
Identification of Pollution Sources in Urban Wind Environments Using the Regularized Residual Method



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- Compared with calculating a posteriori probability to infer source position, the implementation steps of the minimum regularization residual method are more concise and can save calculation time;
- (2)
- The regularized minimum residual method uses all the response sensor data to calculate the source strength and uses its calculation residual to calculate the source position, and the calculation results are more accurate.
2. Material and Methods
2.1. Algorithm for Identifying the Pollution Source
2.2. Simulation of Urban Architectural Ensembles and Sensor Placement
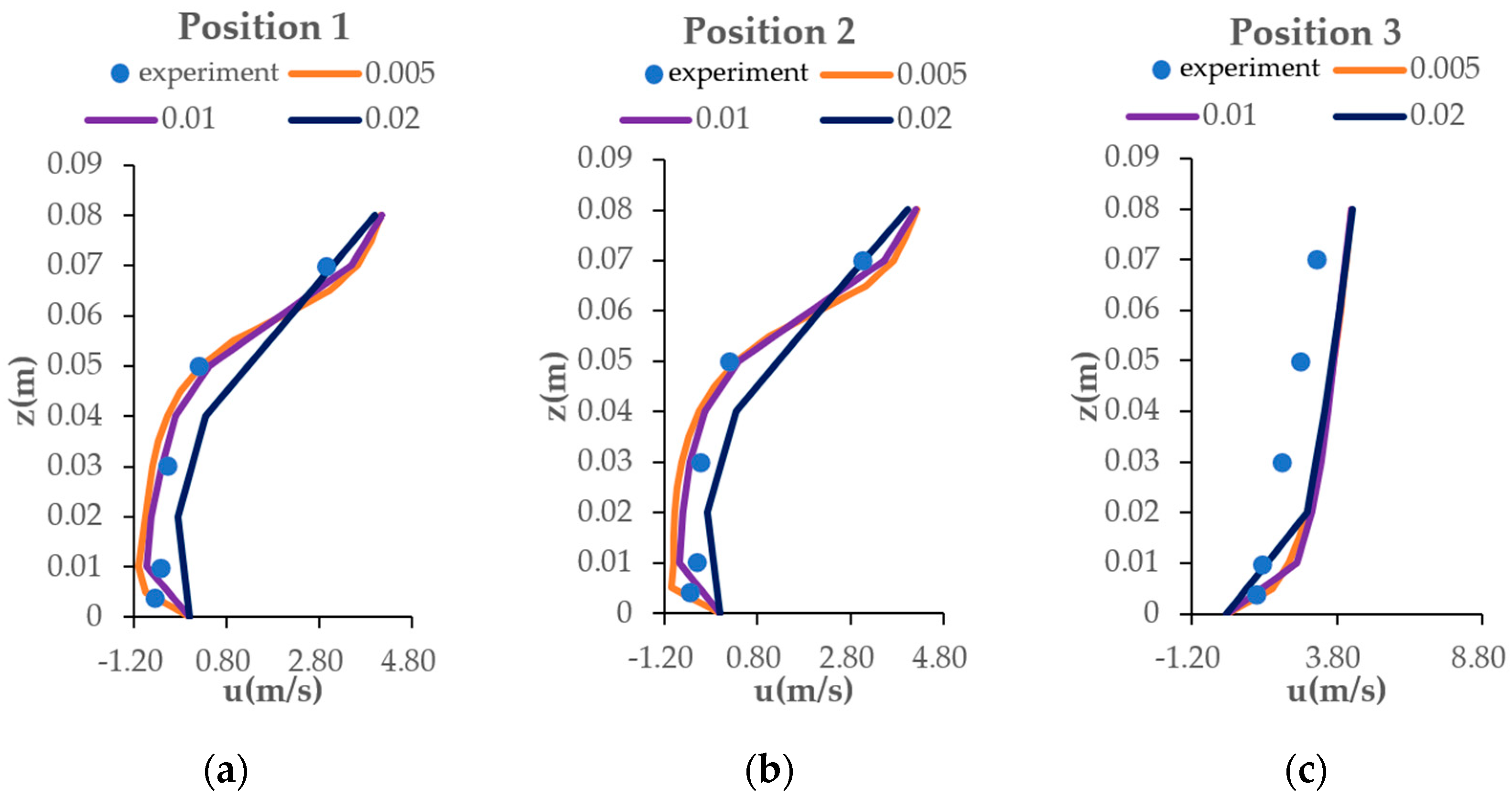
2.2.1. Simulation Settings for Urban Architectural Ensembles
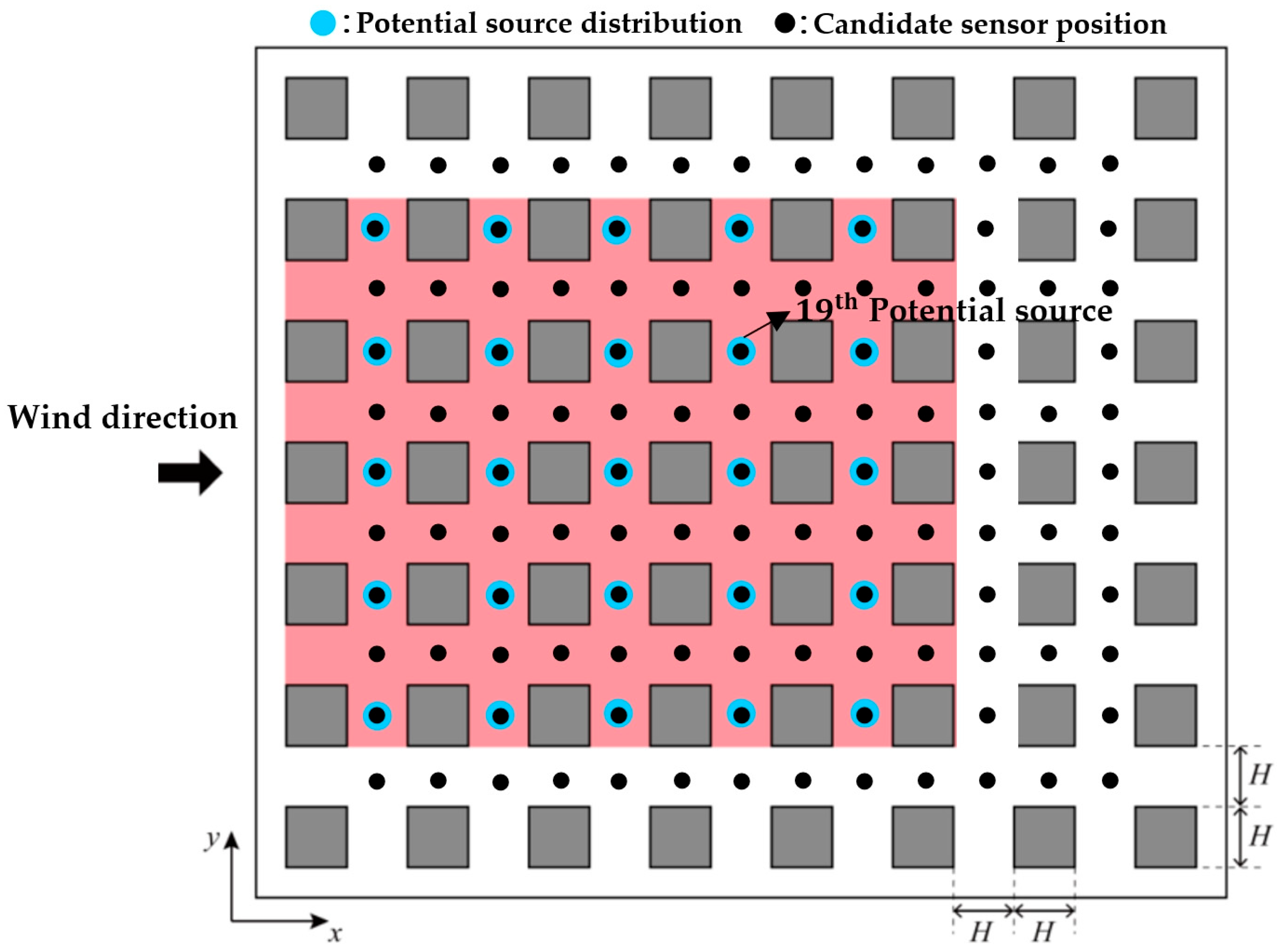
2.2.2. Potential Pollution Sources and Sensor Layout
