Segmentation of Rice Seedlings Using the YCrCb Color Space and an Improved Otsu Method



Abstract
:1. Introduction
2. Materials and Methods
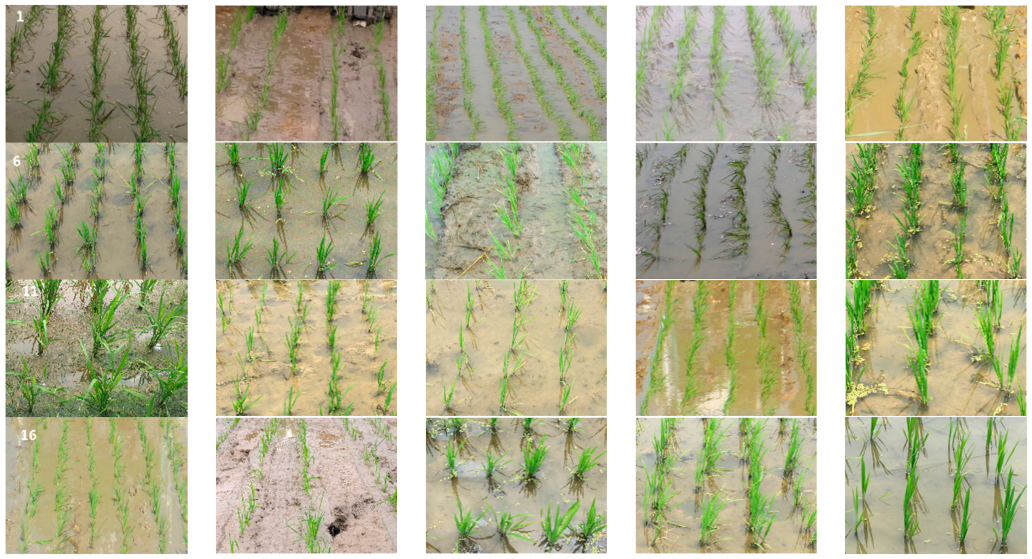
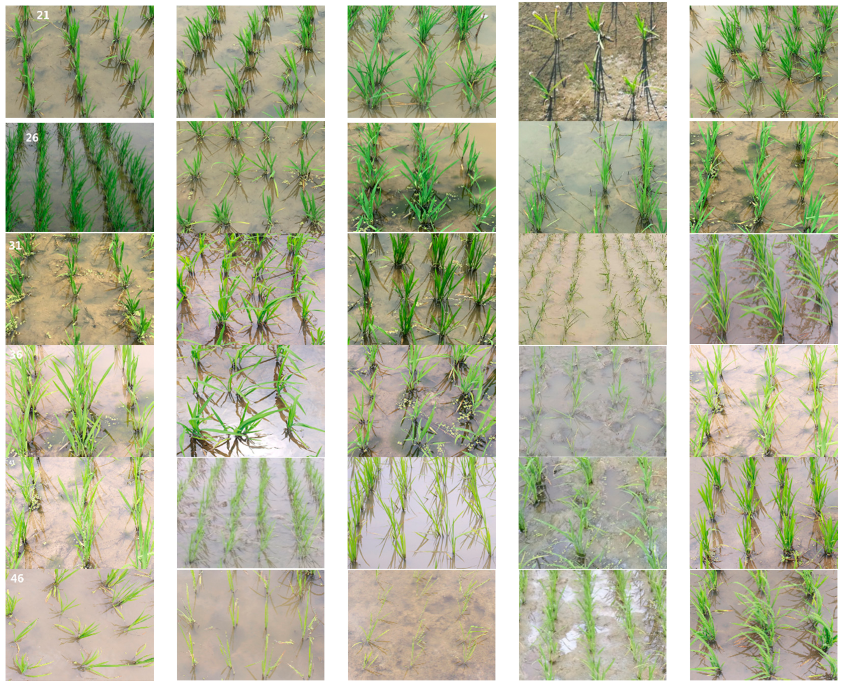
2.1. Experimental Fields and Rice Cultivars
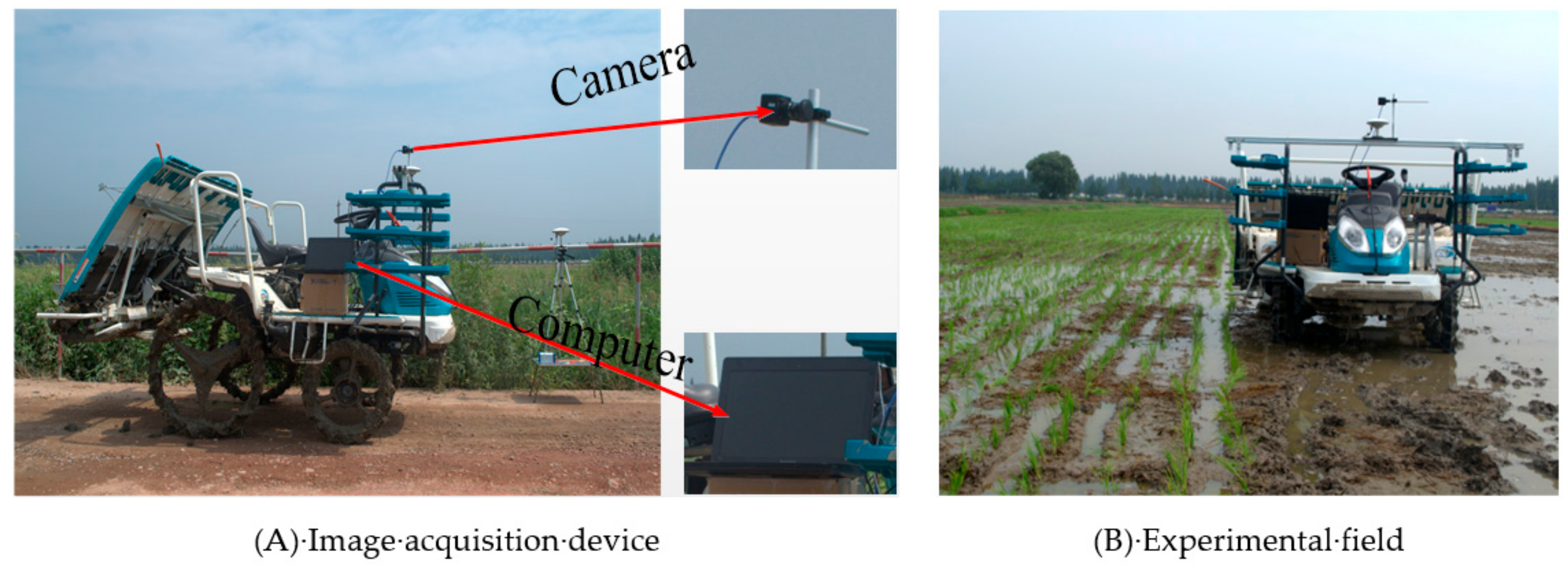
