
Routine Measurement of Water Vapour Using GNSS in the Framework of the Map-Io Project


Abstract
:1. Introduction
2. GNSS Dataset
2.1. GNSS Measurements
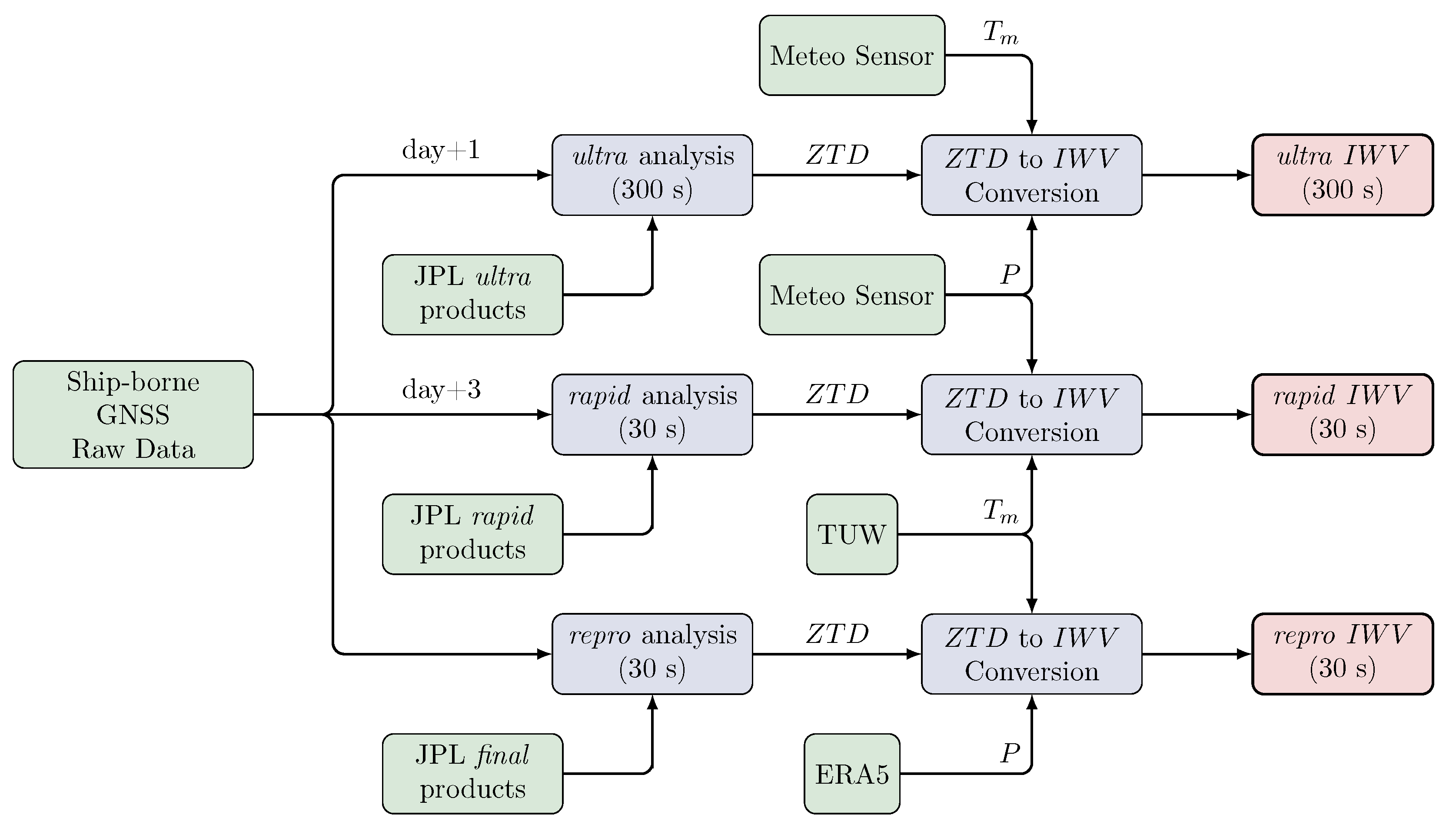
2.2. GNSS Data Analysis
- Two operational daily routine analyses launched each day at day+1 (ultra) and day+3 (rapid). These analyses are intended to provide IWV retrieval with a low latency for short-term water vapour monitoring along the route of the vessel. These two routine analyses started from 14 March, after the change in location of the GNSS antenna on ship.
