
Correlating Traffic Data, Spectral Noise and Air Pollution Measurements: Retrospective Analysis of Simultaneous Measurements near a Highway in The Netherlands


Abstract
:1. Introduction
2. Materials and Methods
2.1. Measurement Campaign
2.2. Air Pollution Measurements
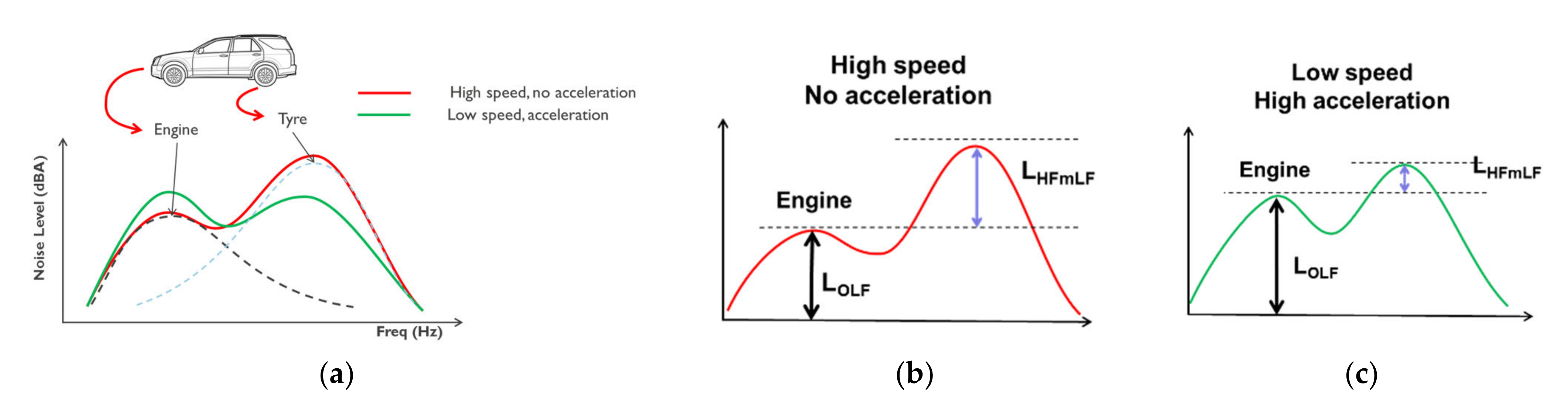
2.3. Noise Pollution Measurements
2.4. Traffic and Meteorological Data
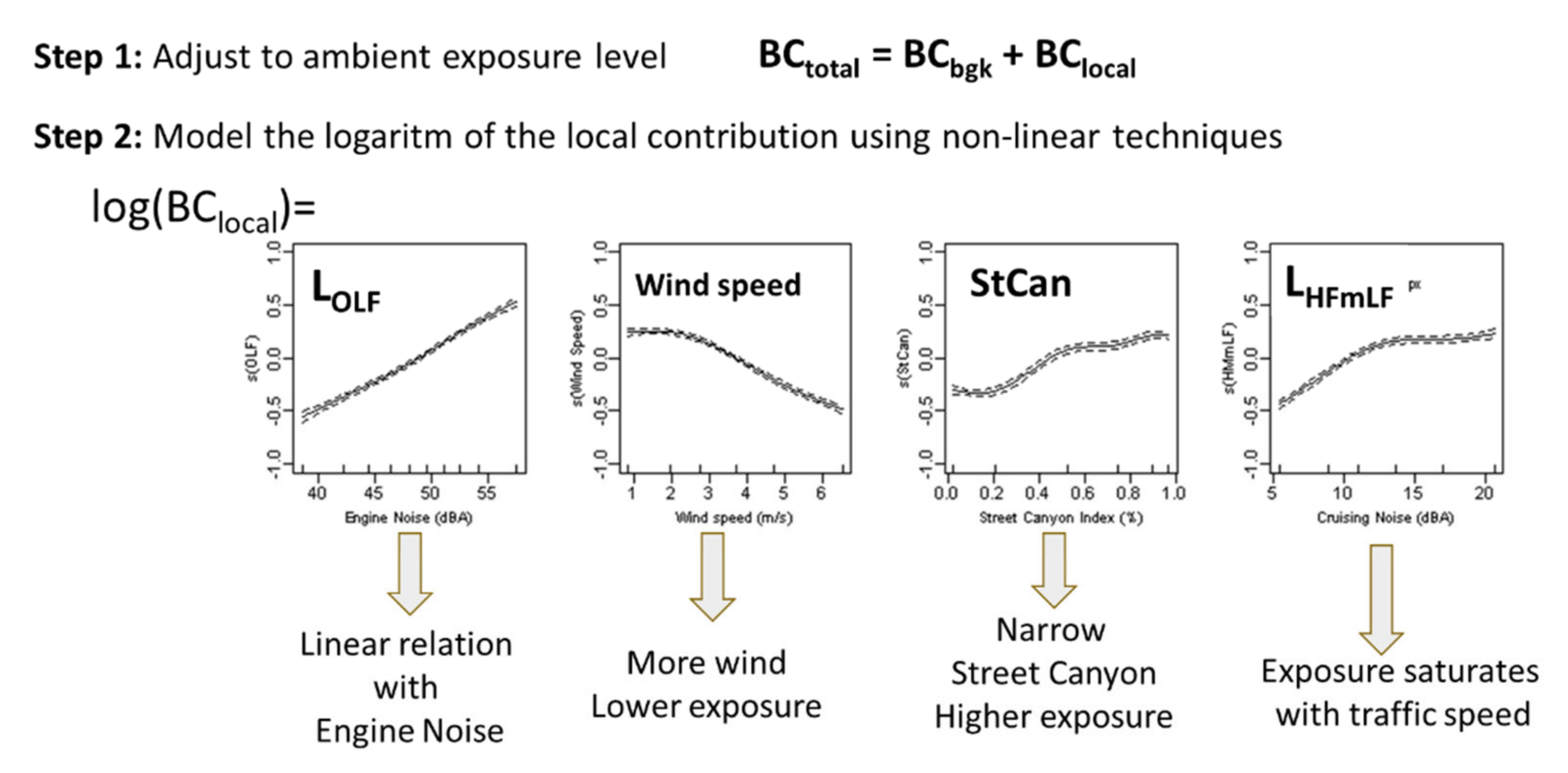
2.5. Modeling Approach
3. Results
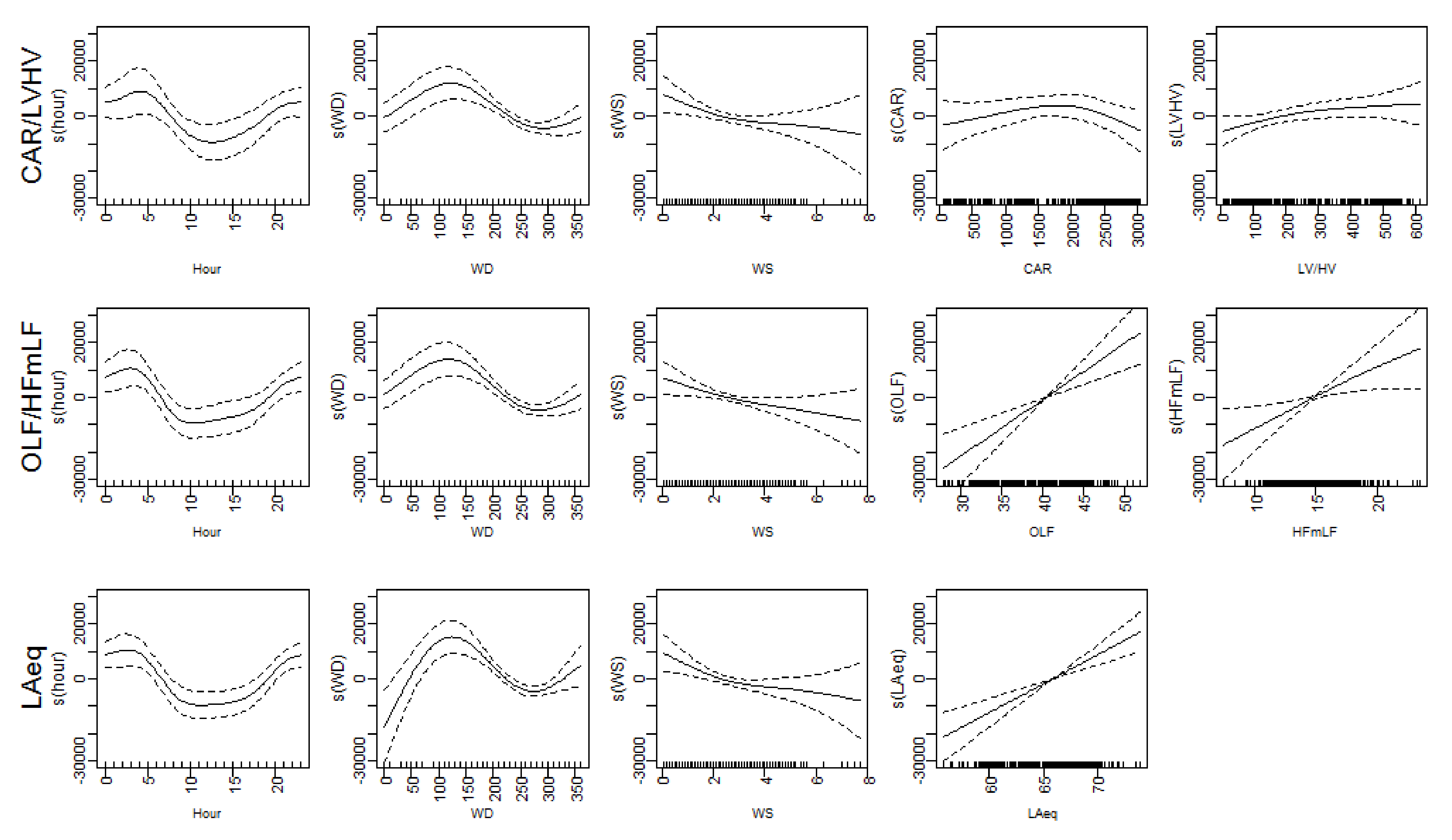
3.1. Traffic-Noise Models
3.1.1. Basic Traffic-Noise Models
3.1.2. Meteorology Extended Traffic-Noise Models
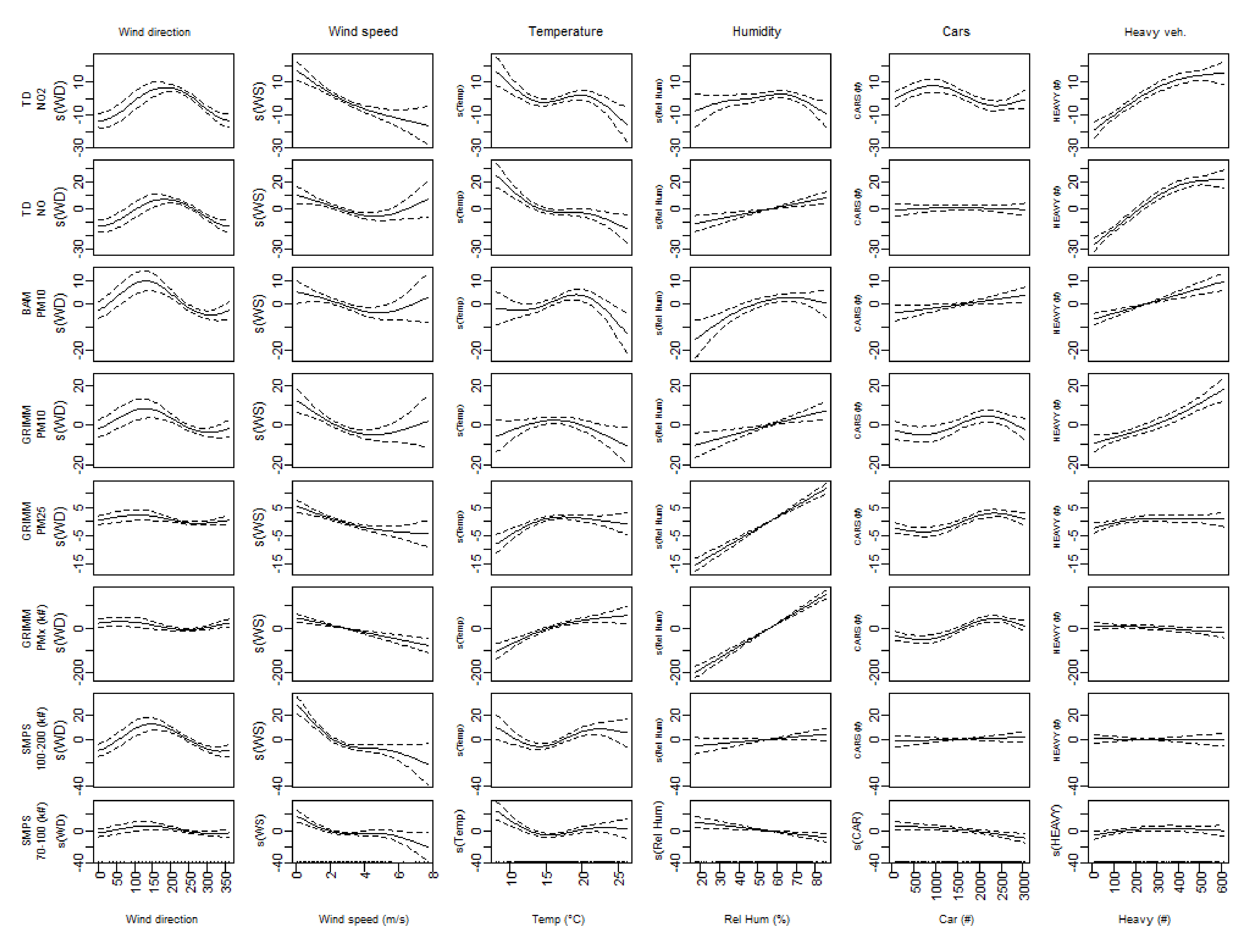
3.2. Traffic-Air Pollution Models
3.2.1. Basic Traffic-Air Pollution Models
3.2.2. Meteorology Extended Traffic Air Pollution Models
3.3. Noise-Air Pollution Models
3.3.1. Basic Noise-Air Pollution Models
3.3.2. Meteorology Extended Noise-Air Pollution Models
3.4. Comparison of the Noise and Traffic Models for Air Pollution
3.5. Different Behavior of PM and UFP Fractions
4. Discussion
4.1. Limitations
4.2. Behavioral Difference between Air Pollutants
4.3. Noise as a Traffic Proxy
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tetreault, L.F.; Perron, S.; Smargiassi, A. Cardiovascular health, traffic-related air pollution and noise: Are associations mutually confounded? A systematic review. Int. J. Public Health 2013, 58, 649–666. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Allen, R.W.; Davies, H.; Cohen, M.A.; Mallach, G.; Kaufman, J.; Adar, S.D. The spatial relationship between traffic-generated air pollution and noise in 2 US cities. Environ. Res. 2009, 109, 334–342. [Google Scholar] [CrossRef] [Green Version]
- Fecht, D.; Hansell, A.; Morley, D.; Dajnak, D.; Vienneau, D.; Beevers, S.; Toledano, M.B.; Kelly, F.J.; Anderson, H.R.; Gulliver, J. Spatial and temporal associations of road traffic noise and air pollution in London: Implications for epidemiological studies. Environ. Int. 2016, 88, 235–242. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Davies, H.W.; Vlaanderen, J.J.; Henderson, S.B.; Brauer, M. Correlation between co-exposures to noise and air pollution from traffic sources. Occup. Environ. Med. 2009, 66, 347–350. [Google Scholar] [CrossRef] [PubMed]
