Case Study of Transient Dynamics in a Bypass Reach


Abstract
:1. Introduction
2. Theory
2.1. Governing Physics
2.2. Implementations in Delft3D
2.2.1. Physics
2.2.2. Numerics
2.3. Richardson Extrapolation
3. Materials and Methods
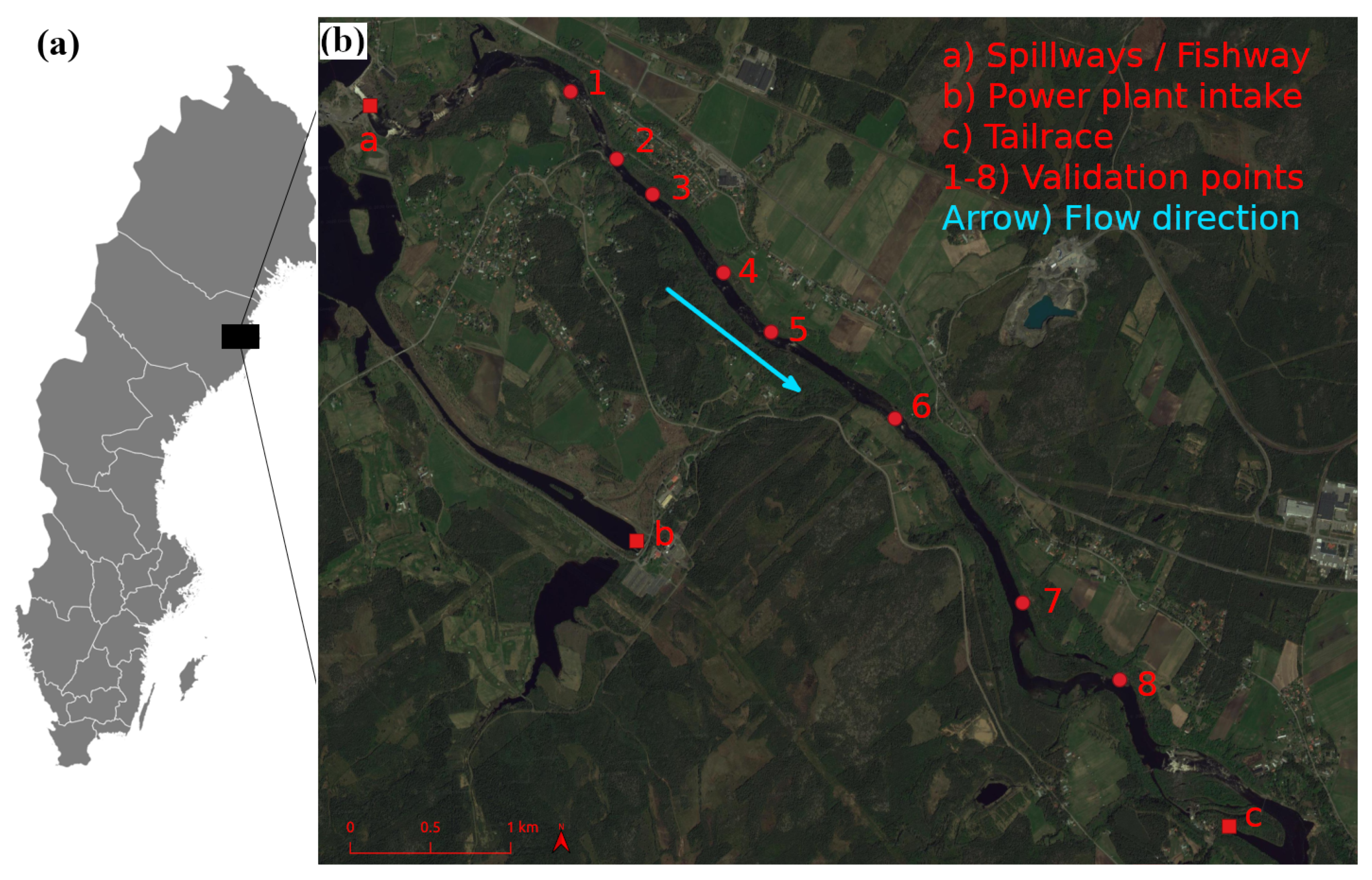
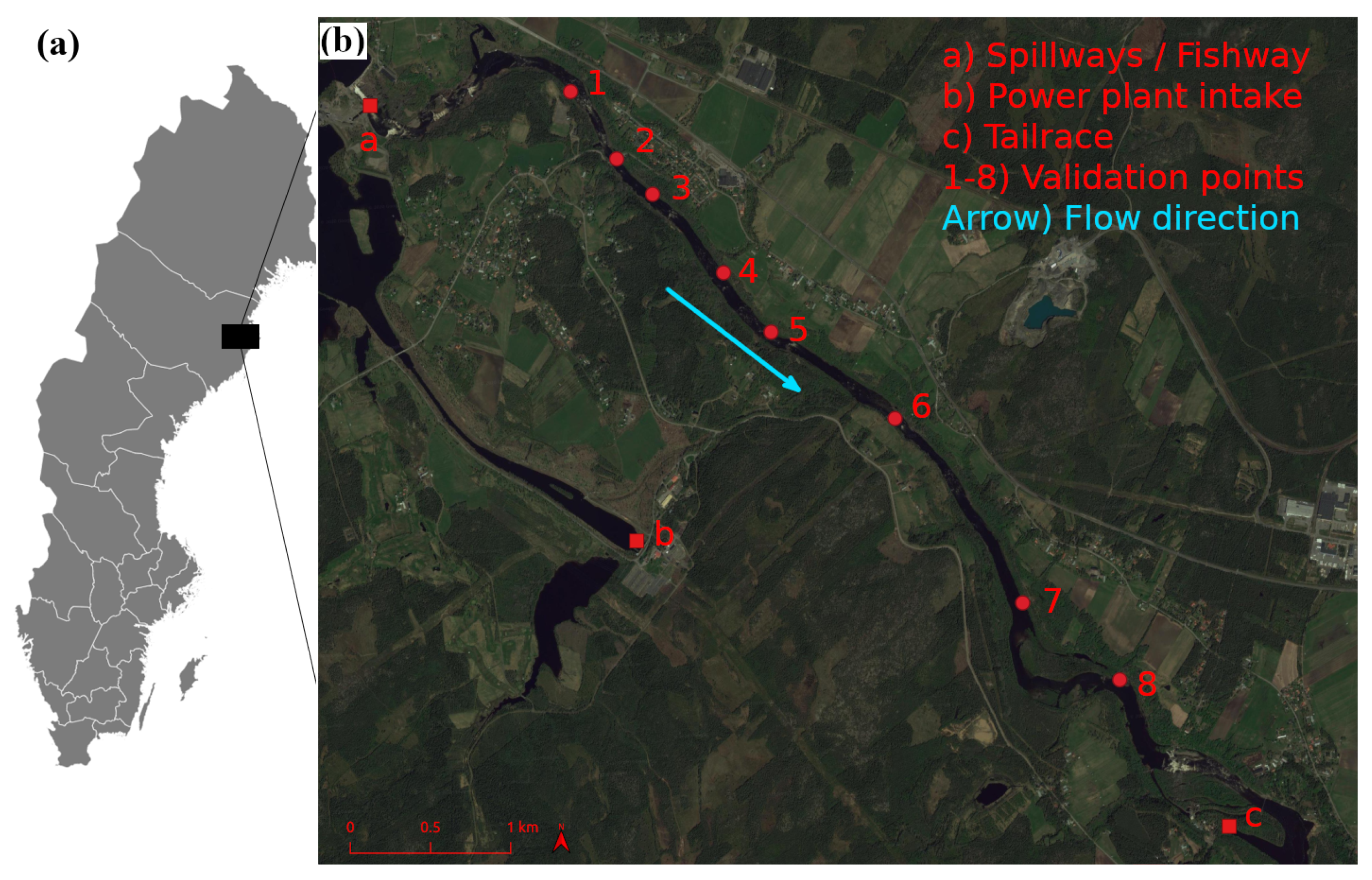
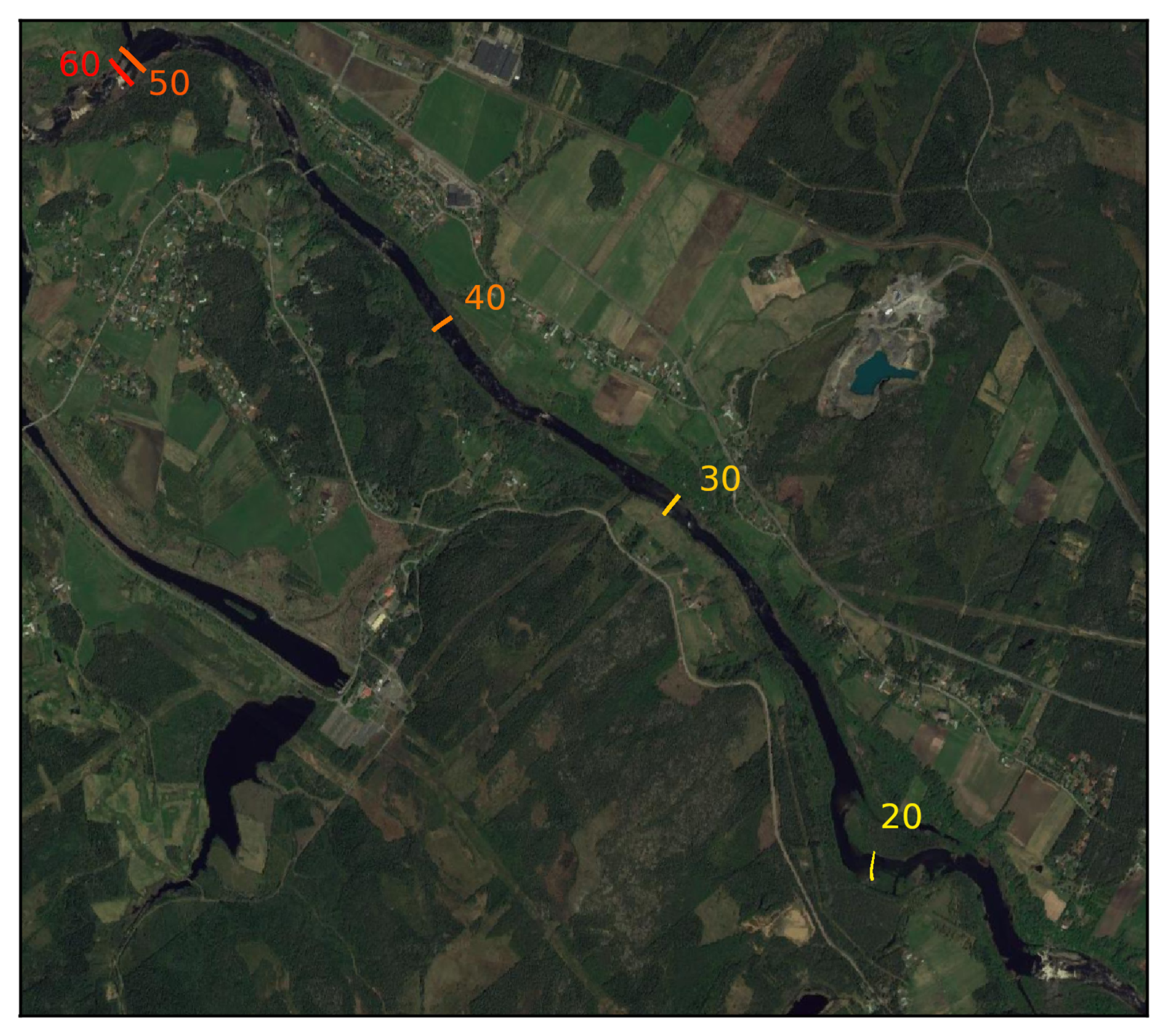
3.1. Study Site