- One re-analysis of the raw data over the whole period (repro).
2.3. GNSS IWV Retrieval
- rapid analysis: surface pressure measurements from the ship-borne meteorological sensor were still used (Equation (3)) and extrapolated to GNSS antenna (Equation (4)); the weighted mean temperature was computed using global grid provided by TU Wien using a vertical extrapolation gradient of K km [17].
3. Comparison Dataset
3.1. ERA5
3.2. Ground-Launched Radiosonde
3.3. Ground GNSS Antenna
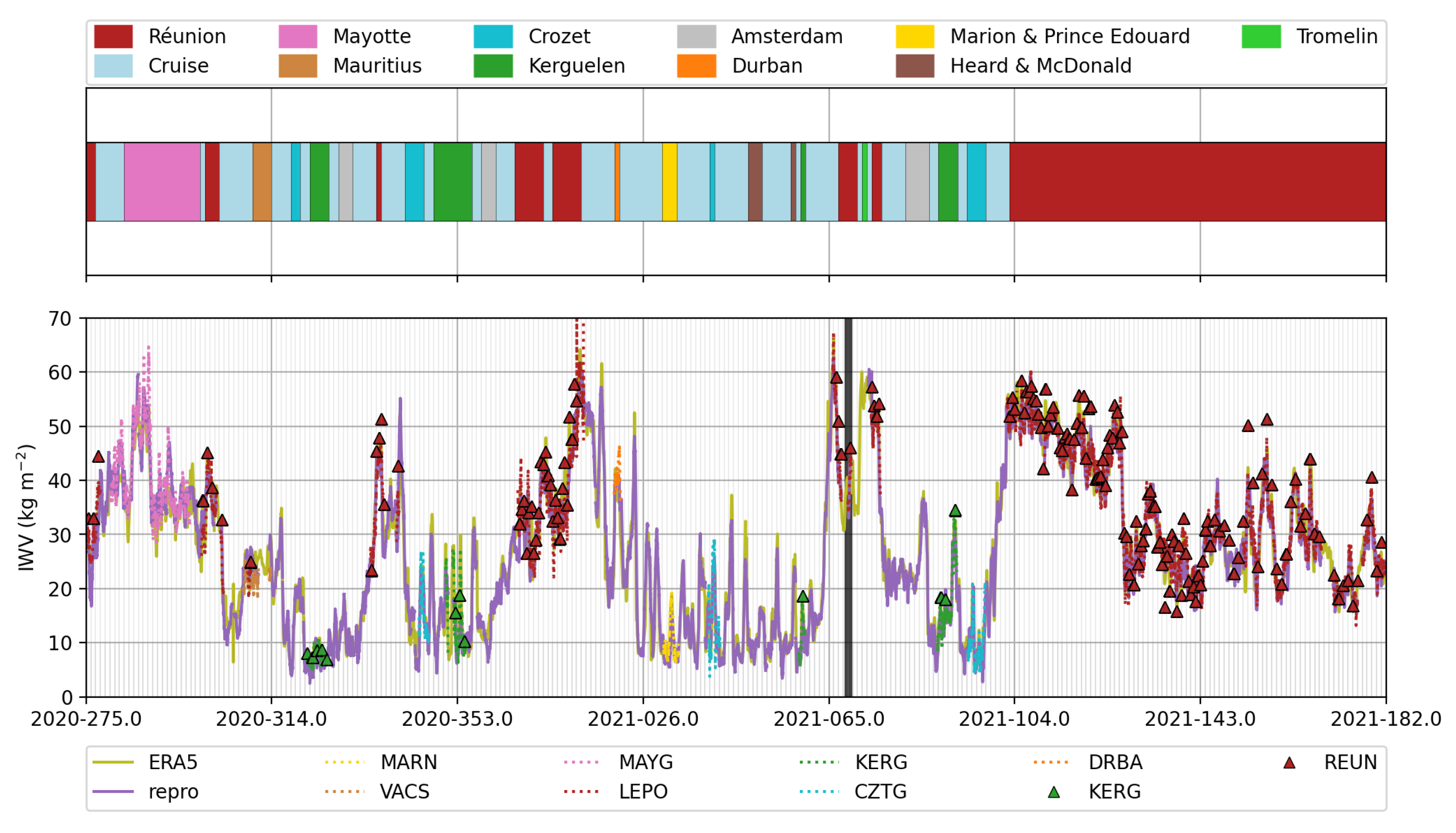
4. Assessment of GNSS IWV Retrieval
- The passage in the southern part of the Indian Ocean in February 2021 (days 30 to 60), with a succession of dry (<10 kg m) and wet (IWV kg m) periods.
