1. Introduction
Water scarcity and quality degradation are set to become the main environmental problems for all countries in the Mediterranean region in the near future. Due mainly to population growth, pressure on agriculture and demand for water to irrigate food crops have also increased. Indeed, agriculture in Mediterranean countries (apart from those in the eastern Adriatic and France) accounted for 64% of overall demand in the period 2005–2010 (49% in the North, 74% and 81% in the South and East) [
1]. In Mediterranean countries the irrigated area has more than doubled in 40 years, totaling 24,200,000 ha in 2009 (17.8 million in the Mediterranean Europe and 6.4 million in Northern Africa). The growing demand for irrigation water will be mainly met by over-exploiting both renewable and fossil groundwater, prompting seawater intrusion which leads to soil salinization problems in the frequent cases of ineffective irrigation management. Indeed, irrigation is often wasteful and highly inefficient [
2]. In an attempt to tackle the problem in Italy and other Mediterranean regions, open-channel irrigation systems have been (or are going to be) converted into pressurized pipeline networks. In most cases, the "on-demand" method for water distribution has been adopted to replace the old rotational schedule.
However, experience shows that even for on-demand pressurized irrigation systems the performance of distribution networks is still frequently far from acceptable in terms of efficiency for both (1) economic/political and (2) technical reasons.
First, even in on-demand irrigation distribution networks, the problem of unmeasured and generally excessive application of irrigation water frequently occurs. This is mostly due to the fact that the price of the water does not reflect the true cost of provision but is kept deliberately low, sometimes for political reasons, by government subsidy. In such cases, the price of irrigation water may be lower than the cost of the labor or equipment needed to avoid over-irrigation, both for the farmer and the distribution network manager. Where water is delivered to the consumer only at fixed times and/or charges are set either per delivery or per hectare regardless of the actual water amount used, farmers tend to take as much water as they can while they can. This generally results in over-irrigation, which wastes both water and nutrients. In some Mediterranean countries the excessive water applied may lead to other serious problems, such as rising water tables, waterlogging and upward movement of salts.
Secondly, in the on-demand framework the manager of the distribution network has little control over water scheduling and hence on the performance of the distribution network. According to the particular combination of farmers who decide to irrigate at a given time (which is not known a priori), the discharges flowing inside the distribution network may change. Under such conditions the actual availability of water resources and the ability of the conveyance hydraulic system may not be able to provide the discharge which the farmers require at a given time. Moreover, under changing (and unknown a priori) discharges, the pressure head in the system can be subject to high fluctuation, with consequent impacts on the efficiency of on-farm irrigation systems [
3] also in terms of energy to be spent on water distribution.
The twofold—economic and technical—nature of the problem calls for different kinds of solutions. On the one hand, solutions should come from a change of attitude in managing irrigation water by quantifying the profitability of irrigation water in much the same way as other economic products. In other words, the agricultural sector should seek to maximize the economic return per unit of water (water productivity). On the other hand, irrigation managers should be able to independently assess water demand in relation to the actual availability of water resources and the capability of the conveyance system (a top-down approach). The irrigation managers, provided with appropriate support tools, should be able to determine actual crop water requirements, deciding the optimal timing, quantity and quality of irrigation water to be supplied to the soil in each farm in order to control crop yield, while minimizing deep percolation fluxes of water and nutrients, hence water losses and groundwater degradation.
In this context, the use of decision support systems (DSS) may significantly enhance the management of on-demand irrigation systems. Advanced technical tools are nowadays available for monitoring and simulating the various physical processes involved in an irrigation system. Such tools can be used in an integrated way for estimating irrigation water demand and scheduling water use, and thus for simulating the operation of on-demand irrigation networks, under varying soil and weather conditions, crop management options and irrigation technologies.
In general, by integrating the above technical tools with economic instruments, such systems may facilitate the decision-making process on the quantities of water to be allocated to agricultural consumers. Such tools may take into account the most profitable cropping patterns given any water restrictions imposed by existing hydrological conditions, as well as the potential yields in each irrigation district according to its production characteristics, irrigation efficiency, economic scenario and external factors such as agricultural policies.
Against this background, this paper aims to illustrate the application at district scale of a physically-based agro-hydrological model for identifying optimal irrigation water needs in a context of on-demand irrigation systems. The model, called FLOWS-HAGES, simulates district-level water use and scheduling over the course of an irrigation season. The methodology will be applied for sector 6 of Irrigation District 10 in the “Sinistra Ofanto” irrigation system.
The paper is mostly devoted to illustrating the features of the FLOWS-HAGES model. The interaction of this model with a tool simulating the operation of on-demand irrigation networks by the irrigation manager will be the subject of a follow-up paper where, from a technical point of view, the following aspects of irrigation will be solved: spatial and temporal variability of soil water deficit, spatial and temporal variability of farmers’ water demand, water resources availability and structural capability of the irrigation conveyance and distribution network.
2. Materials and Methods
2.1. The FLOWS-HAGES Model
The model simulates water flow and solute transport in heterogeneous agri-environmental systems (termed FLOWS-HAGES). It produces information on the evolution of:
Soil water contents and pressure potentials in the soil profile;
Water uptake and actual evapotranspiration (actual water needs);
Solute (e.g., nitrates, pesticides, salts, heavy metals) concentrations in the soil profile;
Deep percolation water fluxes (return flow to the groundwater) and their quality in terms of solute (solute fluxes);
Stress periods for each crop.
The numerical tool is shaped to be run in different configurations and for different purposes:
To provide effective water requirement data to be used for optimal management of the irrigation network;
To facilitate the decision-making process on the quantities of water to be allocated to agricultural users;
To consider the most profitable cropping patterns given water availability restrictions imposed by the existing hydrological systems, and the potential yields reached in each irrigation district according to its productive characteristics, irrigation efficiency, economic scenario and external factors such as agricultural policies;
To predict the impact of anticipated climate changes on the irrigation system under the current land use and vegetation cover;
To predict the impact of human-driven changes in the land use on the irrigation system under current climate conditions;
To predict the impacts on the irrigation system under mixed conditions 4–5.
All the evaluations above can also be carried out in a stochastic framework, thus providing uncertainty bands for each of the main outputs.
The numerical code was written in Matlab and is based on a standard finite difference scheme [
4,
5,
6]. In the model, vertical transient flow is simulated by numerically solving the 1D form of the Richards equation using an implicit, backward, finite differences scheme with explicit linearization.
The model discretizes the spatial flow field in a prescribed number of nodes (usually 100) of constant width (Δ
z). Time discretization starts with a prescribed initial time increment (Δ
t). This time increment is automatically adjusted at each time level according to the criteria proposed by Vogel [
7].
Flow rates and pressure heads, whether constant or variable over time, can be assumed as the upper boundary condition. Gradients of different value, pressure heads or flow rates, again whether constant or variable, can be assumed at the bottom of the soil profile. In this study, daily potential evapotranspiration and rain were assumed at the upper boundary whereas free drainage was assumed at the bottom boundary.
Details on the water and solute transport equations and the sink term calculations are given in the
Appendix. Details of the criteria adopted by the model to control irrigation are reported below.