- Ross, Z.; Kheirbek, I.; Clougherty, J.E.; Ito, K.; Matte, T.; Markowitz, S.; Eisl, H. Noise, air pollutants and traffic: Continuous measurement and correlation at a high-traffic location in New York City. Environ. Res. 2011, 111, 1054–1063. [Google Scholar] [CrossRef]
- Kim, K.-H.; Ho, D.X.; Brown, R.J.; Oh, J.-M.; Park, C.G.; Ryu, I.C. Some insights into the relationship between urban air pollution and noise levels. Sci. Total Environ. 2012, 424, 271–279. [Google Scholar] [CrossRef] [PubMed]
- Gan, W.Q.; McLean, K.; Brauer, M.; Chiarello, S.A.; Davies, H.W. Modeling population exposure to community noise and air pollution in a large metropolitan area. Environ. Res. 2012, 116, 11–16. [Google Scholar] [CrossRef]
- Kheirbek, I.; Ito, K.; Neitzel, R.; Kim, J.; Johnson, S.; Ross, Z.; Eisl, H.; Matte, T. Spatial variation in environmental noise and air pollution in New York City. J. Urban Health 2014, 91, 415–431. [Google Scholar] [CrossRef] [Green Version]
- Dekoninck, L.; Botteldooren, D.; Panis, L.I. An Instantaneous Spatiotemporal Model to Predict a Bicyclist’s Black Carbon Exposure Based on Mobile Noise Measurements. Atmos. Environ. 2013, 79, 623–631. [Google Scholar] [CrossRef] [Green Version]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); EUR 25379 EN; Publications Office of the European Union: Luxembourg, 2012; JRC72550. [Google Scholar] [CrossRef]
- Ntziachristos, L.; Gkatzoflias, D.; Kouridis, C.; Samaras, Z. COPERT: A European road transport emission inventory model. In Information Technologies in Environmental Engineering; Springer: Berlin/Heidelberg, Germany, 2009; pp. 491–504. [Google Scholar] [CrossRef]
- Dekoninck, L.; Botteldooren, D.; Panis, L.I.; Hankey, S.; Jain, G.; Karthik, S.; Marshall, J. Applicability of a noise-based model to estimate in-traffic exposure to black carbon and particle number concentrations in different cultures. Environ. Int. 2015, 74, 89–98. [Google Scholar] [CrossRef] [Green Version]
- Dekoninck, L.; Yang, Q.; Zhao, H.; Ross, J.; Jack, D.; Chillrud, S. An international application of the city-wide mobile noise mapping methodology: Retro-active traffic attribution on a bicycle commuters health study in New York City. In Inter-Noise and Noise-Con Congress and Conference Proceedings; Institute of Noise Control Engineering: Madrid, Spain, 2019; Volume 259, pp. 3265–3276. [Google Scholar]
- Dekoninck, L.; Botteldooren, D.; Panis, L.I. Using city-wide mobile noise assessments to estimate annual exposure to Black Carbon. Environ. Int. 2015, 83, 192–201. [Google Scholar] [CrossRef] [Green Version]