- A very wet period in early January 2021 near Reunion (days 11–13 of 2021, peak IWV above 60 kg m), coinciding with the passage of tropical storm Danilo.
- A very wet period in early March 2021 between Reunion and Tromelin (around day 65 of 2021, IWV kg m), corresponding with the passage of tropical storm Iman.
- A long wet period when the Marion Dufresne was docked in Reunion during the last two weeks of April (around days 104 to 125, IWV around 50 kg m), corresponding to a very rainy sequence on the island, with a cumulative rainfall twice as high as the seasonal normal.
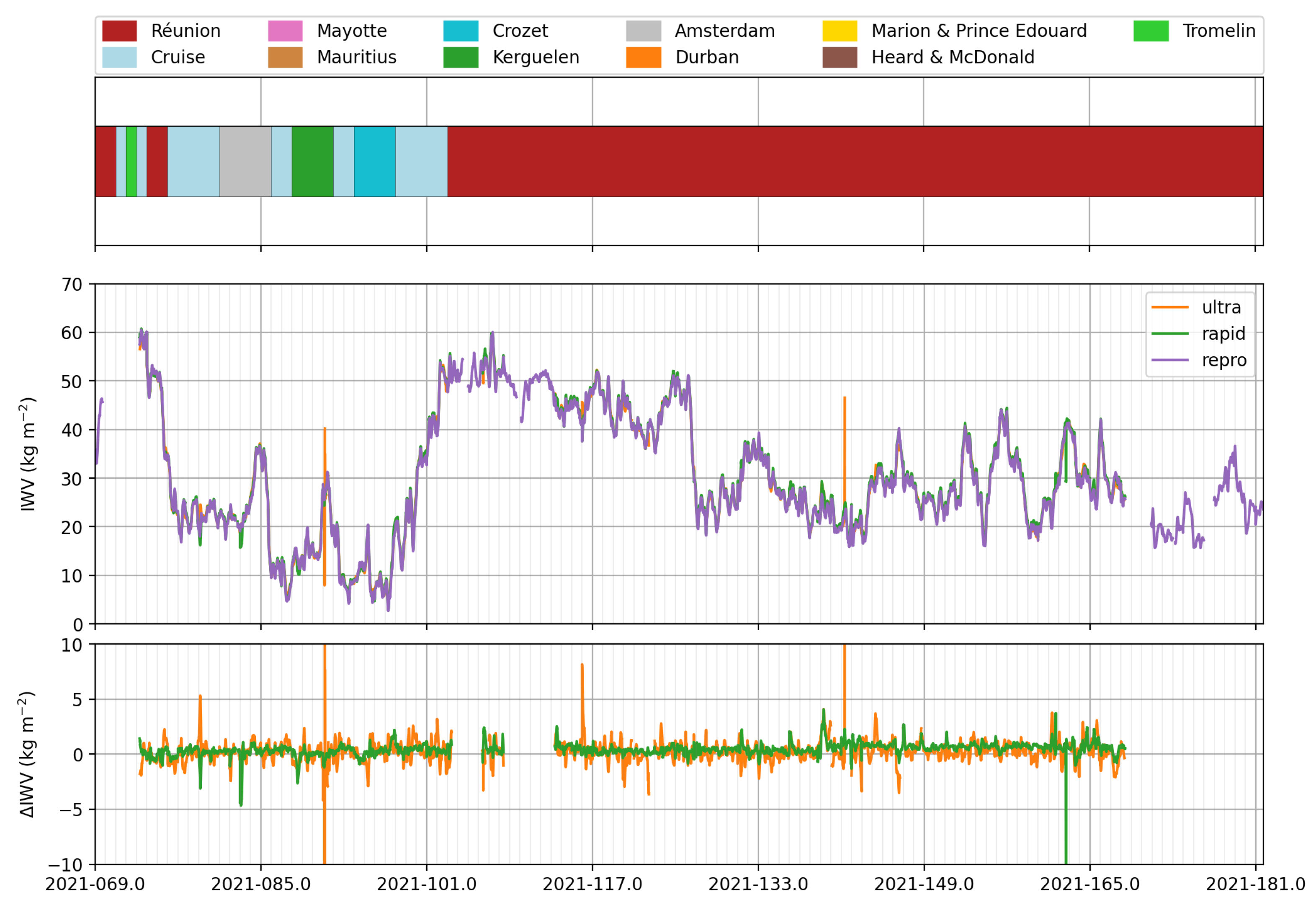
5. Operational Production of GNSS Derived IWV
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bengtsson, L. The global atmospheric water cycle. Environ. Res. Lett. 2010, 5, 025202. [Google Scholar] [CrossRef]
- Dessler, A.E.; Zhang, Z.; Yang, P. Water-vapor climate feedback inferred from climate fluctuations, 2003–2008. Geophys. Res. Lett. 2008, 35, L20704. [Google Scholar] [CrossRef] [Green Version]
- Corringham, T.W.; Martin Ralph, F.; Gershunov, A.; Cayan, D.R.; Talbot, C.A. Atmospheric rivers drive flood damages in the western United States. Sci. Adv. 2019, 5, eaax4631. [Google Scholar] [CrossRef] [Green Version]
- Binder, H.; Riviere, G.; Abrogast, P.; Maynard, K.; Bosser, P.; Joly, B.; Labadie, C. Dynamics of forecast error growth along cut-off Sanchez and its consequence for the prediction of a high-impact weather event over southern France. Q. J. R. Meteorol. Soc. 2021, 147, 3263–3285. [Google Scholar] [CrossRef]
- Ducrocq, V.; Braud, I.; Davolio, S.; Ferretti, R.; Flamant, C.; Jansa, A.; Kalthoff, N.; Richard, E.; Taupier-Letage, I.; Ayral, P.A.; et al. HyMeX-SOP1: The Field Campaign Dedicated to Heavy Precipitation and Flash Flooding in the Northwestern Mediterranean. Bull. Am. Meteorol. Soc. 2014, 95, 1083–1110. [Google Scholar] [CrossRef]
- Trenberth, K.E.; Smith, L.; Qian, T.; Dai, A.; Fasullo, J. Estimates of the Global Water Budget and Its Annual Cycle Using Observational and Model Data. J. Hydrometeorol. 2007, 8, 758–769. [Google Scholar] [CrossRef]
- Nuissier, O.; Ducrocq, V.; Ricard, D.; Lebeaupin, C.; Anquetin, S. A numerical study of three catastrophic precipitating events over southern France. I: Numerical framework and synoptic ingredients. Q. J. R. Meteorol. Soc. 2008, 134, 111–130. [Google Scholar] [CrossRef]
- Kato, T. Quasi-stationary Band-Shaped Precipitation Systems, Named “Senjo-Kousuitai”, Causing Localized Heavy Rainfall in Japan. J. Meteorol. Soc. Japan. Ser. II 2020, 98, 485–509. [Google Scholar] [CrossRef] [Green Version]
