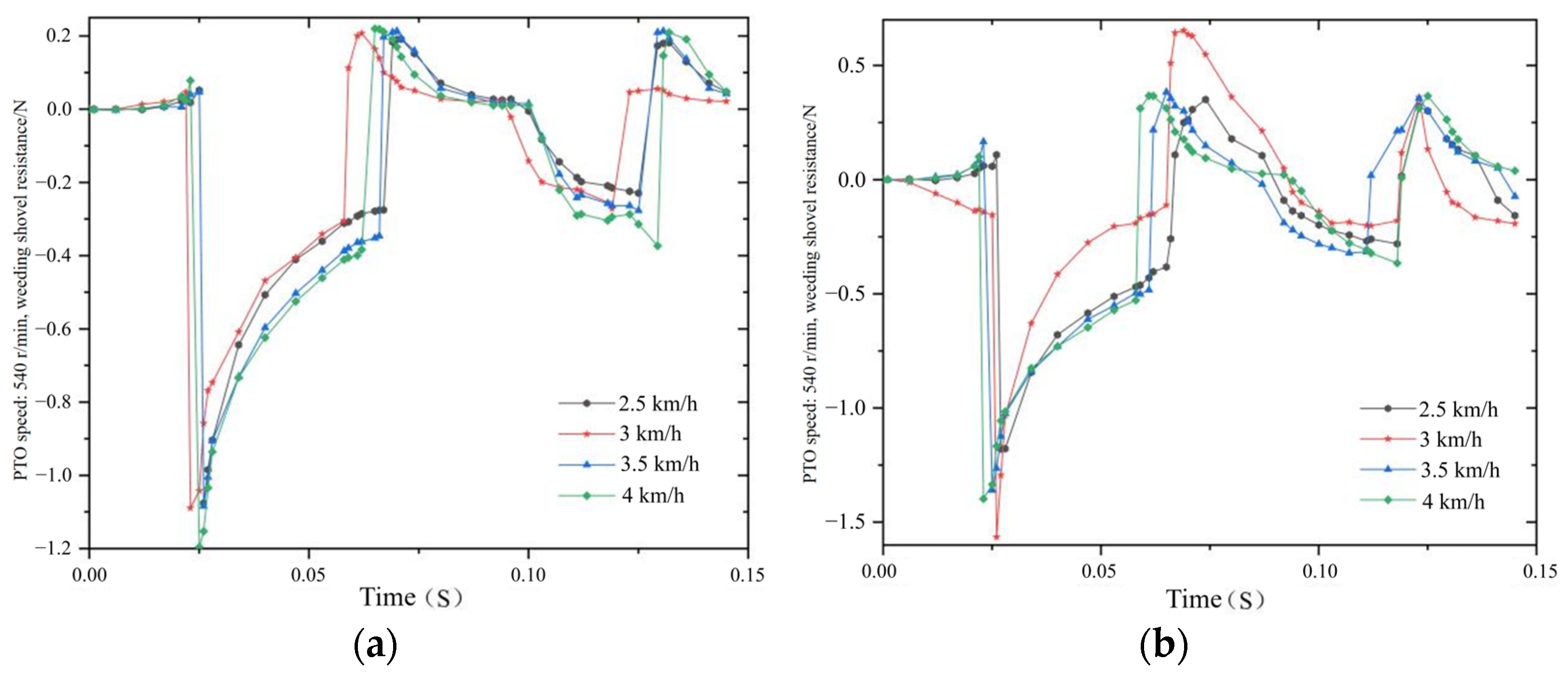
3.1. Simulation Results and Analysis
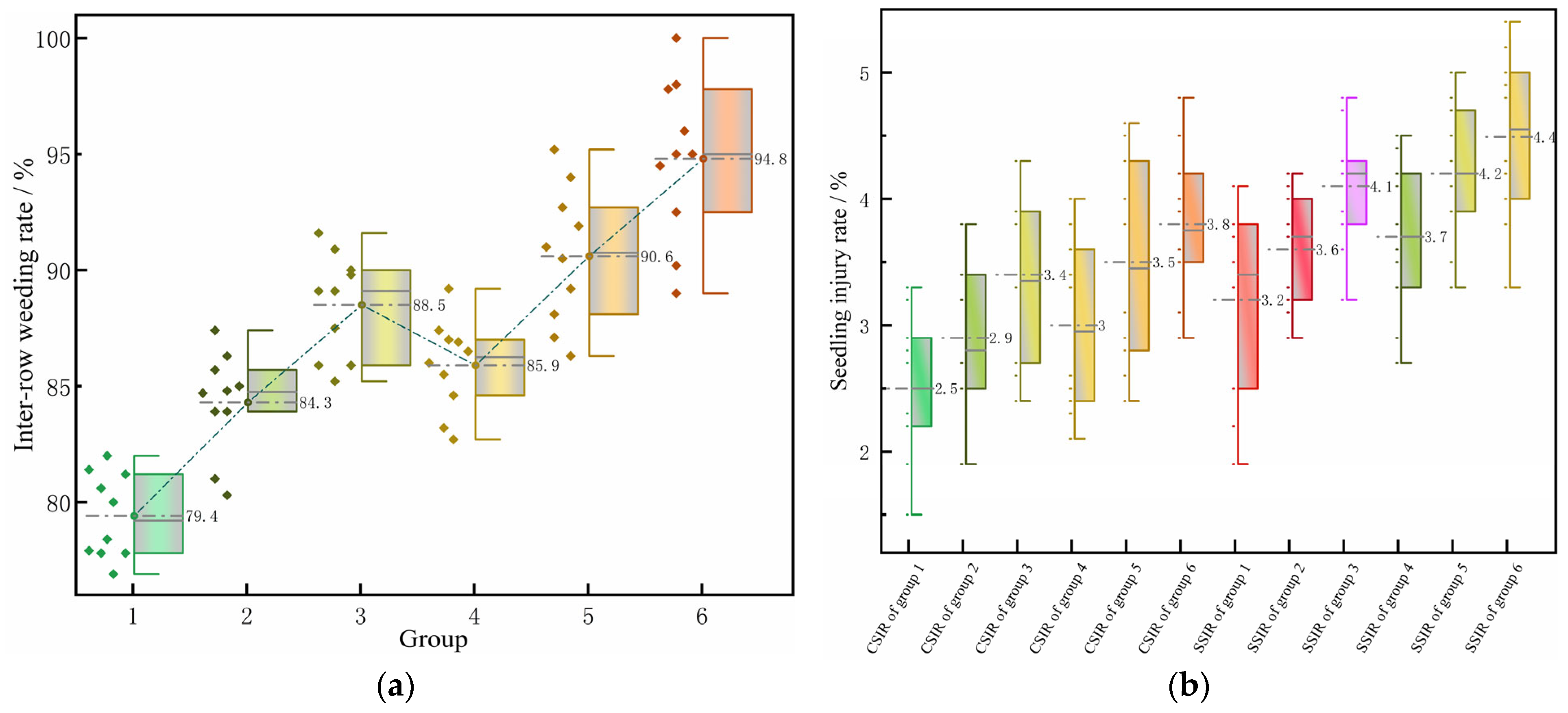
3.2. Field Experiment Results and Analysis
4. Discussion
5. Conclusions
- (1)
- An inter-row weeding machine designed explicitly for SCSCP has been developed. This weeder employs a multi-layered mechanical weeding approach that integrates reciprocating weeding shovels, double-wing weeding shovels, and double-pointed soil-loosening shovels. This configuration ensures effective weed control while simultaneously loosening the soil, aligning with the agronomic requirements of SCSCP.
- (2)
- A reciprocating motion mechanism has been designed, featuring a weed shovel swing amplitude of 140 mm, an eccentric wheel with a contoured radius of 50 mm, and an eccentricity of 19.71 mm. Mathematical modeling and mechanical analysis were conducted for the adaptive contour-following mechanism based on practical considerations. Consequently, a parallelogram linkage mechanism with upper and lower link lengths of 200 mm was selected, complemented by a contour-limiting depth wheel with a diameter of 304.8 mm. The contour-following solution incorporates a spring with a stiffness coefficient of 8000 N/mm, 16 coils, a wire diameter of 5 mm, and a central diameter of 22 mm.
