

Optimization of Clamping and Conveying Parameters for Spinach Orderly Harvesting with Low Damage by Simulation and Experiment
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Material
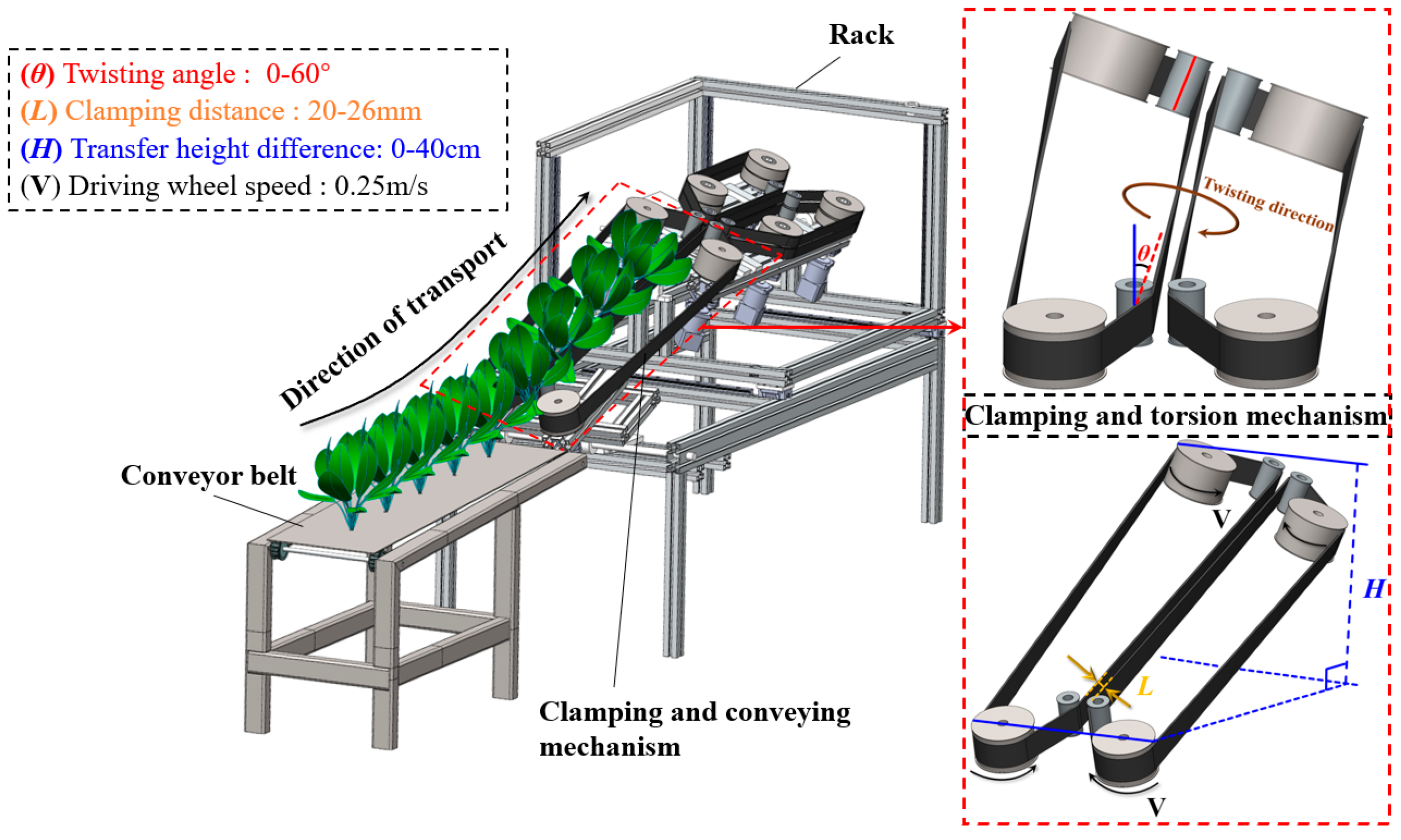
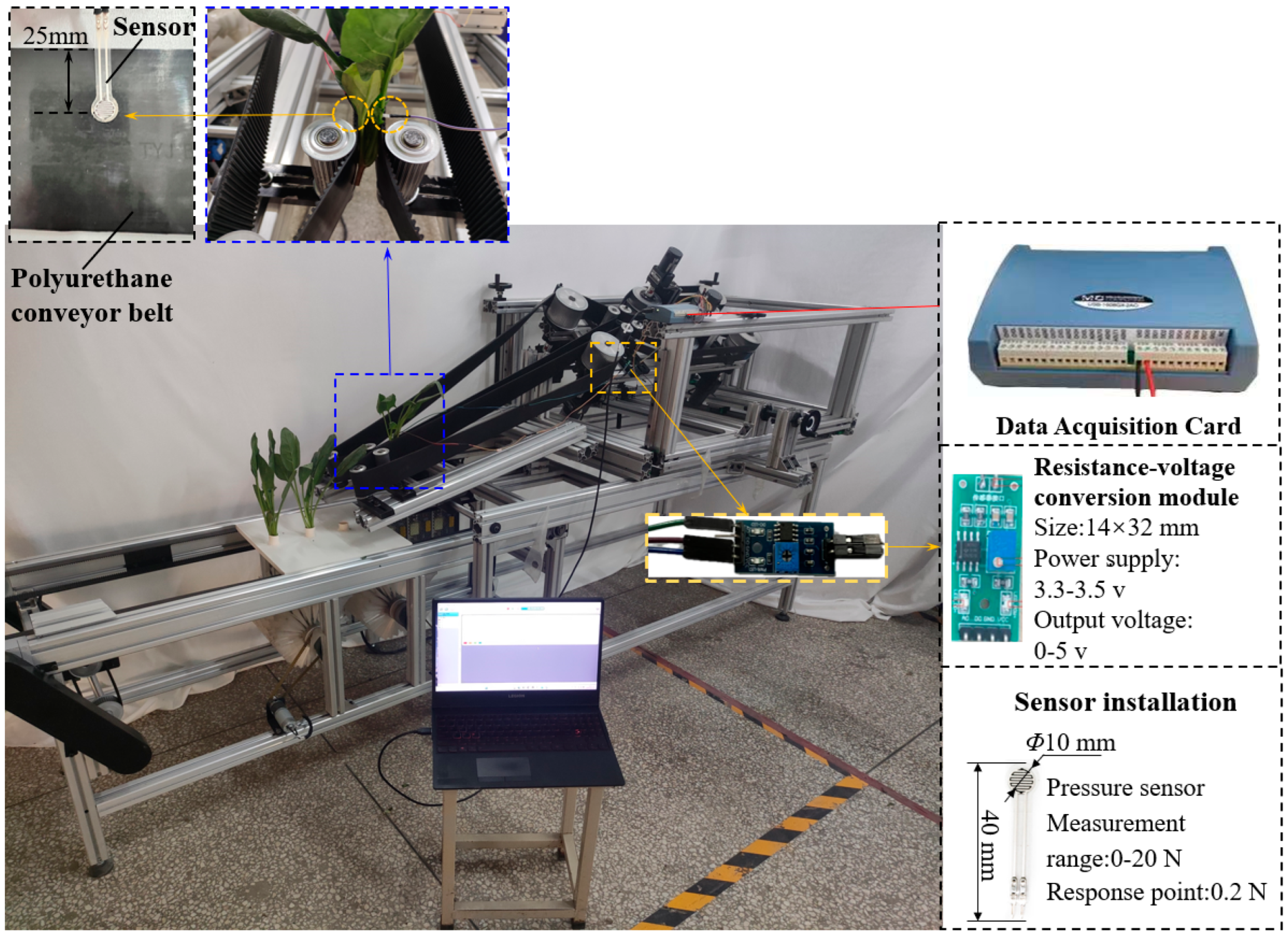
2.2. Design and Structure of Test Platform
2.3. Experimental Methods
2.3.1. Measurement of Spinach Compression Damage
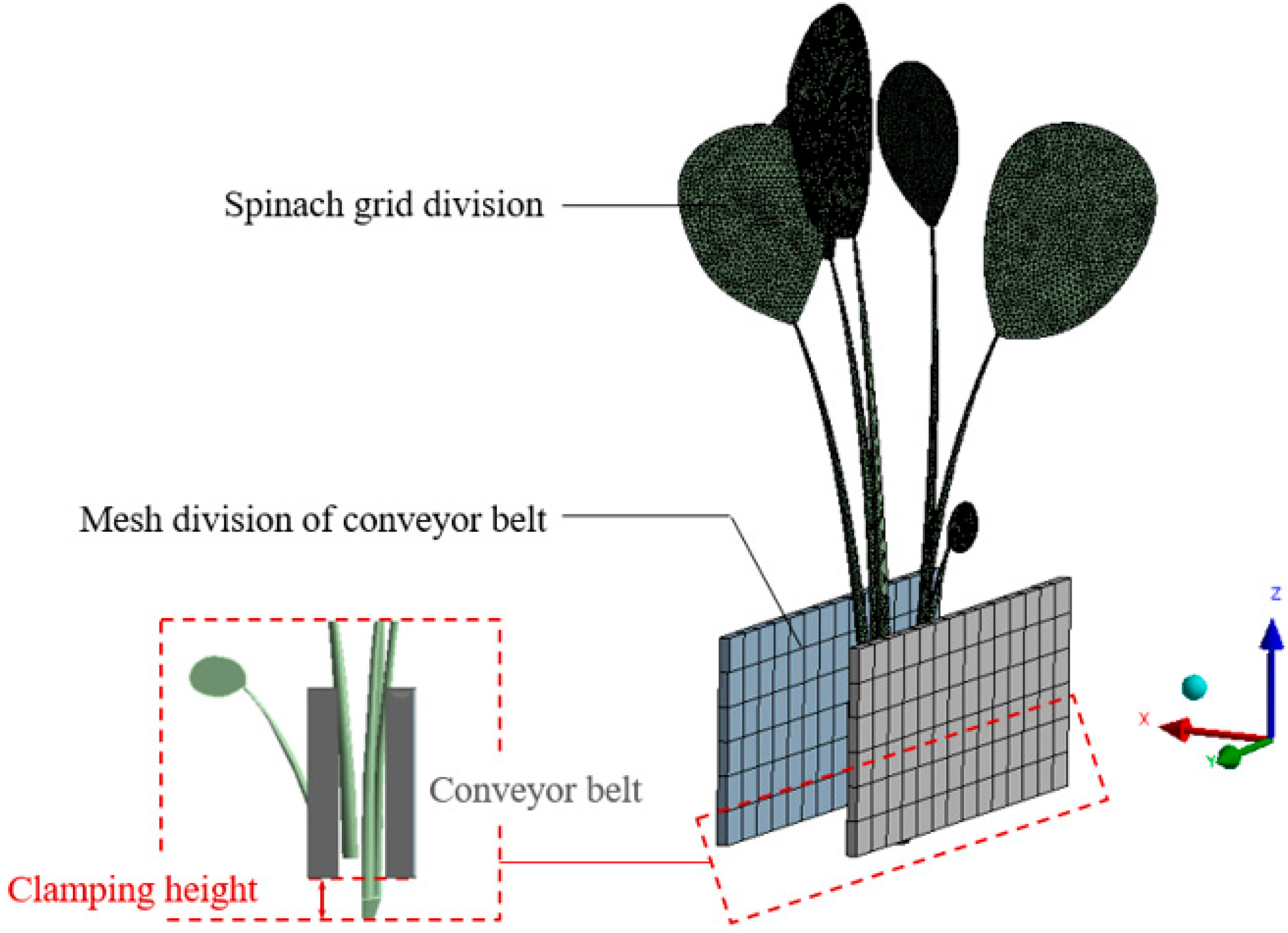
2.3.2. Finite Element Model for Spinach Clamping Simulation
2.3.3. Box–Behnken Experimental Method
2.3.4. Validation Test Method
3. Results and Discussion
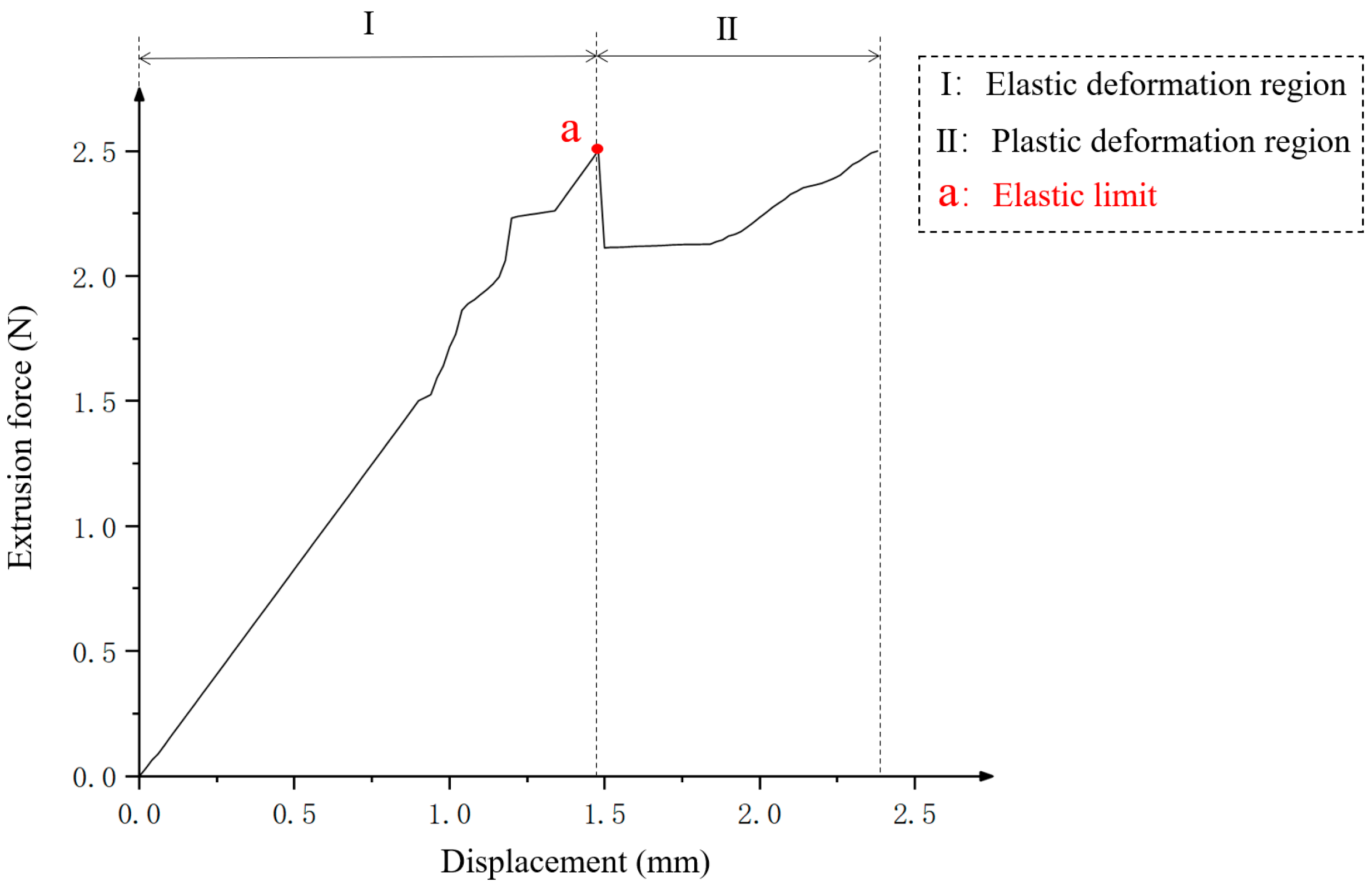
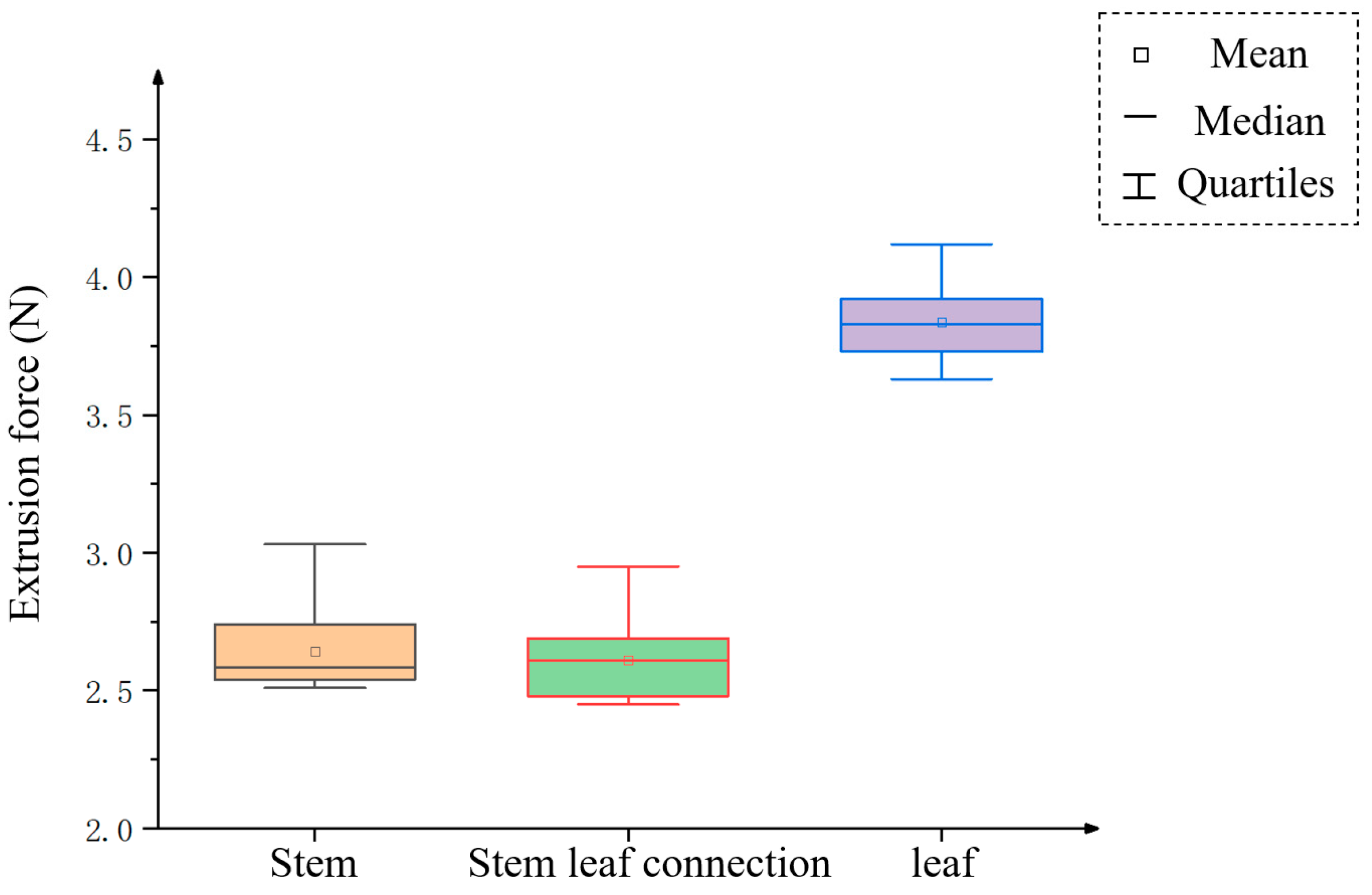
3.1. Mechanical Characteristics of Spinach Extrusion Injury
3.2. Finite Element Simulation Results of Spinach Clamping Height
3.3. Box–Behnken Experimental Results and Discussion
3.3.1. Experimental Results
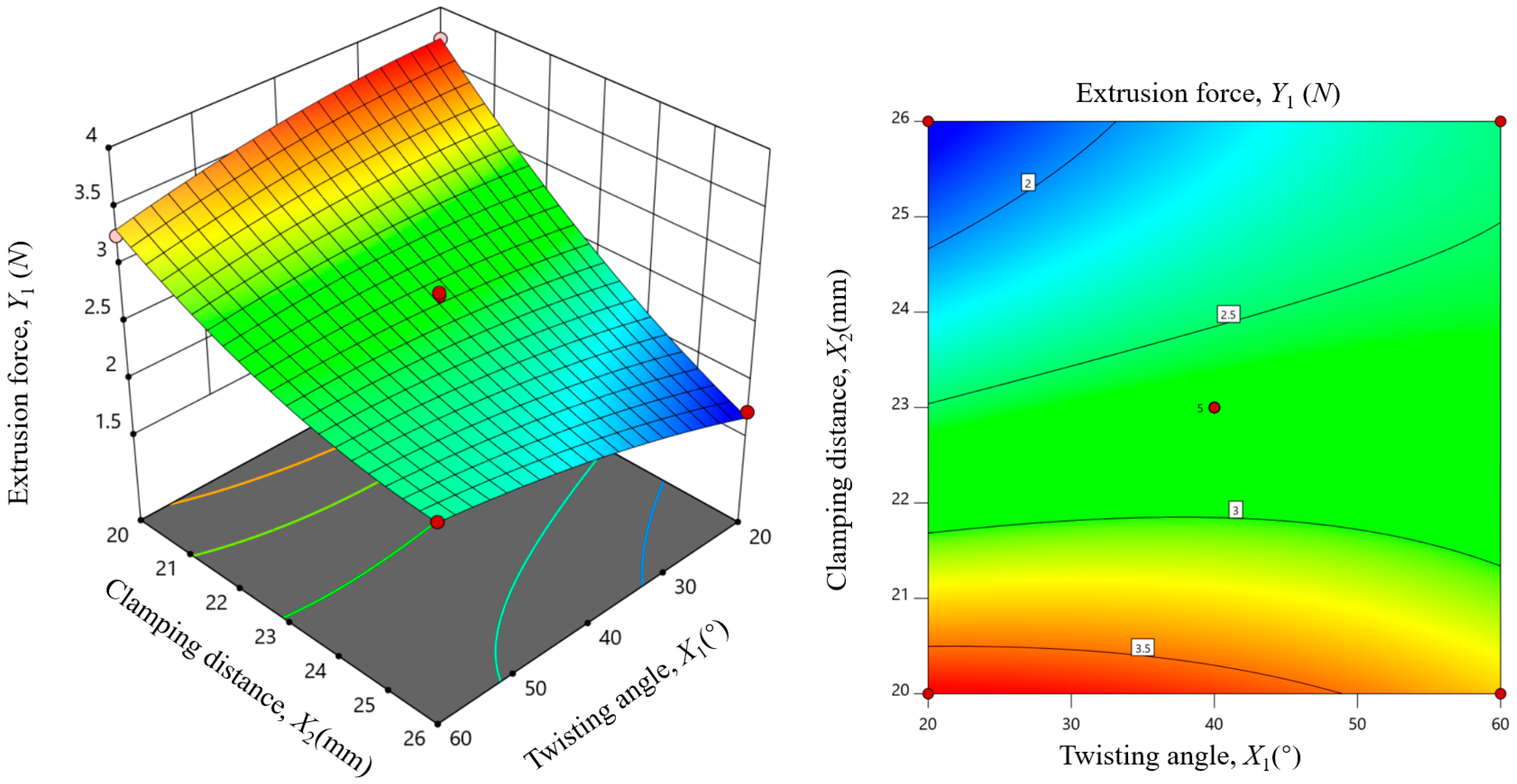
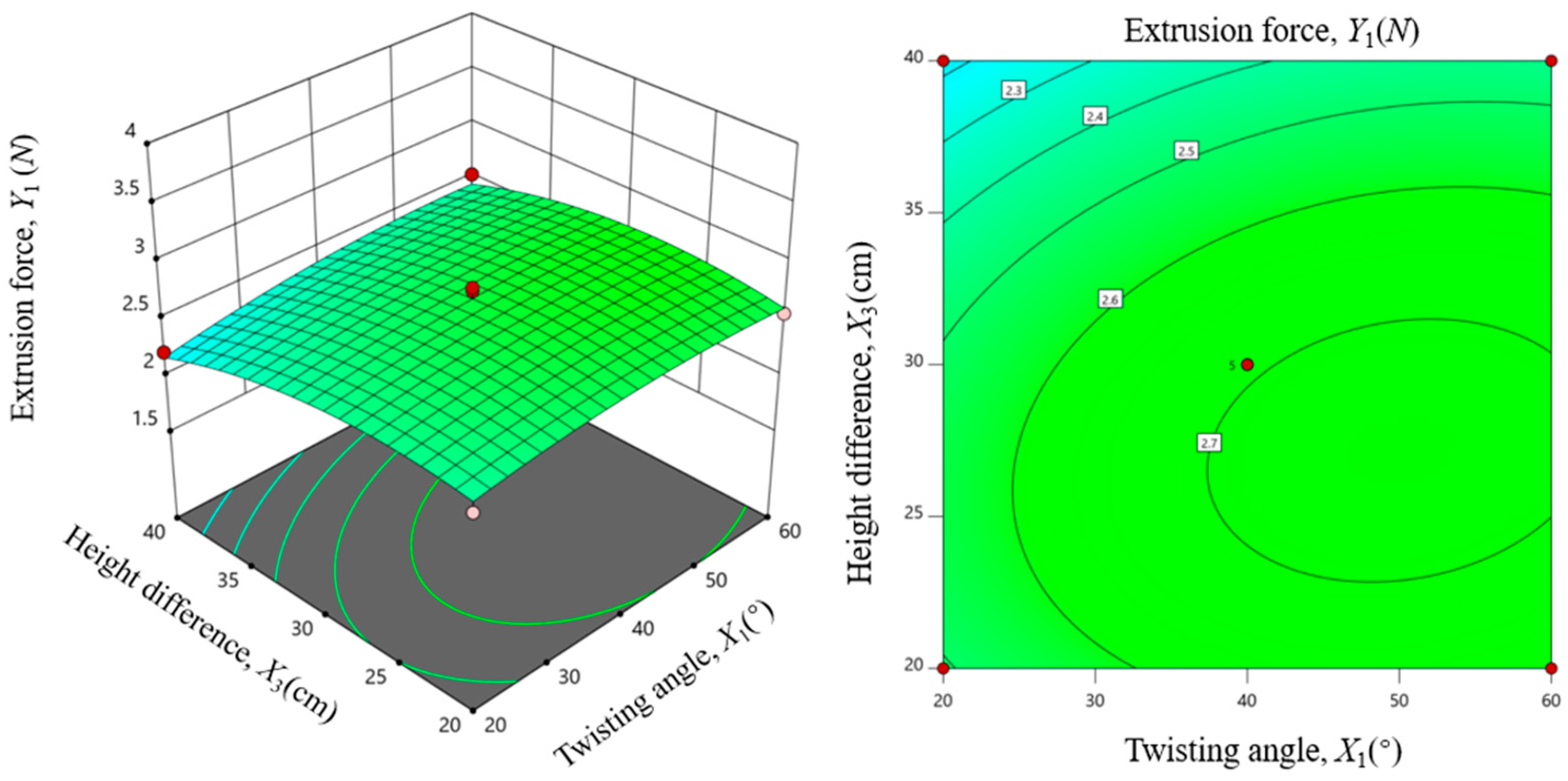
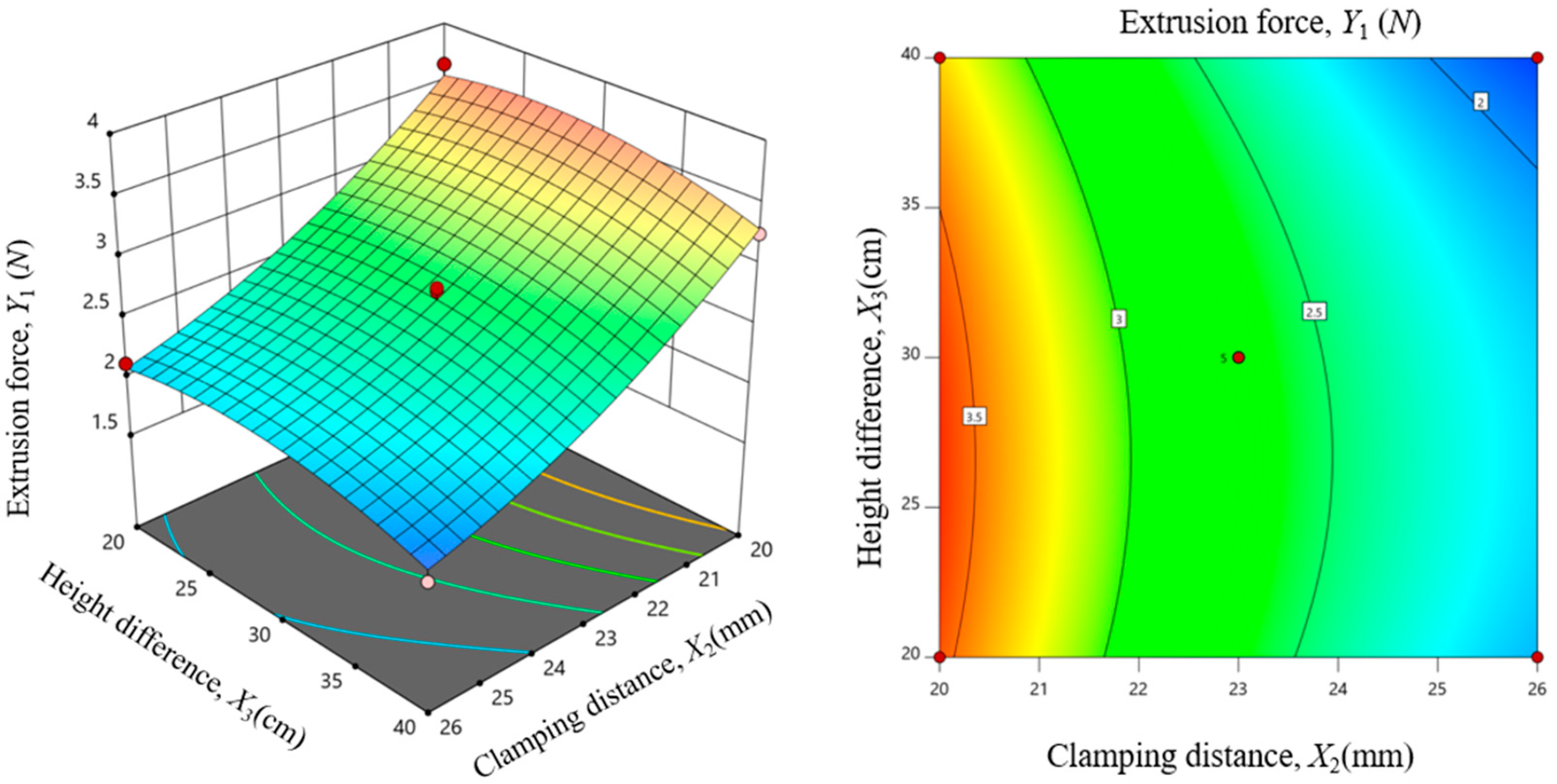
3.3.2. Two-Factor Interaction Response Surface Analysis
3.4. Optimal Factor Combination
3.5. Experimental Validation
4. Conclusions
- (1)
- The average damage force values for the spinach stems, the connections of stems, and the leaves were 2.64 N, 2.51 N, and 3.84 N, respectively. The damage stress for the spinach stems was 8.04 × 10−2 MPa, the extrusion damage stress at the connections of stems and leaves was 7.85 × 10−2 MPa, and the extrusion damage stress for the spinach leaves was 11.63 × 10−2 MPa. The damage force value for the entire spinach plant was determined to be the minimum value among the three measured parts (7.85 × 10−2 MPa);
- (2)
