
Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike


Abstract
:1. Introduction
2. Modeling of Bi-Polar Discharge from Aircraft
2.1. Modeling of Positive Leader Discharge
- Adding up ambient potential and reaction potential due to induced charges on aircraft, total potential distribution ( in Figure 2) is obtained.
- A straight line with a slope of 450 kV/m is considered as streamer section (such as in Figure 2). Streamer charge is computed from the area between background potential distribution and modified potential distribution (Equation (1)) [30,31].where x is the distance along the discharge axis. is the geometrical factor whose value is taken as C/V·m.
- If , positive discharge starts with an initial length of 5 cm. The corresponding potential drop along the leader length is calculated using Rizk’s equation [31],where is the leader length at step, is gradient of positive streamer, kV/m is the final quasi-stationary leader gradient, and m is the time constant.
- In subsequent steps, the incremental streamer charge () is again calculated from the area between two consecutive potential distributions. Subsequently, the incremental leader length is evaluated.where is the potential distribution at instant in presence of leader and streamer both (Figure 2). = 65 C/m, is the charge per unit length of positive leader [31].
- The modified leader length at instant is calculated as .
2.2. Modeling of Negative Leader Discharge
- If 0.8 C [19], the pilot system starts from the boundary of the negative streamer followed by inception of space leaders.
- Space leaders are represented with horizontal lines (zero leader gradient [40]) in Figure 4. Corresponding space streamer charges ( and ) are computed from the area between the potential distributions as shown in Equation (6). Subsequently, the incremental space leader lengths ( and ) are calculated from the incremental space streamer charges (Equation (6)).where is the potentil distribution along discharge axis at instant. = 53.1 C/m, = 166.7 C/m [40] are the charge per unit length for positive and negative space leaders respectively.
- The space leader length are update by adding the incremental leader lengths.
- When the positive space leader tip reaches the primary negative leader i.e., (Figure 4) the length of the negative leader jumps suddenly, and a stepping process is completed. The corresponding negative leader length is calculated as,
- Again, these steps are followed for new extension of main negative leader.
2.3. Electric Field Computation
2.3.1. Salient Features of Bi-Polar Leader Discharge from Aircraft
2.3.2. Accurate Evaluation of Local Field Using Sub-Modeling