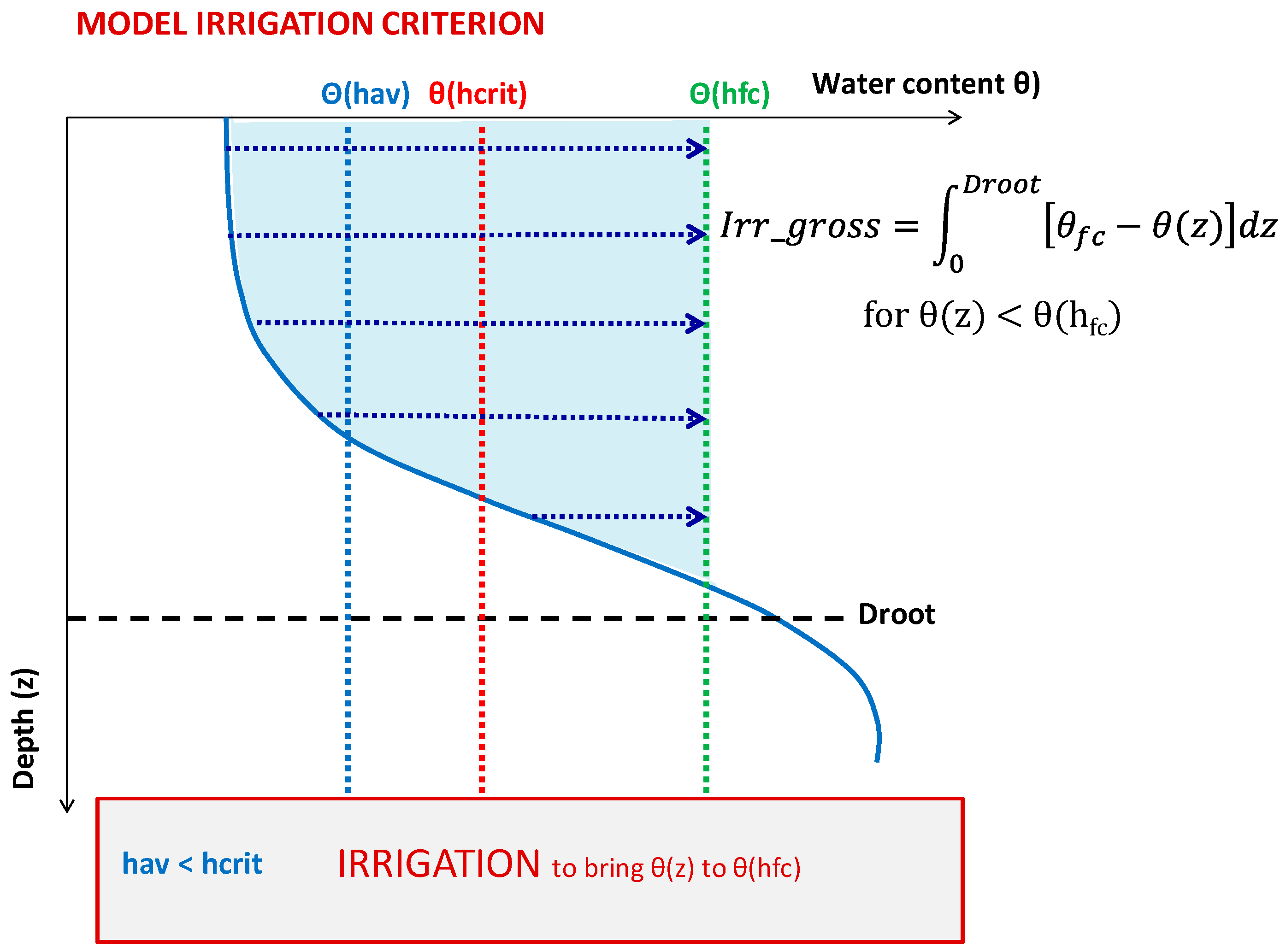
The criterion used by the model to calculate the time for irrigation and the irrigation volume is schematically summarized in
Figure 1a,b.
If
hav remains higher than
hcrit, this means that on average the pressure head
h lies above the stress condition and no irrigation is required (
Figure 1a). Irrigation starts any time
hav becomes lower than
hcrit (
Figure 1b). In other words, it is assumed that stress starts when the average pressure head in the root zone becomes lower than the threshold for water stress.
The model evaluates the gross irrigation volume to be supplied at day
t to the soil profile,
Irrgross, as follows:
Again, irrigation aims to bring the actual water content at each depth to the water content at field capacity.
Figure 2 provides a schematic view of this calculation. Net irrigation,
Irrnet, to be supplied on day
t is calculated as the difference between
Irrgross and the eventual rain falling at the time when the irrigation starts.
If the rainfall exceeds Irrgross, irrigation water is not supplied.
At the irrigation network management level, the actual irrigation amount (cm),
Irract, may be obtained by dividing
Irrnet by the on-farm irrigation efficiency, IE, of the irrigation system used for the crop considered, to give:
The duration of a hydrant opening,
tirr, to satisfy a given
Irract at day
t is
q being the nominal discharge of the hydrant considered (l/s),
A (ha) the area to be irrigated and
k a factor to account for the different dimensions in the equation.
In practice, by repeating the same reasoning for each of the fields included in the irrigation sector, the FLOWS-HAGES model identifies the number, time and position of hydrants to be in operation at day t. By aggregating the irrigation demand (the Irract) for each field in the sector for day t, the model calculates the overall discharge to be delivered in that day (the discharge to be delivered at the sector head).
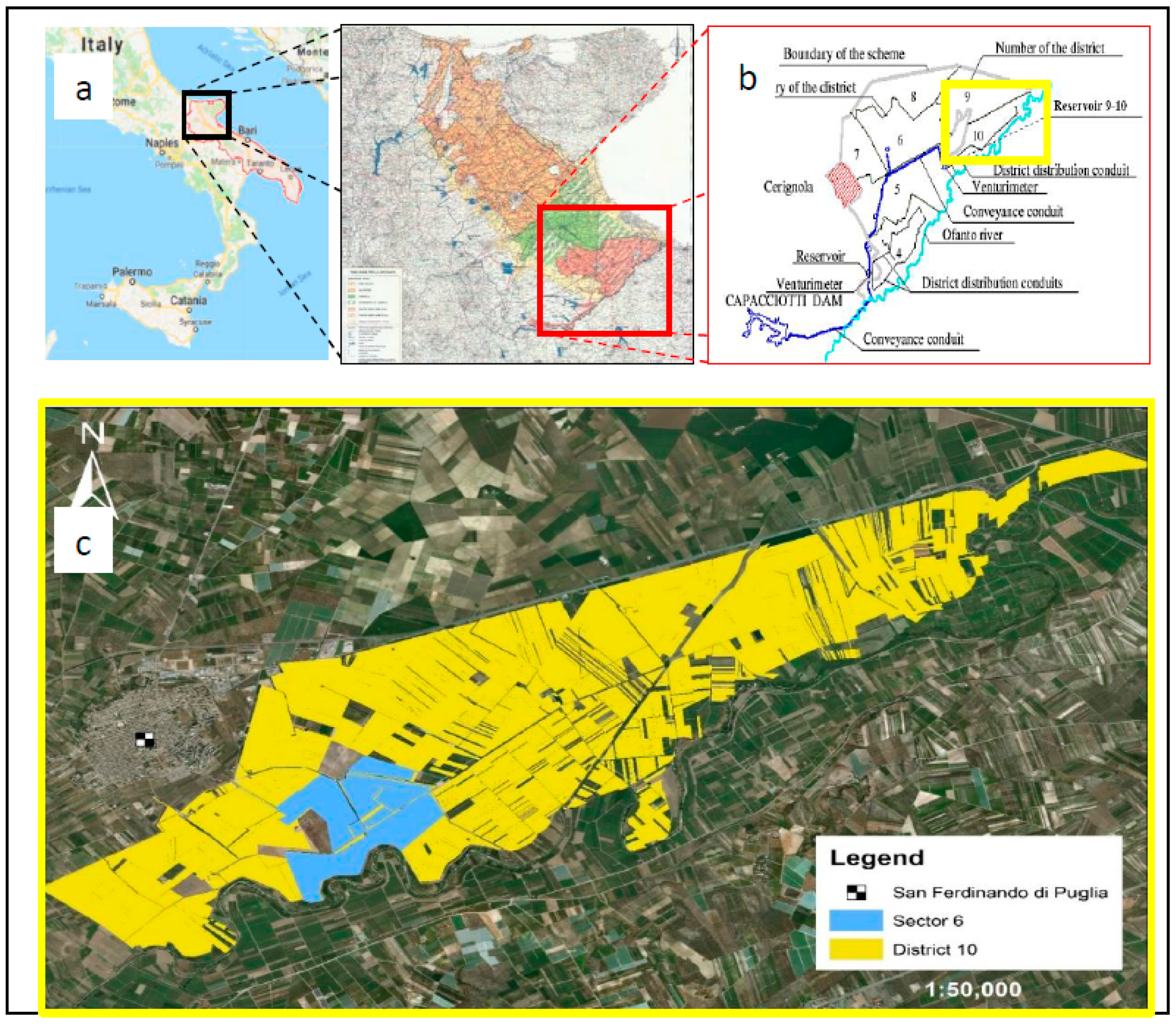
2.2. Sector 6 of the Capitanata Irrigation Network
The study area belongs to the Capitanata Irrigation Network (in Italian, Consorzio per la Bonifica della Capitanata CBC), Apulia, southern Italy) (
Figure 3). The CBC is currently managed by a local water users’ organization (WUO), called Consorzio per la Bonifica della Capitanata and covers an area of 22,500 ha. The area is operated with a pressurized on-demand delivery schedule and with a “low zone,” where water is supplied to farms by gravity, and a “high zone” where farms are at higher elevations than the water source and irrigation water is conveyed and supplied by a lifting plant. The CBC-low zone consists of seven districts, each sub-divided into smaller operational units (“sectors”) consisting of several grouped farms.