3. Results
3.1. Independent Verification of the Number of Sensors
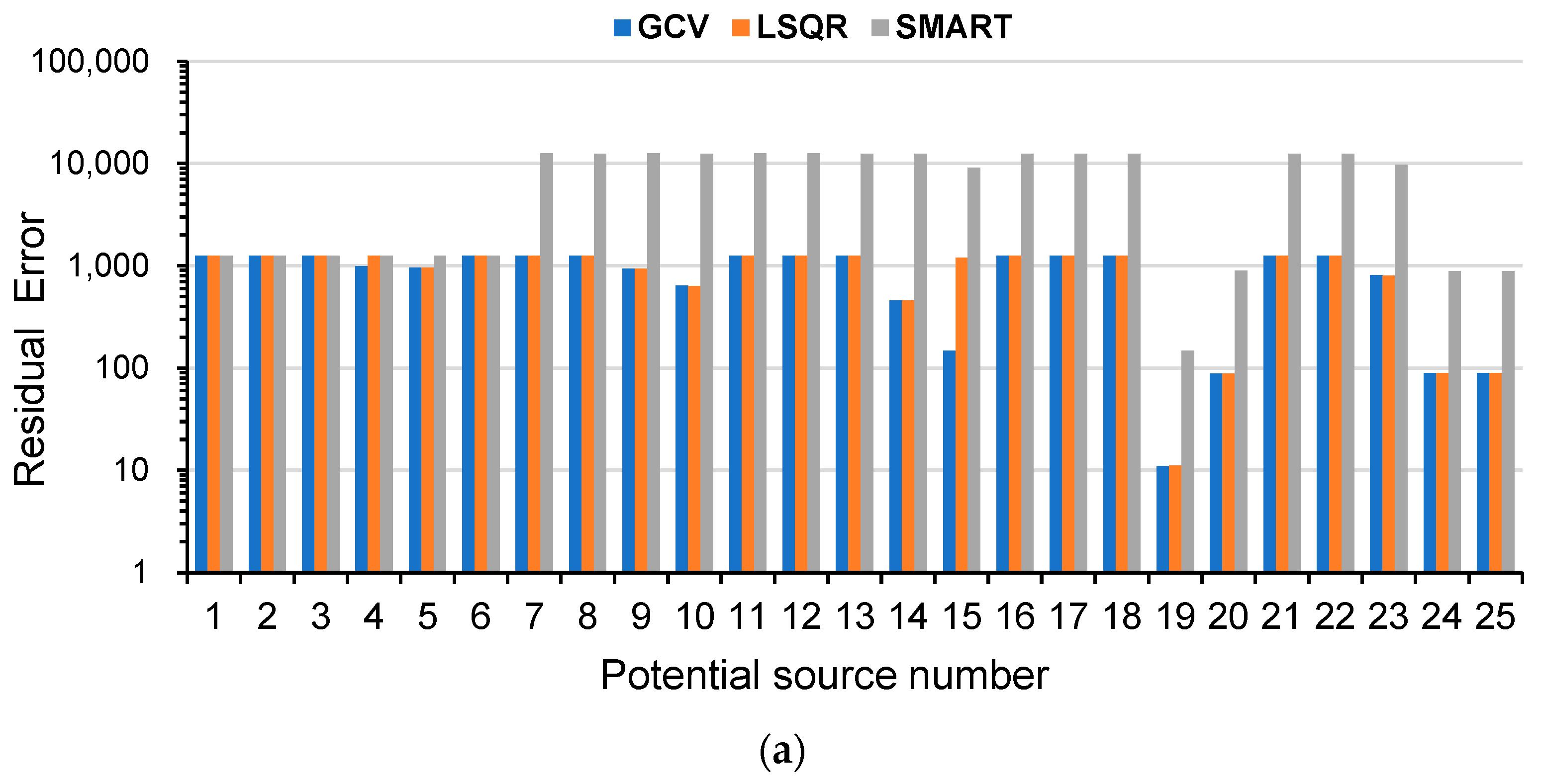
3.2. Identification Results for the Regularized Minimum Residual Method
3.3. Comparative Analysis with Bayesian Method
4. Discussion
5. Conclusions
- (1)
- Through the optimization calculation of different quantities of sensor networks, it was found that eight sensors can meet the needs of pollution source item identification for the example used herein.