3.2. Bathymetry and Depth Measurements
3.3. Scenarios
3.3.1. Hysteresis Scenarios
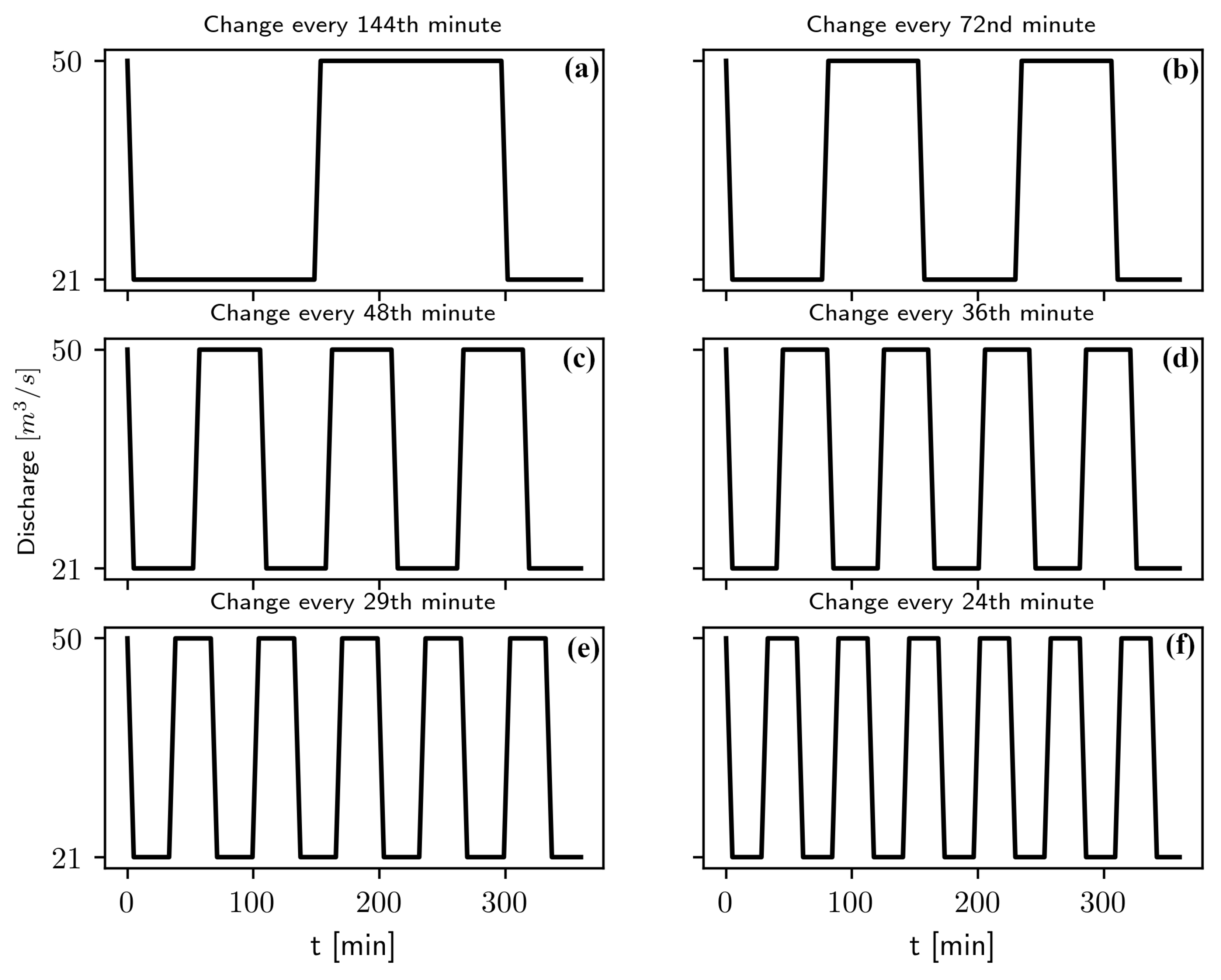
3.3.2. Hydropeaking Scenarios
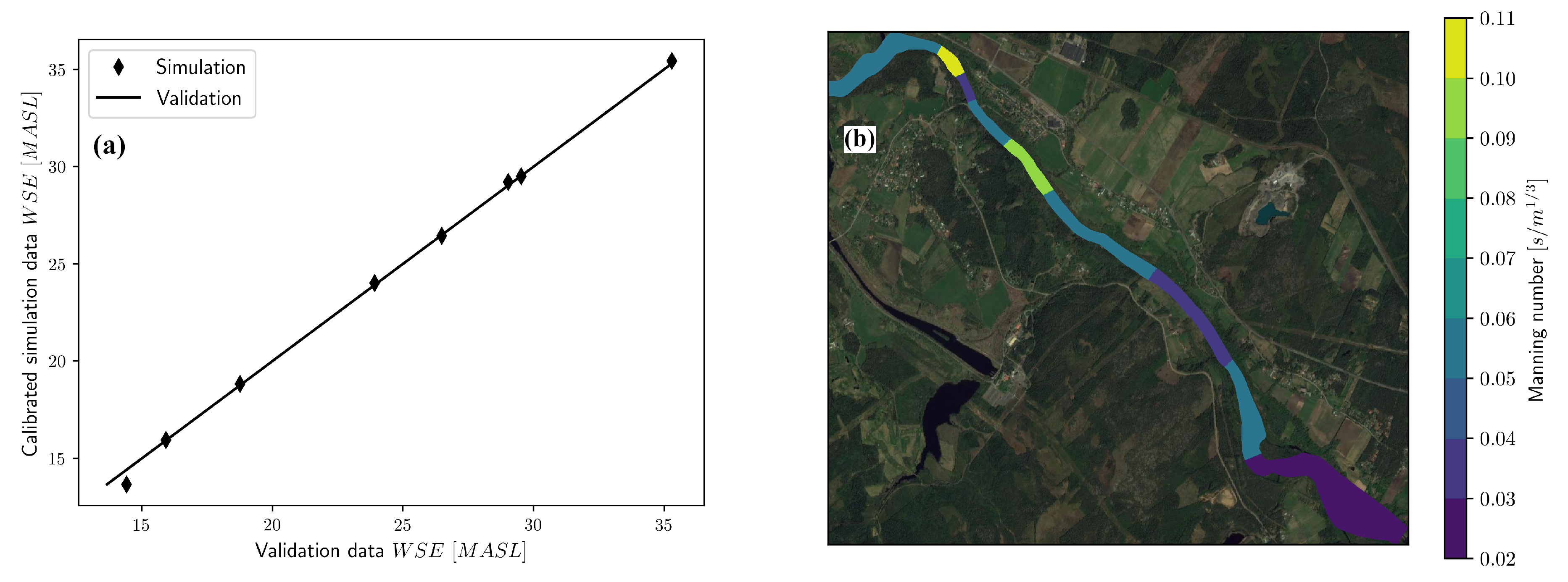
3.4. Calibration
3.5. Model Setup
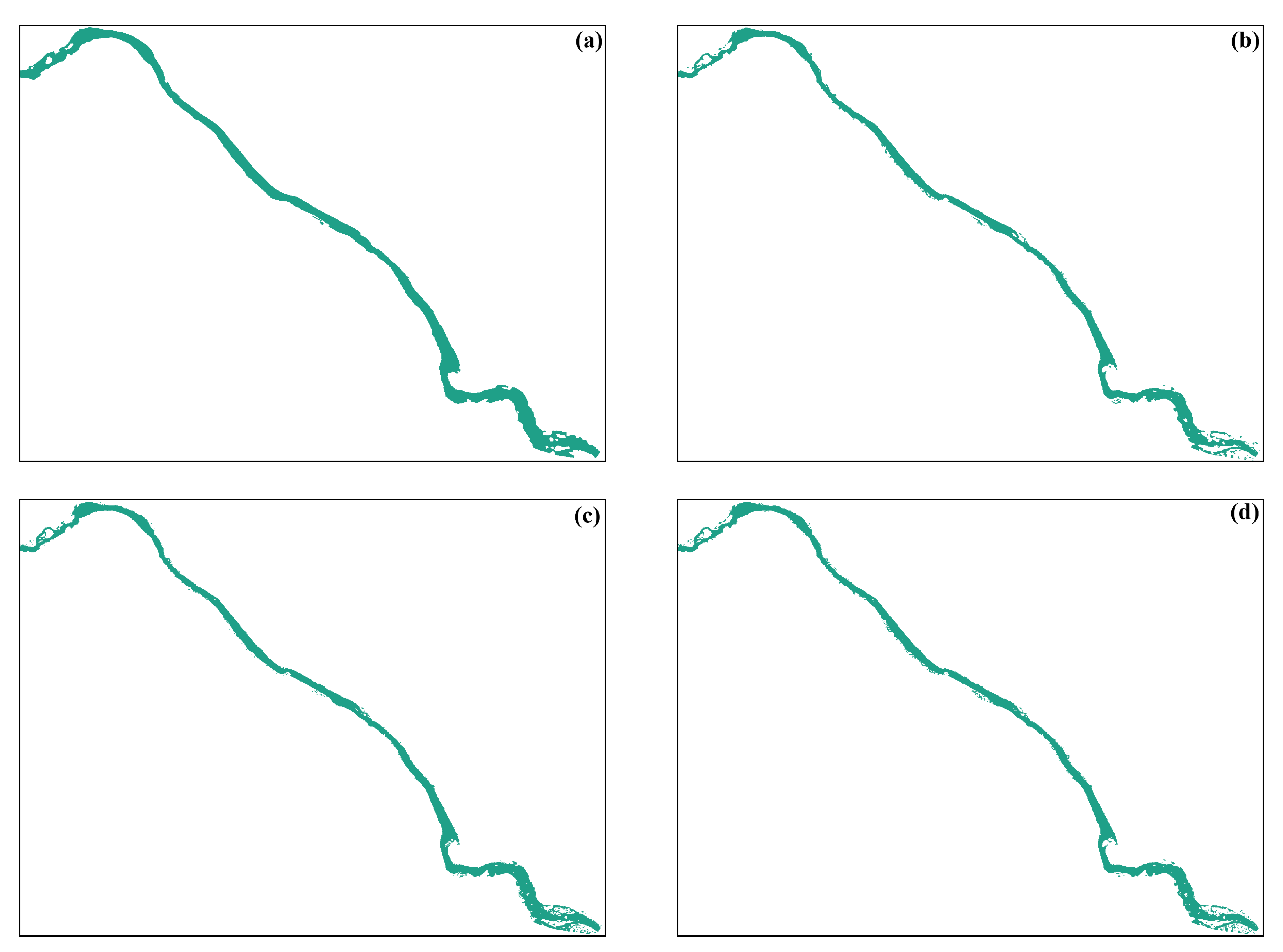
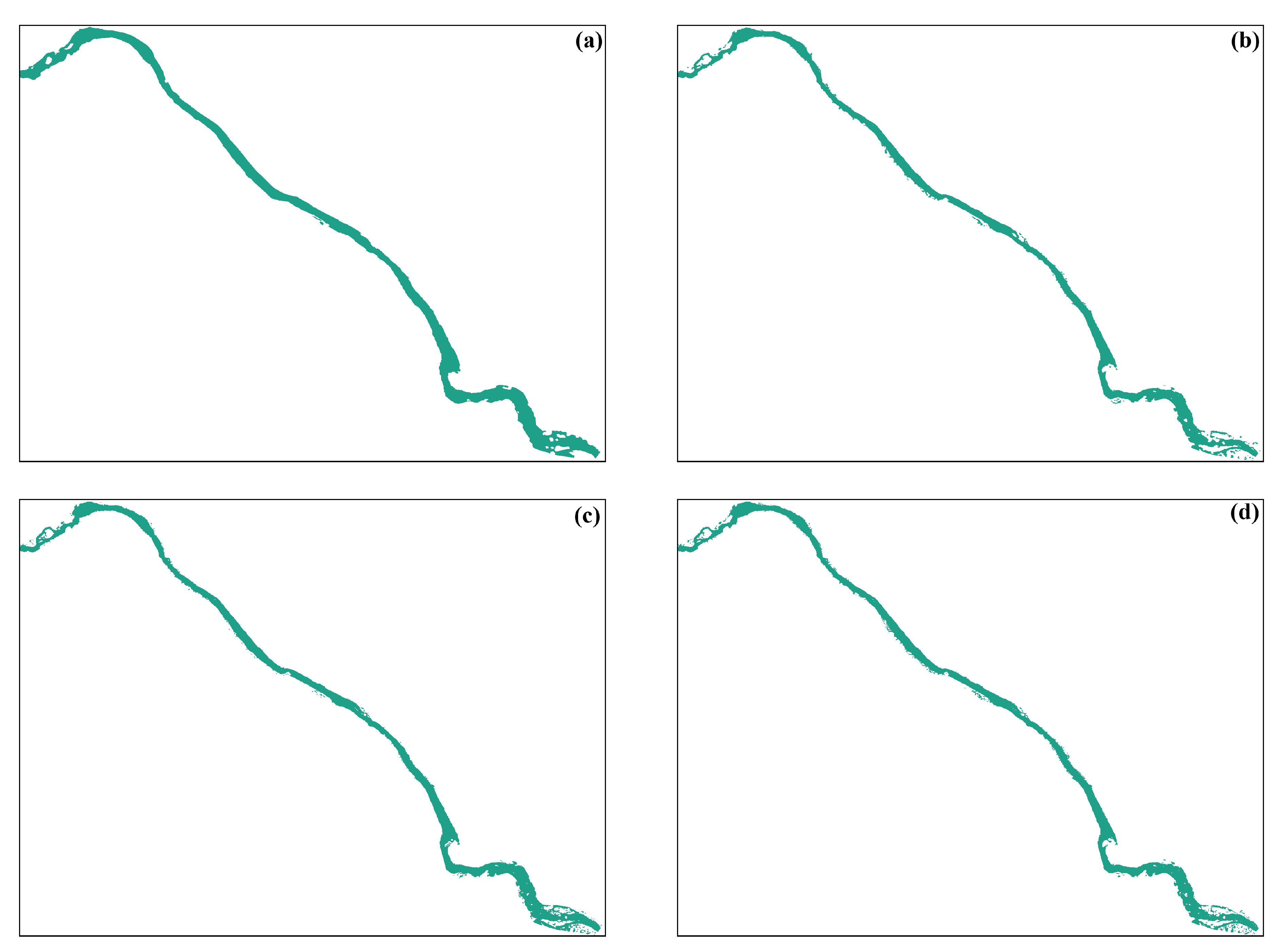
3.6. Wetted Area Calculation
3.7. Mesh Study