District 10 of the low zone was specifically considered in this study, covering an overall area of about 2000 ha, of which the total irrigable area is 1679 ha and the area currently irrigated is 1423 ha. Irrigation water comes from a storage and compensation reservoir, with a total capacity of about 50,000 m
3, which in turn is supplied with water by the Capacciotti dam. The hydraulic scheme of the low zone is presented in
Figure 3b.
In this paper, the model was applied to Sector 6 (
Figure 3c). The latter has an area of 139 ha with an average farm size ranging from 0.5 to 2.5 ha. Agriculture in the area is intensive and highly market-oriented. However, the average yearly precipitation in the area is about 550 mm, which is poorly distributed throughout the year. Consequently, intensive farming mostly depends on irrigation.
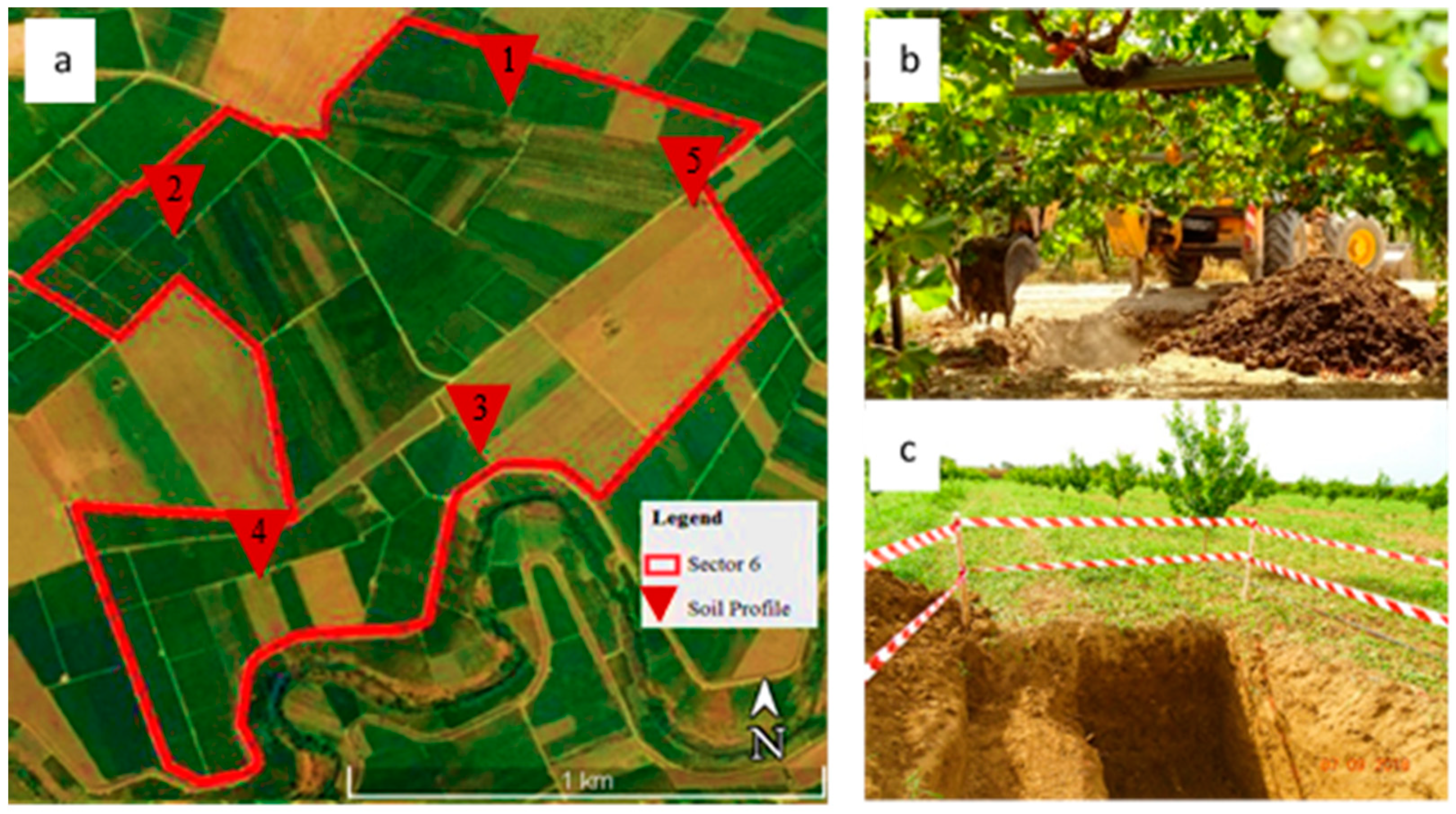
2.3. Soil Characterization in Sector 6
In order to define the pedological and hydraulic characterization of soils, five sites were selected. A pit was dug (
Figure 4) for each profile and a pedological description was carried out. For each soil horizon, disturbed soil samples were collected to determine soil texture. Particle-size analysis was carried out using the hydrometer method combined with sieve analysis to characterize the range of particle diameter from 2 up to 2000 μm [
8]. Sand, silt, and clay contents were expressed as percentages by mass of the fine-soil fraction (<2 mm) and soil texture was identified according to the United States Department of Agriculture classification (USDA).
Pedological descriptions and textural data for each soil profile are given in
Table 1.
Hydraulic properties of each horizon for each profile were determined by both field and laboratory methods. As for the shallower horizon, field infiltration measurements were carried out using a tension disc infiltrometer from Soil Measurement Systems (Tucson, AZ) [
9,
10,
11] with a 20 cm-diameter disc, covered with a highly permeable nylon membrane.
Each sequence of infiltration runs at a given location started with the lowest supply potential, increasing stepwise to the highest. Care was taken when setting up the instrument not to disturb the surface on which a thin layer of moist fine sand was applied at each measurement location as a patch with a diameter equal to that of the infiltrometer disc. This smoothed out any irregularities of the soil surface and assured good contact between infiltrometer and soil.
The infiltrometer supply pressure heads were −10, −7 and −4 cm (water column). For each pressure head, the infiltration test lasted about 13–15 minutes. Before each infiltration measurement, soil samples were taken with steel cylinders near the measurement location to obtain the initial water content. Immediately after each measurement, another sample was collected directly below the infiltration disc to quantify the final water content, as well as bulk density.