- Dekoninck, L.; Hofman, J. Multi-disciplinary sensing for personal exposure assessments: Quantifying the impact of traffic interventions and meteorological variability. In Proceedings of the e-Forum Acusticum, Lyon, France, 20–24 April 2020; pp. 3085–3090. [Google Scholar]
- Severijnen, M. Relations between Traffic-Generated Nitrogen Oxides, Particulate and Ultrafine Particulate Matter and Noise Characteristics at the A2 Motorway Air Quality Station at Maastricht, the Netherlands; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Dominici, F.; McDermott, A.; Zeger, S.L.; Samet, J.M. On the use of generalized additive models in time-series studies of air pollution and health. Am. J. Epidemiol. 2002, 156, 193–203. [Google Scholar] [CrossRef]
- Pearce, J.L.; Beringer, J.; Nicholls, N.; Hyndman, R.J.; Tapper, N.J. Quantifying the influence of local meteorology on air quality using generalized additive models. Atmos. Environ. 2011, 45, 1328–1336. [Google Scholar] [CrossRef]
- Wood, S.N. On confidence intervals for generalized additive models based on penalized regression splines. Aust. N. Z. J. Stat. 2006, 48, 445–464. [Google Scholar] [CrossRef]
- Kozawa, K.H.; Winer, A.M.; Fruin, S.A. Ultrafine particle size distributions near freeways: Effects of differing wind directions on exposure. Atmos. Environ. 2012, 63, 250–260. [Google Scholar] [CrossRef] [Green Version]
- Hsu, H.-H.; Adamkiewicz, G.; Houseman, E.A.; Zarubiak, D.; Spengler, J.D.; Levy, J.I. Contributions of aircraft arrivals and departures to ultrafine particle counts near Los Angeles International Airport. Sci. Total Environ. 2013, 444, 347–355. [Google Scholar] [CrossRef]
- Stacey, B.; Harrison, R.M.; Pope, F. Evaluation of ultrafine particle concentrations and size distributions at London Heathrow Airport. Atmos. Environ. 2020, 222, 117148. [Google Scholar] [CrossRef]
- Choi, W.; Hu, S.; He, M.; Kozawa, K.; Mara, S.; Winer, A.M.; Paulson, S.E. Neighborhood-scale air quality impacts of emissions from motor vehicles and aircraft. Atmos. Environ. 2013, 80, 310–321. [Google Scholar] [CrossRef]
- Mazaheri, M.; Bostrom, T.E.; Johnson, G.R.; Morawska, L. Composition and morphology of particle emissions from in-use aircraft during takeoff and landing. Environ. Sci. Technol. 2013, 47, 5235–5242. [Google Scholar] [CrossRef] [Green Version]