- The finite element model for spinach and the clamping conveyor device was established. The spinach clamping height for orderly harvesting was determined by finite element simulation, and the solved clamping height was 20 mm. The maximum stress on the spinach under the extrusion force was 6.23 × 10−2 MPa, which was less than the damage stress of spinach;
- (3)
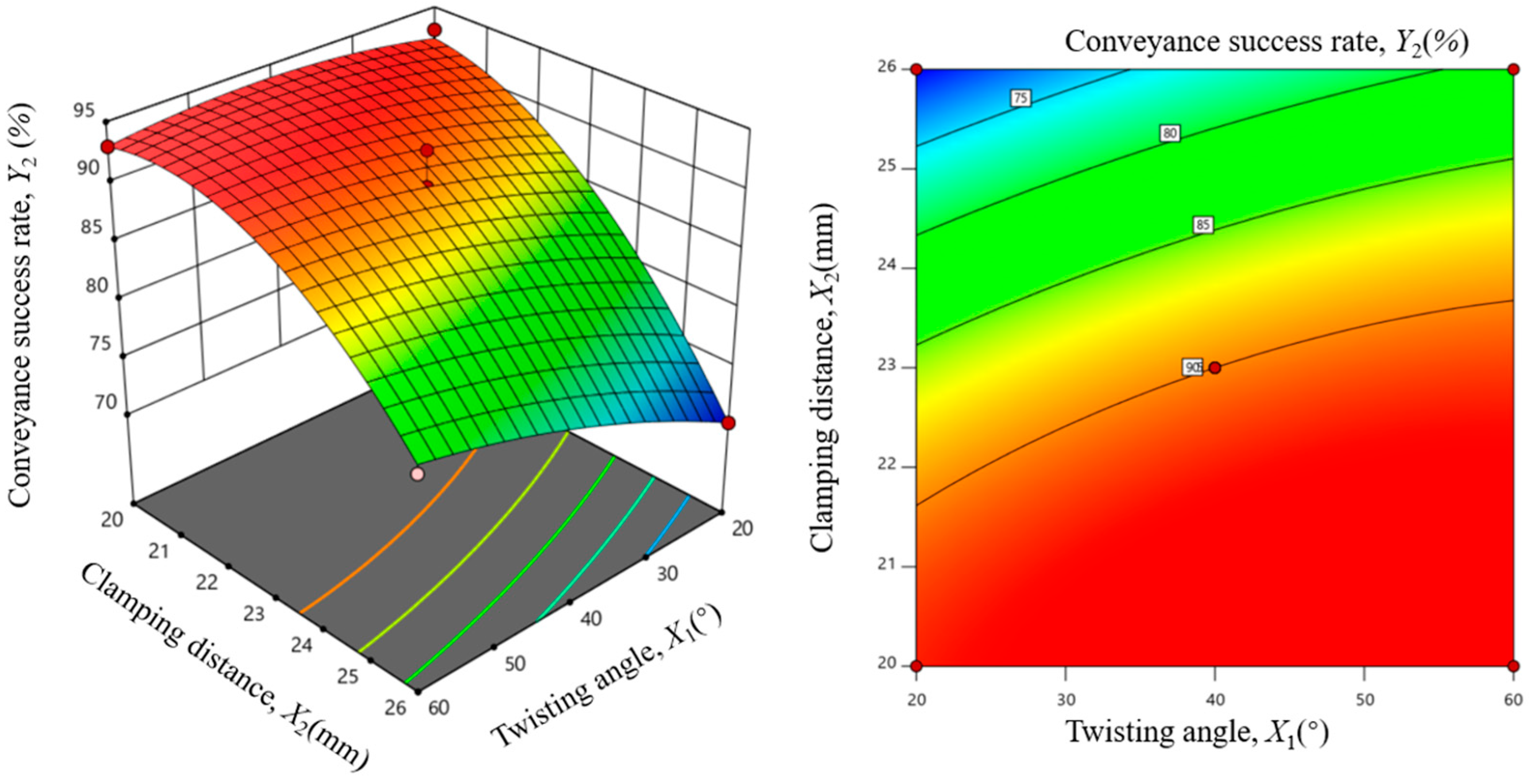
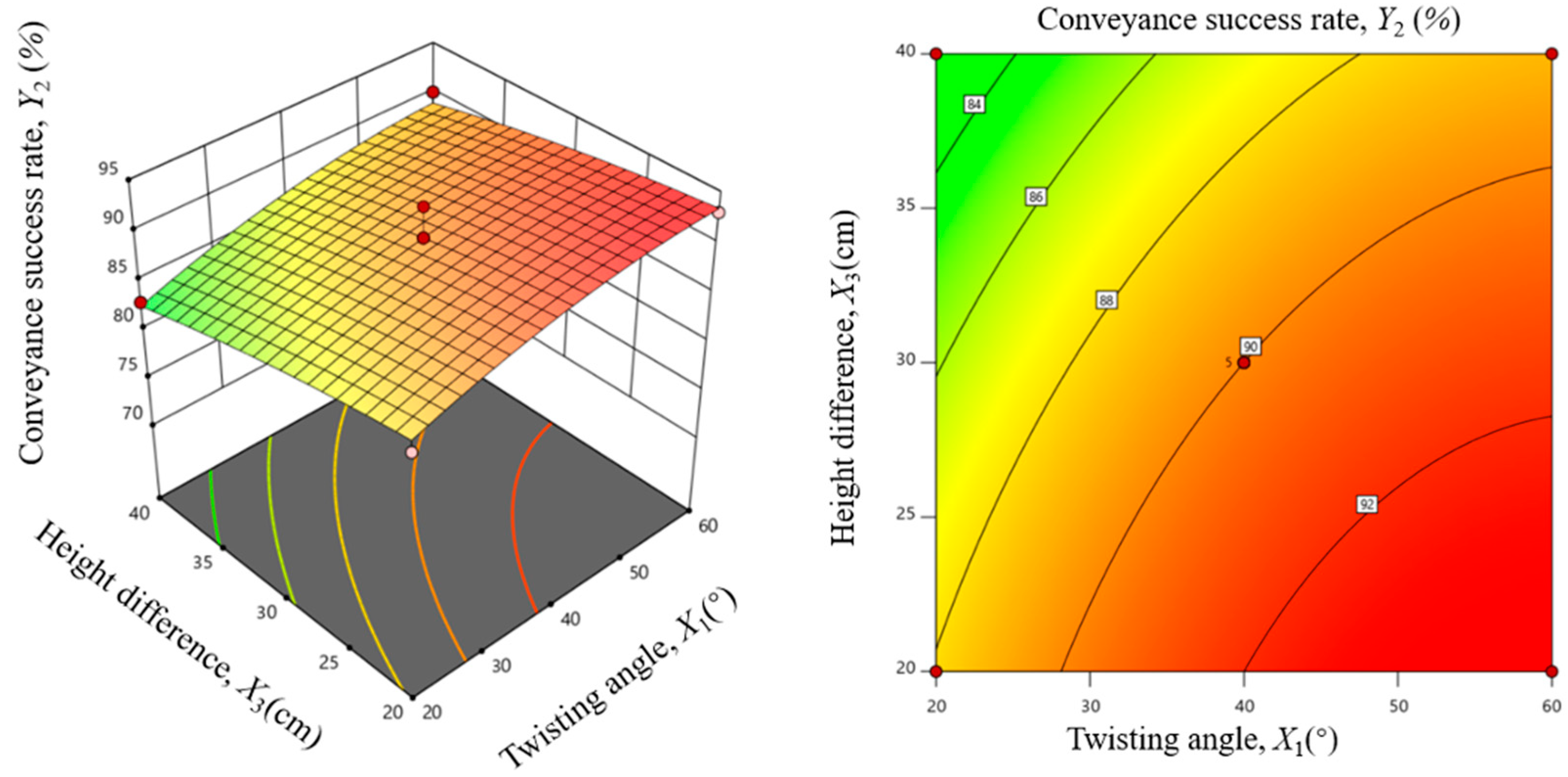
- The Box–Behnken experimental results indicated that the order of significance of various factors was the clamping distance, the height difference, and the twisting angle. The significance order of the impact on the conveyance success rate was the clamping distance, the twisting angle, and the height difference. The optimal parameter combination was a twisting angle of 60°, clamping distance of 24 mm, and height difference of 20 cm;
- (4)
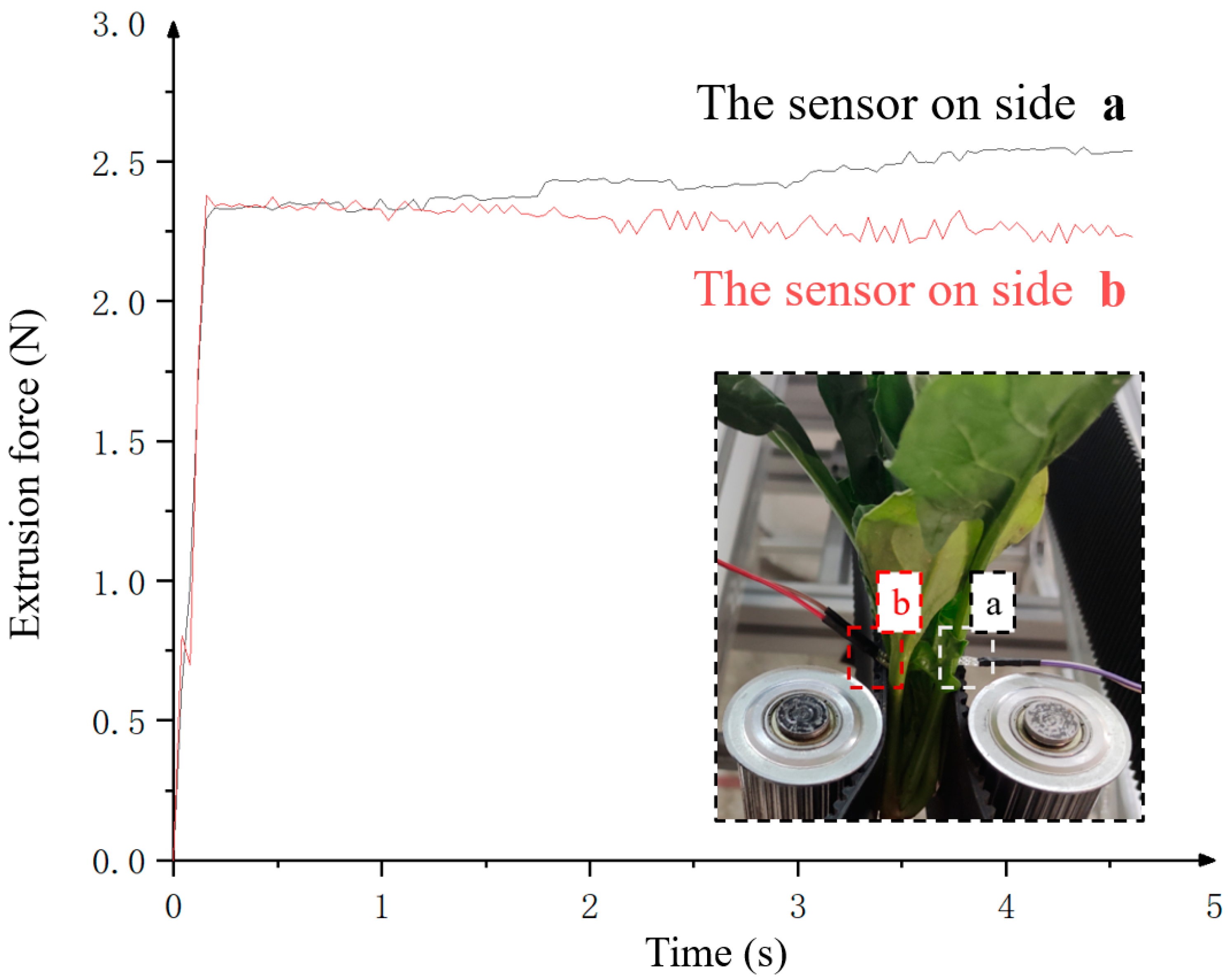
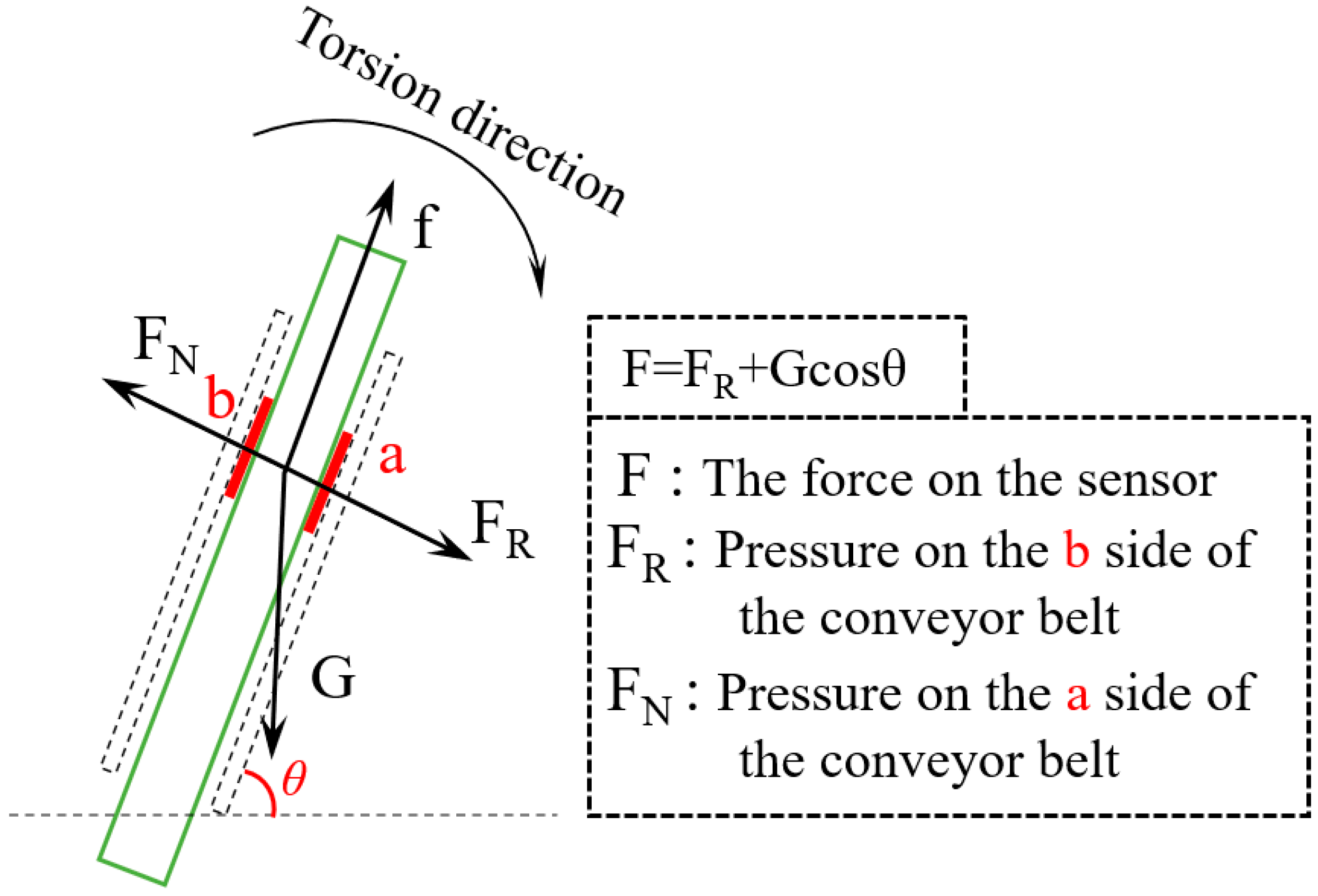
- Under the conditions of a clamping height of 20 mm, twisting angle of 60°, clamping distance of 24 mm, and height difference of 20 cm, a validation test was conducted. The average extrusion force of the test results was 2.37 N, with a conveying success rate of 94% and a conveying damage rate of 3%, achieving the orderly and low-damage harvesting of spinach.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Motai, A.; Yamazaki, M.; Muramatsu, N.; Watanabe, M.; Izuta, T. Submicron ammonium sulfate particles deposited on leaf surfaces of a leafy vegetable (Komatsuna, Brassica rapa L. var. perviridis) are taken up by leaf and enhance nocturnal leaf conductance. Atmos. Environ. 2018, 187, 155–162. [Google Scholar]