- (3)
- Through a combination of discrete element simulations and field trials, the tooth profile of the reciprocating weeding shovel was optimized, and the optimal operating power conditions were determined. Under the optimal working combination of a blade-tooth weeding structure, a forward speed of 3.5 km/h, and a power take-off shaft speed of 760 r/min, the weeding shovel achieved the best soil disturbance effect with relatively low working resistance. It was confirmed that in conditions of operation at a depth of 3–5 cm, the average inter-row weeding rate of the machine reached 90.4%, with a corn seedling injury rate of 3.5% and a soybean seedling injury rate of 4.2%. The results demonstrate that this weeding machine exhibits excellent operational performance, fulfilling the technical requirements for mechanical weeding in soybean–corn intercropping systems.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luo, X.; Liao, J.; Hu, L.; Zang, Y.; Zhou, Z. Improving agricultural mechanization level to promote agricultural sustainable development. Trans. Chin. Soc. Agric. Eng. 2016, 1, 1–11. [Google Scholar]
- Wei, X.; Zhu, M.; Liao, Y. Promoting agricultural engineering to ensure food security in China. Sci. Technol. Rev. 2023, 20, 5–19. [Google Scholar]
- Yang, J.; Huang, Z.; Zhang, X.; Reardon, T. The rapid rise of cross-regional agricultural mechanization services in China. Am. J. Agric. Econ. 2013, 95, 1245–1251. [Google Scholar] [CrossRef]
- Zhou, X.; Ma, W.; Li, G.; Qiu, H. Farm machinery use and maize yields in China: An analysis accounting for selection bias and heterogeneity. Aust. J. Agric. Resour. Econ. 2020, 64, 1282–1307. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Y.; Li, J.; Si, W. Development trends and policy suggestions of soybean industry in 2024. Soybean Sci. Technol. 2024, 1, 1–5. [Google Scholar]
- Huang, Q.; Kang, Y.; Zhang, D. Impact of trade disputes between China and the United States on Chinese corn production and consumption. J. Henan Agric. Univ. 2024, 58, 318–324. [Google Scholar]
- Du, J.B.; Han, T.F.; Gai, J.Y.; Yong, T.W.; Sun, X.; Wang, X.C.; Yang, F.; Liu, J.; Shu, K.; Liu, W.G.; et al. Maize-soybean strip intercropping: Achieved a balance between high productivity and sustainability. J. Integr. Agric. 2018, 17, 747–754. [Google Scholar] [CrossRef]
- Luo, Y. Screening and Evaluation of Safe Compatibility Herbicide Formulations for Soybean and Corn; Jilin Agricultural University: Changchun, China, 2024. [Google Scholar]
- Taylor, E.C.; Renner, K.A.; Sprague, C.L. Organic weed management in field crops with a propane flamer and rotary hoe. Weed Technol. 2012, 26, 793–799. [Google Scholar] [CrossRef]
- Sharma, B.; Singh, S.R.; Gupta, S.; Shrivastava, M.K.; Verma, S. Improving efficiency and reduction in drudgery of farm women in weeding activity by twin wheel hoe. Indian Res. J. Ext. Educ. 2016, 15, 76–80. [Google Scholar]
- Shen, S.; He, Y.; Tang, Z.; Dai, Y.; Wang, Y.; Ma, J. Development of an orchard mowing and sweeping device based on an ADAMS–EDEM simulation. Agriculture 2023, 13, 2276. [Google Scholar] [CrossRef]
- Melander, B. Optimization of the adjustment of a vertical axis rotary brush weeder for intra-row weed control in row crops. J. Agric. Eng. Res. 1997, 68, 39–50. [Google Scholar] [CrossRef]