- Smith, S.R.; Alory, G.; Andersson, A.; Asher, W.; Baker, A.; Berry, D.I.; Drushka, K.; Figurskey, D.; Freeman, E.; Holthus, P.; et al. Ship-Based Contributions to Global Ocean, Weather, and Climate Observing Systems. Front. Mar. Sci. 2019, 6, 434. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.C.; Kaufman, Y.J. Water vapor retrievals using Moderate Resolution Imaging Spectroradiometer (MODIS) near-infrared channels. J. Geophys. Res. 2003, 108. [Google Scholar] [CrossRef]
- Mears, C.A.; Smith, D.K.; Ricciardulli, L.; Wang, J.; Huelsing, H.; Wentz, F.J. Construction and Uncertainty Estimation of a Satellite-Derived Total Precipitable Water Data Record Over the World’s Oceans. Earth Space Sci. 2018, 5, 197–210. [Google Scholar] [CrossRef] [Green Version]
- Yoneyama, K.; Zhang, C.; Long, C.N. Tracking Pulses of the Madden–Julian Oscillation. Bull. Am. Meteorol. Soc. 2013, 94, 1871–1891. [Google Scholar] [CrossRef]
- Guerova, G.; Jones, J.; Douša, J.; Dick, G.; de Haan, S.; Pottiaux, E.; Bock, O.; Pacione, R.; Elgered, G.; Vedel, H.; et al. Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe. Atmos. Meas. Tech. 2016, 9, 5385–5406. [Google Scholar] [CrossRef] [Green Version]
- Bevis, M.; Bussinger, S.; Herring, T.A.; Rocken, C.; Anthes, R.A.; Ware, R.H. GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System. J. Geophys. Res. 1992, 97, 15787–15801. [Google Scholar] [CrossRef]
- Haase, J.; Ge, M.; Vedel, H.; Calais, E. Accuracy and Variability of GPS Tropospheric Delay Measurements of Water Vapor in the Western Mediterranean. J. Appl. Meteorol. 2003, 42, 1547–1568. [Google Scholar] [CrossRef]
- Bock, O.; Bosser, P.; Bourcy, T.; David, L.; Goutail, F.; Hoareau, C.; Keckhut, P.; Legain, D.; Pazmino, A.; Pelon, J.; et al. Accuracy assessment of water vapour measurements from in situ and remote sensing techniques during the DEMEVAP 2011 campaign at OHP. Atmos. Meas. Tech. 2013, 6, 2777–2802. [Google Scholar] [CrossRef] [Green Version]
- Parracho, A.C.; Bock, O.; Bastin, S. Global IWV trends and variability in atmospheric reanalyses and GPS observations. Atmos. Chem. Phys. 2018, 18, 16213–16237. [Google Scholar] [CrossRef] [Green Version]
- Bock, O.; Parracho, A.C. Consistency and representativeness of integrated water vapour from ground-based GPS observations and ERA-Interim reanalysis. Atmos. Chem. Phys. 2019, 19, 9453–9468. [Google Scholar] [CrossRef] [Green Version]
- Lees, E.; Bousquet, O.; Leclair De Bellevue, J. Analysis of diurnal to seasonal variability of Integrated Water Vapour in the South Indian Ocean basin using ground-based GNSS and fifth-generation ECMWF reanalysis (ERA5) data. Q. J. R. Meteorol. Soc. 2020, 1–20. [Google Scholar] [CrossRef]
- Van Baelen, J.; Reverdy, M.; Tridon, F.; Labbouz, L.; Dick, G.; Bender, M.; Hagen, M. On the relationship between water vapour field evolution and the life cycle of precipitation systems. Q. J. R. Meteorol. Soc. 2011, 137, 204–223. [Google Scholar] [CrossRef] [Green Version]