4. Results and Discussion
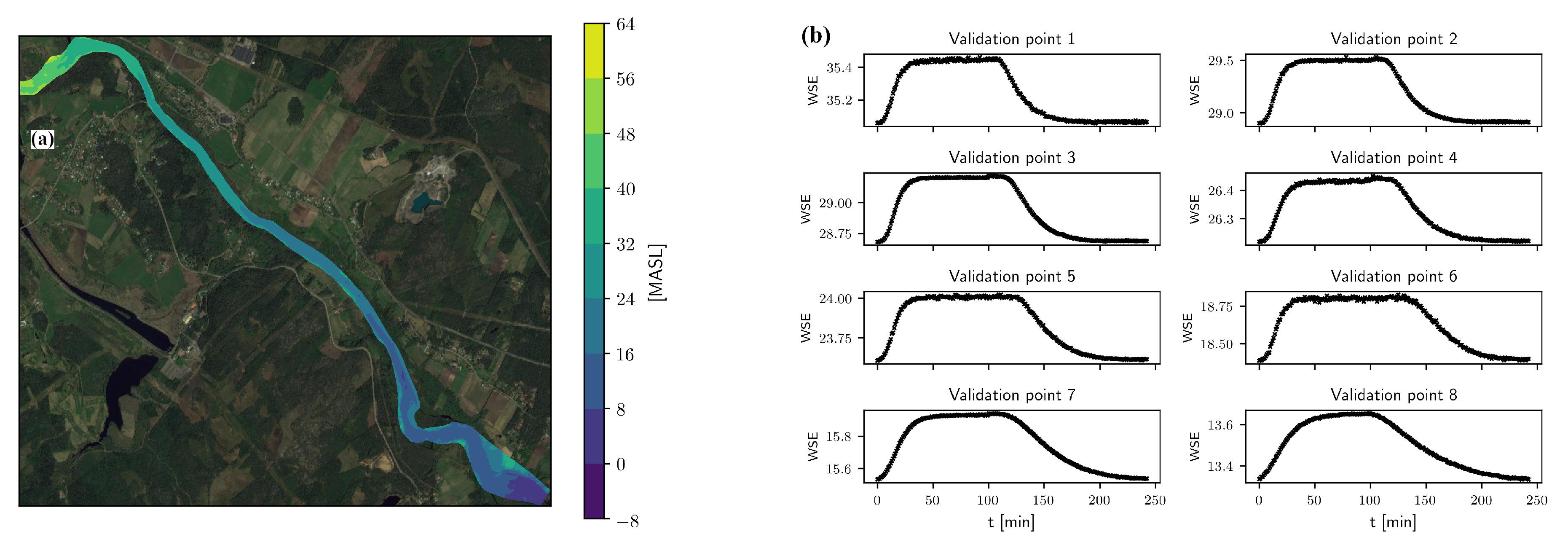
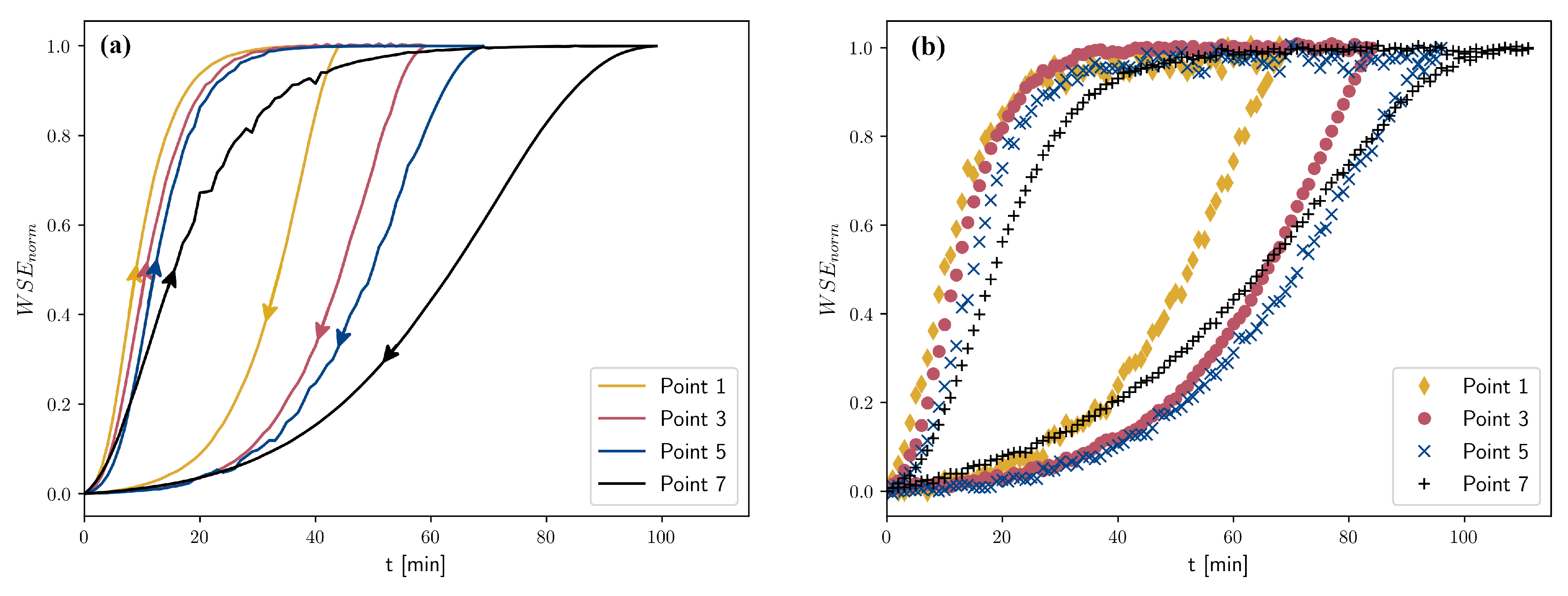
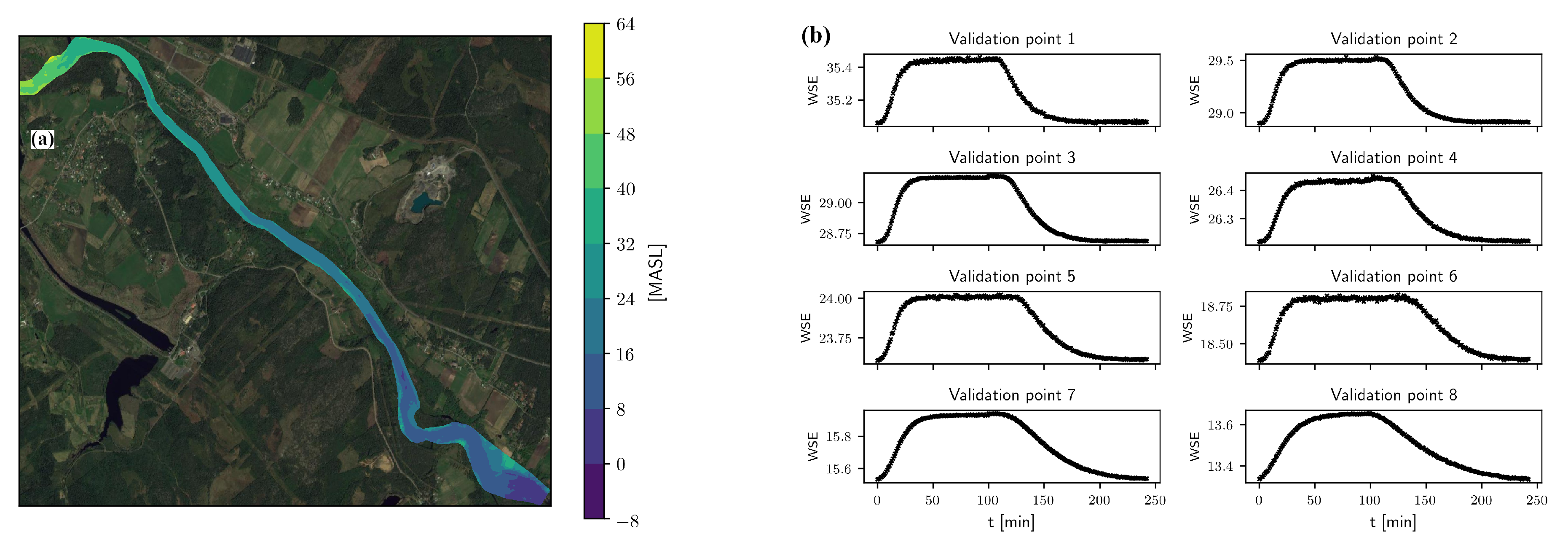
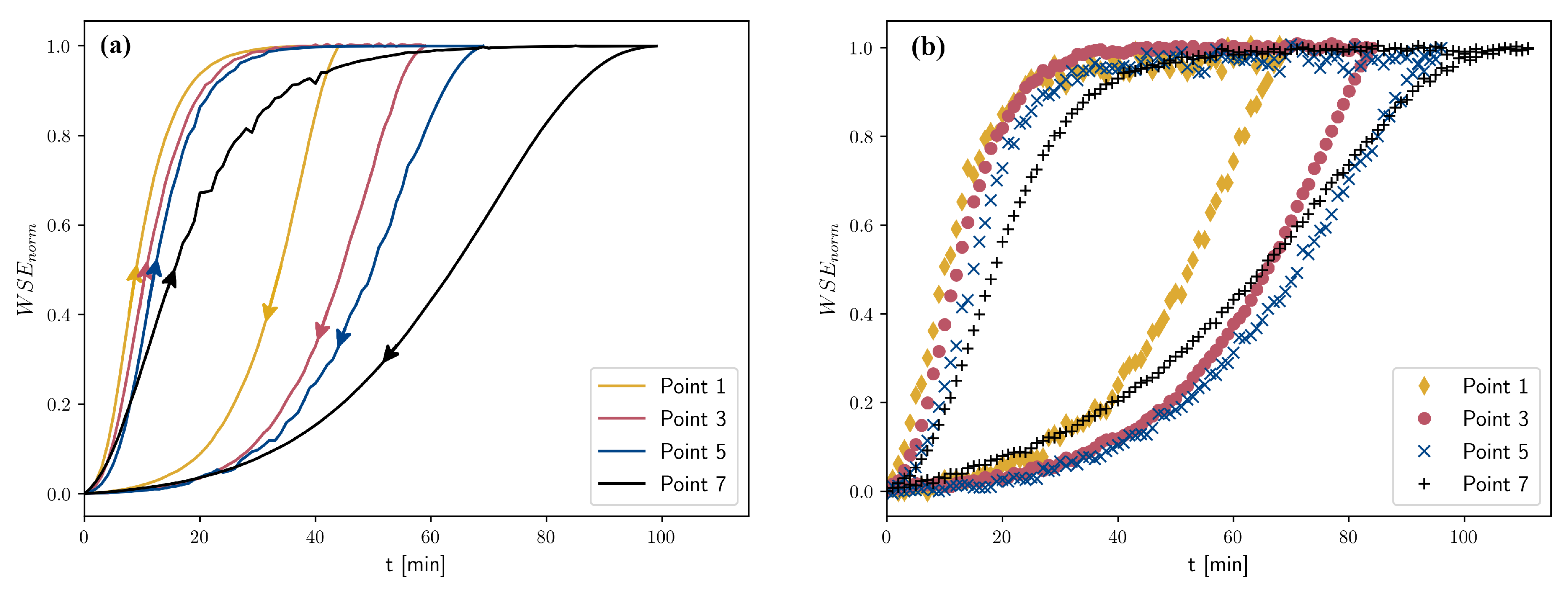
4.1. WSE Hysteresis
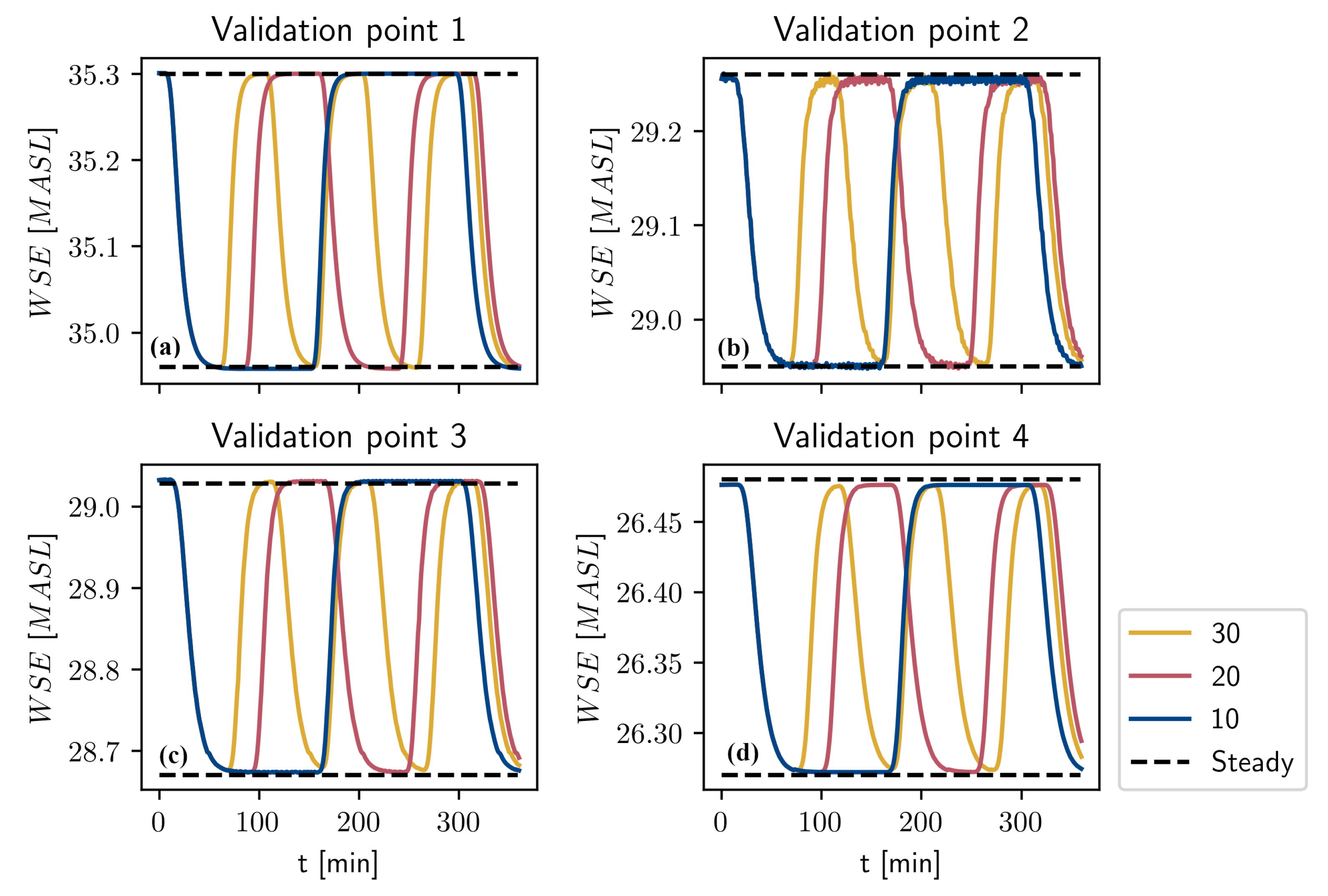
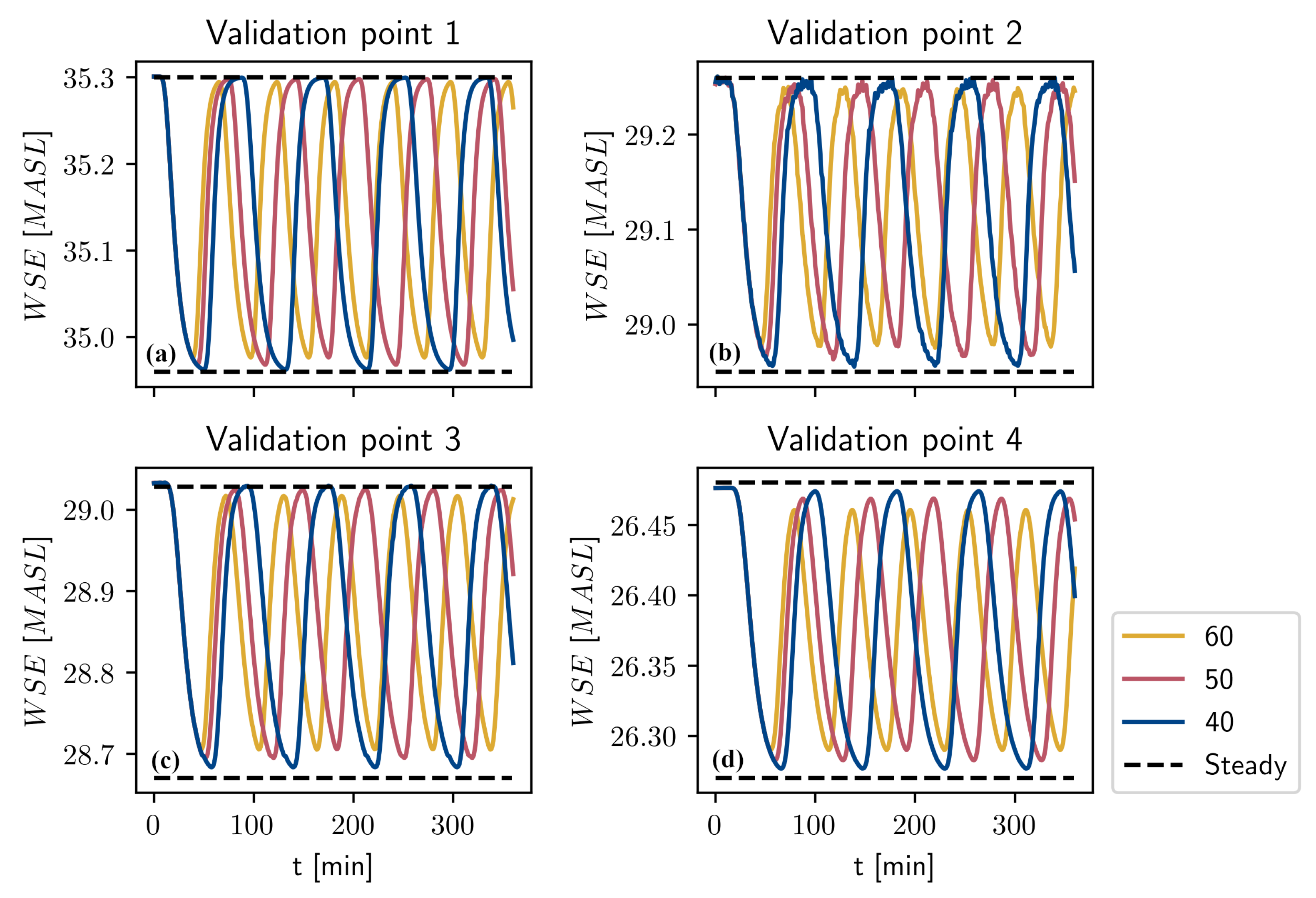
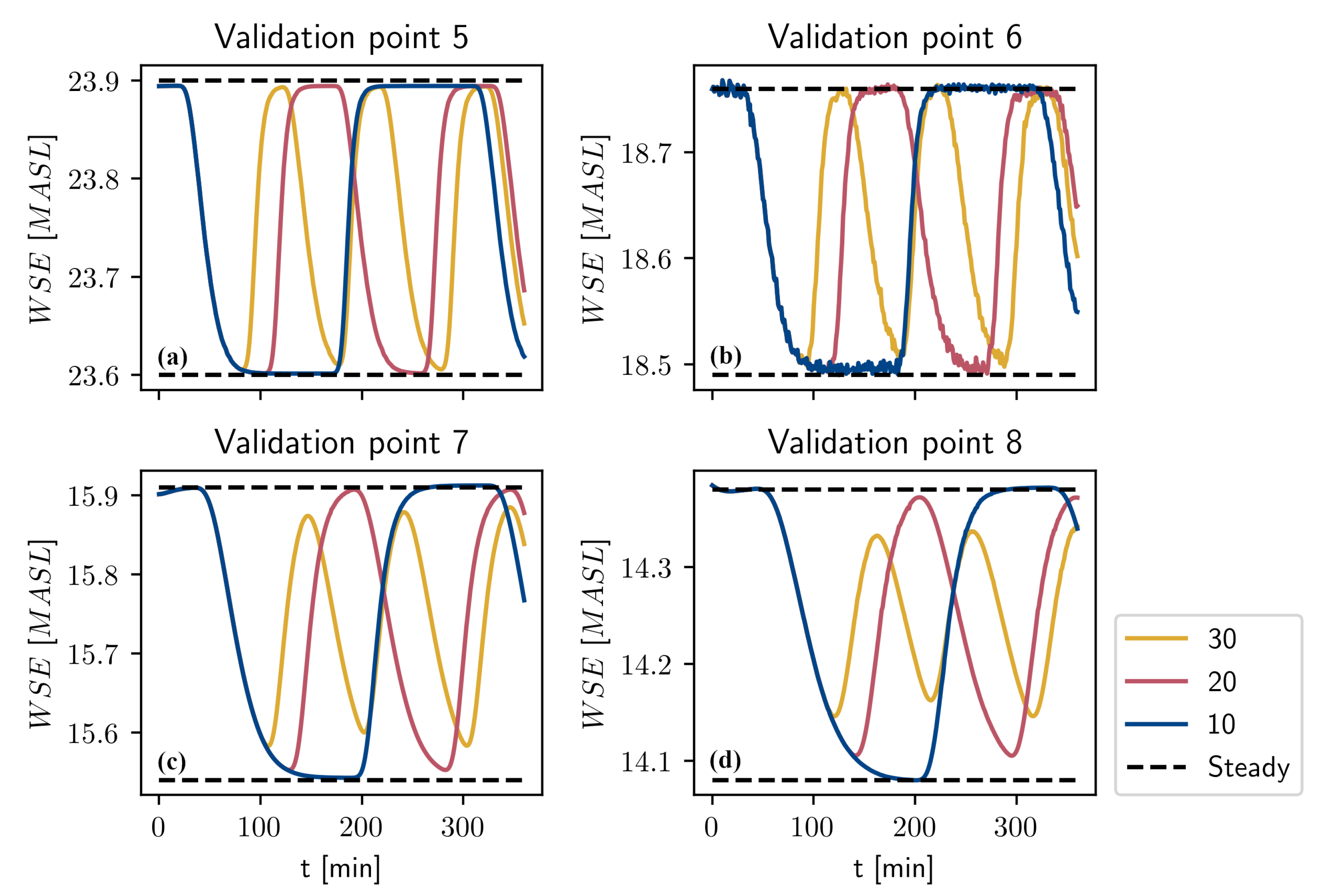
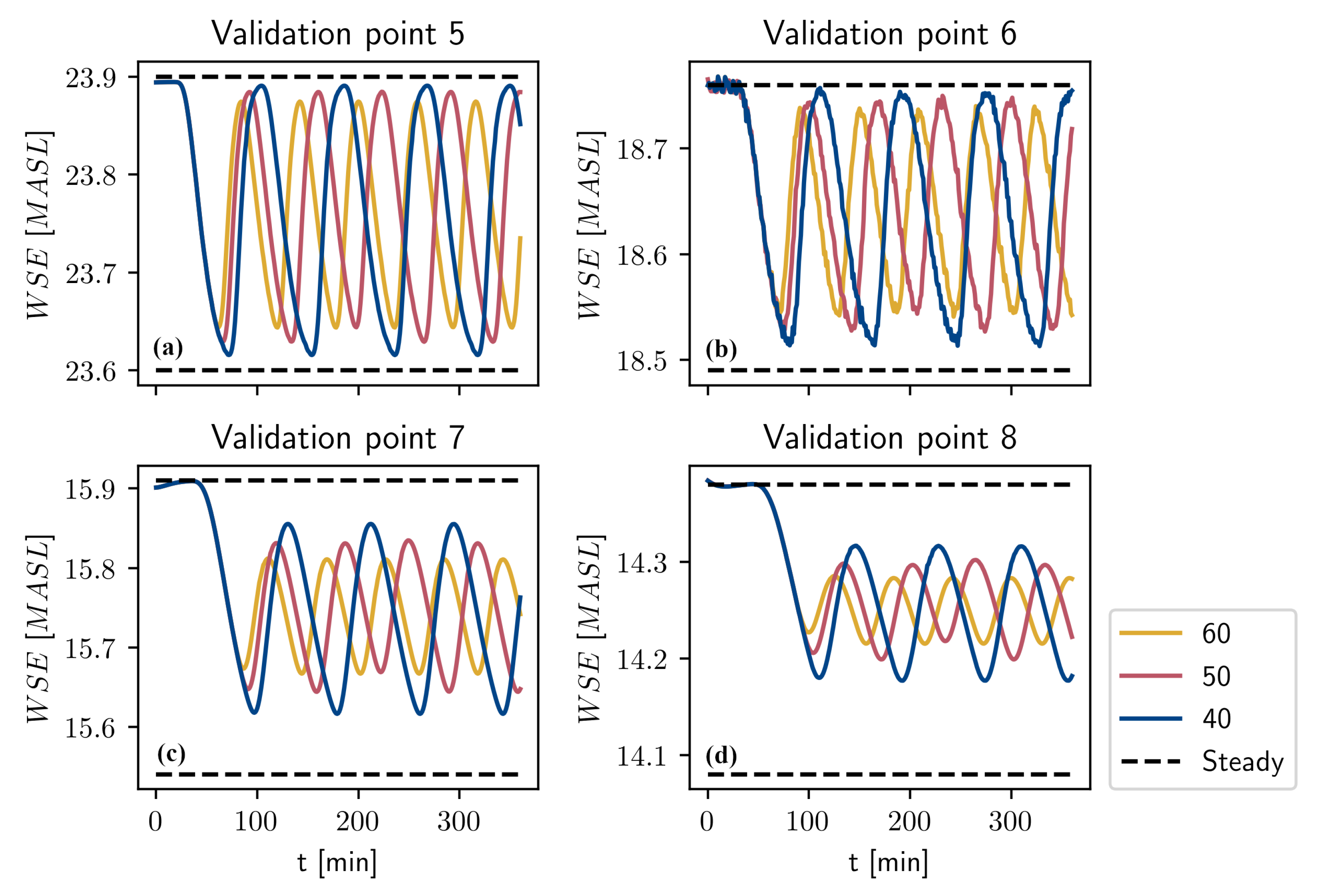