In order to deduce simultaneously the water retention and hydraulic conductivity curves from the same infiltration experiment, the transient experimental infiltration data, with initial and final water content, were used for a parameter estimation method based on a numerical solution of the Richards equation [
12]. Specifically, in this study, the infiltrometer data were elaborated by the DISC code [
13].
At the deeper soil horizons, laboratory hydraulic characterization was carried out on undisturbed soil samples collected by using stainless steel cylinders (inner diameter of 7.6 cm and height of 7 cm). Before performing the hydraulic tests in the laboratory, the height of each core was reduced to the value of 4.0 cm. Each soil core was slowly wetted from below at different steps to obtain the saturation conditions. We then measured water content θ
s at
h = 0 by the gravimetric method and hydraulic conductivity K
s at θ
s by the falling-head method [
14]. The θ(
h) data points were measured using a sand-kaolin suction table. Water retentions were obtained at the following pressure heads: 1.0, 3.0, 7.0, 10.0, 15.0, 30.0, 70.0, 90.0, 130.0 and 180.0 cm (referring to the middle of the sample). We assumed that the average water contents actually corresponded to the indicated pressure head values [
15].
The disturbed uppermost part of each soil core was also used to determine the water content θ at h values of 30, 60 and 120 m by the pressure membrane apparatus. The hydraulic properties measured in the five soil profiles were extended to all the fields in sector 6 by using a simple Thiessen polygon technique.
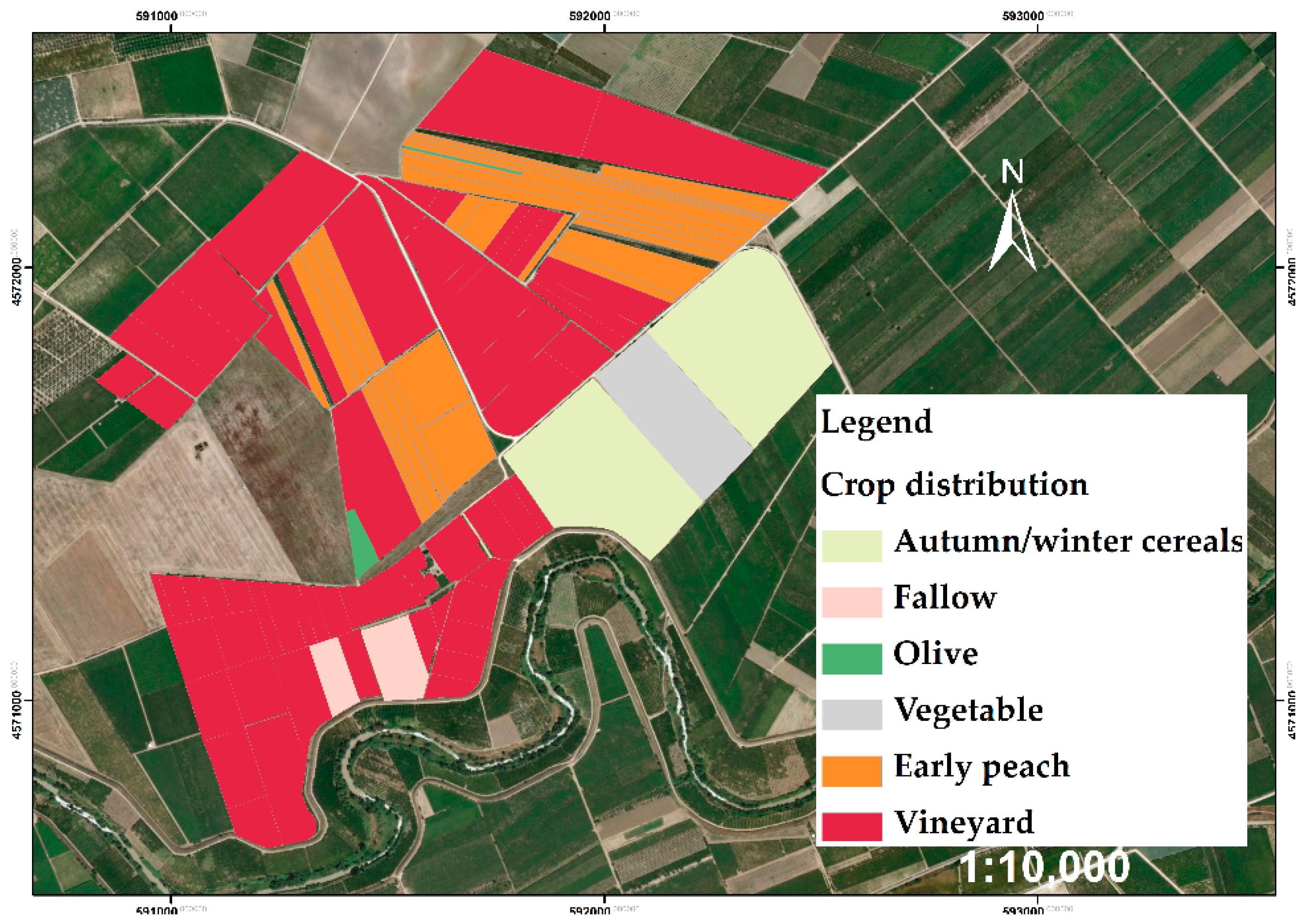
2.4. Crop Distribution and Actual Irrigation Volumes (Year 2016)
The most important species grown in sector 6 are grapevines, peaches and cereals.
Figure 5 shows the cultivated area and relative spatial distribution for the year 2016 (data were obtained from CBC). Vineyards cover almost half (46%) the total study area; fruit trees with mainly early peach account for one fifth of the total area (21%); table grapes, apricots and olives are present in a smaller fraction (2%).
From the recorded volumes in Sector 6 at hydrant level for the year 2016, the total water consumption of farmers was about 125,000 m
3. The distribution network of Sector 6 supplies water to 31 delivery hydrants, and covers a total cultivated area of 129 ha, of which 64 ha of vineyards consumed, according to CBC, more than 73,000 m
3 in 2016 (
Table 2).
However, the 30 ha of peach trees consumed more than 46,000 m3, amounting to 38% of total water consumption. N/A means Not Available
2.5. Evaluating Model Simulations by Direct Water Content Measurements
Model simulation reliability was evaluated by comparing simulation results with water storage monitored in the root zone in selected fields of the district by a proximal sensor based on the electromagnetic induction technique (EMI). EMI proximal sensors allow extensive surveys [
16]. The EMI sensors measure depth-weighted electrical conductivity (the so-called apparent electrical conductivity, ECa), integrated up to a soil depth depending on both the type of sensor used and the configuration of the sensor coils. ECa depends on the soil profile distribution of water electrical conductivity, σ
w, volumetric water content, θ, tortuosity, τ, of the soil pore system, as well as on other factors related to the solid phase such as bulk density, clay content and mineralogy. Consequently, separating the effect of single soil properties (e.g., soil water) on ECa is no simple task (see for example, [
17,
18]). However, in two separate studies, [
19,
20] found spatial variation in soil water stored within the top 0.5 and 1.7 m to be highly correlated with the spatial variation in ECa measured with EMI sensors. Similar results were obtained by other authors (see for example, [
21]. These studies demonstrated that in soils with low salinity, measurements of soil ECa can be used for estimating soil water stored in the soil profile. Estimating soil water content using ECa readings requires a site-specific calibration relating EMI measurements to simultaneous water contents measured by a different standard reference method. In this sense, the time-dynamics of water storage in the selected fields was measured by a Diviner 2000 (Sentek Pty Ltd, Stepney, South Australia) capacitance sensor. A Diviner access tube was installed in three sites of each field up to a depth of 1 m. The Diviner 2000 is a capacitance device consisting of a single sensor fitted to a square rod which can be lowered in a PVC plastic access tube (5.1-cm “i.d.”, 5.6-cm “o.d.”) [
22].