- D’Imperio, M.; Renna, M.; Cardinali, A.; Buttaro, D.; Serio, F.; Santamaria, P. Calcium biofortification and bioaccessibility in soilless “baby leaf” vegetable production. Food Chem. 2016, 213, 149–156. [Google Scholar] [CrossRef] [PubMed]
- Taiwo, B.J.; Taiwo, G.O.; Olubiyi, O.O.; Fatokun, A.A. Polyphenolic compounds with anti-tumour potential from Corchorus olitorius (L.) Tiliaceae, a Nigerian leaf vegetable. Bioorganic Med. Chem. Lett. 2016, 26, 3404–3410. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Chen, J.; Guo, T.; Zhu, L.; Li, D. Spatial patterns and correlations of lead concentrations in soil, leaf vegetables and human hair in the Pearl River Delta region, South China. J. Geochem. Explor. 2017, 179, 1–8. [Google Scholar] [CrossRef]
- Jin, Y.; Wang, J.; Chen, J.; Song, Z.; Zhang, R.; Zhou, R. Design and Experiment for Flexible Clamping and Conveying Device for Green Leafy Vegetable Orderly Harvester. Agriculture 2024, 14, 967. [Google Scholar] [CrossRef]
- Bantis, F.; Kaponas, C.; Charalambous, C.; Koukounaras, A. Strategic successive harvesting of rocket and spinach baby leaves enhanced their quality and production efficiency. Agriculture 2021, 11, 465. [Google Scholar] [CrossRef]
- Singh, S.; Singh, M.K.; Ekka, U. Battery-assisted offset rotary cutter for leafy green spinach and coriander. RASSA J. Sci. Soc. 2020, 2, 187–192. [Google Scholar]
- Kumari, A.; Singh, S.; VP, A.; Joshi, P.; Chauhan, A.K.; Singh, M.; Hemalatha, S. Mechanization in Pre-harvest Technology to Improve Quality and Safety. In Engineering Aspects of Food Quality and Safety; Springer: Berlin/Heidelberg, Germany, 2023; pp. 93–114. [Google Scholar]
- McPhee, J.; Pedersen, H.H.; Mitchell, J.P. Mechanization of Vegetable. In Advances in Agricultural Machinery and Technologies; Chen, G., Ed.; Taylor & Francis Group; CRC Press: Boca Raton, FL, USA, 2018; Volume 49, ISBN 9781498754125. [Google Scholar]