- Harrison, R.M.; Allan, J.; Carruthers, D.; Heal, M.R.; Lewis, A.C.; Marner, B.; Murrells, T.; Williams, A. Non-exhaust vehicle emissions of particulate matter and VOC from road traffic: A review. Atmos. Environ. 2021, 262, 118592. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| F-Value | Evaluation | p-Value | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Traffic to Noise | Intercept | WD | WS | Temperature | Rel Hum | Cars (#) | Heavy (#) | Dev. Expl. | AIC | WD | WS | Temperature | Rel. Hum | Cars (#) | Heavy (#) |
| LAeq_base | 65.9 | 7.2 | 6.8 | - | - | 12.6 | 141.4 | 0.78 | 1280 | *** | ** | · | · | *** | *** |
| LAeq_meteo | 65.9 | 3.8 | 8.2 | 10.2 | 5.8 | 22.5 | 123.1 | 0.83 | 1210 | ** | *** | *** | *** | *** | *** |
| OLF_base | 40.5 | 2.7 | 14.8 | - | - | 52.2 | 202.8 | 0.88 | 1352 | * | *** | · | · | *** | *** |
| OLF_meteo | 40.5 | 0.3 | 19.9 | 13.4 | 5.1 | 49.9 | 202.4 | 0.90 | 1296 | · | *** | *** | ** | *** | *** |
| F-Value | Evaluation | p-Value | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Traffic | Intercept | WD | WS | Temperature | Rel Hum | Cars (#) | Heavy (#) | Dev. Expl. | AIC | WD | WS | Temperature | Rel Hum | Cars (#) | Heavy (#) |
| BAM_PM10_meteo | 32.6 | 15.1 | 3.6 | 4.8 | 5.8 | 4.7 | 25.9 | 0.30 | 2594 | *** | * | ** | *** | * | *** |
| TD_NO_meteo | 20.1 | 22.3 | 6.6 | 12.1 | 13.8 | 0.5 | 71.4 | 0.66 | 2596 | *** | *** | *** | *** | · | *** |
| TD_NO2_meteo | 37.6 | 24.5 | 18.1 | 7.2 | 2.4 | 4.9 | 36.1 | 0.51 | 2623 | *** | *** | *** | * | ** | *** |
| TD_NOx_meteo | 57.3 | 32.0 | 14.0 | 12.1 | 3.8 | 1.3 | 63.5 | 0.63 | 3004 | *** | *** | *** | * | · | *** |
| GRI_PM10_meteo | 30.1 | 7.6 | 7.4 | 3.6 | 10.0 | 2.9 | 21.7 | 0.35 | 2758 | *** | *** | * | ** | * | *** |
| GRI_PM25_meteo | 15.7 | 2.8 | 12.6 | 9.7 | 175 | 7.3 | 2.8 | 0.54 | 2142 | * | *** | *** | *** | *** | . |
| GRI_PM1_meteo | 11.5 | 2.5 | 13.4 | 12.9 | 222 | 8.8 | 1.8 | 0.55 | 2053 | * | *** | *** | *** | *** | · |
| GRI_PMx_meteo | 124,388 | 3.9 | 24.9 | 19.2 | 248 | 11.6 | 2.3 | 0.54 | 8428 | ** | *** | *** | *** | *** | · |
| SMP_500to850_meteo | 285.9 | 6.2 | 15.6 | 20.0 | 29.7 | 1.0 | 16.2 | 0.49 | 4556 | *** | *** | *** | *** | · | *** |
| SMP_200to500_meteo | 9572.5 | 12.5 | 24.3 | 27.2 | 99.5 | 9.7 | 4.2 | 0.42 | 6601 | *** | *** | *** | *** | *** | * |
