
Analysis of TRWP Particle Distribution in Urban and Suburban Landscapes, Connecting Real Road Measurements with Particle Distribution Simulation


 ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
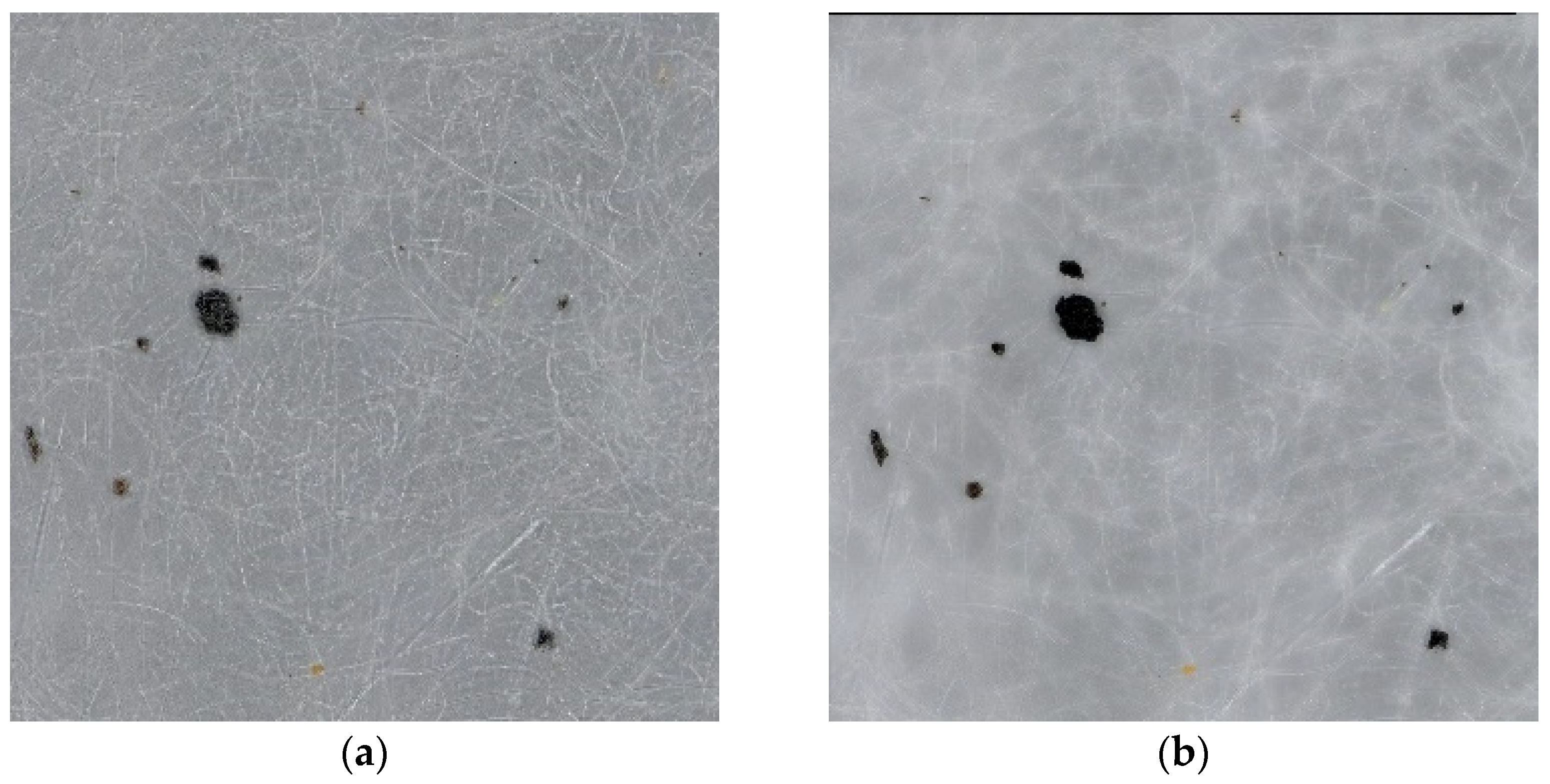
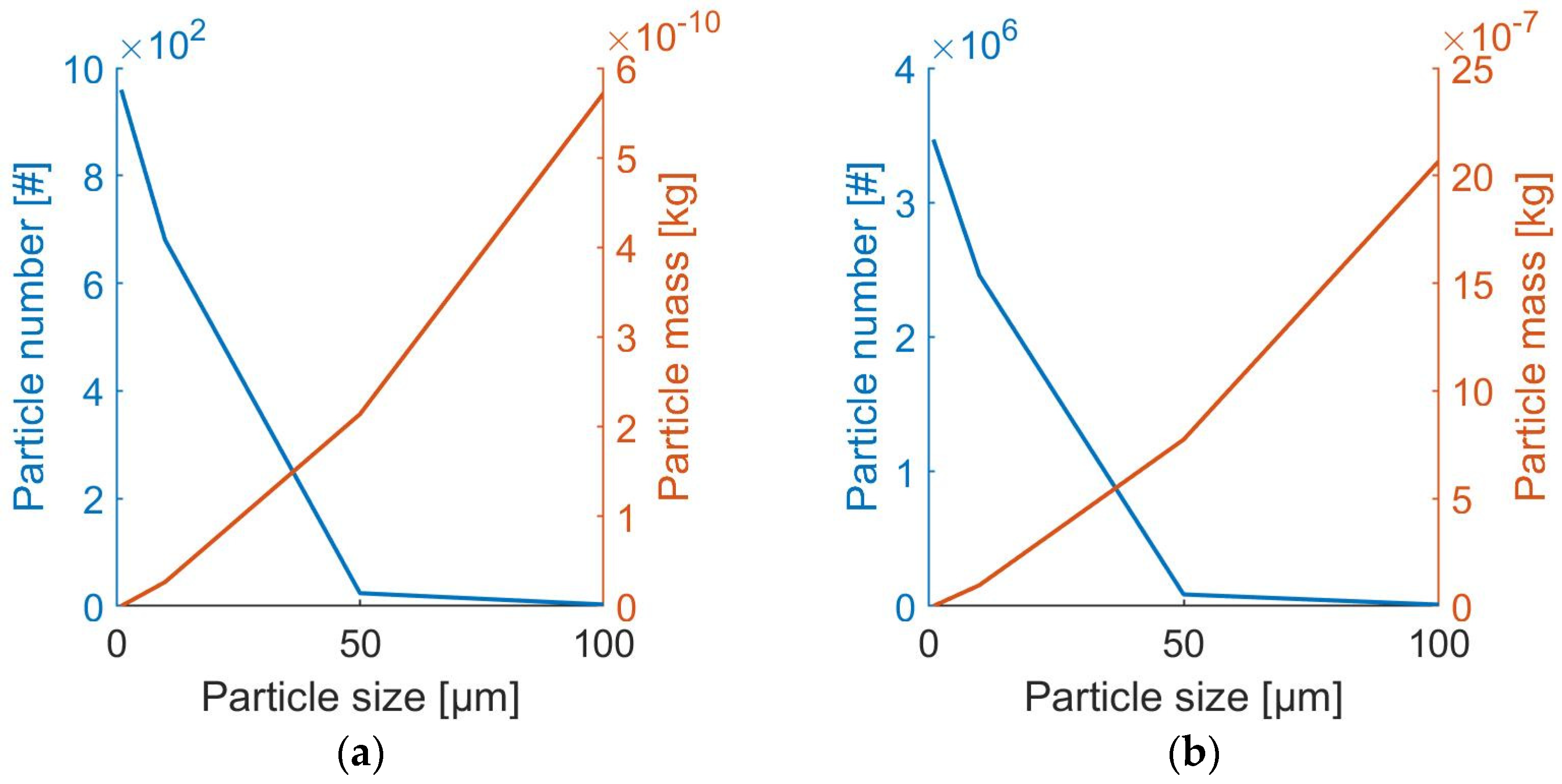
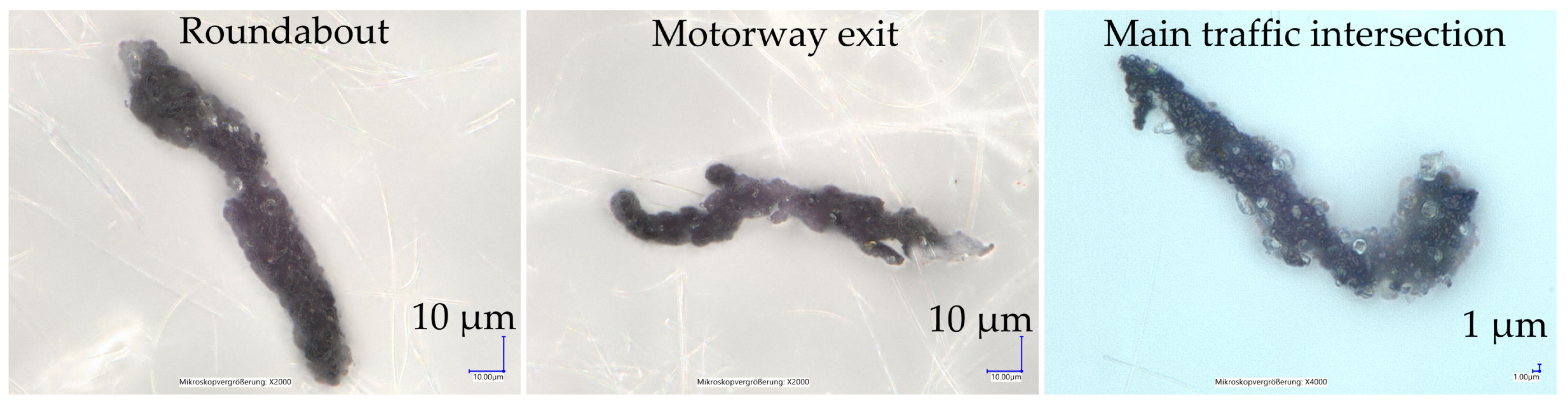
2.1. Particle Sample Analysis
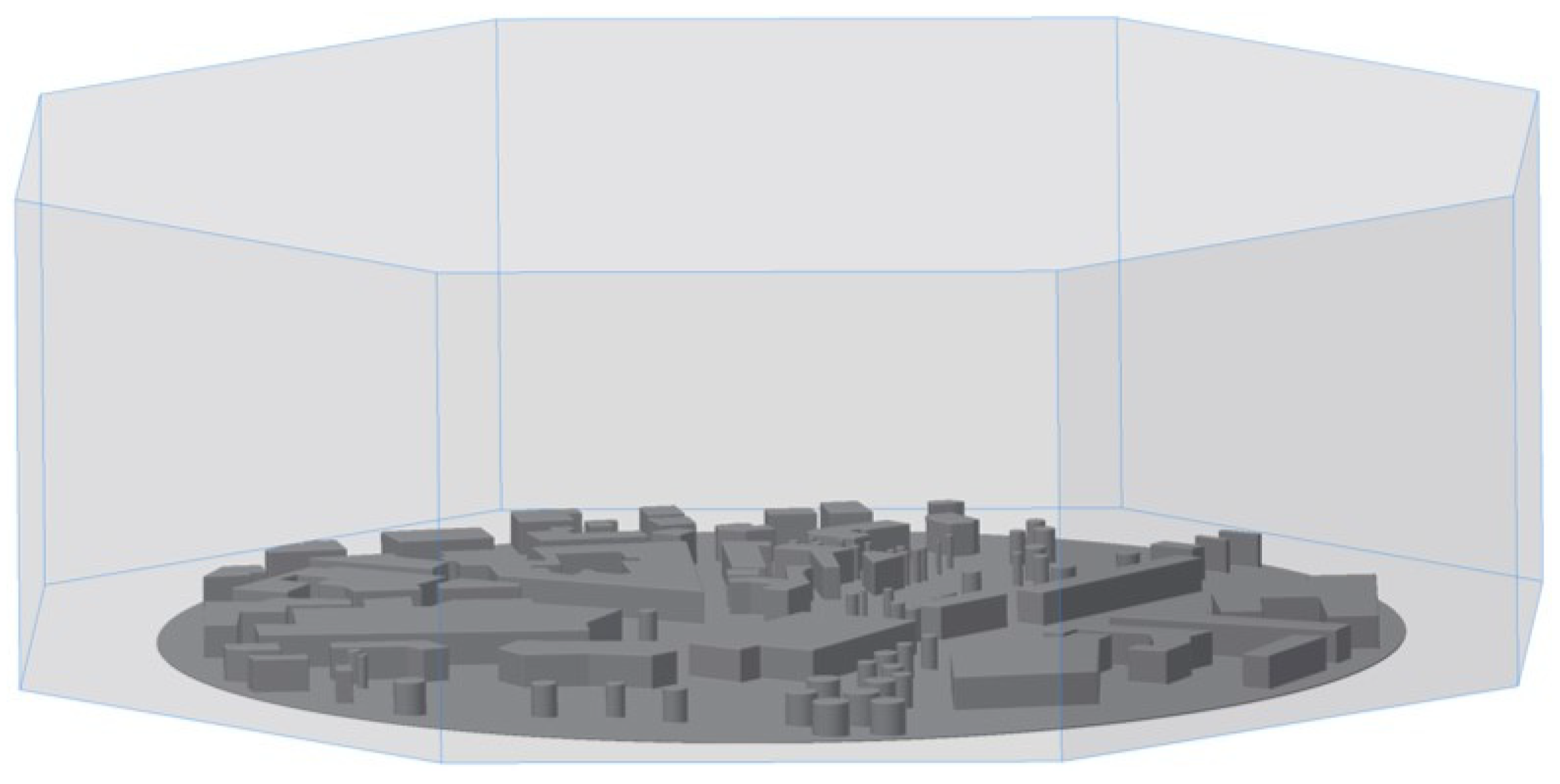
2.2. The Simulation Model
2.3. Environmental Measurements by Means of a Certified Measuring Station
3. Results
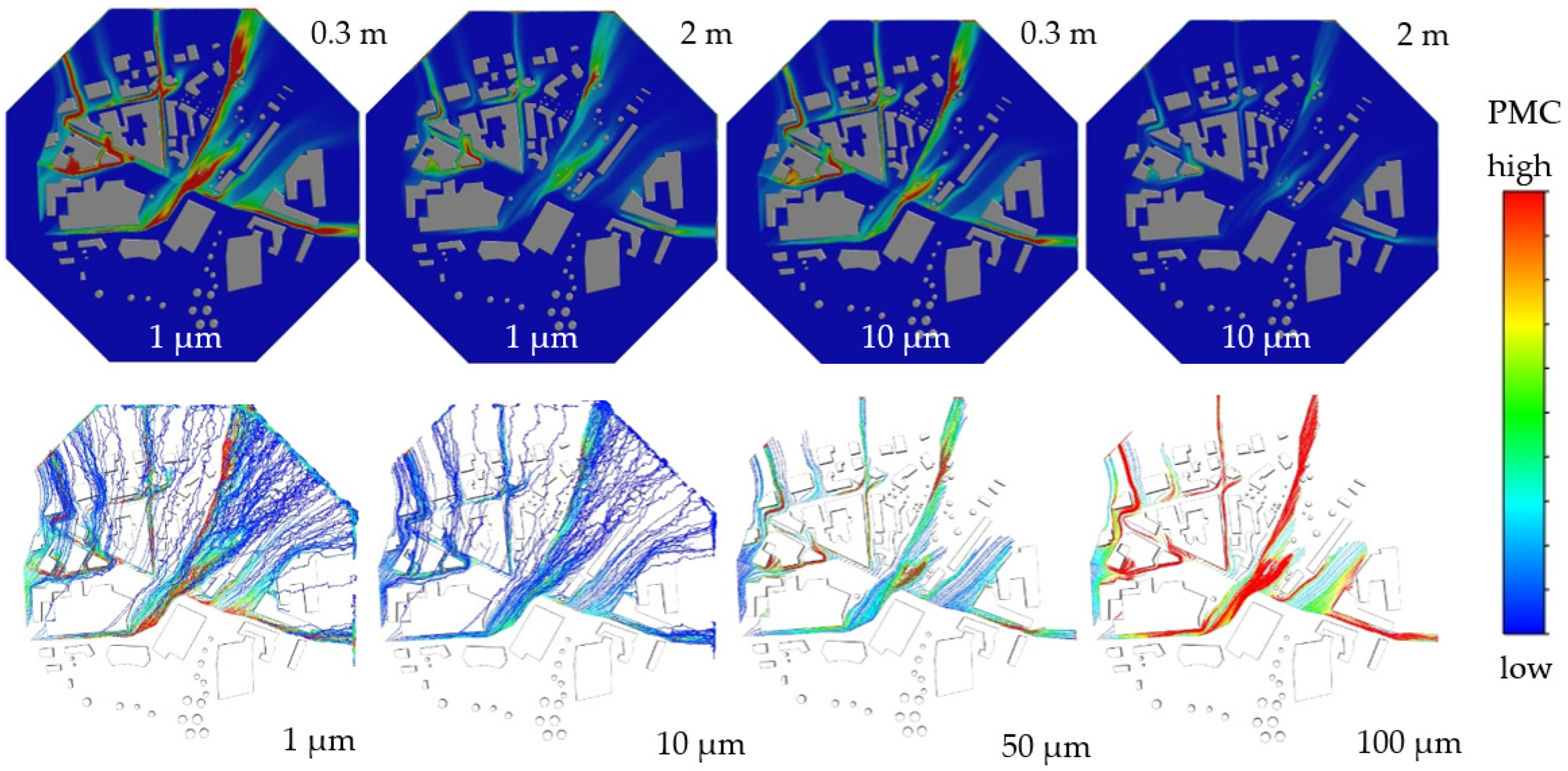
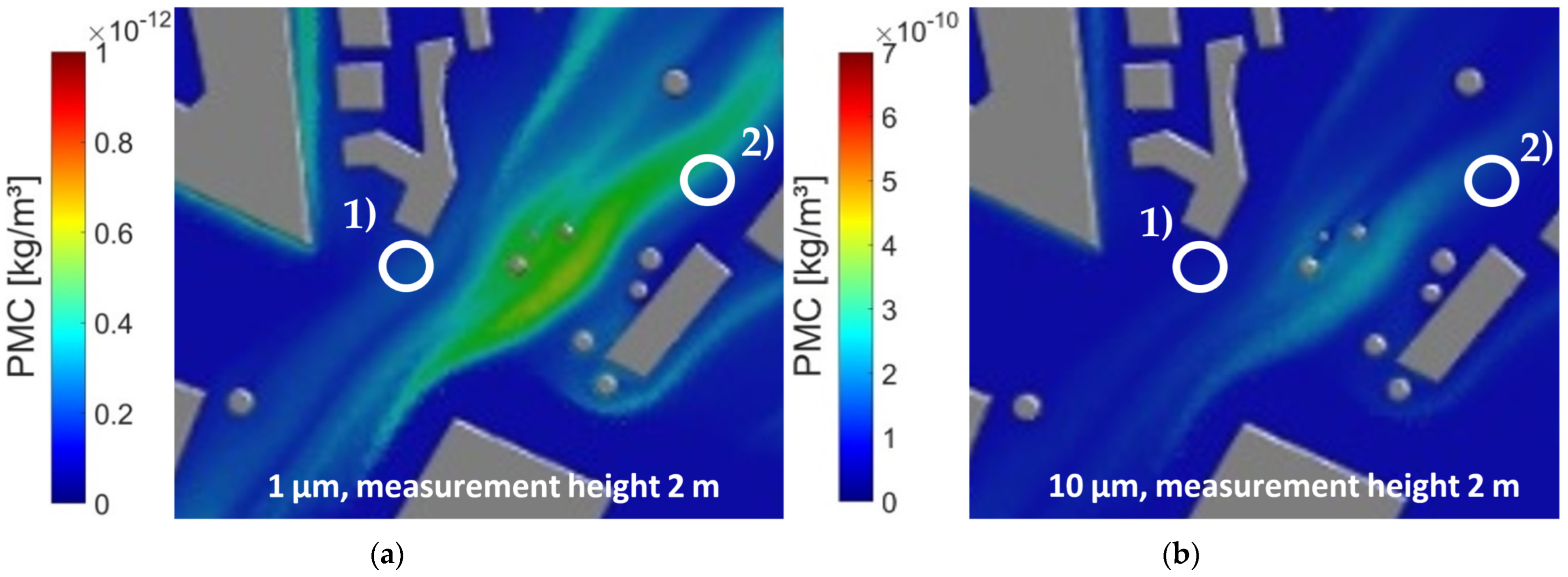
3.1. Flow Simulation and Particle Injection
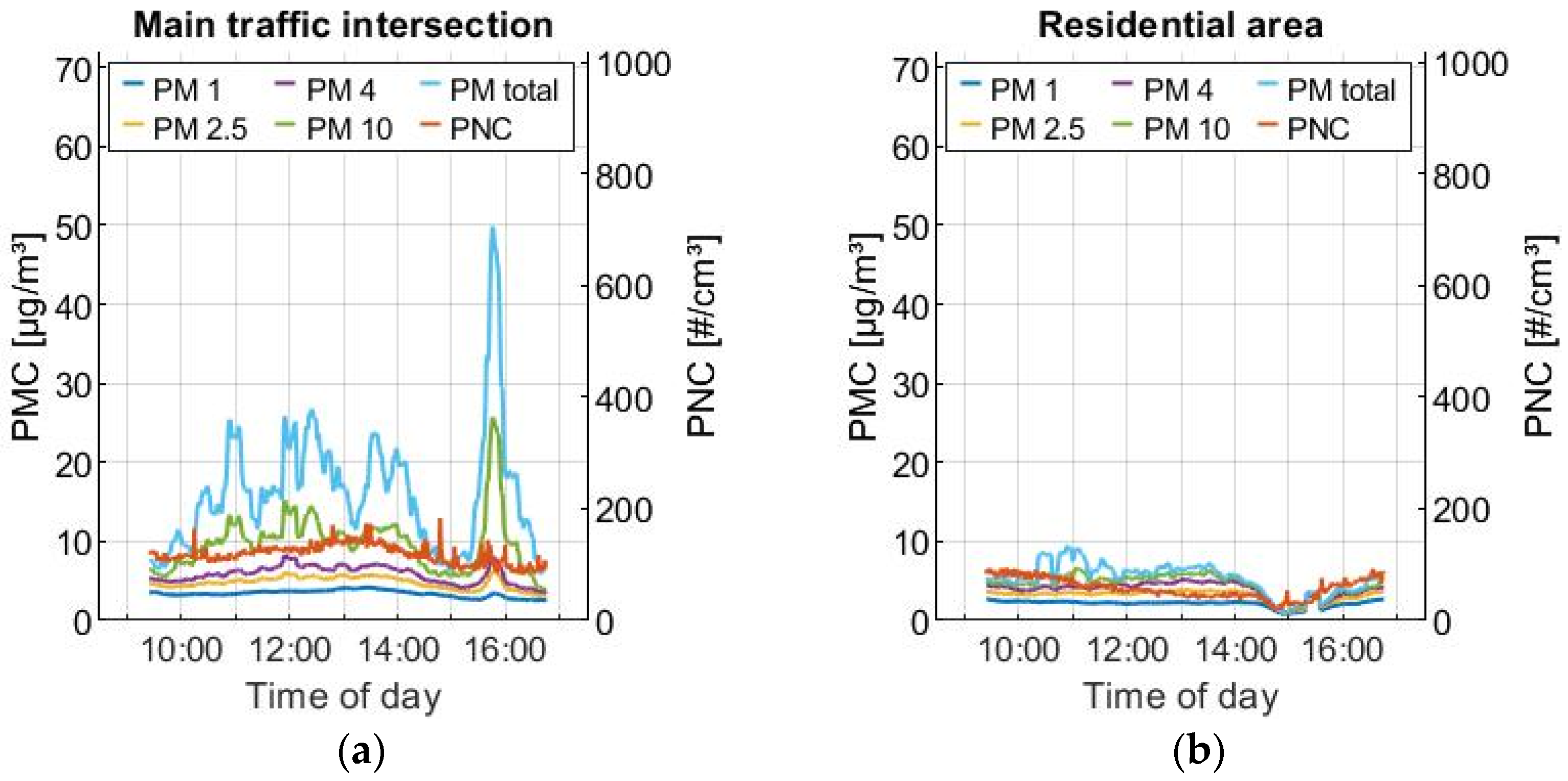
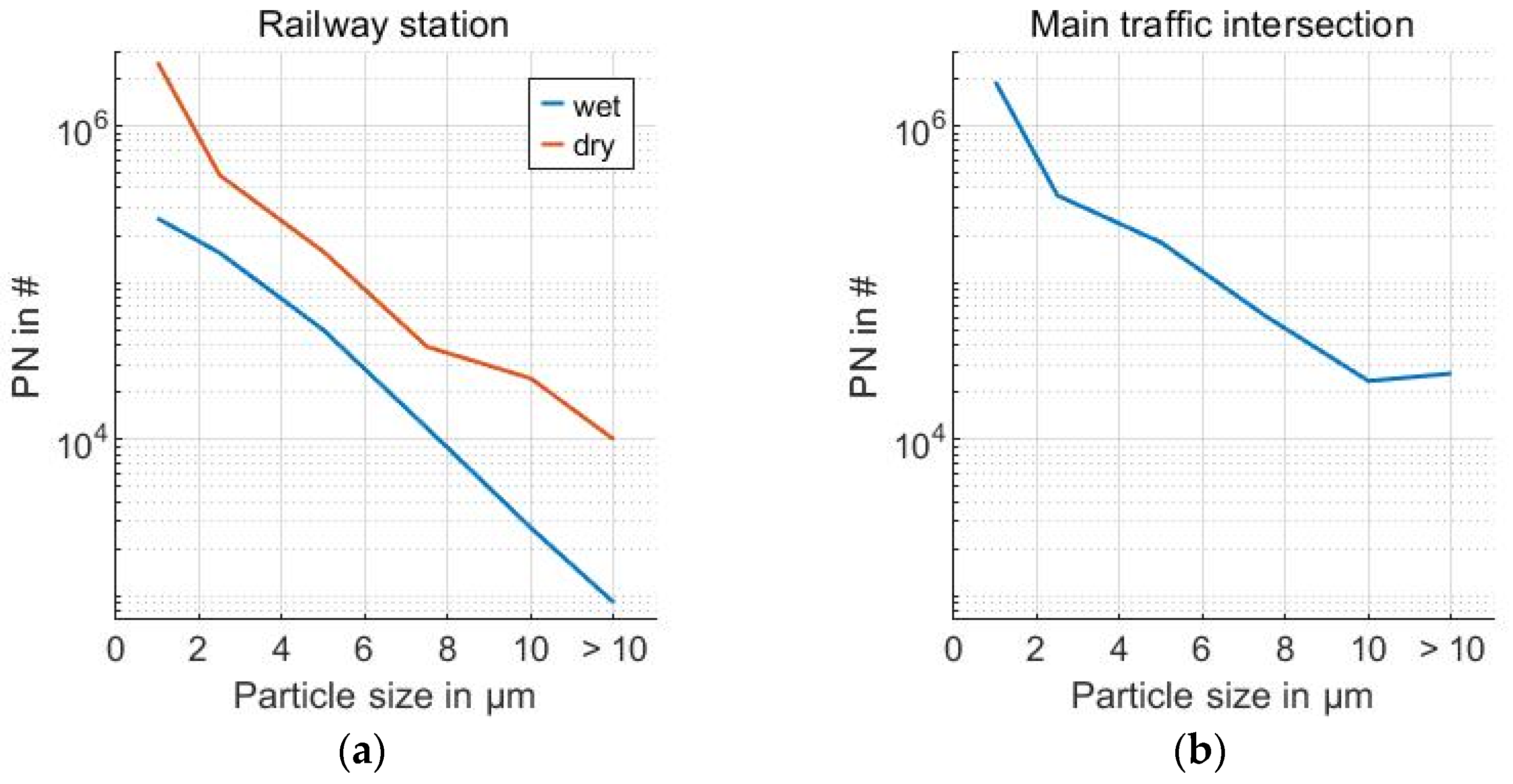
3.2. Real Measurements by Means of a Measuring Station
3.3. Comparison of Simulation and Real Measurements
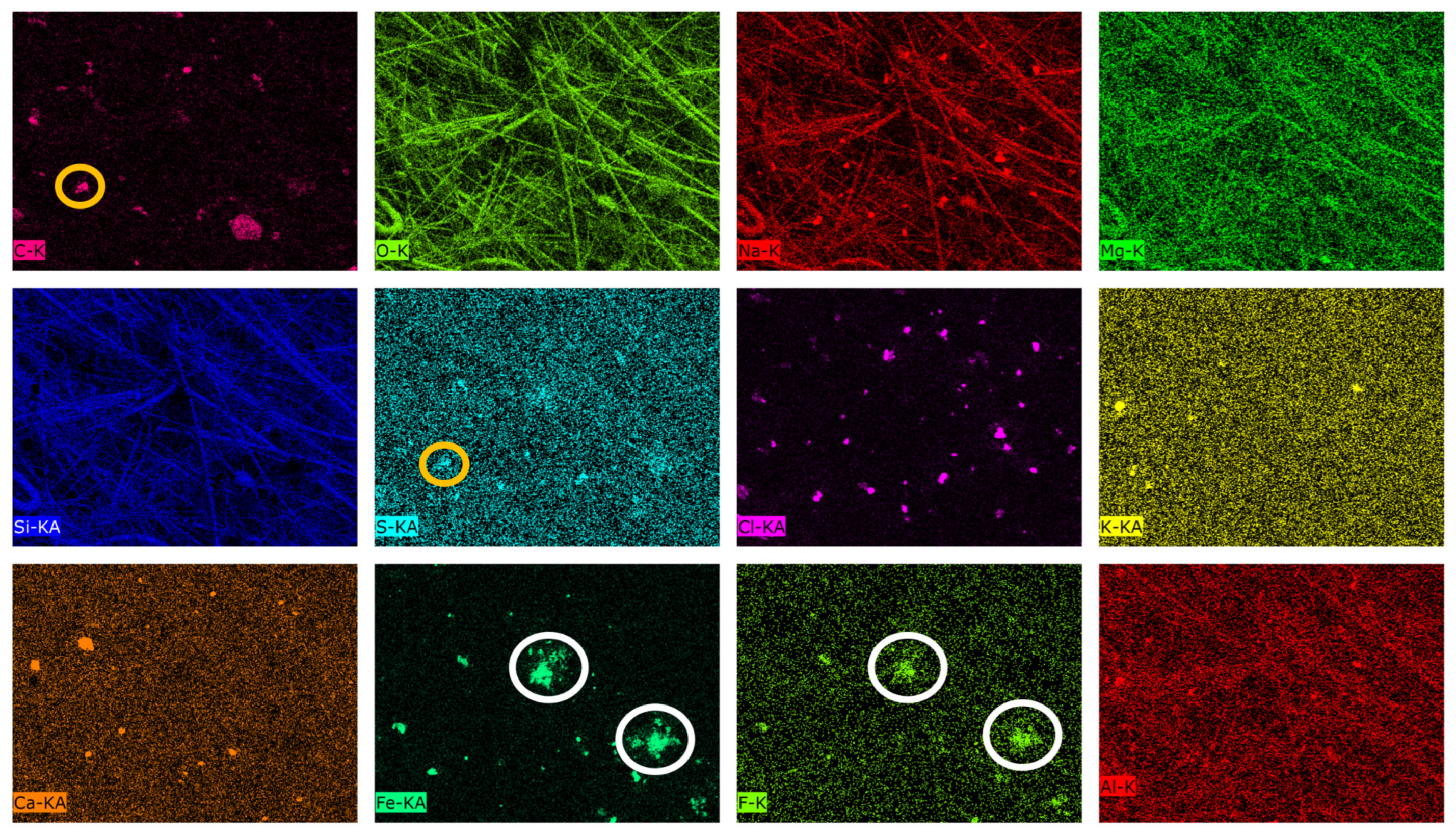