- Zhang, J.; Wang, J.; Du, D.; Long, S.; Wang, Y.; Han, C.; Xu, Y. Optimization and validation of root-cutting device for Chinese cabbage harvester based on discrete element method. Comput. Electron. Agric. 2023, 214, 108314. [Google Scholar] [CrossRef]
- Gao, L.; Yuan, Y.; Yi, J.; Kong, D. Revised design and experiment on small leek harvester. Food Mach. 2016, 32, 117–119. [Google Scholar]
- Xiao, H.; Jin, Y.; Cao, G. Research on Mechanization Equipment Technology for Vegetable Production; China Agricultural Science and Technology Press: Beijing, China, 2019; pp. 18–20. [Google Scholar]
- Liangliang, Z.; Xuemei, L.; Jinguang, L.; Ziru, N.; Yeben, S.; Jin, Y. Clamping Conveyer Device of Ordered Spinach Harvester Based on Rheological Property Analysis. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2019, 50, 72–79. [Google Scholar]
- Yin, H.; Wang, Z. Research on the Design of Cutting Table Mechanism of Leafy Vegetable Harvester Based on Computer Technology. J. Phys. Conf. Ser. 2021, 1915, 022004. [Google Scholar] [CrossRef]
- Zheng, Q.; Xu, M.; Chu, K.; Pan, R.; Yu, A. A coupled FEM/DEM model for pipe conveyor systems: Analysis of the contact forces on belt. Powder Technol. 2017, 314, 480–489. [Google Scholar] [CrossRef]
- Zhang, M.-Y.; Zhu, H.-D.; Zhang, W. Finite element analysis of belt conveyor bracket. J. Phys. Conf. Ser. 2021, 1748, 062047. [Google Scholar] [CrossRef]
- Zhao, M.; Han, J.; Ma, S. Finite element analysis on driving drum of mining belt conveyor. In Proceedings of the 2018 11th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 8–9 December 2018; pp. 222–225. [Google Scholar]