| SMP_100to200_meteo | 31,575 | 20.4 | 23.2 | 7.6 | 2.7 | 0.5 | 0.0 | 0.37 | 7457 | *** | *** | *** | · | · | · |
| SMP_70to100_meteo | 30,645 | 3.8 | 9.2 | 9.6 | 9.7 | 4.8 | 1.9 | 0.30 | 7463 | ** | *** | *** | ** | * | · |
| SMP_50to70_meteo | 44,638 | 0.3 | 6.1 | 6.0 | 12.1 | 11.8 | 1.8 | 0.25 | 7827 | · | ** | ** | *** | *** | · |
| SMP_30to50_meteo | 74,991 | 0.4 | 9.1 | 4.7 | 11.0 | 13.1 | 9.9 | 0.22 | 8215 | · | *** | * | *** | *** | ** |
| SMP_20to30_meteo | 46,428 | 3.5 | 8.6 | 5.2 | 12.3 | 4.3 | 8.3 | 0.22 | 7956 | ** | *** | ** | *** | * | *** |
| SMP_min20_meteo | 54,159 | 14.8 | 6.5 | 5.9 | 3.2 | 0.9 | 5.0 | 0.22 | 8131 | *** | ** | *** | . | · | ** |
| BAM_PM10_base | 32.6 | 4.3 | 5.4 | - | - | 0.9 | 30.6 | 0.19 | 2632 | ** | ** | · | · | · | *** |
| TD_NO_base | 20.1 | 27.6 | 5.0 | - | - | 10.6 | 67.6 | 0.55 | 2681 | *** | ** | · | · | ** | *** |
| TD_NO2_base | 37.6 | 23.5 | 16.3 | - | - | 7.1 | 39.9 | 0.44 | 2651 | *** | *** | · | · | *** | *** |
| TD_NOx_base | 57.3 | 32.4 | 10.7 | - | - | 6.5 | 68.5 | 0.55 | 3060 | *** | *** | · | · | *** | *** |
| GRI_PM10_base | 30.1 | 1.9 | 9.3 | - | - | 0.3 | 26.7 | 0.26 | 2790 | * | *** | · | · | · | *** |
| GRI_PM25_base | 15.7 | 0.0 | 12.0 | - | - | 2.1 | 6.4 | 0.13 | 2341 | · | *** | · | · | . | ** |
| GRI_PM1_base | 11.5 | 2.1 | 9.8 | - | - | 1.7 | 2.5 | 0.13 | 2270 | * | *** | · | · | . | . |
| GRI_PMx_base | 124,388 | 2.3 | 11.1 | - | - | 2.4 | 0.7 | 0.14 | 8636 | * | *** | · | · | * | · |
| SMP_500to850_base | 285.9 | 0.0 | 29.1 | - | - | 1.5 | 13.2 | 0.25 | 4674 | · | *** | · | · | · | *** |
| SMP_200to500_base | 9572 | 4.4 | 23.7 | - | - | 7.4 | 0.0 | 0.22 | 6692 | ** | *** | · | · | ** | · |
| SMP_100to200_base | 31,575 | 21.1 | 21.5 | - | - | 1.5 | 0.1 | 0.32 | 7474 | *** | *** | · | · | · | · |
| SMP_70to100_base | 30,645 | 10.0 | 4.3 | - | - | 3.6 | 2.6 | 0.21 | 7496 | *** | * | · | · | * | . |
| SMP_50to70_base | 44,638 | 4.7 | 4.3 | - | - | 2.4 | 1.7 | 0.07 | 7889 | ** | * | · | · | · | · |
| SMP_30to50_base | 74,991 | 4.6 | 7.4 | - | - | 3.6 | 3.4 | 0.11 | 8251 | ** | *** | · | · | . | * |
| SMP_20to30_base | 46,428 | 6.0 | 7.9 | - | - | 5.1 | 7.5 | 0.17 | 7967 | *** | *** | · | · | * | *** |
| SMP_min20_base | 54,159 | 16.5 | 5.7 | - | - | 3.7 | 5.5 | 0.17 | 8143 | *** | ** | · | · | . | ** |