3.4. Chemical Analysis of the Filters by Means of EDX
4. Discussion
4.1. Evaluation and Classification of the Results
4.2. Limitations of the Methodology
4.3. Recommendations for Further Investigations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Pant, P.; Harrison, R.M. Estimation of the Contribution of Road Traffic Emissions to Particulate Matter Concentrations from Field Measurements: A Review. Atmos. Environ. 2013, 77, 78–97. [Google Scholar] [CrossRef]
- Oroumiyeh, F.; Zhu, Y. Brake and tire particles measured from on-road vehicles: Effects of vehicle mass and braking intensity. Atmos. Environ. X 2021, 12, 100121. [Google Scholar] [CrossRef]
- Hesse, D.; Hamatschek, C.; Feißel, T.; Sachse, H.; Augsburg, K.; Gramstat, S. Investigations on the Deposition Behaviour of Brake Wear Particles on the Wheel Surface; SAE Technical Paper 2021-01-1301; SAE: Ilmenau, Germany, 2021. [Google Scholar] [CrossRef]
- Hesse, D.; Hamatschek, C.; Augsburg, K.; Weigelt, T.; Prahst, A.; Gramstat, S. Testing of Alternative Disc Brakes and Friction Materials Regarding Brake Wear Particle Emissions and Temperature Behavior. Atmosphere 2021, 12, 436. [Google Scholar] [CrossRef]
- Hicks, W.; Beevers, S.; Tremper, A.H.; Stewart, G.; Priestman, M.; Kelly, F.J.; Lanoisellé, M.; Lowry, D.; Green, D.C. Quantification of Non-Exhaust Particulate Matter Traffic Emissions and the Impact of COVID-19 Lockdown at London Marylebone Road. Atmosphere 2021, 12, 190. [Google Scholar] [CrossRef]
- Charron, A.; Polo-Rehn, L.; Besombes, J.-L.; Golly, B.; Buisson, C.; Chanut, H.; Marchand, N.; Guillaud, G.; Jaffrezo, J.-L. Identification and Quantification of Particulate Tracers of Exhaust and Non-Exhaust Vehicle Emissions. Atmos. Chem. Phys. Discuss 2019, 19, 5187–5207. [Google Scholar] [CrossRef] [Green Version]