- Bock, O.; Bosser, P.; Pacione, R.; Nuret, M.; Fourrié, N.; Parracho, A. A high-quality reprocessed ground-based GPS dataset for atmospheric process studies, radiosonde and model evaluation, and reanalysis of HyMeX Special Observing Period. Q. J. R. Meteorol. Soc. 2016, 142, 56–71. [Google Scholar] [CrossRef]
- Bock, O.; Bosser, P.; Flamant, C.; Doerflinger, E.; Jansen, F.; Fages, R.; Bony, S.; Schnitt, S. IWV observations in the Caribbean Arc from a network of ground-based GNSS receivers during EUREC4A. Earth Syst. Sci. Data 2021. [Google Scholar] [CrossRef]
- Bosser, P.; Bock, O. IWV retrieval from ground GNSS receivers during NAWDEX. Adv. Geosci. 2021, 55, 13–22. [Google Scholar] [CrossRef]
- Poli, P.; Moll, P.; Rabier, F.; Desroziers, G.; Chapnik, B.; Berre, L.; Healy, S.B.; Andersson, E.; El Guelai, F.Z. Forecast impact studies of zenith total delay data from European near real-time GPS stations in Météo-France 4DVAR. J. Geophys. Res. 2007, 112, D06114. [Google Scholar] [CrossRef]
- Bennitt, G.V.; Jupp, A. Operational Assimilation of GPS Zenith Total Delay Observations intothe Met Office Numerical Weather Prediction Models. Mon. Weather Rev. 2012, 140, 2706–2719. [Google Scholar] [CrossRef]
- Mahfouf, J.F.; Ahmed, F.; Moll, P.; Teferle, F.N. Assimilation of zenith total delays in the AROME France convective scale model: A recent assessment. Tellus A Dyn. Meteorol. Oceanogr. 2015, 67, 26106. [Google Scholar] [CrossRef]
- Chadwell, C.D.; Bock, Y. Direct estimation of absolute precipitable water in oceanic regions by GPS tracking of a coastal buoy. Geophys. Res. Lett. 2001, 28, 3701–3704. [Google Scholar] [CrossRef]
- Fujita, M.; Kimura, F.; Yoneyama, K.; Yoshizaki, M. Verification of precipitable water vapor etimated from shipborne GPS measurements. Geophys. Res. Lett. 2008, 35, L13803. [Google Scholar] [CrossRef]
- Adams, D.K.; Fernandes, R.M.S.; Maia, J.M.F. GNSS Precipitable Water Vapor from an Amazonian Rain Forest Flux Tower. J. Atmos. Ocean. Technol. 2011, 28, 1192–1198. [Google Scholar] [CrossRef]
- Boniface, K.; Champollion, C.; Chery, J.; Ducrocq, V.; Rocken, C.; Doerflinger, E.; Collard, P. Potential of shipborne GPS atmospheric delay data for prediction of Mediterranean intense weather events. Atmos. Sci. Lett. 2012, 13, 250–256. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Z.; Semmling, M.; Zus, F.; Gerland, S.; Ramatschi, M.; Ge, M.; Wickert, J.; Schuh, H. Retrieving Precipitable Water Vapor From Shipborne Multi-GNSS Observations. Geophys. Res. Lett. 2019, 46, 5000–5008. [Google Scholar] [CrossRef] [Green Version]