In the same three calibration sites, the ECa was measured in both horizontal coplanar (HCP) and vertical coplanar (VCP) orientation by a CMD-Miniexplorer (GF Instruments, Brno, Czech Republic). The CMD operates at 30 kHz frequency and has three receiver coils with 0.32, 0.71 and 1.18 distance from the transmitter coil. The sensor has to be rotated 90° to change the orientation from VCP to HCP. According to the manufacturer, the sensor has an effective depth range of 0.5, 1.0 and 1.8 m in the HCP model, which is halved (0.25, 0.5 and 0.9 m) in the VCP mode. Thus, a single measurement allows six different ECa readings, each corresponding to a different depth exploration. Both the water content and ECa measurements were carried out at three times campaigns.
We tested which of the six ECa readings yields the best correlation with the total soil water storage in the 0–1 m depth soil layer. It was found that the 0.9 for VCP and 1.0 for HCP performed best. A simple linear regression accurately predicted the water stored in the profile (average of the three measurement sites in each field) at any time. Once calibrated, the CMD was used to monitor the evolution of the water storage in the root zone (0–80 cm) averaged over the whole field in a total of 12 monitoring campaigns.
3. Results and Discussion
In this paper, the FLOWS-HAGES model was applied twice for each farm: (1) to simulate the dynamics and distribution of water in the soil profile by assuming the irrigation time and volumes actually supplied by the farmer; (2) to simulate the dynamics and distribution of water in the soil profile by assuming that irrigation time and volumes were not decided by the farmer but calculated by the model. Water volume requirements from simulations—assumed to be the optimum—were compared to volumes actually delivered by the consortium, thus allowing an estimation of the irrigation efficiency both at field and district scale. Hereafter, labels MOD and ON-DEM will be used to identify respectively the results of the two simulations. Both simulations were carried out by assuming as natural top boundary conditions the rainfall and evapotranspiration data for the year 2016 recorded by a meteorological station located within the sector considered (data not shown here).
3.1. Irrigation Volumes Measured and Calculated by the Model
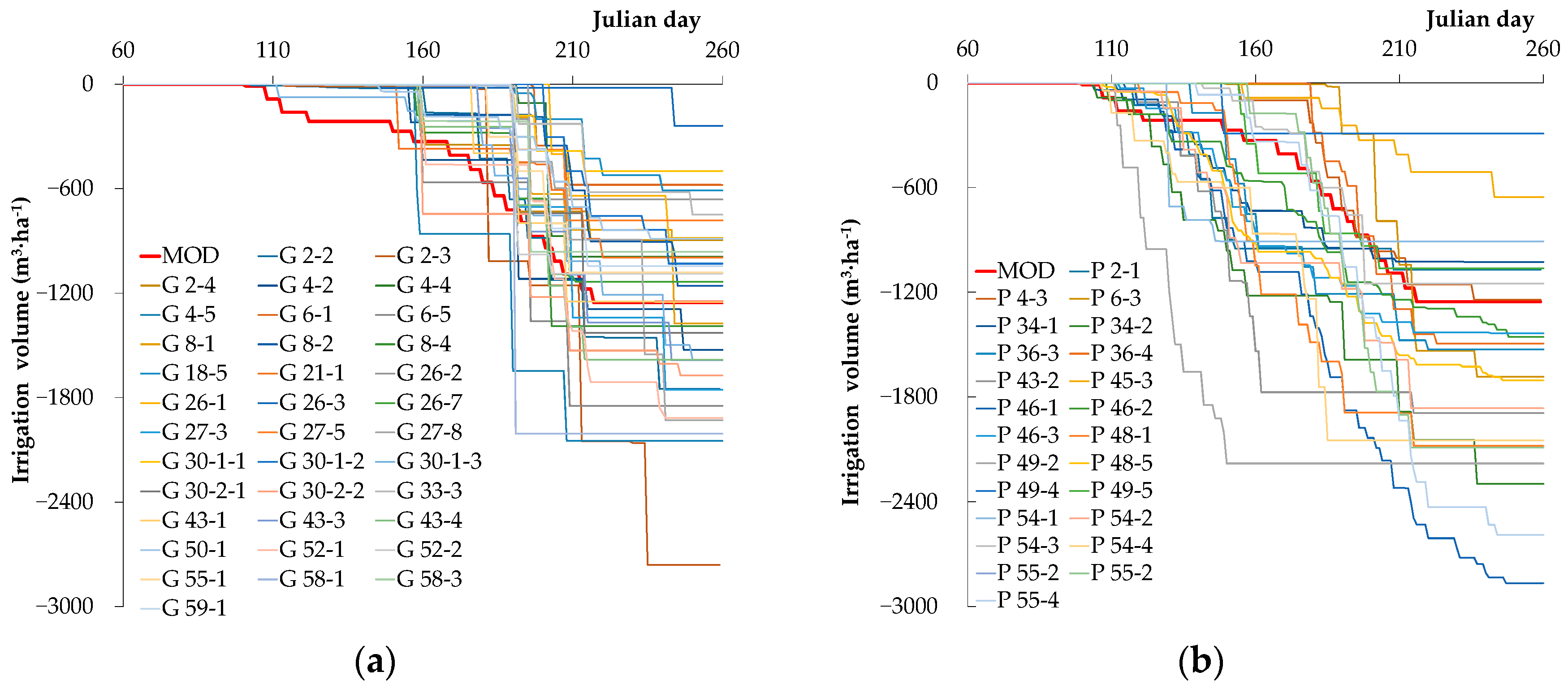
Figure 6a,b shows, respectively, the cumulative irrigation volumes for both grapevines and peaches, the most representative crops in the area. In the figure, the curves represent the irrigation volumes actually supplied by the farmers. The bold red line represents the curve calculated by the model. Changes in the slope of each curve indicate irrigation events.
What is immediately clear from the figures is the large variability in farmer behavior in irrigating the same crop. Besides the lowest volumes, which would suggest a likely use of private farm wells, the large range of cumulative irrigation values indicates that the farmer’s experience may be a rather misleading and erratic criterion to establish both the time of irrigation and the irrigation volumes. It is worth noting that the calculated irrigation volumes approximately represent the average behavior of farmers, assuming no variability in soil (or hydraulic behavior) in the irrigation sector.
Further details will be given below for some fields representing both crops, for the case of either lower or higher cumulative irrigation volumes than those calculated by the model. For these selected fields, water storage in the root zone (the 0–80 cm layer) simulated by the model were compared to those measured by using the EMI sensor.
Of course, if it is assumed that the model calculates irrigation times and volumes correctly, when the irrigation calculated by the model is lower than that applied by the farmer, this means that the farmer is using more water than necessary. By contrast, if the model estimates the need for more irrigation water than that applied by the farmer, then the farmer is inducing some stress, whose intensity will depend on the water volume actually applied by the farmer.
3.2. Irrigation Volumes, Pressure Heads in the Root Zone and Deep Percolation Fluxes
Regarding the grape crop, the farms identified as FARM 2-3-G and FARM 52-1-G were considered in our analysis of the cases of cumulative irrigation volumes lower and higher than those calculated.