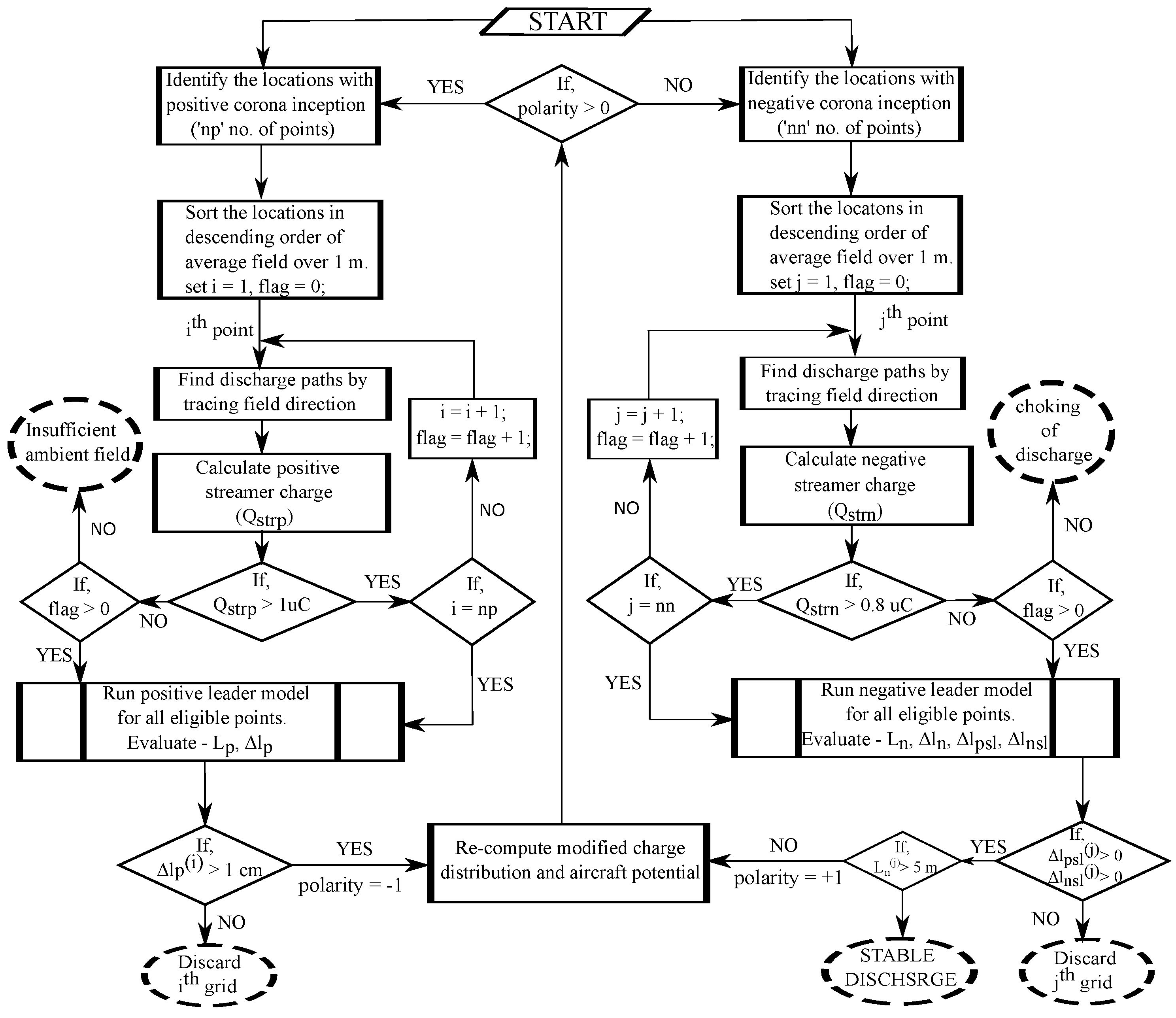
2.4. Steps Involved in Simulation
- From the locations of leader inception, discharge paths are determined by tracing the direction of the electric field. Initial leader extensions are considered along the corresponding discharge axis.
- Modified potential distribution is computed, including the newly formed connecting leader segments (Section 2.3).
- Subsequently, at the locations of leader inception, corresponding incremental positive and negative leader lengths are obtained.
- If, at any location, the incremental leader length decreases in a few consecutive steps and becomes less than , it is considered an unsuccessful leader inception. Further computation at that location is terminated.
- For the other locations where significant leader increment is obtained, steps 3, 4, and 5 are performed until a stable bi-polar discharge from the aircraft gets established.
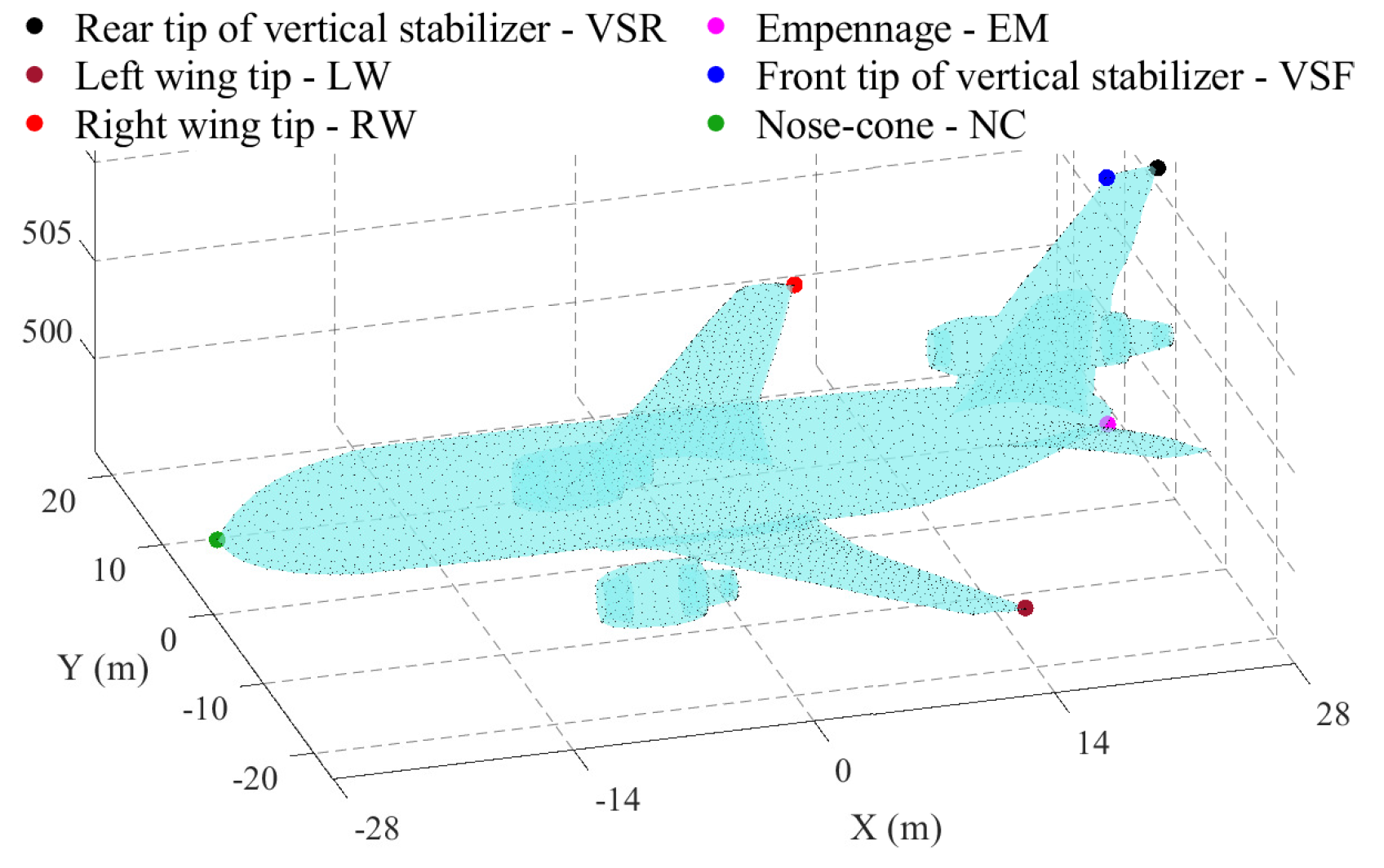
3. Simulation Results for DC-10 Aircraft
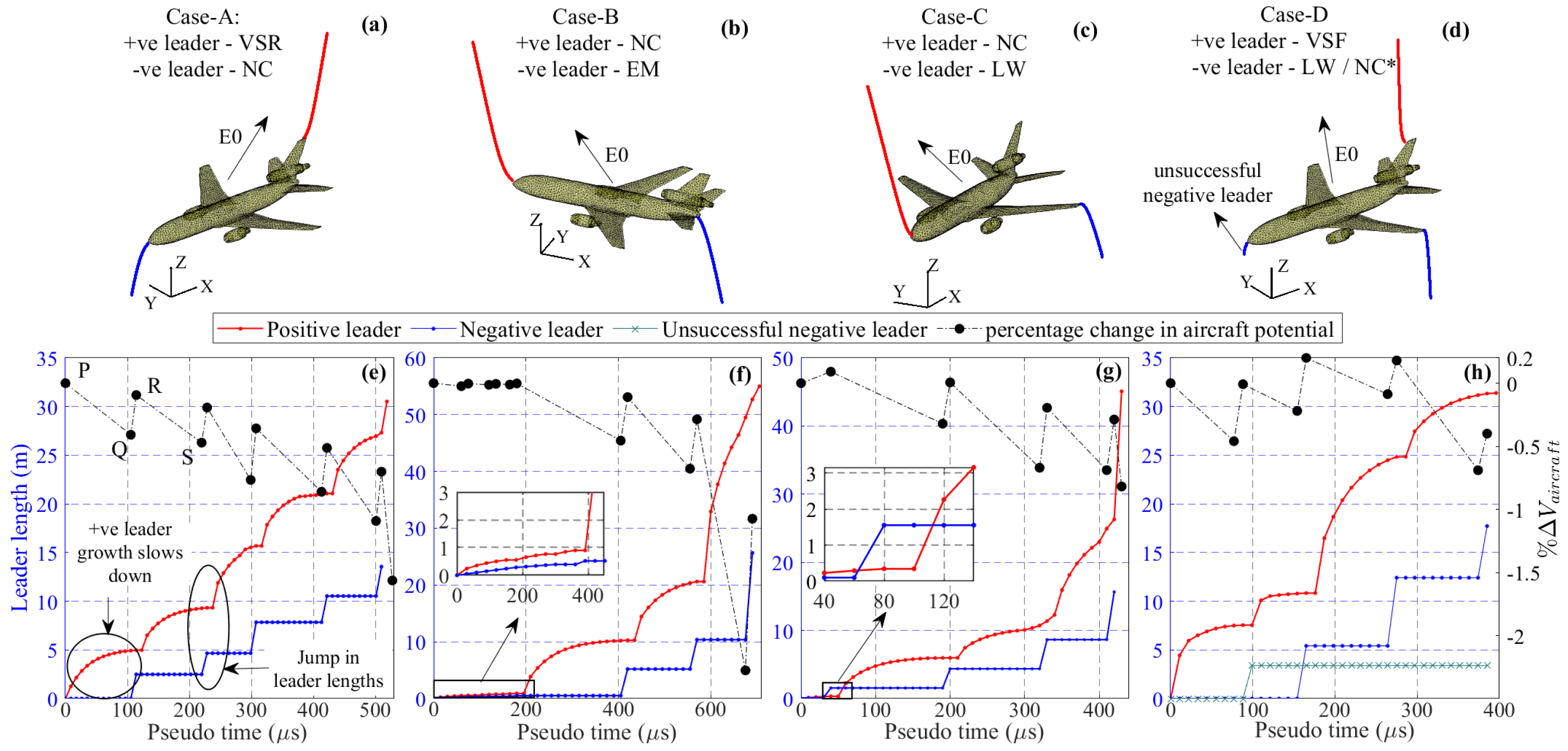
Analysis of Propagation of Connecting Leaders
4. Ambient Electric Field Required for Stable Bi-Polar Discharge from Aircraft
5. Discussion
5.1. Atmospheric Conditions
5.2. Aircraft Speed
6. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fisher, F.A.; Plumer, J.A. Lightning Protection for Aircraft; National Aeronautics and Space Administration, Scientific and Technical Information Office: Huntsville, AL, USA, 1980.