| F-Value | Evaluation | p-Value | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noise | Intercept | WD | WS | Temperature | Rel. Hum. | OLF | HFmLF | Dev. Expl. | AIC | WD | WS | Temperature | Rel. Hum. | OLF | HFmLF |
| BAM_PM10_meteo | 32.6 | 13.4 | 10.8 | 7.5 | 5.2 | 6.0 | 2.5 | 0.28 | 2602 | *** | ** | *** | ** | ** | · |
| TD_NO_meteo | 20.1 | 28.4 | 68.2 | 6.9 | 7.1 | 80.6 | 10.4 | 0.73 | 2525 | *** | *** | *** | ** | *** | *** |
| TD_NO2_meteo | 37.6 | 29.2 | 95.8 | 8.0 | 1.4 | 27.4 | 8.4 | 0.52 | 2611 | *** | *** | *** | · | *** | *** |
| TD_NOx_meteo | 57.3 | 38.0 | 105.4 | 9.1 | 1.6 | 62.6 | 12.1 | 0.68 | 2955 | *** | *** | *** | · | *** | *** |
| GRI_PM10_meteo | 30.1 | 7.7 | 6.9 | 8.6 | 8.2 | 6.7 | 2.4 | 0.26 | 2796 | *** | ** | *** | ** | *** | · |
| GRI_PM25_meteo | 15.7 | 2.7 | 11.8 | 14.1 | 159.6 | 4.3 | 5.3 | 0.51 | 2156 | * | *** | *** | *** | * | * |
| GRI_PM1_meteo | 11.5 | 4.2 | 9.8 | 17.0 | 202.4 | 4.5 | 3.9 | 0.53 | 2063 | ** | *** | *** | *** | * | * |
| GRI_PMx_meteo | 124,388 | 6.2 | 12.6 | 22.9 | 220.2 | 4.9 | 2.2 | 0.52 | 8442 | *** | *** | *** | *** | ** | . |
| SMP_500to850_meteo | 285.9 | 6.0 | 20.5 | 21.5 | 25.4 | 9.2 | 2.1 | 0.49 | 4563 | ** | *** | *** | *** | *** | · |
| SMP_200to500_meteo | 9572 | 10.3 | 19.6 | 39.4 | 20.2 | 27.0 | 9.8 | 0.44 | 6593 | *** | *** | *** | *** | *** | ** |
| SMP_100to200_meteo | 31,575 | 21.3 | 24.5 | 6.5 | 1.2 | 8.3 | 2.5 | 0.39 | 7447 | *** | *** | *** | · | ** | * |
| SMP_70to100_meteo | 30,645 | 5.1 | 8.9 | 11.6 | 11.9 | 4.0 | 9.2 | 0.34 | 7445 | ** | *** | *** | *** | * | *** |
| SMP_50to70_meteo | 44,638 | 1.5 | 4.2 | 6.6 | 11.6 | 2.7 | 3.5 | 0.25 | 7828 | . | * | ** | *** | · | * |
| SMP_30to50_meteo | 74,991 | 2.5 | 5.1 | 4.5 | 10.2 | 4.4 | 1.6 | 0.21 | 8222 | * | ** | * | *** | * | · |
| SMP_20to30_meteo | 46,428 | 5.9 | 5.5 | 13.2 | 14.2 | 14.3 | 1.3 | 0.20 | 7959 | *** | ** | *** | *** | *** | · |
| SMP_min20_meteo | 54,159 | 16.3 | 4.2 | 5.8 | 4.9 | 6.5 | 1.4 | 0.26 | 8117 | *** | * | ** | * | *** | · |
| BAM_PM10_base | 32.6 | 2.6 | 6.5 | - | - | 7.3 | 1.6 | 0.18 | 2638 | * | *** | · | *** | · | |
| TD_NO_base | 20.1 | 36.3 | 32.3 | - | - | 101.7 | 26.3 | 0.70 | 2556 | *** | *** | · | *** | *** | |
| TD_NO2_base | 37.6 | 27.5 | 92.4 | - | - | 30.4 | 8.6 | 0.47 | 2632 | *** | *** | · | *** | *** | |
| TD_NOx_base | 57.3 | 40.5 | 43.6 | - | - | 77.3 | 19.9 | 0.64 | 2981 | *** | *** | · | *** | *** | |
| GRI_PM10_base | 30.1 | 2.6 | 9.3 | - | - | 7.2 | 1.5 | 0.19 | 2824 | * | *** | · | *** | · | |
