3.1. Free Surface Profile
A series of variables related to the free surface profile of the hydraulic jump developed in the physical model were measured in the experimental campaign. Firstly, the sequent depths ratio was obtained, as a crucial feature for the hydraulic jump characterization. This parameter is defined as the ratio between the downstream (
) and the upstream (
) flow depth to the hydraulic jump. The estimation resulting from the physical model was compared to well-established theoretical expressions for CHJ, applied for the case study inflow conditions. On the one hand, the theoretical expression proposed by Bélanger [
28] was used:
where
accounts for the particular subcritical flow depth calculated using this expression. On the other hand, the expression proposed by Hager and Bremen [
29], which is based on Equation (4), but incorporating the effect of wall friction and hence involving the inflow Reynolds number and the aspect ratio, was employed:
where
is the hydraulic jump width.
Table 3 compares the results obtained for the sequent depths ratio. The value of the upstream flow depth was obtained in the experimental device through point gauge measurements; whereas the downstream flow depth was calculated from the free surface profile measured with LIDAR techniques.
Table 3 shows that, despite the similar results for the stilling basin physical model and the analytical expressions for CHJ, the effect of the energy dissipation devices on the flow is significant. As stated by Hager [
2], the energy dissipation devices in a typified USBR II stilling basin lead to a reduction in the hydraulic jump dimensions, also providing an enhanced energy dissipation. Thus, the stilling basin model provided a lower subcritical flow depth (