2.2. Image Acquistion
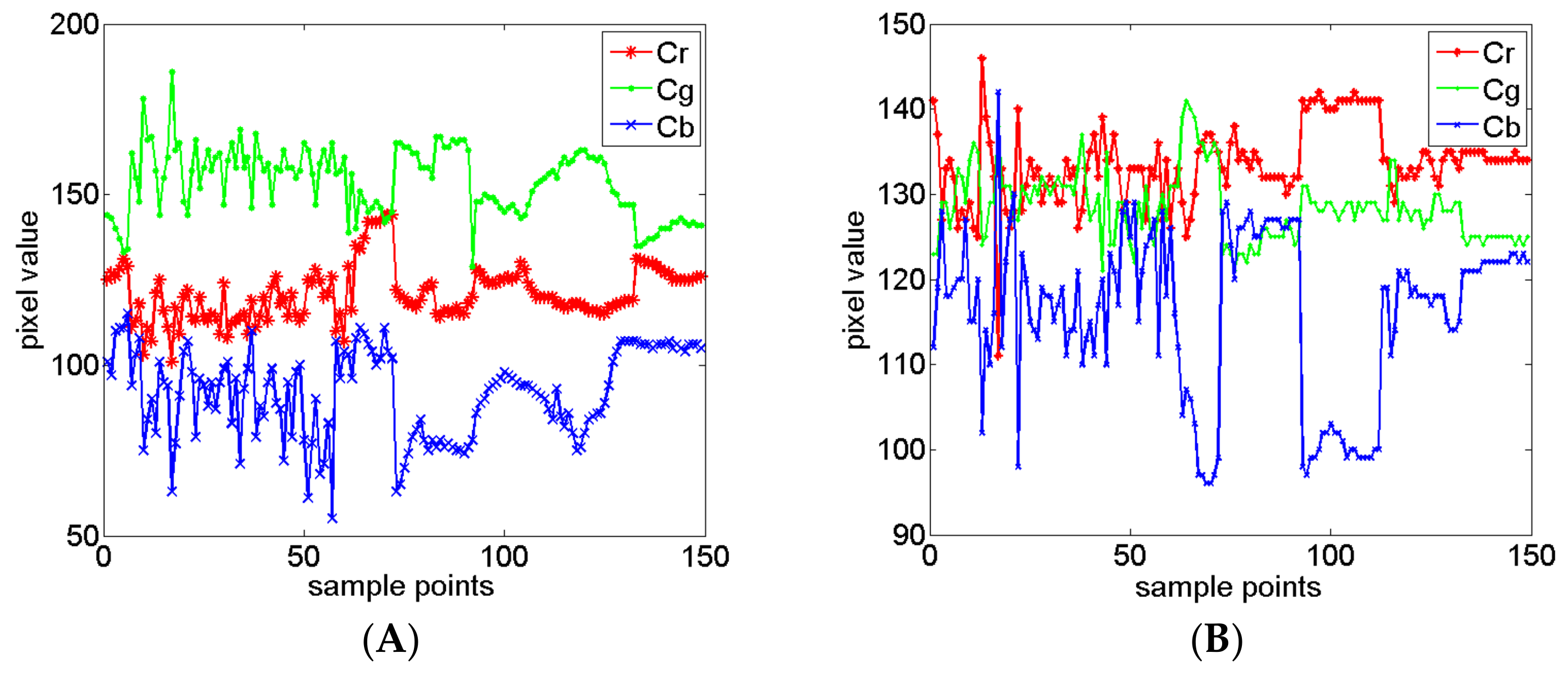
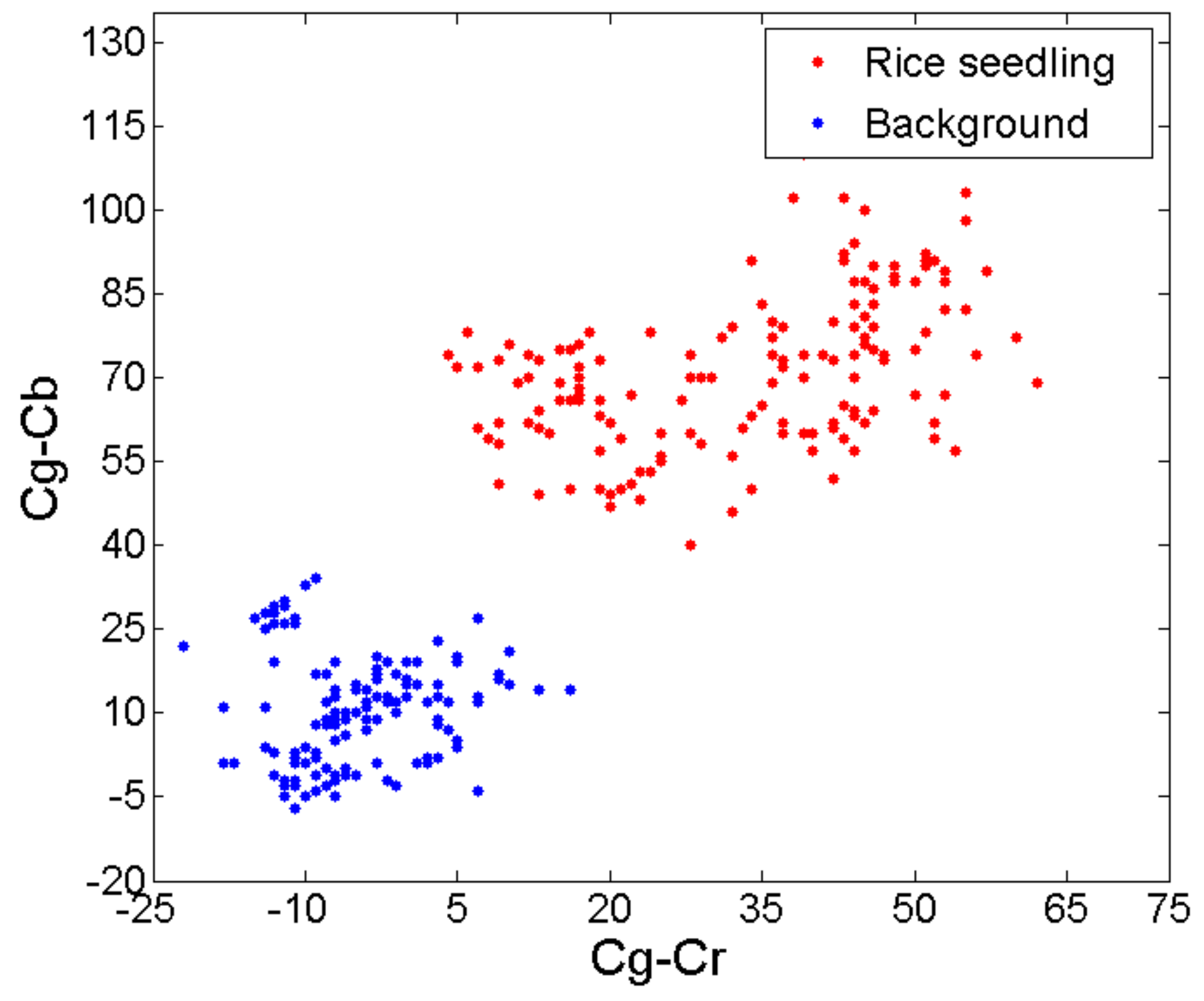
2.3. Color Space Analysis
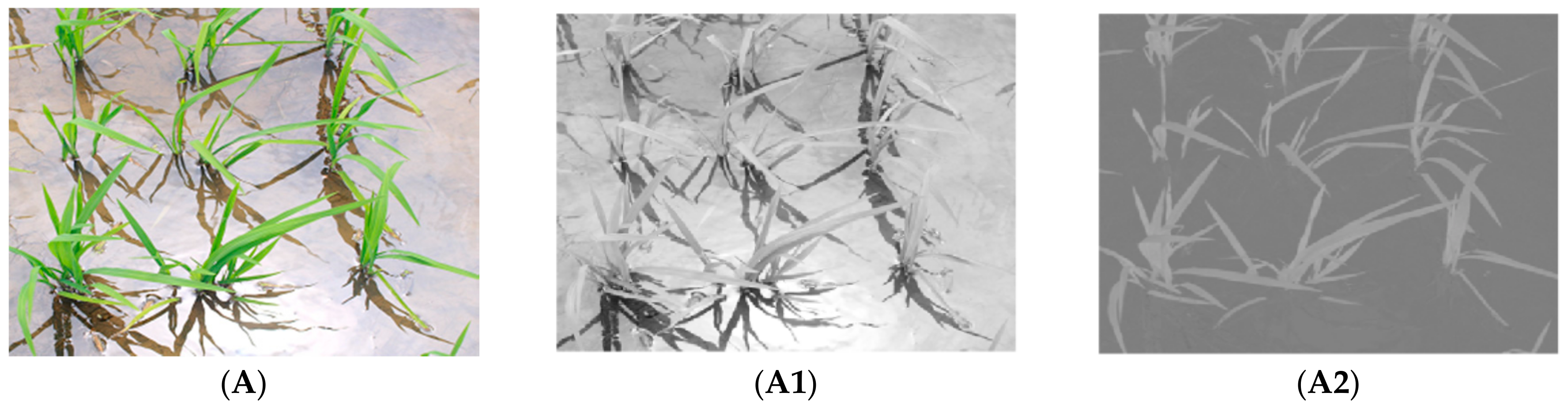
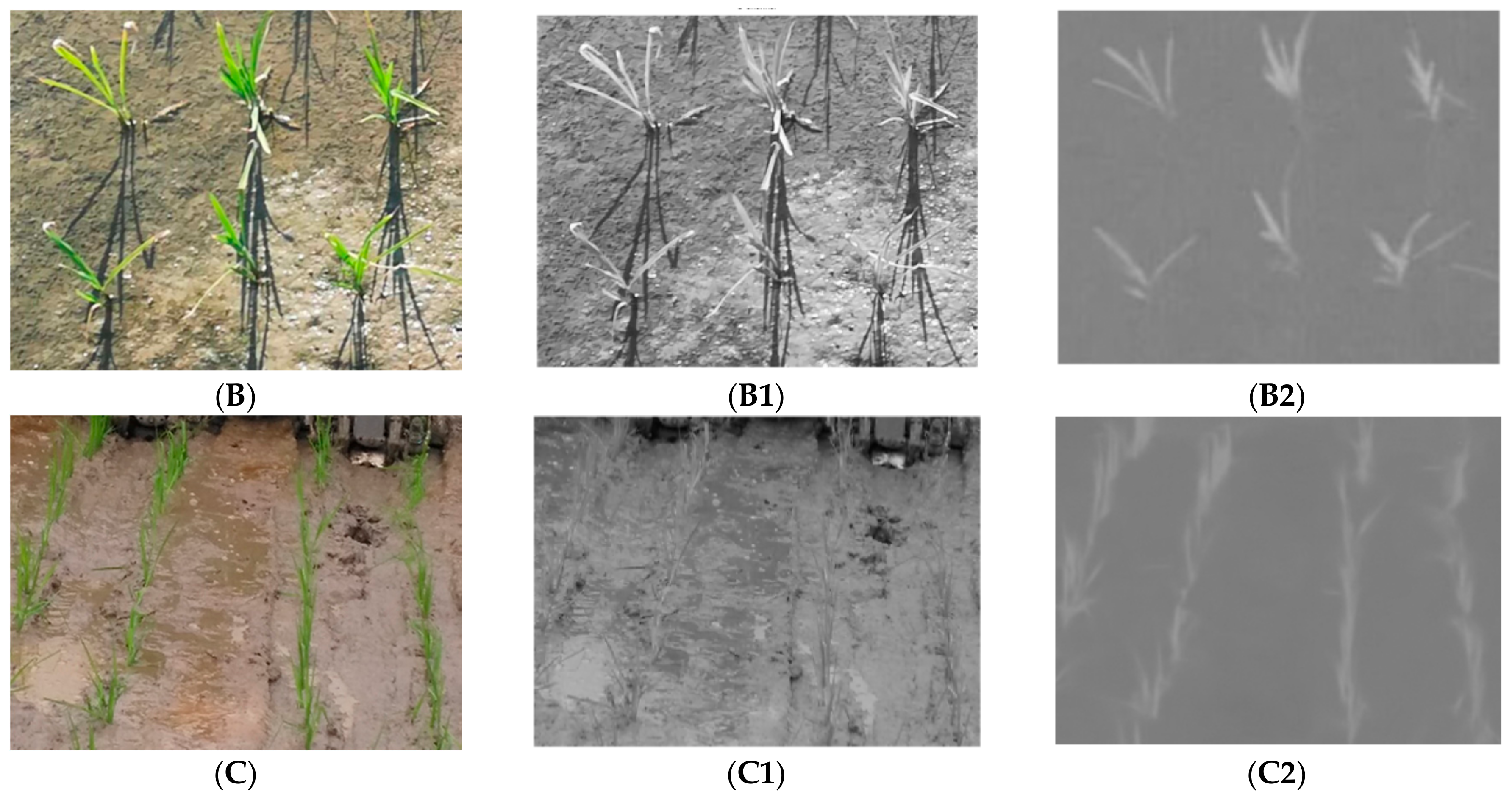
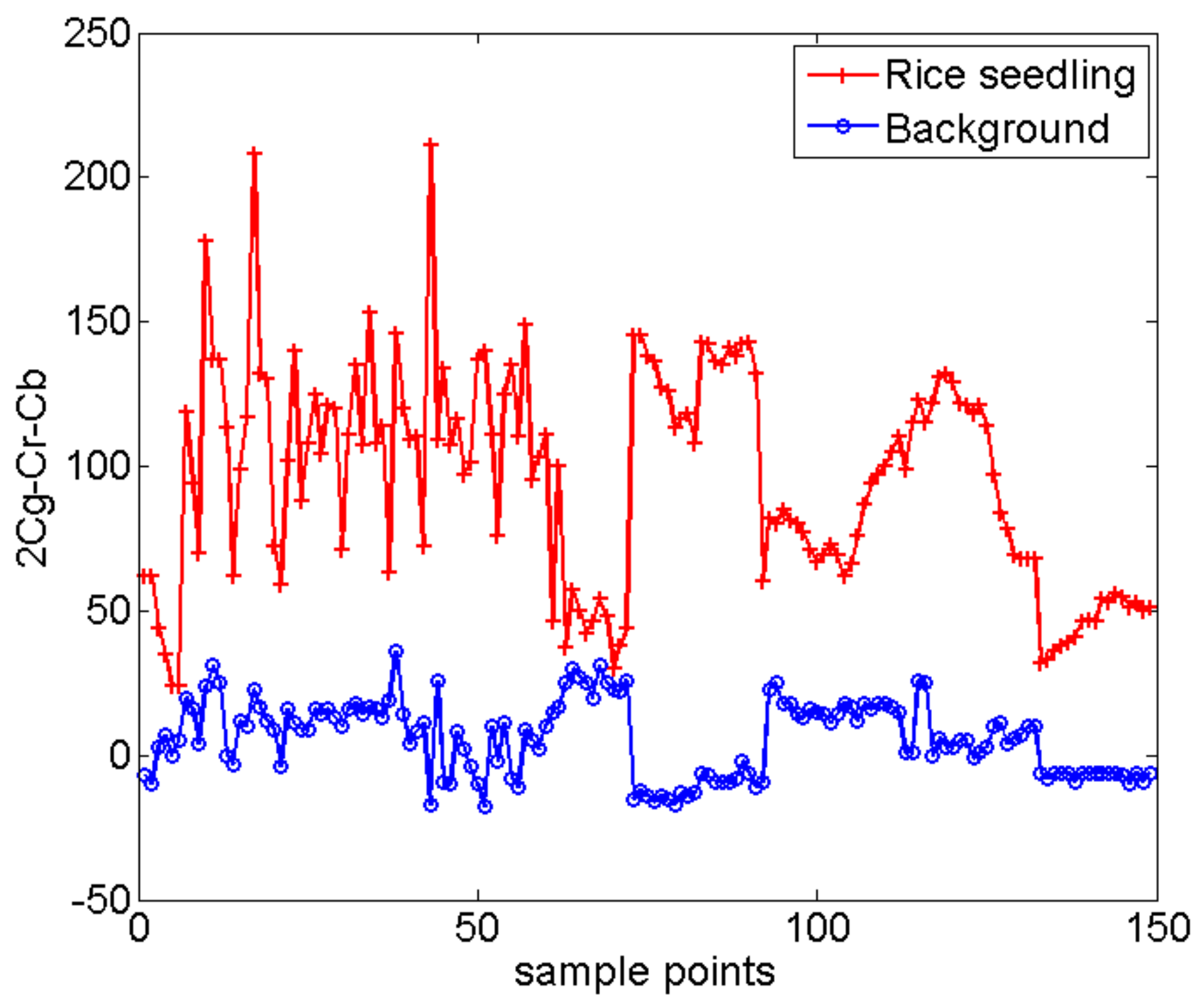
2.4. Image Graying Based on Color Index