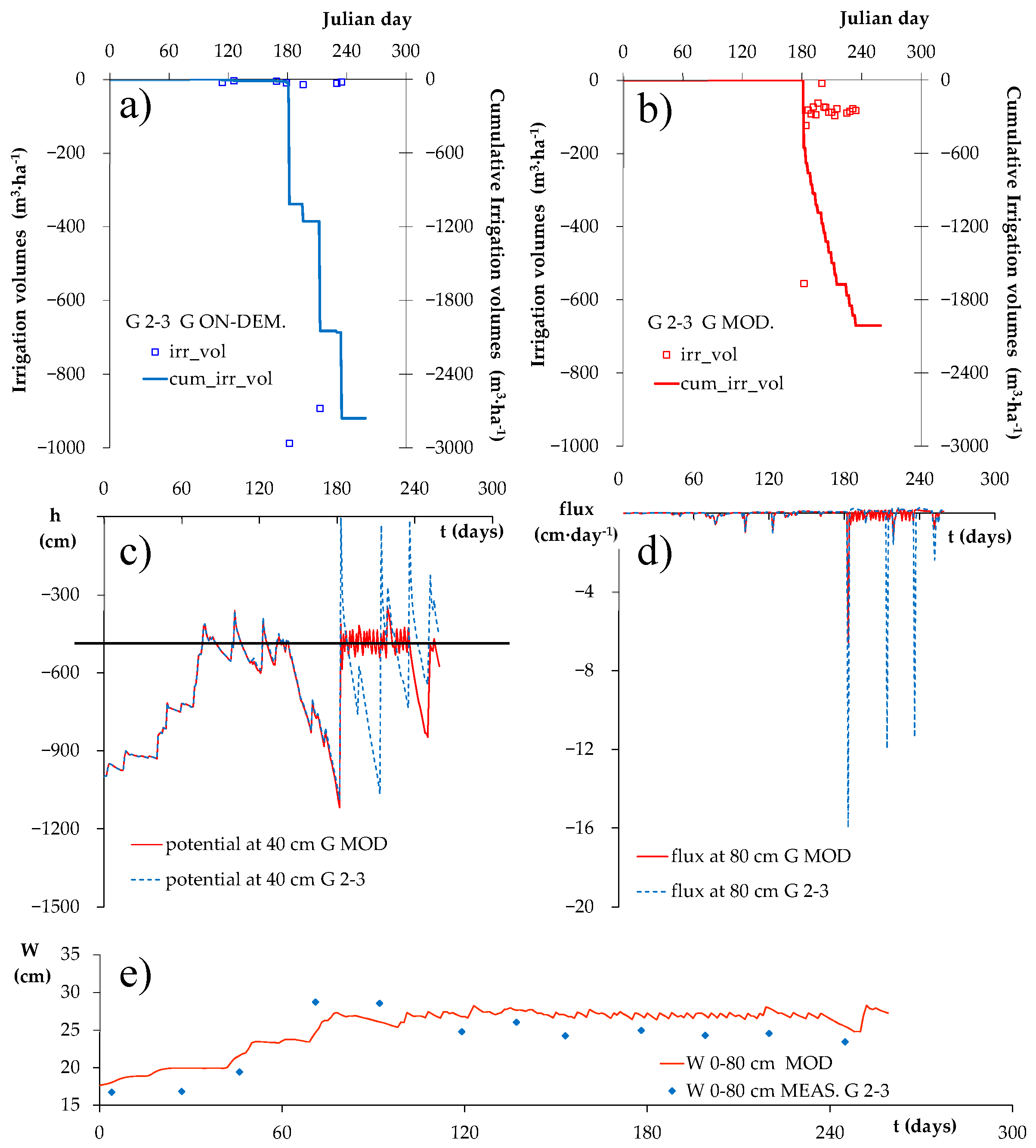
The graphs in
Figure 7a–d illustrate the irrigation volumes (both per single day and cumulative) calculated by the model (a), the irrigation volumes actually supplied by the farmer (b), the pressure head at 40 cm depth (c) and the percolation fluxes at 80 cm (d) for FARM 2-3-G. The depth of 80 cm was considered as the lowest depth for root uptake. In all the graphs, red and blue lines are used to identify respectively the MOD and ON-DEM simulation results. To demonstrate the goodness of the simulation results, the graph in
Figure 7e compares the time evolution of the water storage predicted by the model and that estimated from the EMI sensor ECa readings.
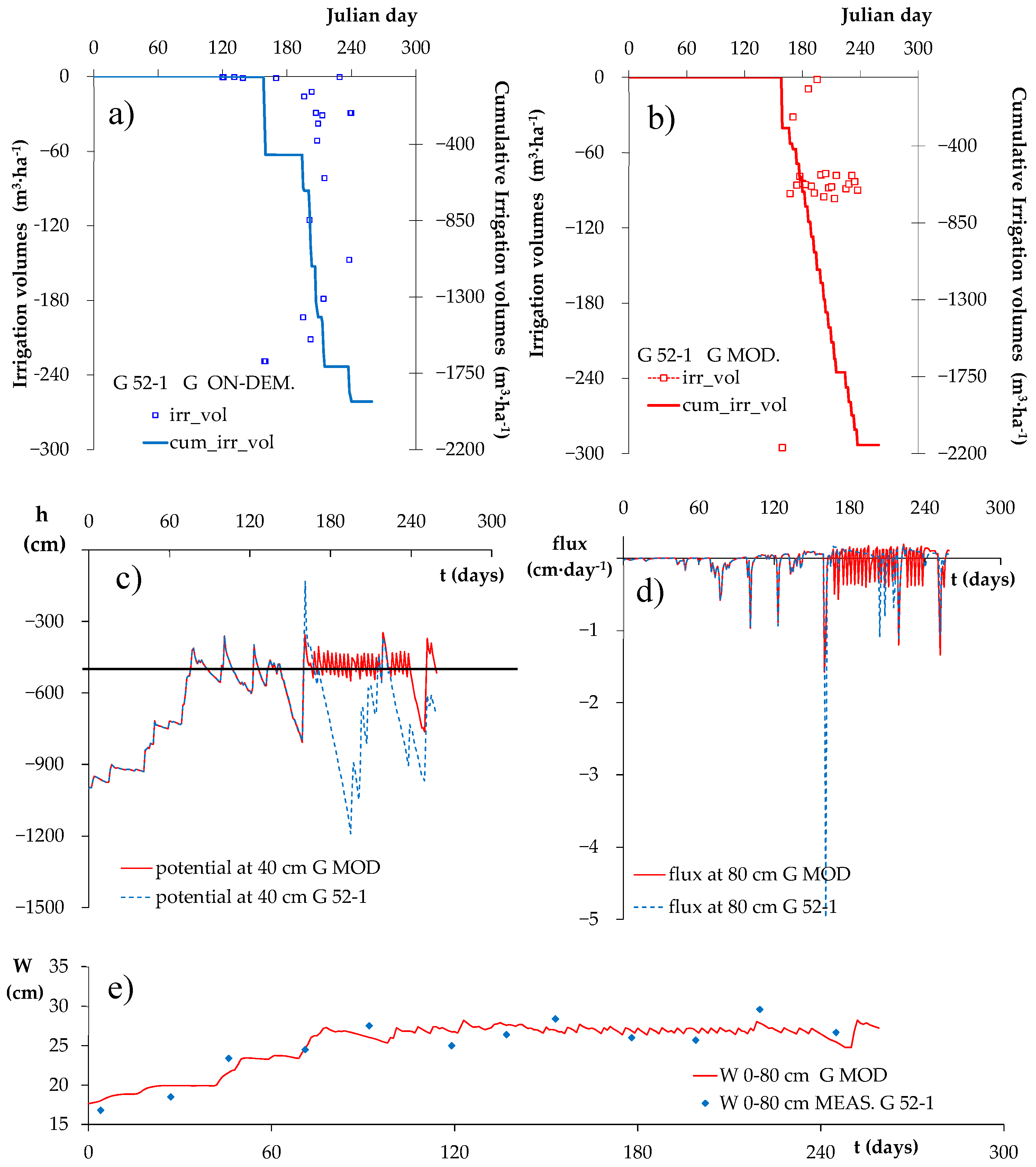
Figure 8a–e shows the same graphs for FARM 52-1-G.