- (2)
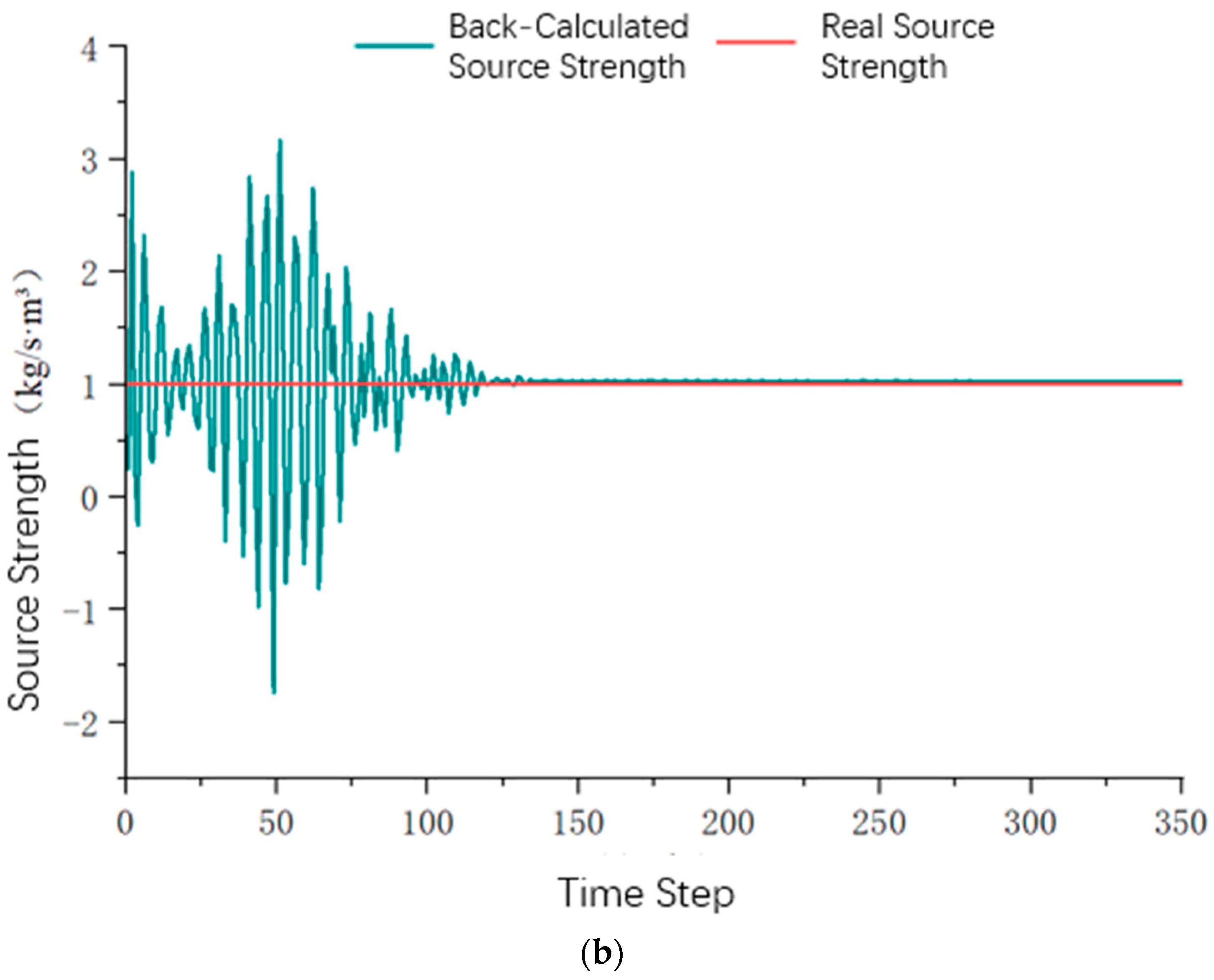
- The minimization residual method proposed in this study can be used to identify the source strengths and locations of potential sources in a city model. Using the calculation of constant sources and attenuation sources, the error of source strength identification is about 2%, and the location can be accurately identified.