2.5. Improved Otsu Method for Rice Seedling Segmentation
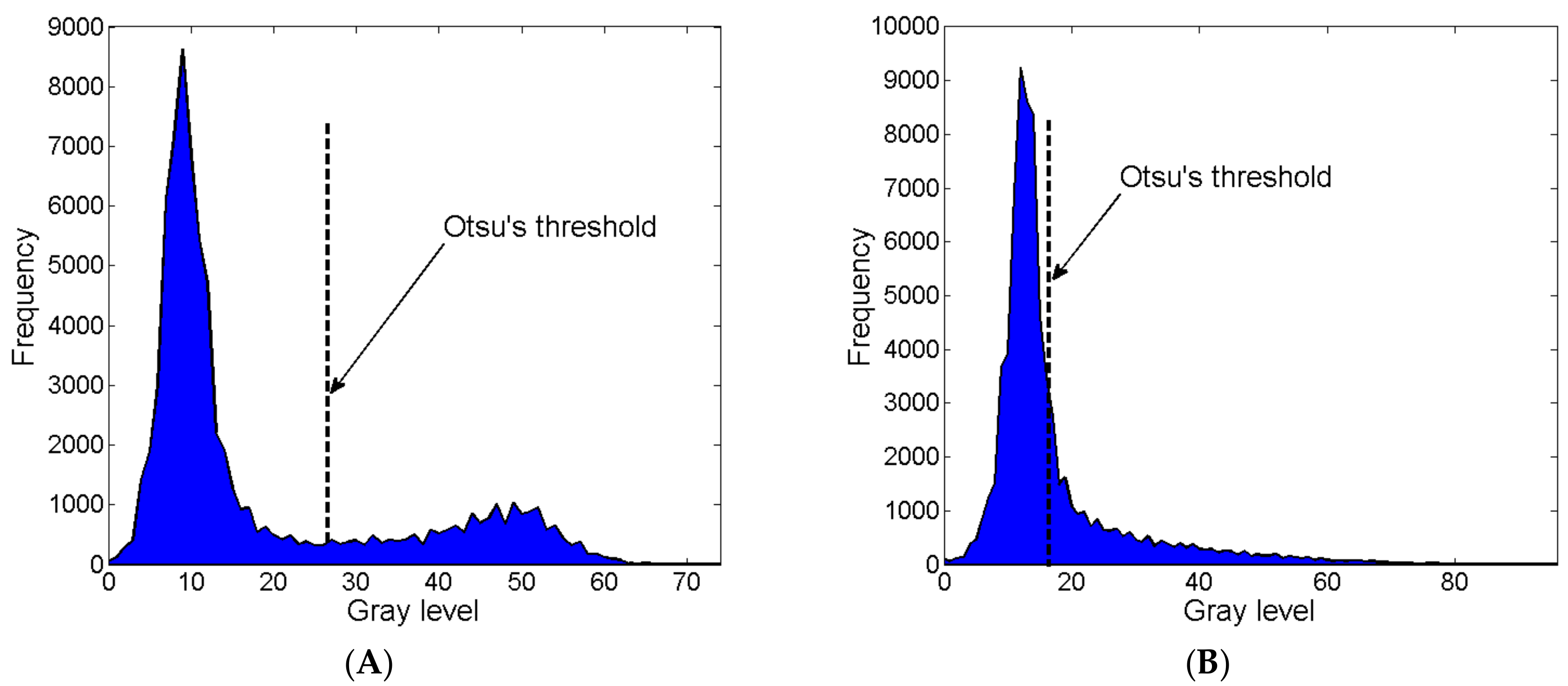
2.5.1. The Otsu Method
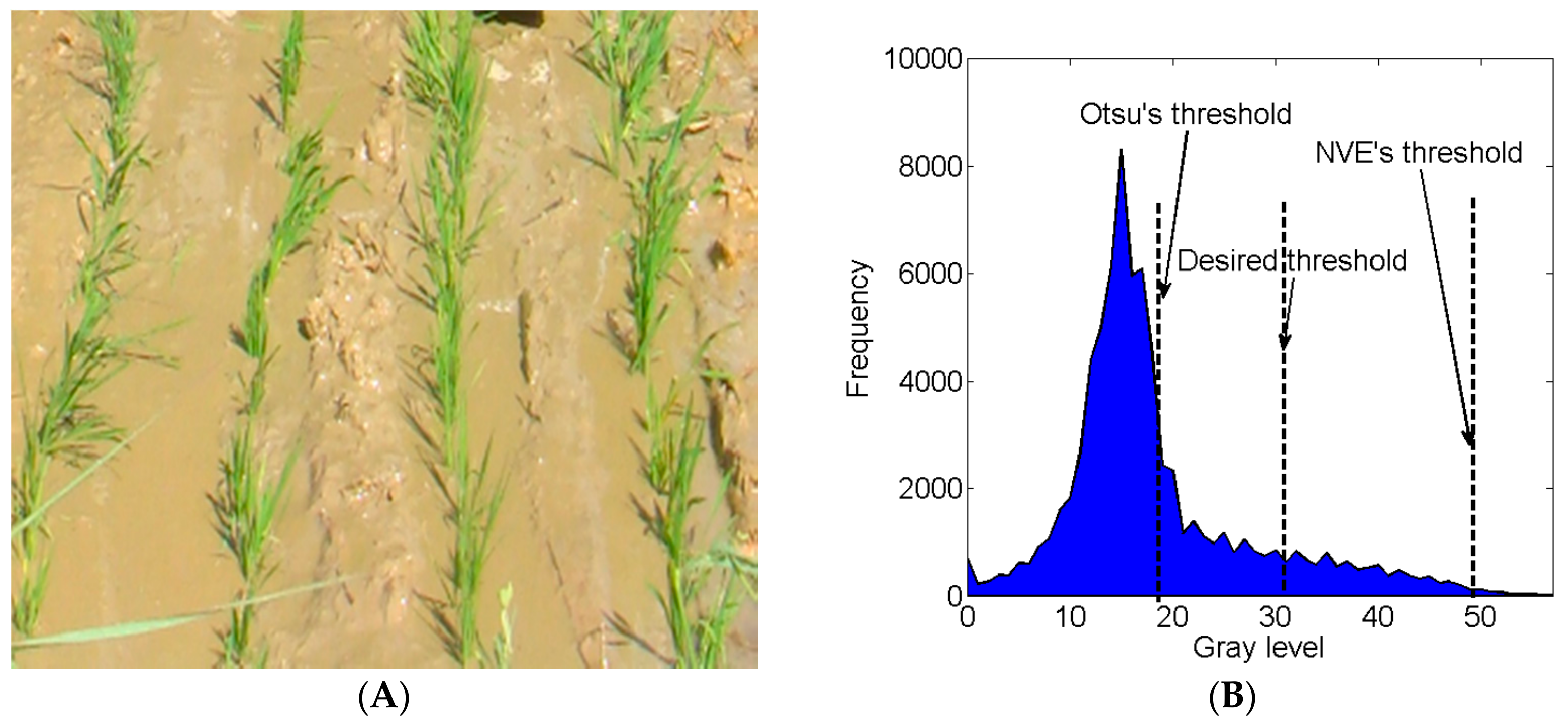
2.5.2. Improvement to the Otsu Method
2.6. Rice Seedling Segmentation Procedure
- Step 1: Convert an input image into the YCrCb color space with Equation (1) and compute Cb component using Equation (2).