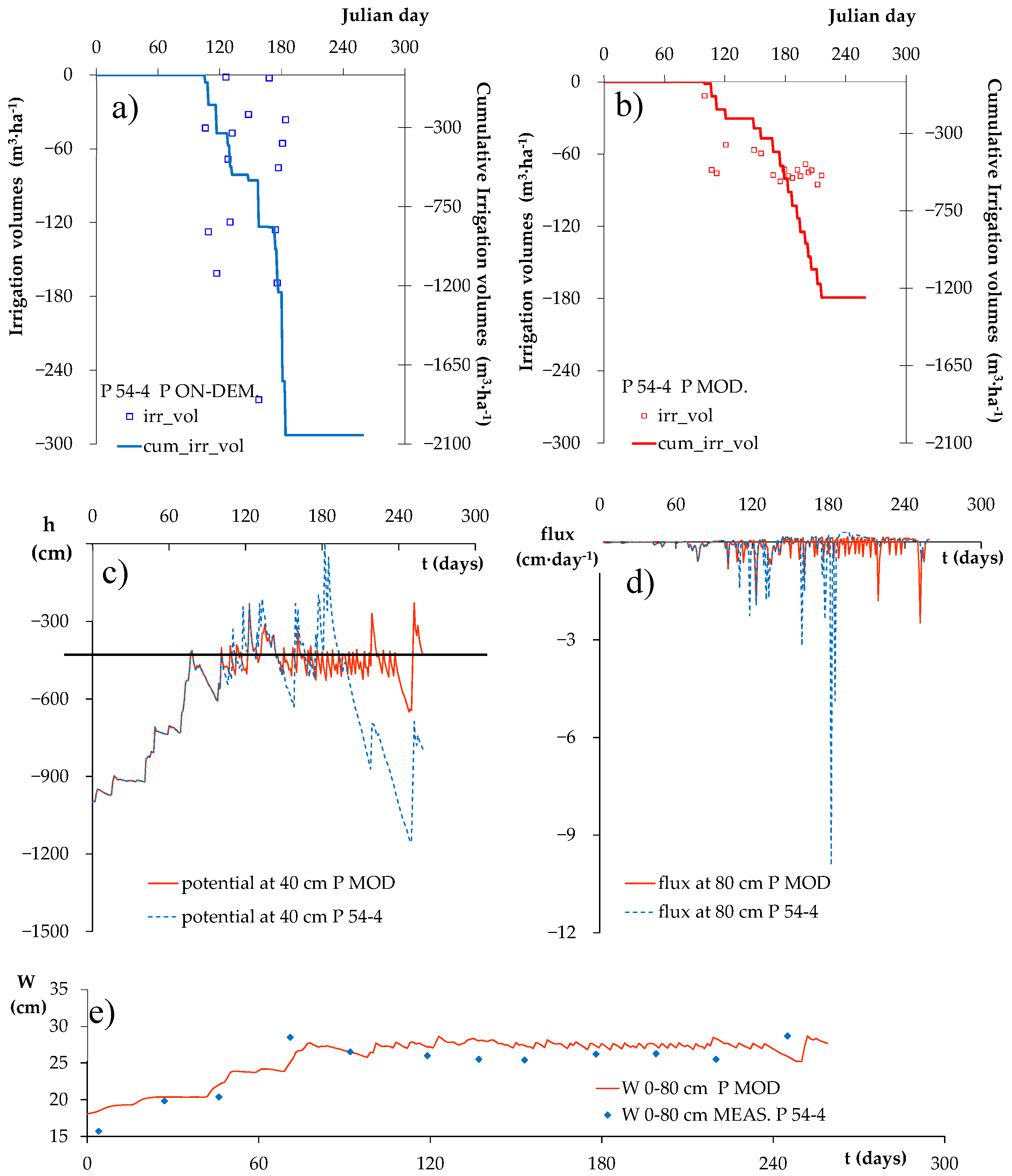
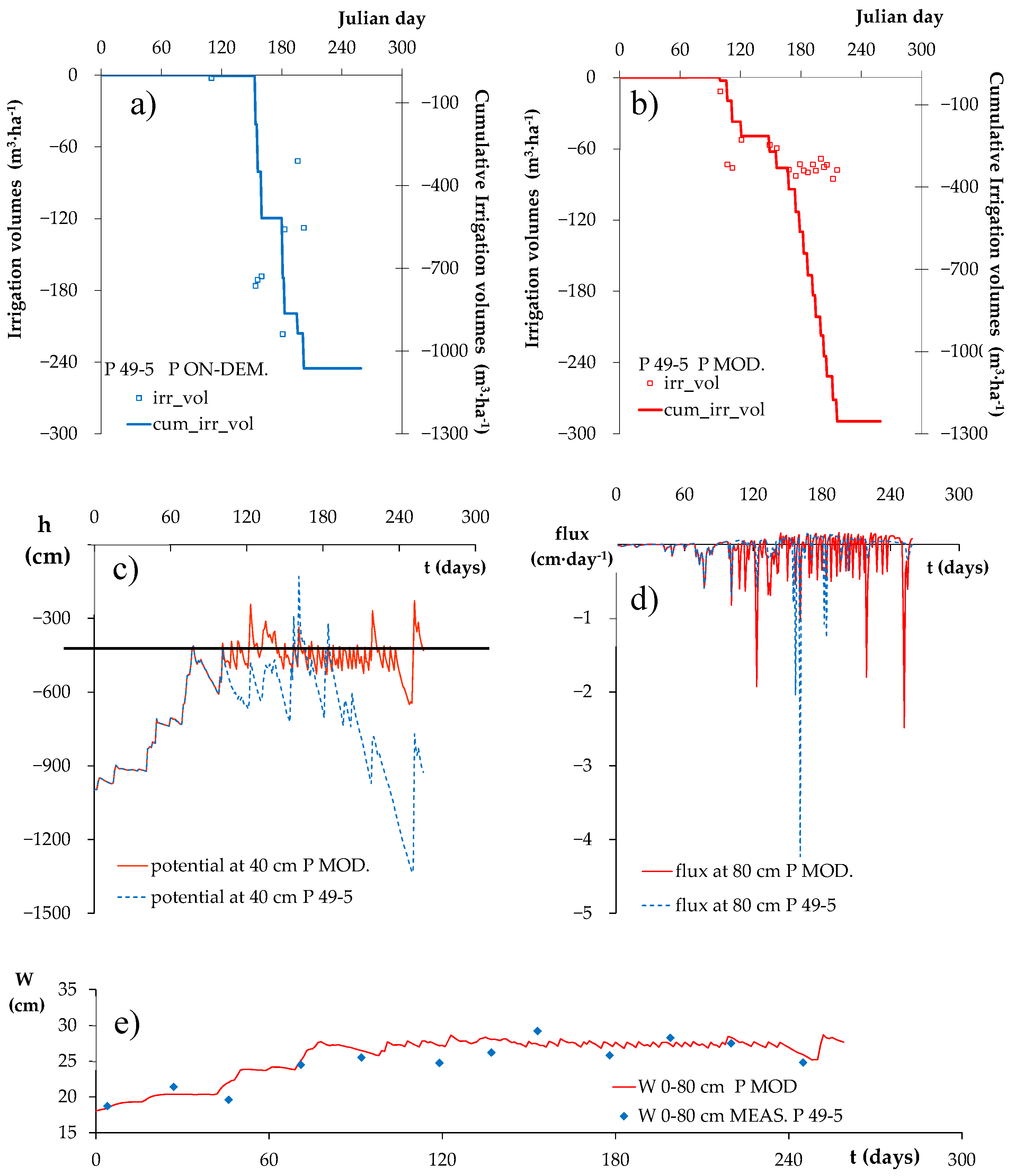
As for the peach crop, the farms identified as FARM 54-4-P and as FARM 49-5-P will be considered to analyze the cases of cumulative irrigation volumes lower and larger than the calculated ones.
Figure 9a–e and
Figure 10a–e show the graphs for the FARM 54-4-P and the FARM 49-5-P, respectively.
Irrespective of whether the farmer supplied more or less than the irrigation volumes calculated by the model, compared to the farmer, the model “would irrigate” more frequently with lower volumes.