- Golding, W.L. Lightning strikes on commercial aircraft: How the airlines are coping. J. Aviat. Educ. Res. 2005, 15, 7. [Google Scholar] [CrossRef]
- Lalande, P.; Bondiou-Clergerie, A.; Laroche, P. Analysis of Available In-Flight Measurements of Lightning Strikes to Aircraft; Technical Report; SAE Technical Paper; International Conference on Lightning and Static Electric: Onera, France, 1999. [Google Scholar]
- Fisher, B.; Plumer, J. Lightning attachment patterns and flight conditions experienced by the NASA F-106B airplane from 1980 to 1983. In Proceedings of the 22nd Aerospace Sciences Meeting, Reno, NV, USA, 9–12 January 1984; p. 466. [Google Scholar]
- Thomas, M. Direct strike lightning measurement system. In Proceedings of the 1st Flight Test Conference, Tokyo, Japan, 12–14 January 1981; p. 2513. [Google Scholar]
- Pitts, F.L. Electromagnetic measurement of lightning strikes to aircraft. J. Aircr. 1982, 19, 246–250. [Google Scholar] [CrossRef]
- Burket, H.D.; Walko, L.C.; Reazer, J.S.; Serrano, A.V. In-Flight Lightning Characterization Program on a CV-580 Aircraft; Technical Report, Report No. AFWAL-TR-88-3024; Air Force Wright Aeronautical Labs Wright-Patterson Afb Oh Flight Dynamics Lab: Wright-Patterson, OH, USA, 1988.