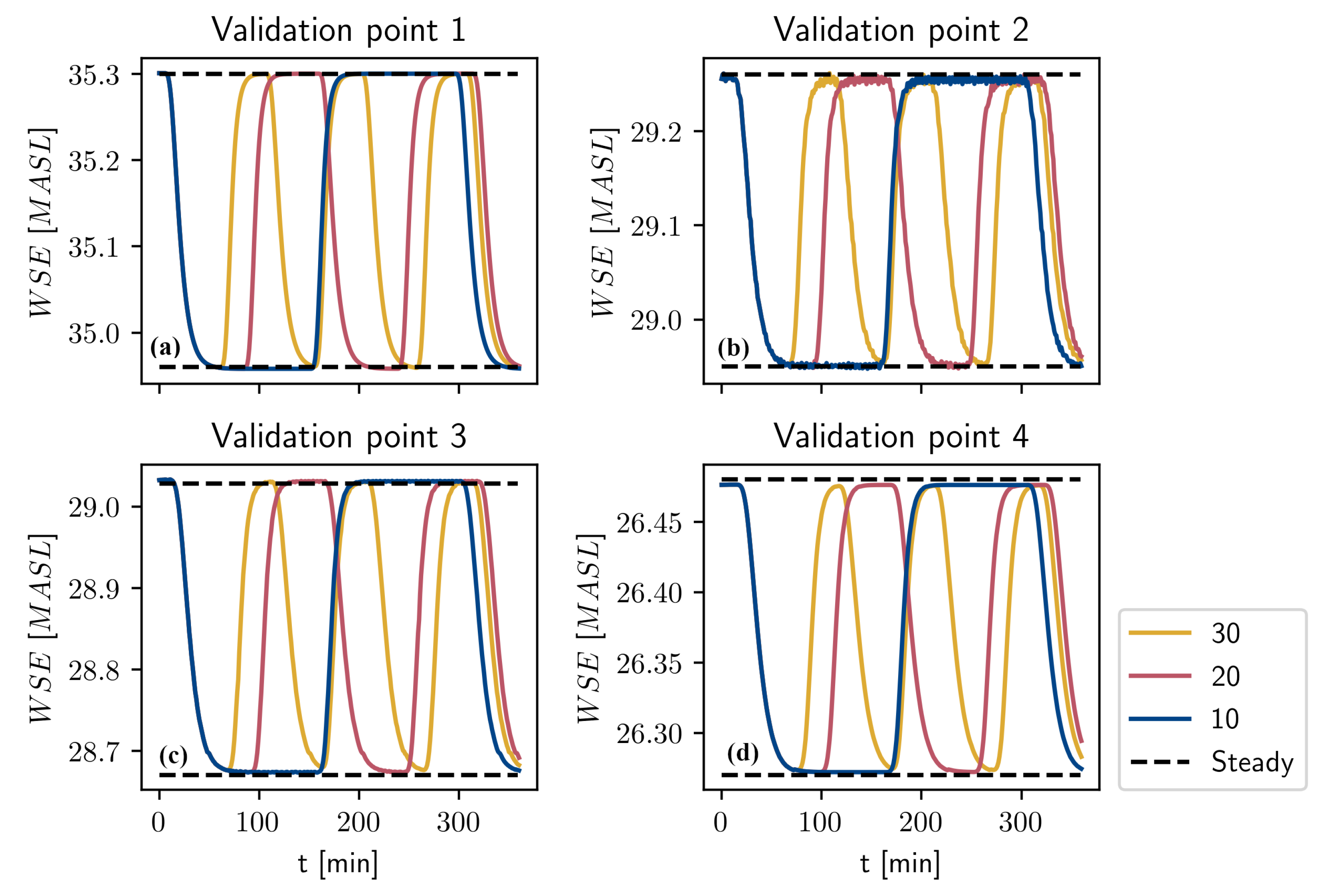
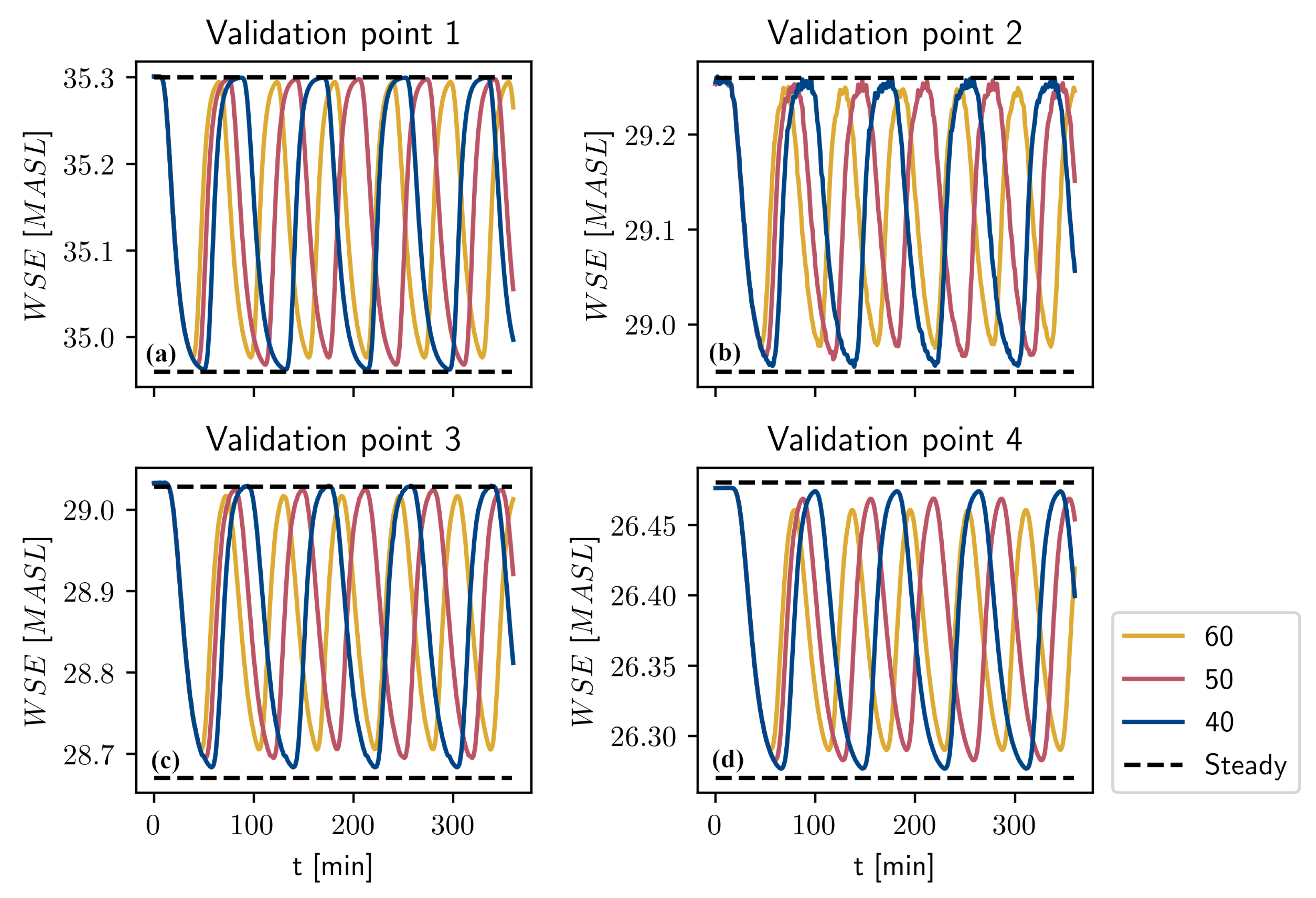
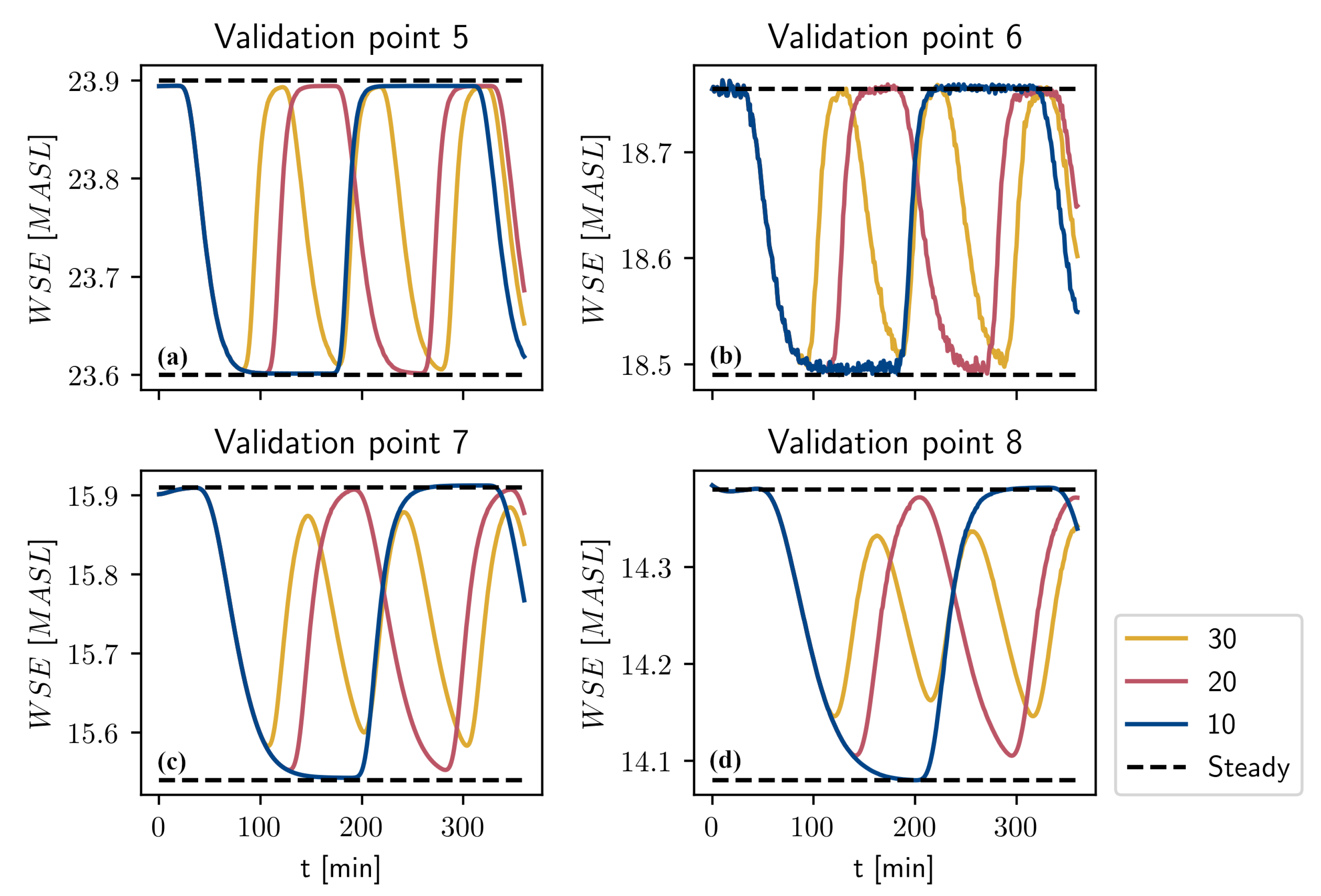
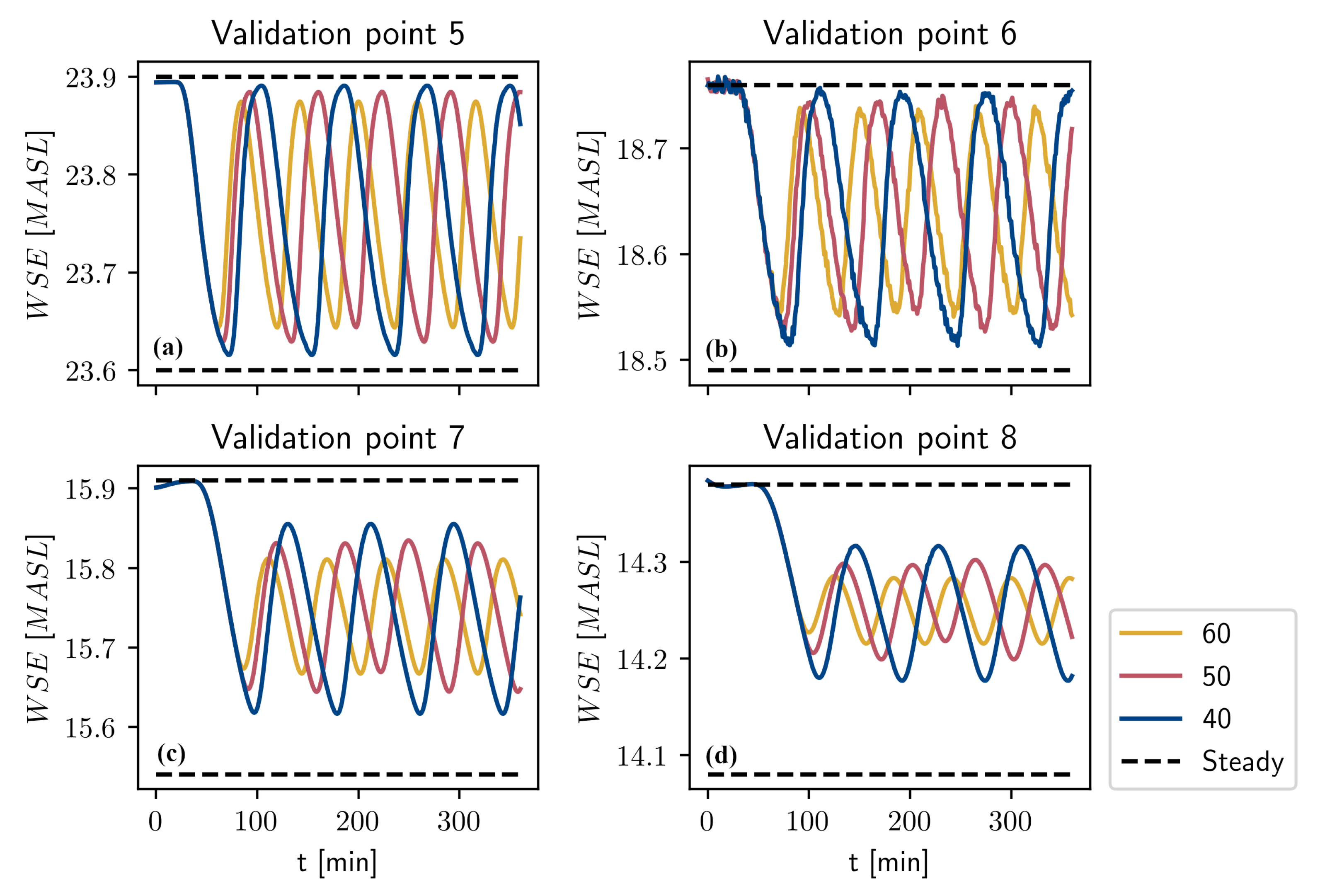
4.2. WSE Dynamics with Different Scenarios
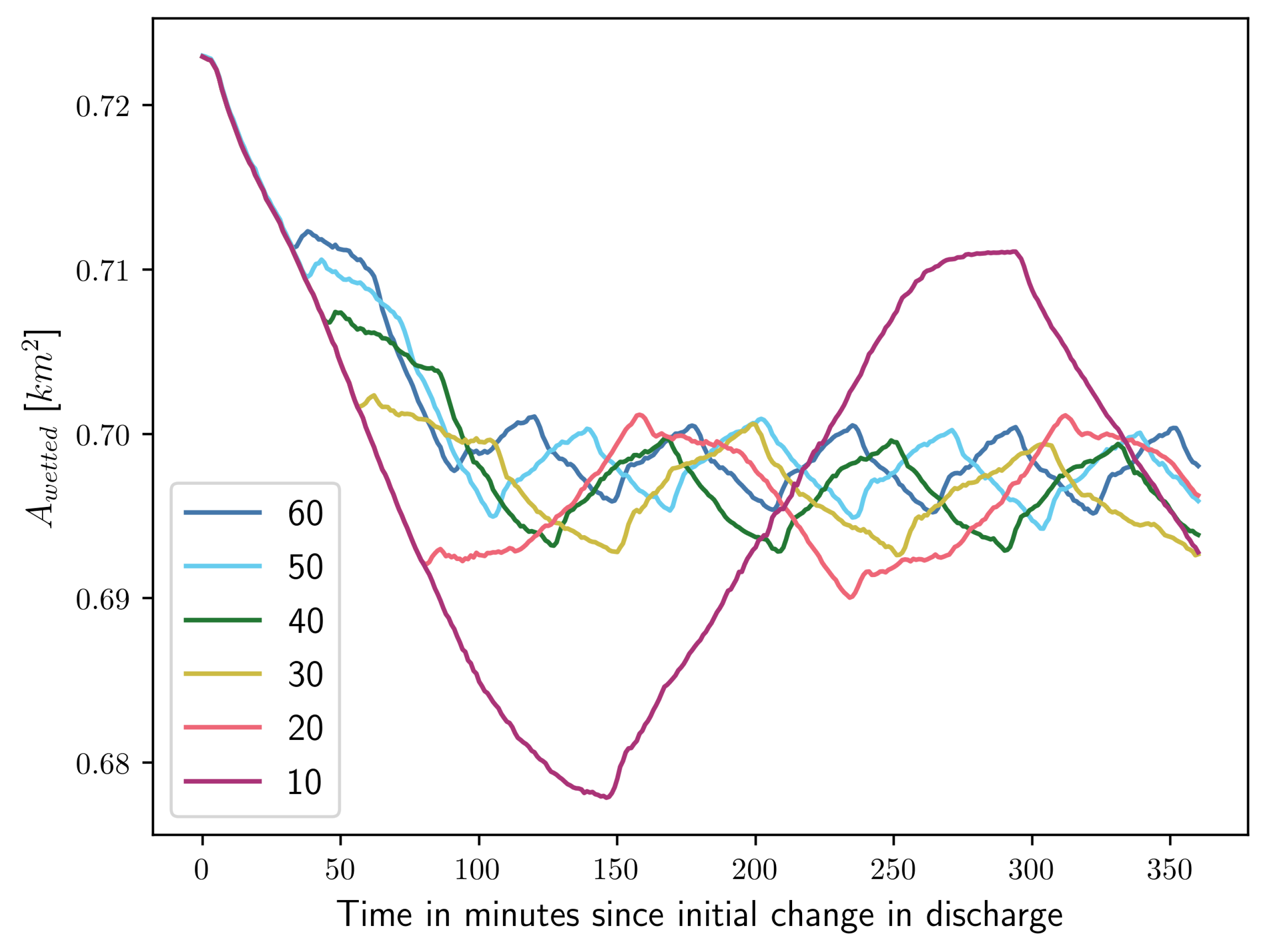
4.3. Dynamics for the Different Scenarios
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ACUR | Air Cushion Underground Reservoir |
| CFD | Computational Fluid Dynamics |
| DEM | Digital Elevation Model |
| MASL | Meters Above Sea Level |
| SWE | Shallow Water Equations |
| WSE | Water Surface Elevation |
References
- UNFCCC. The Paris Agreement. 2016. Available online: https://unfccc.int/process-and-meetings/the-paris-agreement/the-paris-agreement (accessed on 20 March 2020).
- Regeringen. A Coherent Policy for the Climate. 2019. Available online: https://www.government.se/press-releases/2019/12/a-coherent-policy-for-the-climate/ (accessed on 20 March 2020).
- Regjeringen. Norway Steps up 2030 Climate Goal to at Least 50% towards 55%. 2020. Available online: https://www.regjeringen.no/en/aktuelt/norge-forsterker-klimamalet-for-2030-til-minst-50-prosent-og-opp-mot-55-prosent/id2689679/ (accessed on 20 March 2020).
- Ympäristöministeriö. Towards Climate-Smart Day-to-Day Living—Medium-term Climate Change Plan to 2030. 2019. Available online: https://www.ym.fi/en-US/The_environment/Climate_and_air/Mitigation_of_climate_change/National_climate_policy/Climate_Change_Plan_2030 (accessed on 20 March 2020).