- Velloso, N.S.; Costa, A.L.G.; Magalhães, R.R.; Santos, F.L.; de Andrade, E.T. The Finite Element Method Applied to Agricultural Engineering: A Review. Curr. Agric. Res. J. 2018, 6, 286. [Google Scholar] [CrossRef]
- Tong, J.; Zhang, Z.; Chen, D.; Zhang, Q.; Ma, Y. Three-dimensional dynamic finite element analysis of interaction between toothed wheel and soil. Trans. Chin. Soc. Agric. Eng. 2014, 30, 48–58. [Google Scholar]
- Wang, J.W.; Xu, C.S.; Xu, Y.N.; Wang, J.F.; Zhou, W.Q.; Wang, Q.; Tang, H. Resonance analysis and vibration reduction optimization of agricultural machinery frame-Taking vegetable precision seeder as an example. Processes 2021, 9, 1979. [Google Scholar] [CrossRef]
- Wu, K.; Lou, J.; Li, C.; Luo, W.; Li, C.; Li, J. Study on the Mechanism of Rootstock Damage during Clamping in Watermelon Grafting. Horticulturae 2022, 8, 617. [Google Scholar] [CrossRef]
- Xiong, D.; Wu, M.; Xie, W.; Luo, H. Design and experimental study of the key components of a rape (Brassica campestris) shoots (Changxiangtai 603) flexible clamping harvester. Agriculture 2023, 13, 792. [Google Scholar] [CrossRef]
- Tang, X.; Mo, C.Y.; Chan, D.E.; Peng, Y.; Qin, J.; Yang, C.-C.; Kim, M.S.; Chao, K. Physical and mechanical properties of spinach for whole-surface online imaging inspection. In Proceedings of the Sensing for Agriculture and Food Quality and Safety III, Orlando, FL, USA, 2 June 2011; pp. 237–245. [Google Scholar]
- Abhiram, A.; Briyangari, A.; Esewaran, R. Drying of gymnema sylvestre using far-infrared radiation: Antioxidant activity and optimization of drying conditions. AgriEngineering 2023, 5, 611–622. [Google Scholar] [CrossRef]