- Rustan, P., Jr. The lightning threat to aerospace vehicles. J. Aircr. 1986, 23, 62–67. [Google Scholar] [CrossRef]
- Laroche, P.; Dill, M.; Gayet, J.; Friedlander, M. In-flight thunderstorm environmental measurements during the Landes 84 campaign. Onera TP 1985, 1985, 9. [Google Scholar]
- Moreau, J.P.; Alliot, J.C.; Mazur, V. Aircraft lightning initiation and interception from in situ electric measurements and fast video observations. J. Geophys. Res. Atmos. 1992, 97, 15903–15912. [Google Scholar] [CrossRef]
- Buguet, M.; Lalande, P.; Laroche, P.; Blanchet, P.; Bouchard, A.; Chazottes, A. Thundercloud electrostatic field measurements during the inflight EXAEDRE campaign and during lightning strike to the aircraft. Atmosphere 2021, 12, 1645. [Google Scholar] [CrossRef]
- Mazur, V. A physical model of lightning initiation on aircraft in thunderstorms. J. Geophys. Res. Atmos. 1989, 94, 3326–3340. [Google Scholar] [CrossRef]
- Group, S.I. Aircraft Lightning Zoning, ARP 5414. In Aerospace Recommended Practice; Revision A; SAE: Warrendale, PA, USA, 1999. [Google Scholar]
- Jones, C. The Rolling Sphere As a Maximum Stress Predictor for Lightning Attachment and Current Transfer; International Aerospace and Ground Conference on lightning and Statis Electricity: Bath, UK, 1989. [Google Scholar]
- Lee, R.H. Protection zone for buildings against lighning strokes using transmission line protection practice. IEEE Trans. Ind. Appl. 1978, 6, 465–469. [Google Scholar] [CrossRef]
- Armstrong, H.; Whitehead, E.R. Field and analytical studies of transmission line shielding. IEEE Trans. Power Appar. Syst. 1968, 1, 270–281. [Google Scholar] [CrossRef]
- Lalande, P.; Delannoy, A. Numerical Methods for Zoning Computation; AerospaceLab: Mont-Saint-Guibert, Belgium, 2012; pp. 1–10. [Google Scholar]
- Rizk, F.A. Effect of floating conducting objects on critical switching impulse breakdown of air insulation. IEEE Trans. Power Deliv. 1995, 10, 1360–1370. [Google Scholar] [CrossRef]
- Castellani, A.; Bondiou-Clergerie, A.; Lalande, P.; Bonamy, A.; Gallimberti, I. Laboratory study of the bi-leader process from an electrically floating conductor. I. General results. IEE Proc.-Sci. Meas. Technol. 1998, 145, 185–192. [Google Scholar] [CrossRef]
- Castellani, A.; Bondiou-Clergerie, A.; Lalande, P.; Bonamy, A.; Gallimberti, I. Laboratory study of the bi-leader process from an electrically floating conductor. Part 2: Bi-leader properties. IEE Proc.-Sci. Meas. Technol. 1998, 145, 193–199. [Google Scholar] [CrossRef]
- Gao, J.; Wang, L.; Wu, S.; Xie, C.; Tan, Q.; Ma, G.; Tueraili, H.; Song, B. Effect of a floating conductor on discharge characteristics of a long air gap under switching impulse. J. Electrost. 2021, 114, 103629. [Google Scholar] [CrossRef]
- Gallimberti, I. The mechanism of the long spark formation. J. Phys. Colloq. 1979, 40, C7-193–C7-250. [Google Scholar] [CrossRef]
- Hutzler, B.; Hutzler-Barre, D. Leader propagation model for predetermination of switching surge flashover voltage of large air gaps. IEEE Trans. Power Appar. Syst. 1978, 4, 1087–1096. [Google Scholar] [CrossRef]
- Carrara, G.; Thione, L. Switching surge strength of large air gaps: A physical approach. IEEE Trans. Power Appar. Syst. 1976, 95, 512–524. [Google Scholar] [CrossRef]
- Dellera, L.; Garbagnati, E. Lightning stroke simulation by means of the leader progression model. I. Description of the model and evaluation of exposure of free-standing structures. IEEE Trans. Power Deliv. 1990, 5, 2009–2022. [Google Scholar] [CrossRef]