- Step 2: Calculate the color-index, defined as 2Cg-Cr-Cb, to obtain the gray image.
- Step 3: Compute the total mean of the gray image obtained from Step 2.
- Step 4: Set the initial threshold t to the total mean .
- Step 5: Classify the gray value i according to the threshold t. If i < t, assign the pixel to background class, or assign it to rice seedling class.
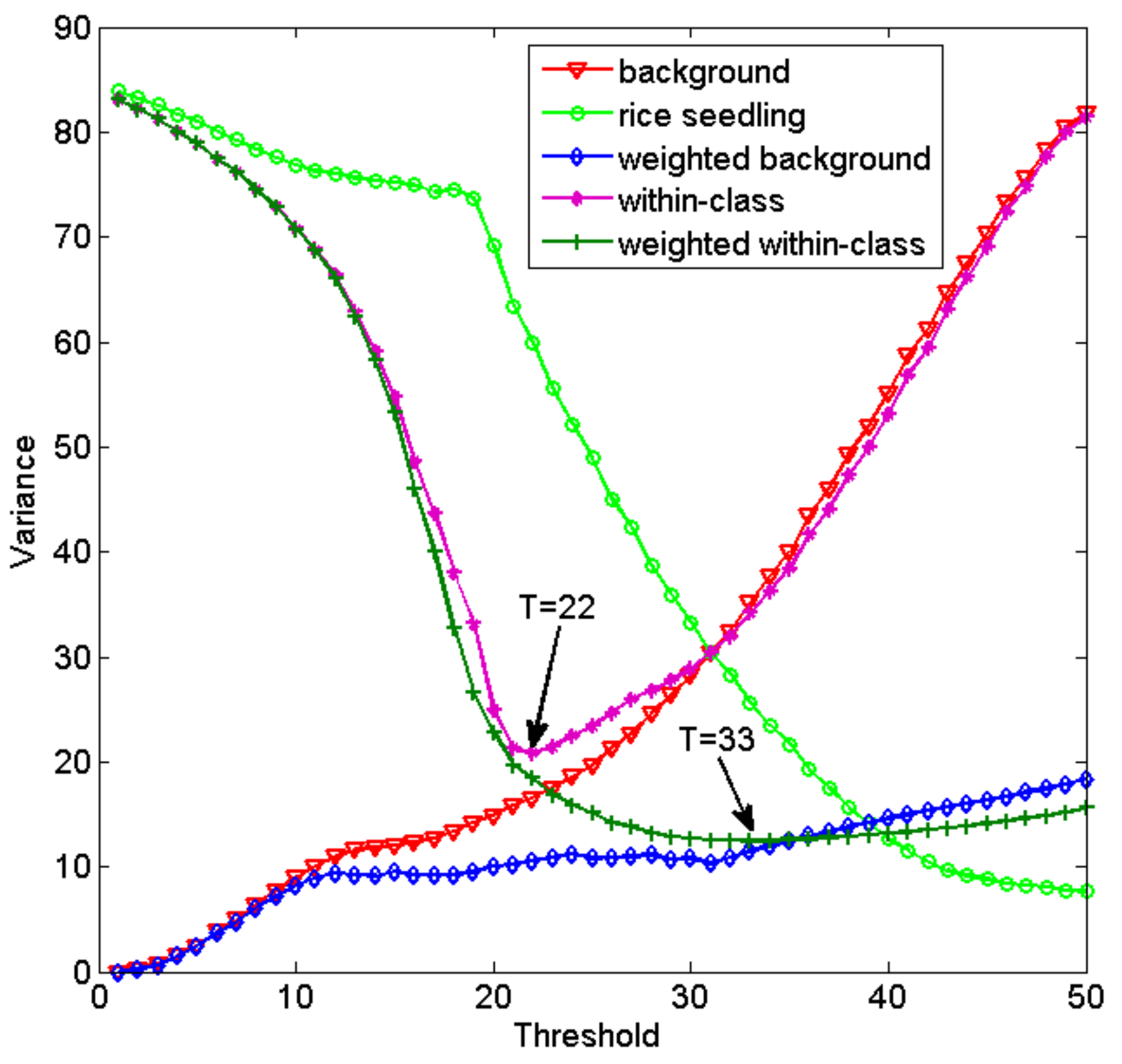
- Step 6: Calculate the gray level probability , the average value and the variance in the background class, and perform the same operation for , and in the rice seedling class.