| GRI_PM25_base | 15.7 | 0.0 | 15.1 | - | - | 4.6 | 5.3 | 0.15 | 2335 | · | *** | · | ** | ** | |
| GRI_PM1_base | 11.5 | 0.8 | 12.7 | - | - | 3.2 | 3.4 | 0.14 | 2265 | · | *** | · | * | . | |
| GRI_PMx_base | 124,388 | 1.6 | 12.7 | - | - | 4.1 | 1.0 | 0.15 | 8632 | . | *** | · | * | · | |
| SMP_500to850_base | 285.9 | 0.0 | 35.4 | - | - | 11.2 | 5.3 | 0.27 | 4665 | · | *** | · | *** | ** | |
| SMP_200to500_base | 9572 | 2.8 | 25.5 | - | - | 27.5 | 7.2 | 0.25 | 6677 | * | *** | · | *** | ** | |
| SMP_100to200_base | 31,575 | 21.4 | 23.8 | - | - | 12.7 | 1.6 | 0.35 | 7462 | *** | *** | · | *** | · | |
| SMP_70to100_base | 30,645 | 10.6 | 6.0 | - | - | 9.3 | 6.3 | 0.22 | 7487 | *** | ** | · | ** | *** | |
| SMP_50to70_base | 44,638 | 5.4 | 4.0 | - | - | 2.1 | 1.1 | 0.06 | 7889 | ** | * | · | . | · | |
| SMP_30to50_base | 74,991 | 4.3 | 4.7 | - | - | 3.6 | 1.6 | 0.11 | 8251 | ** | * | · | . | · | |
| SMP_20to30_base | 46,428 | 7.9 | 5.3 | - | - | 11.2 | 1.5 | 0.16 | 7971 | *** | ** | · | *** | · | |
| SMP_min20_base | 54,159 | 18.4 | 3.4 | - | - | 8.4 | 2.2 | 0.22 | 8127 | *** | * | · | *** | . | |
| Base Models | Meteo Extended Models | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Dev. Expl. | AIC | Dev. Expl. | AIC | ||||||||||
| Traffic | Noise | Delta | Traffic | Noise | Delta | Traffic | Noise | Delta | Traffic | Noise | Delta | ||
| BAM | PM10 | 0.19 | 0.18 | −0.00 | 2632 | 2638 | −6.10 | 0.30 | 0.28 | −0.02 | 2594 | 2602 | −7.88 |
| TD | NO | 0.55 | 0.70 | 0.15 | 2681 | 2556 | 125.02 | 0.66 | 0.73 | 0.07 | 2596 | 2525 | 71.28 |
| TD | NO2 | 0.44 | 0.47 | 0.03 | 2651 | 2632 | 19.46 | 0.51 | 0.52 | 0.01 | 2623 | 2611 | 11.36 |
| TD | NOx | 0.55 | 0.64 | 0.10 | 3060 | 2981 | 79.14 | 0.63 | 0.68 | 0.05 | 3004 | 2955 | 49.06 |
| Grimm | PM10 | 0.26 | 0.19 | −0.07 | 2790 | 2824 | −34.64 | 0.35 | 0.26 | −0.09 | 2758 | 2796 | −38.39 |
| Grimm | PM25 | 0.13 | 0.15 | 0.02 | 2341 | 2335 | 6.40 | 0.54 | 0.51 | −0.03 | 2142 | 2156 | −14.28 |
| Grimm | PM10 | 0.13 | 0.14 | 0.01 | 2270 | 2265 | 5.11 | 0.55 | 0.53 | −0.02 | 2053 | 2063 | −9.97 |
| Grimm | UFP count | 0.14 | 0.15 | 0.01 | 8636 | 8632 | 3.81 | 0.54 | 0.52 | −0.02 | 8428 | 8442 | −13.74 |
| SMPS | UFP 500–850 | 0.25 | 0.27 | 0.02 | 4674 | 4665 | 9.09 | 0.49 | 0.49 | −0.00 | 4556 | 4563 | −6.95 |