- Wik, A.; Dave, G. Occurrence and Effects of Tire Wear Particles in the Environment—A Critical Review and an Initial Risk Assessment. Environ. Pollut. 2009, 157, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Sathicq, M.B.; Sabatino, R.; Cesare, A.D.; Eckert, E.M.; Fontaneto, D.; Rogora, M.; Corno, G. PET particles raise microbiological concerns for human health while tyre wear microplastic particles potentially affect ecosystem services in waters. J. Hazard. Mater. 2022, 429, 128397. [Google Scholar] [CrossRef] [PubMed]
- Gkoutselis, G.; Rohrbach, S.; Harjes, J.; Obst, M.; Brachmann, A.; Horn, M.A.; Rambold, G. Microplastics accumulate fungal pathogens in terrestrial ecosystems. Sci. Rep. 2021, 11, 13214. [Google Scholar] [CrossRef] [PubMed]
- Amato, F.; Dimitropoulos, A.; Farrow, K.; Oueslati, W. Non-exhaust Particulate Emissions from Road Transport: An Ignored Environmental Policy Challenge; OECD Publ.: Paris, France, 2020; pp. 8–10. [Google Scholar] [CrossRef]
- Gnecco, I.; Berretta, C.; Lanza, L.G.; La Barbera, P. Storm water pollution in the urban environment of Genoa, Italy. Atmos. Res. 2005, 77, 60–73. [Google Scholar] [CrossRef]
- Rødland, E.S.; Lind, O.C.; Reid, M.J.; Heier, L.S.; Okoffo, E.D.; Rauert, C.; Thomas, K.V.; Meland, S. Occurrence of tire and road wear particles in urban and peri-urban snowbanks, and their potential environmental implications. Sci. Total Environ. 2022, 824, 153785. [Google Scholar] [CrossRef] [PubMed]
- Cunningham, B.; Harper, B.; Brander, S.; Harper, S. Toxicity of micro and nano tire particles and leachate for model freshwater organisms. J. Hazard. Mater. 2022, 429, 128319. [Google Scholar] [CrossRef] [PubMed]