- Petrov, N.; Waters, R. Determination of the striking distance of lightning to earthed structures. Proc. R. Soc. London. Ser. Math. Phys. Sci. 1995, 450, 589–601. [Google Scholar]
- Kumar, U.; Bokka, P.K.; Padhi, J. A macroscopic inception criterion for the upward leaders of natural lightning. IEEE Trans. Power Deliv. 2005, 20, 904–911. [Google Scholar] [CrossRef] [Green Version]
- Rizk, F.A. Modeling of lightning incidence to tall structures. I. Theory. IEEE Trans. Power Deliv. 1994, 9, 162–171. [Google Scholar] [CrossRef]
- Rizk, F.A. Modeling of lightning incidence to tall structures. II. Application. IEEE Trans. Power Deliv. 1994, 9, 172–193. [Google Scholar] [CrossRef]
- Goelian, N.; Lalande, P.; Bondiou-Clergerie, A.; Bacchiega, G.; Gazzani, A.; Gallimberti, I. A simplified model for the simulation of positive-spark development in long air gaps. J. Phys. Appl. Phys. 1997, 30, 2441. [Google Scholar] [CrossRef]
- Becerra, M.; Cooray, V. A simplified physical model to determine the lightning upward connecting leader inception. IEEE Trans. Power Deliv. 2006, 21, 897–908. [Google Scholar] [CrossRef]
- Becerra, M.; Cooray, V. Time dependent evaluation of the lightning upward connecting leader inception. J. Phys. Appl. Phys. 2006, 39, 4695. [Google Scholar] [CrossRef]
- Becerra, M.; Cooray, V.; Hartono, Z. Identification of lightning vulnerability points on complex grounded structures. J. Electrost. 2007, 65, 562–570. [Google Scholar] [CrossRef] [Green Version]
- Becerra, M.; Cooray, V.; Roman, F. Lightning striking distance of complex structures. IET Gener. Transm. Distrib. 2008, 2, 131–138. [Google Scholar] [CrossRef]
- LR Group. Negative discharges in long air gaps at Les Renardières. 1978 results. Electra 1981, 40, 67–216. [Google Scholar]
- Gallimberti, I.; Bacchiega, G.; Bondiou-Clergerie, A.; Lalande, P. Fundamental processes in long air gap discharges. Comptes Rendus Phys. 2002, 3, 1335–1359. [Google Scholar] [CrossRef]
- Mazur, V.; Ruhnke, L.; Bondiou-Clergerie, A.; Lalande, P. Computer simulation of a downward negative stepped leader and its interaction with a ground structure. J. Geophys. Res. Atmos. 2000, 105, 22361–22369. [Google Scholar] [CrossRef]
- Arevalo, L.; Cooray, V. Preliminary study on the modelling of negative leader discharges. J. Phys. Appl. Phys. 2011, 44, 315204. [Google Scholar] [CrossRef]
- Beroual, A.; Rakotonandrasana, J.; Fofana, I. Modelling of the negative lightning discharge with an equivalent electrical network. In IXth SIPDA; HAL Open Science: Foz de Iguacu, Brazil, 2007; pp. 1–7. [Google Scholar]
- Guo, Z.; Li, Q.; Bretas, A.; Rakov, V.A. A simplified physical model of negative leader in long sparks. Electr. Power Syst. Res. 2019, 176, 105955. [Google Scholar] [CrossRef]
- Harrington, R.F. Field Computation by Moment Methods; Wiley-IEEE Press: Hoboken, NJ, USA, 1993. [Google Scholar]
- Misaki, T.; Tsuboi, H.; Itaka, K.; Hara, T. Computation of three-dimensional electric field problems by a surface charge method and its application to optimum insulator design. IEEE Trans. Power Appar. Syst. 1982, 3, 627–634. [Google Scholar] [CrossRef]
- Chatterjee, S. Dimensioning Of Corona Control Rings For EHV/UHV Line Hardware And Substations. Ph.D. Thesis, IISc, Bangalore, India, 2015. [Google Scholar]
- Grabcad Free 3D Models. Available online: http://https://grabcad.com/library/mcdonnell-douglas-dc10-martinair-1 (accessed on 30 August 2021).