- Meyers, J.M.; Miles, J.A.; Faucett, J.; Ira Janowitz, M.F.; Tejeda, C.D.; Weber, E.; Smith, R.; Garcia, L. Priority risk factors for back injury in agricultural field work vineyard ergonomics. J. Agromed. 2002, 8, 39–54. [Google Scholar] [CrossRef]
- Kwon, T.H.; Kim, J.; Lee, C.; Kang, T.G.; Lee, B.M.; Rhee, J.Y. A study on rotary weeding blade installation angle for reduction of hand vibration in working type cultivator. J. Biosyst. Eng. 2014, 39, 11–20. [Google Scholar] [CrossRef]
- Wang, B. The Design and Experimental Research of Weeding Plant between Soybean Seedlings; Northeast Agricultural University: Harbin, China, 2019. [Google Scholar]
- Han, B.; Guo, C.; Gao, Y.; Liu, Q.; Sun, S.; Dong, X. Design and experiment of soybean intra-row weeding monomer mechanism and key components. Trans. Chin. Soc. Agric. Mach. 2020, 51, 112–121. [Google Scholar]
- Richard, D.; Leimbrock-Rosch, L.; Keßler, S.; Stoll, E.; Zimmer, S. Soybean yield response to different mechanical weed control methods in organic agriculture in Luxembourg. Eur. J. Agron. 2023, 147, 126842. [Google Scholar] [CrossRef]
- Quan, L.; Jiang, W.; Li, H.; Wang, Q.; Chen, L. Intelligent intra-row robotic weeding system combining deep learning technology with a targeted weeding mode. Biosyst. Eng. 2022, 216, 13–31. [Google Scholar] [CrossRef]
- Cordill, C.; Grift, T.E. Design and testing of an intra-row mechanical weeding machine for corn. Biosyst. Eng. 2011, 110, 247–252. [Google Scholar] [CrossRef]
- Hemming, J.; de Jong, H.; Struik, L.; van Meer, J.; Van Henten, E.J. Field performance evaluation method for a machine vision based intra row hoeing machine. Proc. Eur. Conf. Agric. Eng. AgEng 2018, 2018, 188–196. [Google Scholar]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Lehnert, C.; Perez, T. Robot for weed species plant—Specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Bai, Z.; Li, H.; Bai, H.; Wan, Y.; Liu, N.; Liu, D.; Li, Z.; Jin, C. Control efficacy on weeds and safety of pyroxasulfone and thifensulfuron-methyl in soybean-corn intercropping field. Agrochemicals 2024, 63, 73–78. [Google Scholar]
- Wang, X.; Xi, X.; Chen, M.; Huang, S.; Jin, Y.; Zhang, R. Development status of soybean and corn ribbon compound planting technology and equipment. Jiangsu Agric. Sci. 2023, 51, 36–45. [Google Scholar]
- Li, R.; Luo, Y.; Li, S.; Xie, R.; Zheng, H.; Wang, H.; Liu, W.; Zheng, J. Effects of mechanical and chemical weed control on maize and soybean in no-tillage with straw mulch. J. Northeast Agric. Sci. 2019, 44, 1–6. [Google Scholar]
- Zhou, Z.; Hao, L.; Gan, L.; Lu, H.; Wang, C.; Li, R.; Yu, Z. Field experiment effect of chemical herbicide under belt compound planting mode of soybean and corn. Shaanxi J. Agric. Sci. 2023, 69, 71–74. [Google Scholar]
- Yang, Y. The Design and Experimental Research on Working Depth Control System of Soybean Intra-row Mechanical Weeding; Northeast Agricultural University: Harbin, China, 2018. [Google Scholar]
- Wang, W. Design and Experimental Study on Mechanical Weeding Device of the Ripple Maize; Northeast Agricultural University: Harbin, China, 2018. [Google Scholar]
- Chandel, N.S.; Chandel, A.K.; Roul, A.K.; Solanke, K.R.; Mehta, C.R. An integrated inter-and intra-row weeding system for row crops. Crop Prot. 2021, 145, 105642. [Google Scholar] [CrossRef]