- Step 7: Compute the within-class variance according to Equation (14) and t = t + 1.
- Step 8: Loop the process from Step 5 to Step 7 and find the minimum within-class variance using Equation (15). Next, set the threshold T to t at the minimum within-class variance.
- Step 9: Classify the pixel as rice seedling if i > T, or as belonging to the background otherwise.
3. Experimental Results and Discussion
3.1. Comparison of Different Approaches in Image Gray Processing
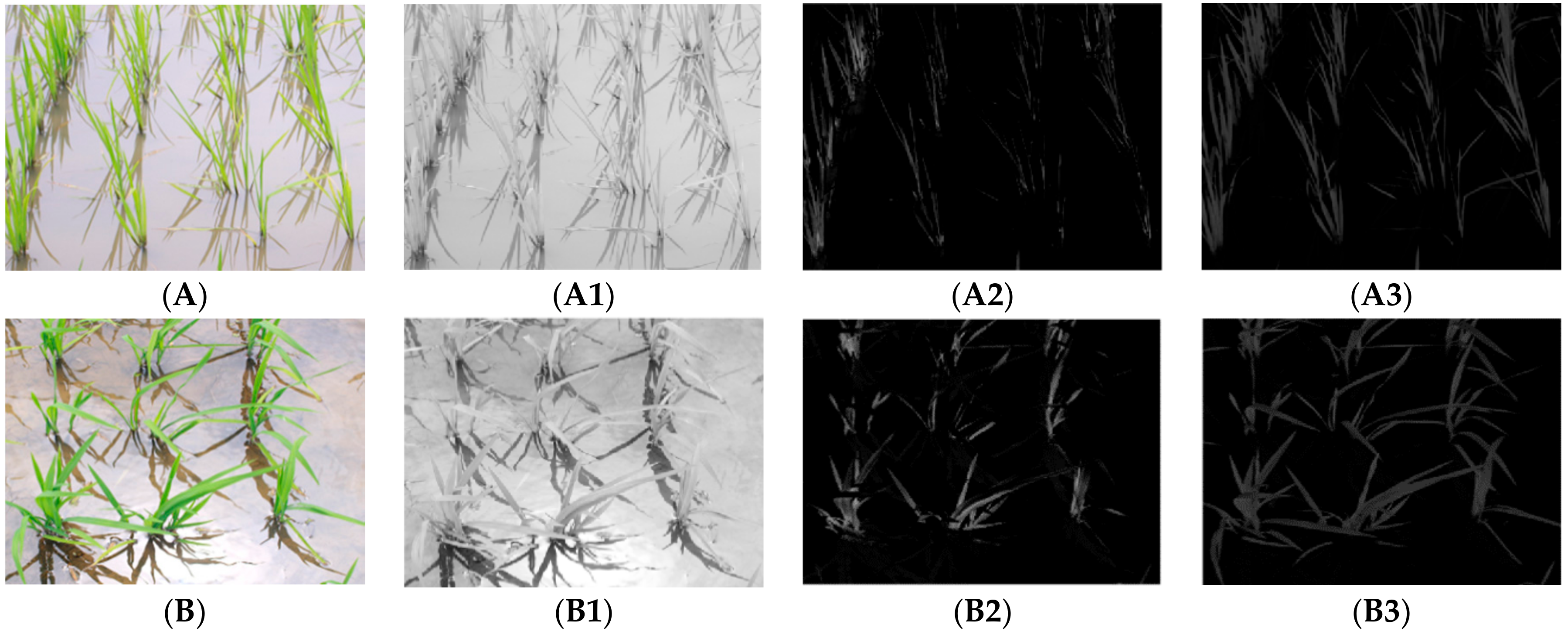
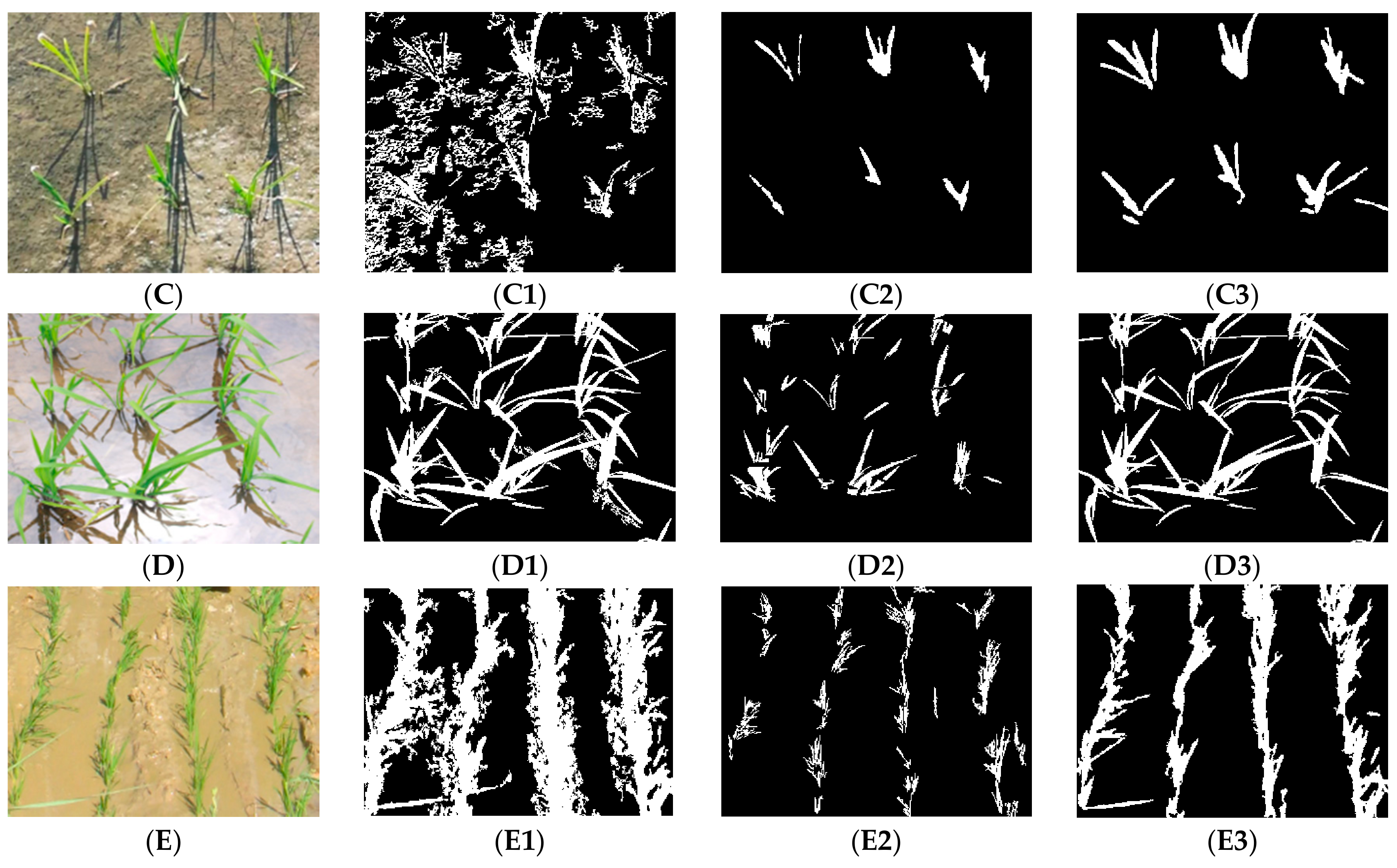
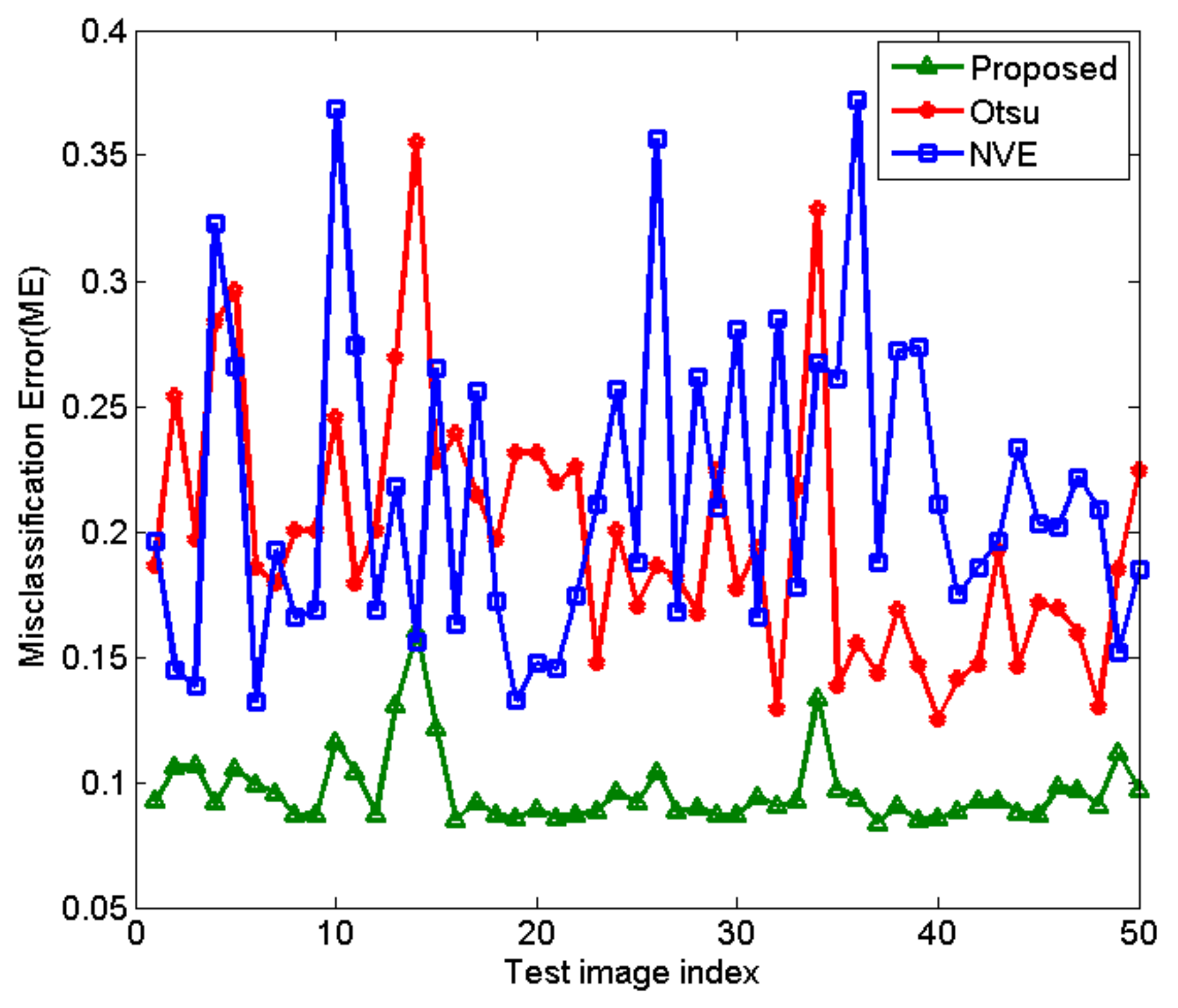
3.2. Comparison of Segmentation Performance
3.3. Processing Time Comparison
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aravind, K.R.; Raja, P.; Ruiz, M.P. Task-based agricultural mobile robots in arable farming: A review. Span. J. Agric. Res. 2017, 15, 16. [Google Scholar] [CrossRef]
- Mousazadeh, H.A. Technical review on navigation systems of agricultural autonomous off-road vehicles. J. Terramech. 2013, 50, 211–232. [Google Scholar] [CrossRef]
- Nagasaka, Y.; Tamaki, K.; Nishiwaki, K.; Saito, M.; Motobayashi, K.; Kikuchi, Y.; Hosokawa, H. Autonomous rice field operation project in NARO. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; IEEE: Piscataway, NJ, USA; pp. 870–874. [Google Scholar]
- Zhang, Z.; Noguchi, N.; Ishii, K.; Yang, L.; Zhang, C. Development of a robot combine harvester for wheat and paddy harvesting. IFAC Proc. Vol. 2013, 46, 45–48. [Google Scholar] [CrossRef]
- Tarannum, N.; Rhaman, M.K.; Khan, S.A.; Shakil, S.R. A brief overview and systematic approach for using agricultural robot in developing countries. J. Mod. Sci. Technol. 2015, 3, 88–101. [Google Scholar]
- Nagasaka, Y.; Tamaki, K.; Nishiwaki, K.; Saito, M.; Kikuchi, Y.; Motobayashi, K. A global positioning system guided automated rice transplanter. IFAC Proc. Vol. 2013, 46, 41–46. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Pérez-Ruiza, M.; Gonzalez-De-Santos, P.; Ribeiro, A.; Fernandez-Quintanilla, C.; Peruzzi, A.; Vieri, M.; Tomic, S.; Agüera, J. Highlights and preliminary results for autonomous crop protection. Comput. Electron. Agric. 2015, 110, 150–161. [Google Scholar] [CrossRef] [Green Version]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- García-Santillán, I.D.; Pajares, G. On-line crop/weed discrimination through the Mahalanobis distance from images in maize fields. Biosyst. Eng. 2018, 166, 28–43. [Google Scholar] [CrossRef]