- (3)
- Compared with the traditional method based on Bayes criterion, the minimization residual method utilizes the response information of multiple response sensors; this information is more accurate for the inverse calculation of source strength and more intuitive and accurate for position calculation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, P.; Wang, H.; Li, F.; Dai, Y.; Huang, C. Development of window opening models for residential building in hot summer and cold winter climate zone of China. Energy Built Environ. 2022, 3, 363–372. [Google Scholar]
- Ming, T.; Nie, C.; Li, W.; Kang, X.; Wu, Y.; Zhang, M.; Peng, C. Numerical study of reactive pollutants diffusion in urban street canyons with a viaduct. Build. Simul. 2022, 15, 1227–1241. [Google Scholar]
- Morino, Y.; Ohara, T.; Masato, N. Atmospheric behavior, deposition, and budget of radioactive materials from the Fukushima Daiichi nuclear power plant in March 2011. Geophys. Res. Lett. 2011, 38, L00G11. [Google Scholar]
- U.S. EPA. EPA Strategic Plan; U.S. EPA: Washington, DC, USA, 2014. [Google Scholar]
- Li, F.; Zhuang, J.; Li, M.; Cai, H.; Zhang, J.; Cao, X. Reconstruction of airflow path parameters in multizone models based on Bayesian inference and measured data. Build. Environ. 2022, 209, 108689. [Google Scholar]
- Keats, A.; Yee, E.; Lien, F.S. Bayesian inference for source determination with applications to a complex urban environment. Atmos. Environ. 2007, 41, 465–479. [Google Scholar]
- Keats, A.; Yee, E.; Lien, F.S. Information-driven receptor placement for contaminant source determination. Environ. Model. Softw. 2010, 25, 1000–1013. [Google Scholar]
- Liu, Z.Z.; Li, X.F. The impact of sensor layout on Source Term Estimation in urban neighborhood. Build. Environ. 2016, 213, 108859. [Google Scholar]
- Ngae, P.; Kouichi, H.; Kumar, P.; Feiz, A.C. Optimization of Urban Monitoring Network for Emergency Response Applications: An Approach for Characterising Source of Hazardous Releases, LMEE, Université d’Evry V al-d’Essonne. Q. J. R. Meteorol. Society 2019, 145, 967–981. [Google Scholar]
- Himanshu, S.; Anthony, D.F.; Umesh, V.; Baskar, G. Transfer Operator Theoretic Framework for Monitoring Building Indoor Environment in Uncertain Operating Conditions. In Proceedings of the Annua American Control Conference, Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Jia, H.Y.; Kikumoto, H. Sensor configuration optimization based on the entropy of adjoint concentration distribution for stochastic source term estimation in urban environment. Sustain. Cities Soc. 2022, 79, 103726. [Google Scholar]
- Waeytens, J.; Sadr, S. Computer-aided placement of air quality sensors using adjoint framework and sensor features to localize indoor source emission. Build. Environ. 2018, 144, 184–193. [Google Scholar]
- Pudykiewicz, J.A. Application of adjoint tracer transport equations for evaluating source parameters. Atmos. Environ. 1998, 32, 3039–3050. [Google Scholar]
- Xue, F.; Li, X.F.; Ooka, R.; Kikumoto, H.; Zhang, W. Turbulent Schmidt number for source term estimation using Bayesian inference. Build. Environ. 2017, 125, 414–422. [Google Scholar]
- Sharan, M.; Singh, S.K.; Issartel, J.P. Least Square Data Assimilation for Identification of the Point Source Emissions. Pure Appl. Geophys. 2012, 169, 483–497. [Google Scholar]
- Allen, C.T.; Haupt, S.E.; Young, G.S. Source characterization with a genetic algorithm-coupled dispersion-backward model incorporating scipuff. J. Appl. Meteorol. Clim. 2007, 46, 273–287. [Google Scholar]
- Annunzio, A.J.; Young, G.S.; Haupt, S.E. Utilizing state estimation to determine the source location for a contaminant. Atmos. Environ. 2012, 46, 580–589. [Google Scholar]
- Thomson, L.C.; Hirst, B.; Gibson, G.; Gillespie, S.; Jonathan, P.; Skeldon, K.D.; Padgett, M.J. An improved algorithm for locating a gas source using inverse methods. Atmos. Environ. 2007, 41, 1128–1134. [Google Scholar]