- Jiao, J.; Hu, L.; Chen, G.; Tu, T.; Wang, Z.; Zang, Y. Design and experiment of an inter-row weeding equipment applied in paddy field. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–12. [Google Scholar]
- Bručienė, I.; Buragienė, S.; Šarauskis, E. Weeding Effectiveness and Changes in Soil Physical Properties Using Inter-Row Hoeing and a Robot. Agronomy 2022, 12, 1514. [Google Scholar] [CrossRef]
- Gao, C.; Li, X.; Liu, Y.; Jia, R.; Zhang, H.; Liu, J. Processes and Modelling of Soil Compaction in Farmland: A Review. Soils 2024, 56, 1–9. [Google Scholar]
- O’Sullivan, M.F.; Simota, C. Modeling the environmental impacts of soil compaction: A review. Soil Tillage Res. 1995, 35, 69–84. [Google Scholar] [CrossRef]
- Xi, X.; Wang, X.; Jin, Y.; Zhang, Y.; Zhu, Z.; Zhang, B.; Qu, J.; Zhang, R. A Compound Seeding Apparatus. China Patent CN219068883U, 26 May 2023. [Google Scholar]
- Wang, Y.; Xi, X.; Chen, M.; Shi, Y.; Zhang, Y.; Zhang, B.; Qu, J.; Zhang, R. Design of and Experiment on Reciprocating Inter-Row Weeding Machine for Strip-Seeded Rice. Agriculture 2022, 12, 1956. [Google Scholar] [CrossRef]
- Jiang, Y.; Qi, L.; Gong, H.; Liu, C.; Tao, M.; Hu, X.; Chen, Q. Design and experiment of pneumatic paddy intra-row weeding device. J. South China Agric. Univ. 2020, 41, 37–49. [Google Scholar]
- Jia, H.; Li, S.; Wang, G.; Liu, H. Design and experiment of seedling avoidable weeding control device for intertillage maize (Zea mays L.). Trans. Chin. Soc. Agric. Eng. 2018, 34, 15–22. [Google Scholar]
- Gagliardi, L.; Luglio, S.M.; Peruzzi, A.; Fontanelli, M.; Frasconi, C.; Raffaelli, M. Comparative Analysis of the Performance of a Chain Mower and Tools That Perform Under-Row Weed Control with Tillage in the Vineyard. Agronomy 2024, 14, 206. [Google Scholar] [CrossRef]
- Zhang, X. Middle Tillage Fertilization Machinery. In Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2017; Volume 1, p. 565. [Google Scholar]
- Wang, W. Deep Rotary Tillage and Mixing Process for Soil-Straw Based on Biaxial Cutting Principle under Rice-Wheat Rotation System; Yangzhou University: Yangzhou, China, 2023. [Google Scholar]
- Pan, H. Design and Parameter Optimization of Double Axis Rotary Tillage Stubble Extinguisher Based on Discrete Element Method; Jiangsu University: Zhenjiang, China, 2020. [Google Scholar]
- Shi, Y.; Xi, X.; Wu, F.; Zhang, R.; Jin, Y.; Gong, J. Design and experimental study on automatic driving system of motor type agricultural machinery based on Beidou navigation. J. Northeast Agric. Univ. 2019, 4, 88–96. [Google Scholar]
- Jiao, J.; Hu, L.; Chen, G.; Chen, C.; Zang, Y. Development and Experimentation of Intra-Row Weeding Device for Organic Rice. Agriculture 2024, 14, 146. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Technical Parameters |
|---|---|
| Supporting power | 51.5 kW |
| The number of weeding lines | 4 rows for soybeans/2 rows for corn |
| Working speed | 2–4 km·h−1 |
| Machine width | 1900 mm |
| Overall weeding depth | 20–50 mm |
| Height of frame above ground | 720 mm |
| Navigation accuracy for row operations | ±2.5 mm |
| Working performance | 3.2–4.8 hm2·h−1 |
| Parameter | Values |
|---|---|
| Density of soil | 1.5966 g·cm⁻3 |
| Density of steel | 7860 kg·m⁻3 |
| Poisson’s ratio of soil | 0.288 |
| Poisson’s ratio of steel | 0.3 |