- Søgaard, H.T.; Olsen, H.J. Determination of crop rows by image analysis without segmentation. Comput. Electron. Agric. 2003, 38, 141–158. [Google Scholar] [CrossRef] [Green Version]
- Hague, T.; Tillett, N.D.; Wheeler, H. Automated crop and weed monitoring in widely spaced cereals. Precis. Agric. 2006, 7, 21–32. [Google Scholar] [CrossRef]
- Meyer, G.E.; Neto, J.C. Verification of color vegetation indices for automated crop imaging applications. Comput. Electron. Agric. 2008, 63, 282–293. [Google Scholar] [CrossRef]
- Guijarro, M.; Pajares, G.; Riomoros, I.; Herrera, P.J.; Burgos-Artizzu, X.P.; Ribeiro, A. Automatic segmentation of relevant textures in agricultural images. Comput. Electron. Agric. 2011, 75, 75–83. [Google Scholar] [CrossRef] [Green Version]
- Burgos-Artizzu, X.P.; Ribeiro, A.; Guijarro, M.; Pajares, G. Real-time image processing for crop/weed discrimination in maize fields. Comput. Electron. Agric. 2011, 75, 337–346. [Google Scholar] [CrossRef] [Green Version]
- Hamuda, E.; McGinley, B.; Glavin, M.; Jones, E. Automatic crop detection under field conditions using the HSV colour space and morphological operations. Comput. Electron. Agric. 2017, 133, 97–107. [Google Scholar] [CrossRef]
- Bai, X.D.; Cao, Z.; Wang, Y.; Yu, Z.; Hu, Z.; Zhang, X.; Li, C. Vegetation segmentation robust to illumination variations based on clustering and morphology modeling. Biosyst. Eng. 2014, 125, 80–97. [Google Scholar] [CrossRef]
- Guo, W.; Rage, U.K.; Ninomiya, S. Illumination invariant segmentation of vegetation for time series wheat images based on decision tree model. Comput. Electron. Agric. 2013, 96, 58–66. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Pajares, G.; Montalvo, M.; Romeo, J.; Guijarro, M. Support vector machines for crop/weeds identification in maize fields. Expert Syst. Appl. 2012, 39, 11149–11155. [Google Scholar] [CrossRef]
- Garcia-Lamont, F.; Cervantes, J.; López, A.; Rodriguez, L. Segmentation of images by color features: A survey. Neurocomputing 2018, 292, 1–27. [Google Scholar] [CrossRef]
- Shaik, K.B.; Ganesan, P.; Kalist, V.; Sathish, B.S.; Jenitha, J.M. Comparative study of skin color detection and segmentation in HSV and YCbCr color space. Procedia Comput. Sci. 2015, 57, 41–48. [Google Scholar] [CrossRef]