In the graph of pressure heads, the horizontal line indicates the critical pressure head (hcrit) selected for the grape crop. It is interesting to see how the model allows the pressure head to remain regularly above the critical value, with frequent irrigation and low volumes applied. The low volumes have major implications in terms of overall discharge to be supplied at the head of the irrigation sector.
The MOD deep percolation fluxes may be either higher or lower than the ON-DEM, depending on the value of the cumulative irrigation volumes calculated by the model or actually supplied by the farmer. However, no general rule exists. For example, in the case of FARM 52-1-G, MOD irrigation volumes are higher than ON-DEM volumes, and yet deep percolation fluxes are comparable to those of ON-DEM. This may be explained by the fact that the farmer irrigates less frequently with higher volumes. This induces stress periods alternating with relatively large irrigation supplies, the latter leading to higher water contents (higher than the field capacity) and hence higher downward water fluxes due to the higher hydraulic conductivity.
3.3. List of Hydrants to be Opened and Efficiency Indices
The above discussion concerning some representative fields may be extended to the whole set of fields considered in the irrigation sector. The final result is the list of hydrants to be opened day by day during the growing season of a crop, along with irrigation volumes.
Table 3 reports this list for the grape crop.
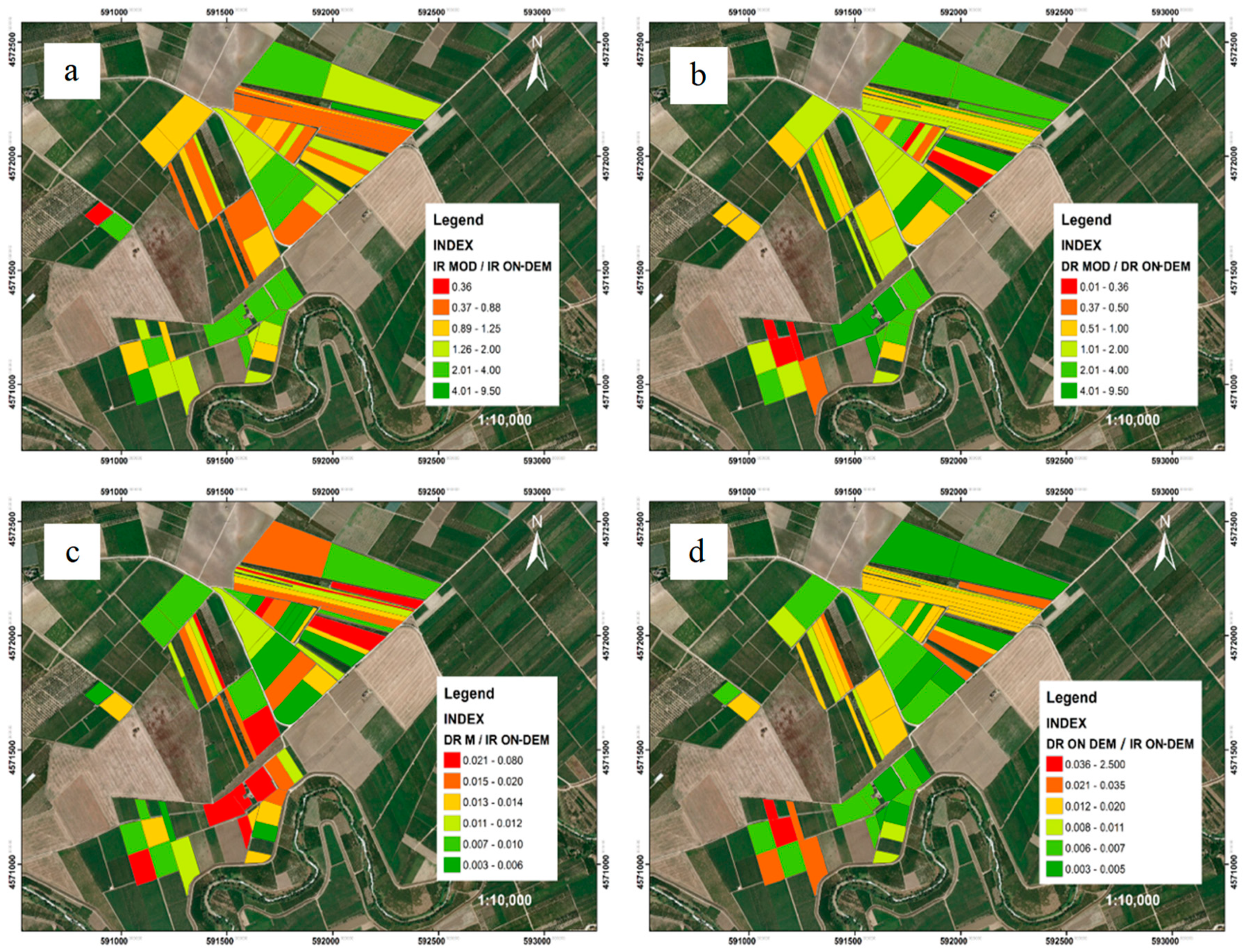
Based on the modeling results, the following indices may be mapped (see
Figure 11a–d).
1. Ratio of irrigation volumes model/irrigation volumes on-demand: A value >1 indicates that the irrigation volumes modeled exceed those supplied by the farmer. If it is assumed that the model calculates irrigation volumes correctly, this means that the farmer is causing some stress, which may have an impact on crop yield. By contrast, a value <1 means higher volumes applied by the farmer, thus indicating that the farmer is using more water than necessary and is causing undue water (and nutrient) losses.
2. Ratio of drainage volumes model/drainage volumes on-demand: this index gives a measure of the deep percolation fluxes in the case of MOD irrigation volumes compared to ON-DEM. The index tends to follow the same pattern as the first. However, this cannot be generalized as there are fields where considerable MOD irrigation volumes result in MOD deep percolation fluxes which are somewhat greater than those of ON-DEM, due to the higher irrigation frequency and lower volumes applied in the MOD case. In other words, this means that when the model calculates the irrigation volumes, the water content in the root zone is maintained low enough to keep the hydraulic conductivity low, thus reducing the fluxes downward. However, the water content is kept stably above the critical pressure head so that the crop can stably uptake the optimal amount of water without stress.
The last two indices give information on the fraction of the water lost by percolation fluxes below the root zone in the MOD and ON-DEM cases, respectively. Interestingly, in general with the MOD irrigation system, a lower fraction of water is lost to drainage. In other words, of the water applied, a larger part remains in the root zone available for root uptake. This is what is commonly called application efficiency, which is evidently related to the frequency of irrigation and volumes applied for each irrigation, an issue extensively discussed above.
4. Conclusions
The main objective of this paper was to describe the potential of an irrigation management tool to simulate district-level water use and scheduling over the course of an irrigation season. The tool is largely based on the use of mathematical models for the simulation of soil water movement in the unsaturated zone. This is a precise approach to rational irrigation and the key to saving irrigation water. Compared to other similar existing approaches, the soil water balance is calculated by solving the partial differential equation known as the Richards equation. Additionally, the tool takes into account the spatial variability of the soil hydraulic parameters.
The combination of a detailed mathematical model, which solves the Richards equation, with some method of handling the spatial variability is highly desired. In this sense, the model provides a way to establish the right frequency and amount of irrigation to keep the pressure head above the critical value by minimizing both the stress periods and the water (and nutrients) lost by deep percolation fluxes.
The tool, due to its increased requirements in specialized data, is not aimed at the farmer but rather at an organization that could provide irrigation advisory services to farmers. It is designed to support farmers in improving irrigation management at the farm scale.
The tool responds to the question of balancing the pressure from growing water demands and the need to increase agricultural resilience to climate change through irrigation. Reducing water losses in the agricultural sector, by far the biggest water consumer, is probably the single most important step toward a more efficient management of water resources. To achieve this goal, the first step is undoubtedly to empower managers and through them the farmers.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