- Bosser, P.; Bock, O.; Flamant, C.; Bony, S.; Speich, S. Integrated water vapour content retrievals from ship-borne GNSS receivers during EUREC4A. Earth Syst. Sci. Data 2021, 13, 1499–1517. [Google Scholar] [CrossRef]
- Männel, B.; Zus, F.; Dick, G.; Glaser, S.; Semmling, M.; Balidakis, K.; Wickert, J.; Maturilli, M.; Dahlke, S.; Schuh, H. GNSS-based water vapor estimation and validation during the MOSAiC expedition. Atmos. Meas. Tech. 2021, 14, 5127–5138. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, Y.; Chen, G.; Wu, Z. Evaluation of HY-2A satellite-borne water vapor radiometer with shipborne GPS and GLONASS observations over the Indian Ocean. GPS Solut. 2019, 23, 23–87. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, Y.; Liu, Y.; Wang, J.; He, X.; Xu, W.; Ge, M.; Schuh, H. Validating HY-2A CMR precipitable water vapor using ground-based and shipborne GNSS observations. Atmos. Meas. Tech. 2020, 13, 4963–4972. [Google Scholar] [CrossRef]
- Ikuta, Y.; Seko, H.; Shoji, Y. Assimilation of shipborne precipitable water vapour by Global Navigation Satellite Systems for extreme precipitation events. Q. J. R. Meteorol. Soc. 2021, 148, 57–75. [Google Scholar] [CrossRef]
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Estey, L.; Meertens, C. TEQC: The Multi-Purpose Toolkit for GPS/GLONASS Data. GPS Solut. 1999, 3, 42–49. [Google Scholar] [CrossRef]
- Shoji, Y.; Sato, K.; Yabuki, M.; Tsuda, T. Comparison of shipborne GNSS-derived precipitable water vapor with radiosonde in the western North Pacific and in the seas adjacent to Japan. Earth Planets Space 2017, 69, 153. [Google Scholar] [CrossRef]
- Bertiger, W.; Desai, S.D.; Haines, B.; Harvey, N.; Moore, A.W.; Owen, S.; Weiss, J.P. Single receiver phase ambiguity resolution with GPS data. J. Geod. 2010, 84, 327–337. [Google Scholar] [CrossRef]
- Boehm, J.; Heinkelmann, R.; Schuh, H. Short Note: A global model of pressure and temperature for geodetic applications. J. Geod. 2007, 81, 679–683. [Google Scholar] [CrossRef]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. 2006, 11, B02406. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.E.; Tregoning, P.; Schuh, H. The Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef] [Green Version]
- Adams, D.K.; Gutman, S.I.; Holub, K.L.; Pereira, D.S. GNSS observations of deep convective time scales in the Amazon. Geophys. Res. Lett. 2013, 40, 2818–2823. [Google Scholar] [CrossRef]
- Davis, J.L.; Herring, T.A.; Shapiro, I.I.; Rogers, A.E.E.; Elgered, G. Geodesy by radio interferometry: Effects of atmospheric modeling errors on estimates of baseline length. Radio Sci. 1985, 20, 1593–1607. [Google Scholar] [CrossRef]
- Bosser, P.; Bock, O.; Pelon, J.; Thom, C. An improved mean gravity model for GPS hydrostatic delay calibration. Geosci. Remote Sens. Lett. 2007, 4, 3–7. [Google Scholar] [CrossRef]