- Singer, H.; Steinbigler, H.; Weiss, P. A charge simulation method for the calculation of high voltage fields. IEEE Trans. Power Appar. Syst. 1974, 5, 1660–1668. [Google Scholar] [CrossRef] [Green Version]
- Lalande, P.; Bondiou-Clergerie, A.; Laroche, P. Analysis of Available In-Flight Strikes to Aircraft; Technical Report; SAE Technical Paper; SAE: Onera, France, 1999. [Google Scholar]
- Bazelyan, E.; Aleksandrov, N.; Raizer, Y.P.; Konchakov, A. The effect of air density on atmospheric electric fields required for lightning initiation from a long airborne object. Atmos. Res. 2007, 86, 126–138. [Google Scholar] [CrossRef] [Green Version]
- Allen, N.; Ghaffar, A. The variation with temperature of positive streamer properties in air. J. Phys. Appl. Phys. 1995, 28, 338. [Google Scholar] [CrossRef]
- Hui, J.; Guan, Z.; Wang, L.; Li, Q. Variation of the dynamics of positive streamer with pressure and humidity in air. IEEE Trans. Dielectr. Electr. Insul. 2008, 15, 382–389. [Google Scholar]
- Cavcar, M. The International Standard Atmosphere (ISA); Anadolu University: Eskisehir, Turkey, 2000; Volume 30, pp. 1–6. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Locations of Leader Inceptions | Components of (kV/m) | (kV/m) | (MV) | |||
|---|---|---|---|---|---|---|---|
| A. | VSR | NC | 22.6 | 0 | 82.5 | 85.6 | 2.37 |
| B. | NC | EM | −52 | 0 | 94.4 | 108 | 2.34 |
| C. | NC | LW | −37 | 37 | 110 | 122 | 2.33 |
| D. | VSF | LW/NC * | 0 | 18 | 133 | 134 | 2.3 |
| E. | RW | LW | 0 | 55 | 101 | 115 | 2.38 |
| Pitch Angle (Degree) | Locations of Leader Inceptions and Direction of Ambient Field | (kV/m) | (MV) | |
|---|---|---|---|---|
| Landing | 2 | Same as Case-A | 79 | 2.55 |
| 5 | 70 | 2.57 | ||
| 8 | 67.5 | 2.61 | ||
| Take-off | 5 | Same as Case-B | 83.6 | 2.59 |
| 10 | 70 | 2.83 | ||
| 15 | 62.3 | 3.05 |
| References | Aircraft | Length (m) | Wingspan (m) | No. of Events | Altitude (km) | (kV/m) | (kV/m) |
|---|---|---|---|---|---|---|---|
| [7,8,10,12] | CV580 | 22.76 | 28 | 33 | ≤6 | 25–87 | 32–172 |
| [9,10,12] | C160 | 32.4 | 40 | 16 | 4.2–4.6 | 44–75 | 77–131 |
| [11] | Falcon 20 | 17 | 16.2 | 1 | 8.4 | 80 | 194 |
| Cruising Altitude (m) | Relative Air Density | (kV/m) | (kV/m) | (kV/m) |
|---|---|---|---|---|
| 0 | 1 | 450 | 750 | 85.6 |
| 500 | 0.95 | 419 | 698 | 83.3 |
| 1000 | 0.9 | 397 | 661 | 77.4 |
| 2000 | 0.82 | 355 | 592 | 69.8 |
| 4000 | 0.67 | 281 | 469 | 61 |
| 6000 | 0.54 | 220 | 367 | 51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Das, S.; Kumar, U. Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike. Atmosphere 2022, 13, 943. https://doi.org/10.3390/atmos13060943
Das S, Kumar U. Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike. Atmosphere. 2022; 13(6):943. https://doi.org/10.3390/atmos13060943
Chicago/Turabian StyleDas, Sayantan, and Udaya Kumar. 2022. "Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike" Atmosphere 13, no. 6: 943. https://doi.org/10.3390/atmos13060943
APA StyleDas, S., & Kumar, U. (2022). Modeling of Bi-Polar Leader Inception and Propagation from Flying Aircraft Prior to a Lightning Strike. Atmosphere, 13(6), 943. https://doi.org/10.3390/atmos13060943