- Fraunhofer-Institut für Umwelt-, Sicherheits- und Energietechnik UMSICHT; iMA Richter & Röckle KmbH & Co. KG.; Ingenieursgesellschaft Prof. Dr. Sieker mbH. Digitales Planungs- und Entscheidungsinstrument zur Verteilung, Ausbreitung und Quantifizierung von Reifenabrieb in Deutschland—TyreWearMapping. Final Rep. 2020, 19F2050A-C, 10–45. Available online: https://www.umsicht.fraunhofer.de/content/dam/umsicht/de/dokumente/kompetenz/prozesse/tyrewearmapping-schlussbericht.pdf (accessed on 21 July 2022).
- Ji, W.; Zhao, B. Numerical study of the effects of trees on outdoor particle concentration distributions. Build. Simul. 2014, 7, 417–427. [Google Scholar] [CrossRef]
- Müller, R. Entwicklung Einer Methode Zur Einbindung Real Gemessener Non-Exhaust Partikelemissionen in Ein CFD-Modell Eines Innenstadtszenarios. Bachelor’s Thesis, Technical University Ilmenau, Thuringia, Germany, 2020. [Google Scholar]
- Vogelsang, C.; Lusher, A.L.; Dadkhah, M.E.; Sundvor, I.; Umar, M.; Ranneklev, S.B.; Eidsvoll, D.; Meland, S. Microplastics in road dust—Characteristics, pathways and measures. Nor. Inst. Water Res. Res. Rep. 2020, 7526-2020, 34. Available online: http://hdl.handle.net/11250/2493537 (accessed on 21 July 2022).






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kunze, M.; Feißel, T.; Ivanov, V.; Bachmann, T.; Hesse, D.; Gramstat, S. Analysis of TRWP Particle Distribution in Urban and Suburban Landscapes, Connecting Real Road Measurements with Particle Distribution Simulation. Atmosphere 2022, 13, 1204. https://doi.org/10.3390/atmos13081204
Kunze M, Feißel T, Ivanov V, Bachmann T, Hesse D, Gramstat S. Analysis of TRWP Particle Distribution in Urban and Suburban Landscapes, Connecting Real Road Measurements with Particle Distribution Simulation. Atmosphere. 2022; 13(8):1204. https://doi.org/10.3390/atmos13081204
Chicago/Turabian StyleKunze, Miles, Toni Feißel, Valentin Ivanov, Thomas Bachmann, David Hesse, and Sebastian Gramstat. 2022. "Analysis of TRWP Particle Distribution in Urban and Suburban Landscapes, Connecting Real Road Measurements with Particle Distribution Simulation" Atmosphere 13, no. 8: 1204. https://doi.org/10.3390/atmos13081204
APA StyleKunze, M., Feißel, T., Ivanov, V., Bachmann, T., Hesse, D., & Gramstat, S. (2022). Analysis of TRWP Particle Distribution in Urban and Suburban Landscapes, Connecting Real Road Measurements with Particle Distribution Simulation. Atmosphere, 13(8), 1204. https://doi.org/10.3390/atmos13081204