- Steigenberger, P.; Boehm, J.; Tesmer, V. Comparison of GMF/GPT with VMF1/ECMWF and implications for atmospheric loading. J. Geod. 2009, 83, 943–951. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Hirahara, S.; Horányi, A.; Muñoz-Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Schepers, D.; et al. The ERA5 global reanalysis. Q. J. R. Meteorol. Soc. 2020, 146, 1999–2049. [Google Scholar] [CrossRef]
- Wu, Z.; Lu, C.; Zheng, Y.; Liu, Y.; Liu, Y.; Xu, W.; Jin, K.; Tang, Q. Evaluation of Shipborne GNSS Precipitable Water Vapor Over Global Oceans From 2014 to 2018. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–15. [Google Scholar] [CrossRef]
- Bock, O.; Keil, C.; Richard, E.; Flamant, C.; Bouin, M.N. Validation of precipitable water from ECMWF model analyses with GPS and radiosonde data during the MAP SOP. Q. J. R. Meteorol. Soc. 2005, 131, 3013–3036. [Google Scholar] [CrossRef]
- Dupont, J.C.; Haeffelin, M.; Badosa, J.; Clain, G.; Raux, C.; Vignelles, D. Characterization and Corrections of Relative Humidity Measurement from Meteomodem M10 Radiosondes at Midlatitude Stations. J. Atmos. Ocean. Technol. 2020, 37, 857–871. [Google Scholar] [CrossRef] [Green Version]
- Tetens, O. Über einige meteorologische Begriff. Zeitschrift für Geophys. 1930, 6, 297–309. [Google Scholar]
- Bock, O.; Bouin, M.N.; Doerflinger, E.; Collard, P.; Masson, F.; Meynadier, R.; Nahmani, S.; Koité, M.; Gaptia Lawan Balawan, K.; Didé, F.; et al. West African Monsoon observed with ground-based GPS receivers during African Monsoon Multidisciplinary Analysis (AMMA). J. Geophys. Res. 2008, 113, 21005. [Google Scholar] [CrossRef] [Green Version]
- Sohn, D.Y.; Choi, B.K.; Park, Y.; Kim, Y.C.; Ku, B. Precipitable Water Vapor Retrieval from Shipborne GNSS Observations on the Korean Research Vessel ISABU. Sensors 2020, 20, 4261. [Google Scholar] [CrossRef] [PubMed]
- Offiler, D. EIG EUMETNET GNSS Vater Vapour Program: Products Requirements Document Version 1.0.; Technical Report; EUMETNET: Brussels, Belgium, 2010. [Google Scholar]
- Gong, Y.; Liu, Z.; Foster, J.H. Evaluating the Accuracy of Satellite-Based Microwave Radiometer PWV Products Using Shipborne GNSS Observations Across the Pacific Ocean. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Bousquet, O.; Lees, E.; Durand, J.; Peltier, A.; Duret, A.; Mekies, D.; Boissier, P.; Donal, T.; Fleischer-Dogley, F.; Zakariasy, L. Densification of the Ground-Based GNSS Observation Network in the Southwest Indian Ocean: Current Status, Perspectives, and Examples of Applications in Meteorology and Geodesy. Front. Earth Sci. 2020, 8, 566105. [Google Scholar] [CrossRef]