- Ma, Y.; Hu, P.; Jin, X.; Li, X.; Zhang, C.; Zhang, Y. Design and Experiment of Low Damage Flexible HarvestingDevice for Hydroponic Lettuce. Trans. Chin. Soc. Agric. Mach. 2022, 53, 175–183+210. [Google Scholar]
- Zhang, B.; Tang, Z.; Wang, M.; Li, Y. Breaking Behaviour of Wheat Stem Undergoing Multiple Forces Combination Sequence during Threshing Process. J. Agric. Sci. Technol. 2022, 24, 351–363. [Google Scholar]
- Oguchi, R.; Onoda, Y.; Terashima, I.; Tholen, D. Leaf anatomy and function. Leaf A Platf. Perform. Photosynth. 2018, 44, 97–139. [Google Scholar]
- Chen, W.M.; Wang, G.P.; Hu, L.L.; Yuan, J.N.; Wu, W.; Bao, G.C.; Yin, Z.C. Research on the control strategy of leafy vegetable harvester travel speed automatic control system. AgiEngineering 2022, 4, 801–825. [Google Scholar] [CrossRef]
- Du, X.; Liu, C. Design and testing of the filling-plate of inner-filling positive pressure high-speed seed-metering device for maize. Biosyst. Eng. 2023, 228, 1–17. [Google Scholar] [CrossRef]
- Song, Y.B.; Zou, L.L.; Liu, X.M.; Yuan, J.; Wang, K.; Wang, Y.; Strandhagen, J.; Yu, T. Design and experimental study of the spinach continuous harvester. Adv. Manuf. Autom. VIII 2019, 484, 559–566. [Google Scholar]
- Xia, H.M.; Li, L.Q.; Deng, C.H.; Zhu, S.C.; Chen, J.Q.; Yang, T.; Huang, R.X.; Zhen, W.B. Finite element simulation parameter calibration and verification for stem cutting of hydroponic Chinese kale. Agriculture 2024, 14, 422. [Google Scholar] [CrossRef]
- Onur, O.; Ahmet, S.; Barış, E.; Fatih, D.; Satı, U.; Mehmet, Y.; Adnan, A. Using machine learning algorithms to investigate the impact of temperature treatment and salt stress on four forage peas (Pisum sativum var. arvense L.). Horticulturae 2024, 10, 656. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Factors | ||