- Tellaeche, A.; Burgos-Artizzu, X.P.; Pajares, G.; Ribeiro, A. A vision-based method for weeds identification through the Bayesian decision theory. Pattern Recognit. 2008, 41, 521–530. [Google Scholar] [CrossRef]
- Hernández-Hernández, J.L.; Ruiz-Hernández, J.; García-Mateos, G.; González-Esquiva, J.M.; Ruiz-Canales, A.; Molina-Martínez, J.M. A new portable application for automatic segmentation of plants in agriculture. Agric. Water Manag. 2017, 183, 146–157. [Google Scholar] [CrossRef]
- Goh, T.Y.; Basah, S.N.; Yazid, H.; Safar, M.J.A.; Saad, F.S.A. Performance analysis of image thresholding: Otsu technique. Measurement 2018, 114, 298–307. [Google Scholar] [CrossRef]
- Xu, X.; Xu, S.; Jin, L.; Song, E. Characteristic analysis of Otsu threshold and its applications. Pattern Recognit. Lett. 2011, 32, 956–961. [Google Scholar] [CrossRef]
- Fan, J.L.; Lei, B. A modified valley-emphasis method for automatic thresholding. Pattern Recognit. Lett. 2012, 33, 703–708. [Google Scholar] [CrossRef]
- Sezgin, M.; Sankur, B. Survey over image thresholding techniques and quantitative performance evaluation. J. Electron. Imaging 2004, 13, 146–166. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Resolution | Otsu | NVE | Proposed |
|---|---|---|---|
| 320 × 237 | 0.005 | 0.027 | 0.003 |
| 720 × 576 | 0.014 | 0.122 | 0.009 |
| 1327 × 1000 | 0.047 | 3.851 | 0.031 |
| 2560 × 1920 | 0.204 | 13.385 | 0.119 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, J.; Wang, Y.; Yin, J.; Liu, L.; Zhang, S.; Zhu, D. Segmentation of Rice Seedlings Using the YCrCb Color Space and an Improved Otsu Method. Agronomy 2018, 8, 269. https://doi.org/10.3390/agronomy8110269
Liao J, Wang Y, Yin J, Liu L, Zhang S, Zhu D. Segmentation of Rice Seedlings Using the YCrCb Color Space and an Improved Otsu Method. Agronomy. 2018; 8(11):269. https://doi.org/10.3390/agronomy8110269
Chicago/Turabian StyleLiao, Juan, Yao Wang, Junnan Yin, Lu Liu, Shun Zhang, and Dequan Zhu. 2018. "Segmentation of Rice Seedlings Using the YCrCb Color Space and an Improved Otsu Method" Agronomy 8, no. 11: 269. https://doi.org/10.3390/agronomy8110269
APA StyleLiao, J., Wang, Y., Yin, J., Liu, L., Zhang, S., & Zhu, D. (2018). Segmentation of Rice Seedlings Using the YCrCb Color Space and an Improved Otsu Method. Agronomy, 8(11), 269. https://doi.org/10.3390/agronomy8110269