| SMPS | UFP 200–500 | 0.22 | 0.25 | 0.03 | 6692 | 6677 | 15.09 | 0.42 | 0.44 | 0.02 | 6601 | 6593 | 8.56 |
| SMPS | UFP 100–200 | 0.32 | 0.35 | 0.03 | 7474 | 7462 | 11.42 | 0.37 | 0.39 | 0.02 | 7457 | 7447 | 9.55 |
| SMPS | UFP 70–100 | 0.21 | 0.22 | 0.01 | 7496 | 7487 | 9.37 | 0.30 | 0.34 | 0.04 | 7463 | 7445 | 18.34 |
| SMPS | UFP 50–70 | 0.07 | 0.06 | −0.01 | 7889 | 7889 | 0.05 | 0.25 | 0.25 | 0.00 | 7827 | 7828 | −0.80 |
| SMPS | UFP 30–50 | 0.11 | 0.11 | 0.00 | 8251 | 8251 | −0.38 | 0.22 | 0.21 | −0.01 | 8215 | 8222 | −7.64 |
| SMPS | UFP 20–30 | 0.17 | 0.16 | −0.01 | 7967 | 7971 | −4.09 | 0.22 | 0.20 | −0.02 | 7956 | 7959 | −3.33 |
| SMPS | UFP < 20 nm | 0.17 | 0.22 | 0.05 | 8143 | 8127 | 16.07 | 0.22 | 0.26 | 0.04 | 8131 | 8117 | 14.15 |
| F-Value | Evaluation | p-Value | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SMPS 70 to 100 | Intercept | Hour | WD | WS | CAR | LVHV | OLF | HFmLF | LAeq | Dev. Expl. | AIC | Hour | WD | WS | CAR | LVHV | OLF | HFmLF | LAeq |
| Hour_traffic | 30,645 | 1.3 | 9.8 | 2.4 | 1.2 | 1.8 | - | - | - | 0.24 | 7490 | ** | *** | · | · | · | |||
| Hour_OLF | 30,645 | 1.9 | 11.7 | 2.5 | - | - | 17.0 | 5.2 | - | 0.25 | 7481 | *** | *** | . | *** | * | |||
| Hour_LAeq | 30,645 | 2.9 | 9.7 | 3.3 | - | - | - | - | 22.5 | 0.28 | 7470 | *** | *** | * | *** | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dekoninck, L.; Severijnen, M. Correlating Traffic Data, Spectral Noise and Air Pollution Measurements: Retrospective Analysis of Simultaneous Measurements near a Highway in The Netherlands. Atmosphere 2022, 13, 740. https://doi.org/10.3390/atmos13050740
Dekoninck L, Severijnen M. Correlating Traffic Data, Spectral Noise and Air Pollution Measurements: Retrospective Analysis of Simultaneous Measurements near a Highway in The Netherlands. Atmosphere. 2022; 13(5):740. https://doi.org/10.3390/atmos13050740
Chicago/Turabian StyleDekoninck, Luc, and Marcel Severijnen. 2022. "Correlating Traffic Data, Spectral Noise and Air Pollution Measurements: Retrospective Analysis of Simultaneous Measurements near a Highway in The Netherlands" Atmosphere 13, no. 5: 740. https://doi.org/10.3390/atmos13050740
APA StyleDekoninck, L., & Severijnen, M. (2022). Correlating Traffic Data, Spectral Noise and Air Pollution Measurements: Retrospective Analysis of Simultaneous Measurements near a Highway in The Netherlands. Atmosphere, 13(5), 740. https://doi.org/10.3390/atmos13050740