|---|---|---|---|
| Twisting Angle X1 (°) | Clamping Distance X2 (mm) | Height Difference X3 (cm) | |
| −1 | 20 | 20 | 20 |
| 0 | 40 | 23 | 30 |
| 1 | 60 | 26 | 40 |
| Test Groups | Experimental Factors | Experiment Index | |||
|---|---|---|---|---|---|
| Twisting Angle, X1/° | Clamping Distance, X2/mm | Height Difference, X3/cm | Extrusion Force, Y1/N (Mean Value) | Conveyance Success Rate, Y2 (%) | |
| 1 | 40 | 20 | 20 | 3.65 | 93 |
| 2 | 20 | 20 | 30 | 3.72 | 93 |
| 3 | 60 | 26 | 30 | 2.46 | 80 |
| 4 | 20 | 26 | 30 | 1.72 | 70 |
| 5 | 40 | 23 | 30 | 2.55 | 90 |
| 6 | 40 | 23 | 30 | 2.79 | 87 |
| 7 | 60 | 20 | 30 | 3.27 | 93 |
| 8 | 20 | 23 | 40 | 2.22 | 83 |
| 9 | 40 | 26 | 40 | 1.75 | 70 |
| 10 | 40 | 23 | 30 | 2.76 | 93 |
| 11 | 60 | 23 | 20 | 2.56 | 93 |
| 12 | 40 | 23 | 30 | 2.68 | 90 |
| 13 | 40 | 23 | 30 | 2.68 | 90 |
| 14 | 20 | 23 | 20 | 2.4 | 87 |
| 15 | 60 | 23 | 40 | 2.53 | 90 |
| 16 | 40 | 20 | 40 | 3.26 | 93 |
| 17 | 40 | 26 | 20 | 2.12 | 83 |
| Source | Extrusion Force | |||
|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F Value | p Value | |
| Model | 5.12 | 9 | 47.92 | <0.0001 ** |
| X1 | 0.0722 | 1 | 6.08 | 0.0431 * |
| X2 | 4.28 | 1 | 360.11 | <0.0001 ** |
| X3 | 0.1176 | 1 | 9.90 | 0.0162 * |
| X1X2 | 0.3540 | 1 | 29.80 | 0.0009 ** |
| X1X3 | 0.0056 | 1 | 0.4735 | 0.5135 |
| X2X3 | 0.0001 | 1 | 0.0084 | 0.9295 |
| X12 | 0.0294 | 1 | 2.47 | 0.1599 |
| X22 | 0.1426 | 1 | 12.00 | 0.0105 * |
| X32 | 0.1379 | 1 | 11.61 | 0.0113 * |
| Residual | 0.0832 | 7 | ||
| Lack of hit | 0.0485 | 3 | 1.86 | 0.2765 |
| Pure error | 0.0347 | 4 | ||
| Cor total | 5.21 | 16 | ||
| Source | Conveyance Success Rate | |||