- European Comission. 2030 Climate & Energy Framework. Available online: https://ec.europa.eu/clima/policies/strategies/2030_en (accessed on 20 March 2020).
- European Comission. Renewable Energy Statistics. 2020. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php/Renewable_energy_statistics (accessed on 23 March 2020).
- Statnet, Fingrid, Energinet, Svenska Kraftnät. Nordic Grid Development Plan 2019. Available online: https://www.statnett.no/contentassets/61e33bec85804310a0feef41387da2c0/nordic-grid-development-plan-2019-for-web.pdf (accessed on 23 March 2020).
- North Sea Link. Available online: http://www.northsealink.com/ (accessed on 23 March 2020).
- HydroFlex. Technology for Mitigation of Highly Fluctuating Discharges into Downstream River. Available online: https://www.h2020hydroflex.eu/work-packages/wp-5/task-5-1/ (accessed on 24 March 2020).
- Bunn, S.E.; Arthington, A.H. Basic principles and ecological consequences of altered flow regimes for aquatic biodiversity. Environ. Manag. 2002, 30, 492–507. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saltveit, S.; Halleraker, J.; Arnekleiv, J.; Harby, A. Field experiments on stranding in juvenile Atlantic salmon (Salmo salar) and brown trout (Salmo trutta) during rapid flow decreases caused by hydropeaking. Regul. Rivers Res. Manag. Int. J. Devoted River Res. Manag. 2001, 17, 609–622. [Google Scholar] [CrossRef]
- Halleraker, J.; Saltveit, S.; Harby, A.; Arnekleiv, J.; Fjeldstad, H.P.; Kohler, B. Factors influencing stranding of wild juvenile brown trout (Salmo trutta) during rapid and frequent flow decreases in an artificial stream. River Res. Appl. 2003, 19, 589–603. [Google Scholar] [CrossRef]
- McKinney, T.; Speas, D.W.; Rogers, R.S.; Persons, W.R. Rainbow trout in a regulated river below Glen Canyon Dam, Arizona, following increased minimum flows and reduced discharge variability. N. Am. J. Fish. Manag. 2001, 21, 216–222. [Google Scholar] [CrossRef]
- Choi, B.; Choi, S.U. Impacts of hydropeaking and thermopeaking on the downstream habitat in the Dal River, Korea. Ecol. Inform. 2018, 43, 1–11. [Google Scholar] [CrossRef]
- Bejarano, M.D.; Jansson, R.; Nilsson, C. The effects of hydropeaking on riverine plants: A review. Biol. Rev. 2018, 93, 658–673. [Google Scholar] [CrossRef] [PubMed]
- Pisaturo, G.R.; Righetti, M.; Castellana, C.; Larcher, M.; Menapace, A.; Premstaller, G. A procedure for human safety assessment during hydropeaking events. Sci. Total Environ. 2019, 661, 294–305. [Google Scholar] [CrossRef] [PubMed]
- Premstaller, G.; Cavedon, V.; Pisaturo, G.R.; Schweizer, S.; Adami, V.; Righetti, M. Hydropeaking mitigation project on a multi-purpose hydro-scheme on Valsura River in South Tyrol/Italy. Sci. Total Environ. 2017, 574, 642–653. [Google Scholar] [CrossRef] [PubMed]
- Gostner, W.; Lucarelli, C.; Theiner, D.; Kager, A.; Premstaller, G.; Schleiss, A. A holistic approach to reduce negative impacts of hydropeaking. In Proc. of International Symposium on Dams and Reservoirs under Changing Challenges; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2011; pp. 857–866. [Google Scholar] [CrossRef] [Green Version]
- Storli, P.T.; Lundström, T.S. A New Technical Concept for Water Management and Possible Uses in Future Water Systems. Water 2019, 11, 2528. [Google Scholar] [CrossRef] [Green Version]
- Burman, A. Inherent Damping in a Partially Dry River. In Proceedings of the 38th IAHR World Congress, Panama City, Panama, 1–6 September 2019; pp. 5091–5100. [Google Scholar]
- Juárez, A.; Adeva-Bustos, A.; Alfredsen, K.; Dønnum, B.O. Performance of a two-dimensional hydraulic model for the evaluation of stranding areas and characterization of rapid fluctuations in hydropeaking rivers. Water 2019, 11, 201. [Google Scholar] [CrossRef] [Green Version]
- Xie, Q.; Yang, J.; Lundström, S.; Dai, W. Understanding morphodynamic changes of a tidal river confluence through field measurements and numerical modeling. Water 2018, 10, 1424. [Google Scholar] [CrossRef] [Green Version]
- Williams, R.D.; Brasington, J.; Hicks, M.; Measures, R.; Rennie, C.; Vericat, D. Hydraulic validation of two-dimensional simulations of braided river flow with spatially continuous aDcp data. Water Resour. Res. 2013, 49, 5183–5205. [Google Scholar] [CrossRef] [Green Version]
- Horstman, E.; Dohmen-Janssen, M.; Hulscher, S. Modeling tidal dynamics in a mangrove creek catchment in Delft3D. Coast. Dyn. 2013, 2013, 833–844. [Google Scholar]
- Yunus, A.C. Fluid Mechanics: Fundamentals And Applications (Si Units); Tata McGraw Hill Education Private Limited: New York, NY, USA, 2014; Volume 3. [Google Scholar]
- Ferziger, J.H.; Perić, M.; Street, R.L. Computational Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2020; Volume 4. [Google Scholar]
- Cushman-Roisin, B.; Beckers, J.M. Introduction to Geophysical Fluid Dynamics: Physical and Numerical Aspects; Academic Press: Cambridge, MA, USA, 2011. [Google Scholar] [CrossRef]
- Deltares. Delft3D-Flow User Manual; Deltares: Delft, The Netherlands, 2014. [Google Scholar]
- Richardson, L.F. IX. The approximate arithmetical solution by finite differences of physical problems involving differential equations, with an application to the stresses in a masonry dam. Philos. Trans. R. Soc. Lond. Ser. A Contain. Pap. A Math. Phys. Character 1911, 210, 307–357. [Google Scholar] [CrossRef] [Green Version]
- Celik, I.B.; Ghia, U.; Roache, P.J.; Freitas, C.J.; Coleman, H.; Raad, P.E.; Celik, Ì.; Freitas, C.; Coleman, H. Procedure for estimation and reporting of uncertainty due to discretization in {CFD} applications. J. Fluids Eng. 2008. [Google Scholar] [CrossRef] [Green Version]
- Vattenfall. Stornorrfors. Available online: https://powerplants.vattenfall.com/sv/stornorrfors (accessed on 25 March 2020).
- Angele, K.; Andersson, A. Validation of a HEC-RAS Model of the Stornorrfors Fish Migration Dry Reach against New Field Data. In Proceedings of the 12th International Symposium on Ecohydraulics, Tokyo, Japan, 19–24 August 2018. [Google Scholar]
- Enns, R.H.; McGuire, G.C.; Greene, R.L. Nonlinear physics with Maple for scientists and engineers. Comput. Phys. 1997, 11, 451–453. [Google Scholar] [CrossRef]
- Kumar, V. Hysteresis. In Encyclopedia of Snow, Ice and Glaciers; Singh, V.P., Singh, P., Haritashya, U.K., Eds.; Springer: Dordrecht, The Netherlands, 2011; pp. 554–555. [Google Scholar] [CrossRef]
- Perumal, M.; Shrestha, K.B.; Chaube, U. Reproduction of hysteresis in rating curves. J. Hydraul. Eng. 2004, 130, 870–878. [Google Scholar] [CrossRef]
- Länsstyrelsen i Norrbotten. Tappningsschema Gamla Älvfåran Stornorrfors 2017; Länsstyrelsen i Norrbotten: Luleå, Sweden, 2017; diarienummer 532-15339-15.
- Te, C.V. Open-Channel Hydraulics: International Student Ed; McGraw Hill: New York, NY, USA, 1959. [Google Scholar]
- Bakken, T.H.; King, T.; Alfredsen, K. Simulation of river water temperatures during various hydro-peaking regimes. J. Appl. Water Eng. Res. 2016, 4, 31–43. [Google Scholar] [CrossRef]
- Deltares. QUICKIN User Manual; Deltares: Delft, The Netherlands, 2018. [Google Scholar]
- Scipy.org. SciPy. 2020. Available online: https://docs.scipy.org/doc/scipy-0.14.0/reference/generated/scipy.optimize.fsolve.html (accessed on 8 April 2020).
- Pisaturo, G.R.; Righetti, M.; Dumbser, M.; Noack, M.; Schneider, M.; Cavedon, V. The role of 3D-hydraulics in habitat modelling of hydropeaking events. Sci. Total Environ. 2017, 575, 219–230. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Maximum error | 0.74 |
| Minimum error | 0.02 |
| Median error | 0.08 |
| Standard deviation | 0.304 |
| Pearson correlation | 0.9995 |
| Grid | Nr. of Elements | Representative Size [1/m] | ||
|---|---|---|---|---|
| Coarse | 521 | 26 | 13546 | 0.0086 |
| Less-Fine | 1040 | 74 | 76960 | 0.0036 |
| Finer | 2078 | 218 | 453004 | 0.0015 |
| Finest | 4154 | 218 | 905572 | 0.0011 |
| Grid | [m2] | Error |
|---|---|---|
| Coarse | 863897 | +26.10% |
| Less-Fine | 724442 | +5.71% |
| Finer | 746164 | +8.88% |
| Finest | 733532 | +7.03% |
| Richardson Extrapolation | 685334 | - |
| Standard Deviation | 0.304 |
| Validation Point | Simulated | Measured | ||
|---|---|---|---|---|
| Increase Time | Decrease Time | Increase Time | Decrease Time | |
| Point 1 | 29 | 44 | 32 | 69 |
| Point 3 | 33 | 56 | 35 | 79 |
| Point 5 | 35 | 69 | 36 | 88 |
| Point 7 | 62 | 99 | 51 | 109 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Burman, A.J.; Andersson, A.G.; Hellström, J.G.I.; Angele, K. Case Study of Transient Dynamics in a Bypass Reach. Water 2020, 12, 1585. https://doi.org/10.3390/w12061585
Burman AJ, Andersson AG, Hellström JGI, Angele K. Case Study of Transient Dynamics in a Bypass Reach. Water. 2020; 12(6):1585. https://doi.org/10.3390/w12061585
Chicago/Turabian StyleBurman, Anton J., Anders G. Andersson, J. Gunnar I. Hellström, and Kristian Angele. 2020. "Case Study of Transient Dynamics in a Bypass Reach" Water 12, no. 6: 1585. https://doi.org/10.3390/w12061585