| Shear modulus of the soil | 1 × 106 |
| Shear modulus of the steel material | 7.86 × 104 |
| Coefficient of static friction of the soil–soil | 0.33 |
| Coefficient of rolling friction of the soil–soil | 0.14 |
| Coefficient of static friction of the soil–steel | 0.107 |
| Coefficient of rolling friction of the soil–steel | 0.313 |
| Restitution coefficient of soil–steel | 0.6 |
| Cohesion of the soil–soil | 7.8 |
| Cohesion of the soil–steel | 6 |
| Group | Specific Operation Parameters | |
|---|---|---|
| 1 | Mechanical weeding at 3.5 km/h, with a working depth of 3 cm | The PTO shaft rotational speed is 540 r/min |
| 2 | Mechanical weeding at 3.5 km/h, with a working depth of 4 cm | |
| 3 | Mechanical weeding at 3.5 km/h, with a working depth of 5 cm | |
| 4 | Mechanical weeding at 3.5 km/h, with a working depth of 3 cm | The PTO shaft rotational speed is 760 r/min |
| 5 | Mechanical weeding at 3.5 km/h, with a working depth of 4 cm | |
| 6 | Mechanical weeding at 3.5 km/h, with a working depth of 5 cm | |
| The PTO Rotational Speed Is 540 r/min The Implement Forward Speed Is 3 km/h | Blade-Toothed Design | Comb-Toothed Design |
|---|---|---|
| Count of Disturbed Particles | 291,392 | 207,769 |
| Maximum resistance | 1.090 N | 0.89 N |
| Average Resistance | 0.25 N | 0.17 N |
| Machine Forward Speed | Number of Disturbed Particles at the PTO Rotational Speed of 540 r/min | Number of Disturbed Particles at the PTO Rotational Speed of 760 r/min |
|---|---|---|
| 2.5 km/h | 232,736 | 304,237 |
| 3 km/h | 291,392 | 397,074 |
| 3.5 km/h | 382,756 | 474,076 |
| 4 km/h | 369,426 | 414,022 |
| Machine Forward Speed | PTO Rotation Speed of 540 r/min | PTO Rotation Speed of 760 r/min | ||
|---|---|---|---|---|
| Maximum Resistance | Average Resistance | Maximum Resistance | Average Resistance | |
| 2.5 km/h | 1.076 N | 0.27 N | 1.179 N | 0.40 N |
| 3 km/h | 1.090 N | 0.25 N | 1.560 N | 0.42 N |
| 3.5 km/h | 1.084 N | 0.30 N | 1.340 N | 0.37 N |
| 4 km/h | 1.196 N | 0.32 N | 1.397 N | 0.41 N |
| PTO Shaft Rotational Speed | Inter-Row Weeding Rate | Corn Seedling Injury Rate | Corn Seedling Injury Rate |
|---|---|---|---|
| Average value at 540 r/min | 84.0% | 2.9% | 3.6% |
| Average value at 760 r/min | 90.4% | 3.4% | 4.2% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Z.; Xi, X.; Zhang, B.; Shi, Y.; Wang, Y.; Zhang, R. Design and Experiment of an Inter-Row Weeding Machine Applied in Soybean and Corn Strip Compound Planting (SCSCP). Agronomy 2024, 14, 2136. https://doi.org/10.3390/agronomy14092136
Tang Z, Xi X, Zhang B, Shi Y, Wang Y, Zhang R. Design and Experiment of an Inter-Row Weeding Machine Applied in Soybean and Corn Strip Compound Planting (SCSCP). Agronomy. 2024; 14(9):2136. https://doi.org/10.3390/agronomy14092136
Chicago/Turabian StyleTang, Zihao, Xiaobo Xi, Baofeng Zhang, Yangjie Shi, Yajuan Wang, and Ruihong Zhang. 2024. "Design and Experiment of an Inter-Row Weeding Machine Applied in Soybean and Corn Strip Compound Planting (SCSCP)" Agronomy 14, no. 9: 2136. https://doi.org/10.3390/agronomy14092136
APA StyleTang, Z., Xi, X., Zhang, B., Shi, Y., Wang, Y., & Zhang, R. (2024). Design and Experiment of an Inter-Row Weeding Machine Applied in Soybean and Corn Strip Compound Planting (SCSCP). Agronomy, 14(9), 2136. https://doi.org/10.3390/agronomy14092136