|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F Value | p Value | |
| Model | 886.19 | 9 | 27.85 | 0.0001 ** |
| X1 | 66.13 | 1 | 18.70 | 0.0035 ** |
| X2 | 595.12 | 1 | 168.32 | <0.0001 ** |
| X3 | 50.00 | 1 | 14.14 | 0.0071 ** |
| X1X2 | 25.00 | 1 | 7.07 | 0.0325 * |
| X1X3 | 0.2500 | 1 | 0.0707 | 0.7980 |
| X2X3 | 42.25 | 1 | 11.95 | 0.0106 * |
| X12 | 6.58 | 1 | 1.86 | 0.2148 |
| X22 | 95.00 | 1 | 26.87 | 0.0013 ** |
| X32 | 1.05 | 1 | 0.2977 | 0.6023 |
| Residual | 24.75 | 7 | ||
| Lack of hit | 6.75 | 3 | 0.5000 | 0.7022 |
| Pure error | 18.00 | 4 | ||
| Cor total | 910.94 | 16 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Qi, C.; Luo, Q.; Chen, M.; Ma, Y.; Wang, X. Optimization of Clamping and Conveying Parameters for Spinach Orderly Harvesting with Low Damage by Simulation and Experiment. Agronomy 2024, 14, 2164. https://doi.org/10.3390/agronomy14092164
Wang H, Qi C, Luo Q, Chen M, Ma Y, Wang X. Optimization of Clamping and Conveying Parameters for Spinach Orderly Harvesting with Low Damage by Simulation and Experiment. Agronomy. 2024; 14(9):2164. https://doi.org/10.3390/agronomy14092164
Chicago/Turabian StyleWang, Huankun, Chong Qi, Qiaojun Luo, Minglin Chen, Yidong Ma, and Xianlong Wang. 2024. "Optimization of Clamping and Conveying Parameters for Spinach Orderly Harvesting with Low Damage by Simulation and Experiment" Agronomy 14, no. 9: 2164. https://doi.org/10.3390/agronomy14092164
APA StyleWang, H., Qi, C., Luo, Q., Chen, M., Ma, Y., & Wang, X. (2024). Optimization of Clamping and Conveying Parameters for Spinach Orderly Harvesting with Low Damage by Simulation and Experiment. Agronomy, 14(9), 2164. https://doi.org/10.3390/agronomy14092164