- Bousquet, O.; Barruol, G.; Cordier, E.; Barthe, C.; Bielli, S.; Calmer, R.; Rindraharisaona, E.; Roberts, G.; Tulet, P.; Amelie, V.; et al. Impact of Tropical Cyclones on Inhabited Areas of the SWIO Basin at Present and Future Horizons. Part 1: Overview and Observing Component of the Research Project RENOVRISK-CYCLONE. Atmosphere 2021, 12, 544. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ultra | rapid | repro | |
|---|---|---|---|
| Elevation cut-off angle | 3 | ||
| Data weighting | 1 cm / | ||
| Ambiguity resolution | Yes | ||
| Orbits and clocks (sampling) | ultra-rapid (300 s) | rapid (30 s) | final (30 s) |
| Ionosphere model | Iono-free | Iono-free | Iono-free |
| 2nd order | |||
| Troposphere model | GPT | GPT | VMF1 |
| GMF | GMF | VMF1 | |
| (mm) | (mm) | |||
|---|---|---|---|---|
| ultra | 0.1–1000 | 0.1–6.5 | 24,054 | 3.9 |
| rapid | 0.1–1000 | 0.1–3.0 | 249,734 | 0.2 |
| repro | 0.1–1000 | 0.1–3.0 | 729,868 | 1.9 |
| repro | 0.1–1000 | 0.1–3.0 | 298,871 | 0.4 |
| rms | d | ||||||
|---|---|---|---|---|---|---|---|
| ERA5 | 6055 | 26.6 | +0.21 ± 2.78 | 2.79 | +0.98 | - | - |
| ERA5 | 2490 | 30.4 | +0.45 ± 2.45 | 2.49 | +0.98 | - | - |
| CORS | |||||||
| CZTG | 1800 | +12.6 | −0.08 ± 2.69 | 2.70 | +0.90 | 9.5 | 120 |
| KERG | 3168 | +12.0 | +1.13 ± 2.47 | 2.71 | +0.92 | 6.6 | 3 |
| MARN | 453 | +10.7 | +2.64 ± 2.50 | 3.63 | +0.80 | 27.9 | −12 |
| LEPO | 26,750 | +34.5 | +0.47 ± 2.15 | 2.21 | +0.98 | 3.7 | −13 |
| MAYG | 3922 | +41.2 | +0.35 ± 3.49 | 3.51 | +0.88 | 23.1 | −21 |
| DRBA | 65 | +39.3 | +0.66 ± 1.12 | 1.30 | −0.43 | 21.3 | 7 |
| VACS | 573 | +23.1 | −2.30 ± 2.10 | 3.11 | +0.29 | 26.3 | 398 |
| CZTG | 933 | +9.2 | −0.00 ± 2.84 | 2.84 | +0.71 | 4.5 | 115 |
| KERG | 1055 | +17.4 | +0.31 ± 1.56 | 1.59 | +0.97 | 5.0 | −2 |
| LEPO | 20,485 | +34.0 | +0.60 ± 1.74 | 1.84 | +0.99 | 3.3 | −15 |
| Radiosondes | |||||||
| REUN | 153 | +36.9 | +2.54 ± 3.45 | 4.29 | +0.96 | 26.3 | 11 |
| KERG | 11 | +13.9 | +2.36 ± 2.70 | 3.59 | +0.94 | 5.0 | 0 |
| REUN | 116 | +36.1 | +2.28 ± 3.30 | 4.01 | +0.97 | 25.9 | 9 |
| rms | |||||
|---|---|---|---|---|---|
| ultra | 24,022 | +29.3 | +0.24 ± 1.00 | 1.03 | +1.00 |
| rapid | 249,481 | +29.5 | +0.43 ± 0.59 | 0.73 | +1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bosser, P.; Van Baelen, J.; Bousquet, O. Routine Measurement of Water Vapour Using GNSS in the Framework of the Map-Io Project. Atmosphere 2022, 13, 903. https://doi.org/10.3390/atmos13060903
Bosser P, Van Baelen J, Bousquet O. Routine Measurement of Water Vapour Using GNSS in the Framework of the Map-Io Project. Atmosphere. 2022; 13(6):903. https://doi.org/10.3390/atmos13060903
Chicago/Turabian StyleBosser, Pierre, Joël Van Baelen, and Olivier Bousquet. 2022. "Routine Measurement of Water Vapour Using GNSS in the Framework of the Map-Io Project" Atmosphere 13, no. 6: 903. https://doi.org/10.3390/atmos13060903