- Kim, Y.J.; Gu, C. Smoothing spline Gaussian regression: More scalable computation via efficient approximation. J. R. Stat. Soc. Ser. B (Stat. Methodol.) 2004, 66, 337–356. [Google Scholar]
- Jeon, M.G.; Deguchi, Y.; Kamimoto, T.; Doh, D.H.; Cho, G.R. Performances of new reconstruction algorithms for CT-TDLAS (computer tomography-tunable diode laser absorption spectroscopy). Appl. Therm. Eng. 2017, 115, 1148–1160. [Google Scholar]
- Paige, C.C.; Saunders, M.A. LSQR: An algorithm for sparse linear equations and sparse least squares. ACM Trans. Math. Softw. (TOMS) 1982, 8, 43–71. [Google Scholar]
- Jing, Y.; Li, F.; Gu, Z.; Tang, S. Identifying spatiotemporal information of the point pollutant source indoors based on the adjoint-regularization method. Build. Simul. 2013, 16, 589–602. [Google Scholar]
- Yoshihide, T.; Ted, S. CFD simulations of near-field pollutant dispersion with different plume buoyancies. Build. Environ. 2018, 131, 128–139. [Google Scholar]
- Beatriz, S.; Jose Luis, S.; Alberto, M.; Magdalena, P.; Lourdes, N.; Manuel, P.; Jaime, F. NOx depolluting performance of photocatalytic materials in an urban area–Part II: Assessment through Computational Fluid Dynamics simulations. Atmos. Environ. 2021, 246, 118091. [Google Scholar]
- Tominaga, Y.; Mochida, A.; Yoshie, R.; Kataoka, H.; Nozu, T.; Yoshikawa, M.; Shirasawa, T. AIJ guidelines for practical applications of CFD to pedestrian wind environment around buildings. J. Wind Eng. Ind. Aerodyn. 2008, 96, 1749–1761. [Google Scholar]
- Coceal, O.; Thomas, T.G.; Castro, I.P.; Belcher, S.E. Mean flow and turbulence statistics over groups of urban-like cubical obstacles. Bound. -Layer Meteorol. 2006, 121, 491–519. [Google Scholar]
- Lin, C.; Ooka, R.; Kikumoto, H.; Jia, H. Eulerian RANS simulations of near-field pollutant dispersion around buildings using concentration diffusivity limiter with travel time. Build. Environ. 2021, 202, 108047. [Google Scholar]
- Liu, J.; Niu, J. CFD simulation of the wind environment around an isolated high-rise building: An evaluation of SARNS. LES DES Models. Build. Environ. 2016, 96, 91–106. [Google Scholar]
- An, K.; Wong, S.M.; Fung, J.C.H. Exploration of sustainable building morphologies for effective passive pollutant dispersion within compact urban environments. Build. Environ. 2019, 148, 508–523. [Google Scholar]
- Cheng, W.C.; Liu, C.H.; Ho, Y.K.; Mo, Z.; Wu, Z.; Li, W.; Chan, L.Y.L.; Kwan, W.K.; Yau, H.T. Turbulent flows over real heterogeneous urban surfaces: Wind tunnel experiments and Reynolds-averaged Navier-Stokes simulations. Build. Simul. 2021, 14, 1345–1358. [Google Scholar]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Fuentes, M.; Chaudhuri, A.; Holland, D.M. Bayesian entropy for spatial sampling design of environmental data. Environ. Ecol. Stat. 2007, 14, 323–340. [Google Scholar]
- Tong, Z.; Luo, Y.; Zhou, J. Mapping the urban natural ventilation potential by hydrological simulation. Build. Simul. 2021, 14, 351–364. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, S.; Xue, X.; Li, F.; Gu, Z.; Jia, H.; Cao, X. Identification of Pollution Sources in Urban Wind Environments Using the Regularized Residual Method. Atmosphere 2023, 14, 1786. https://doi.org/10.3390/atmos14121786
Tang S, Xue X, Li F, Gu Z, Jia H, Cao X. Identification of Pollution Sources in Urban Wind Environments Using the Regularized Residual Method. Atmosphere. 2023; 14(12):1786. https://doi.org/10.3390/atmos14121786
Chicago/Turabian StyleTang, Shibo, Xiaotong Xue, Fei Li, Zhonglin Gu, Hongyuan Jia, and Xiaodong Cao. 2023. "Identification of Pollution Sources in Urban Wind Environments Using the Regularized Residual Method" Atmosphere 14, no. 12: 1786. https://doi.org/10.3390/atmos14121786
APA StyleTang, S., Xue, X., Li, F., Gu, Z., Jia, H., & Cao, X. (2023). Identification of Pollution Sources in Urban Wind Environments Using the Regularized Residual Method. Atmosphere, 14(12), 1786. https://doi.org/10.3390/atmos14121786