) in comparison with the expected values for a CHJ. These results, comparing equal inflow conditions, showed a decrease in the sequent depths ratio value due to the influence of the energy dissipation devices. Similar results were already observed in previous studies regarding the typified USBR II stilling basin [
7,
8]. In particular, Peterka [
23] stated that, for the hydraulic jump developed in stilling basins, the ratio
should fall in the range 0.6–1.0, which is accomplished in the presented results.
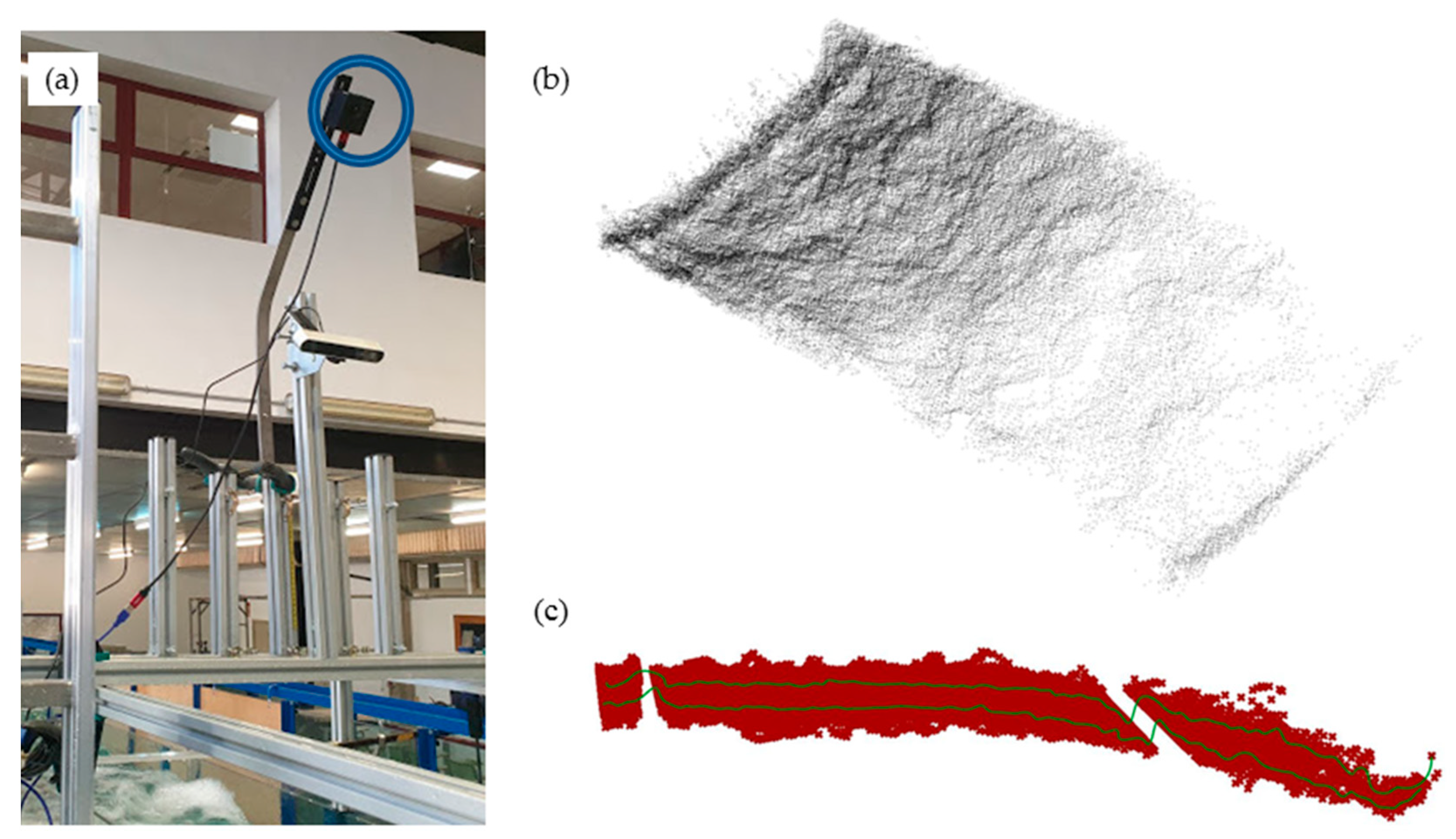
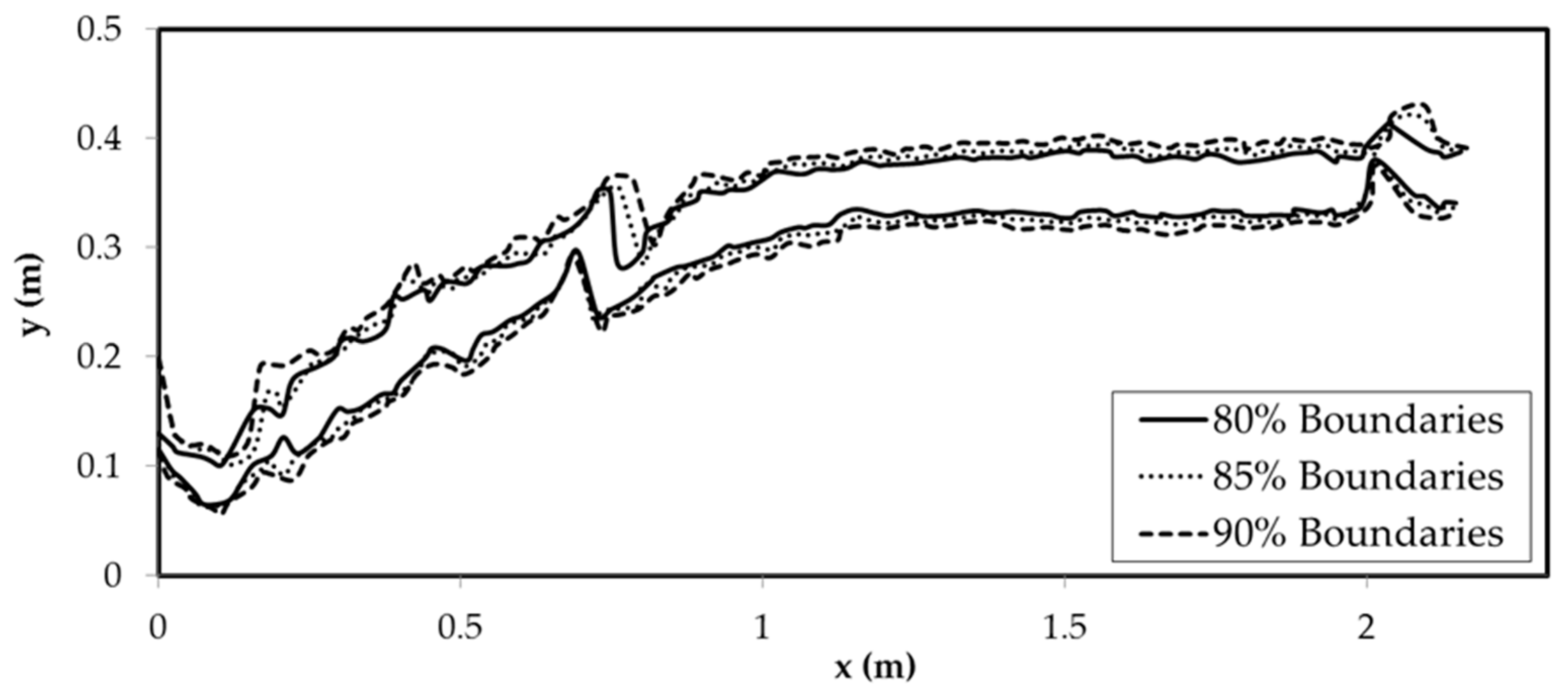
Regarding the hydraulic jump free surface, the first step was to process the data collected with the time-of-flight camera. To this end, anomalous values and outliers caused by splashing and droplets were discarded. This made it possible to obtain a series of bands containing a specific percentage of the measured points along the hydraulic jump longitudinal axis during the data collection time.
Figure 5 shows the lower and upper boundaries for the bands containing 80%, 85% and 90% of the measured points.
The bands displayed in
Figure 5 show that there are very slight differences, regardless of the percentage of measured points taken to create the band. This fact gives an indication of the results’ consistency after using LIDAR techniques for the characterization of the free surface profile in the hydraulic jump. Moreover, the observed differences between the lower and the upper boundaries of the represented bands reflect an acceptable uncertainty of the technique employed, considering the intense free surface fluctuations occurring in a hydraulic jump. However, additional filtering was necessary to overcome certain limitations derived from the physical characteristics of the model and the positioning of the instrumentation. As observed in
Figure 5, for the lowest
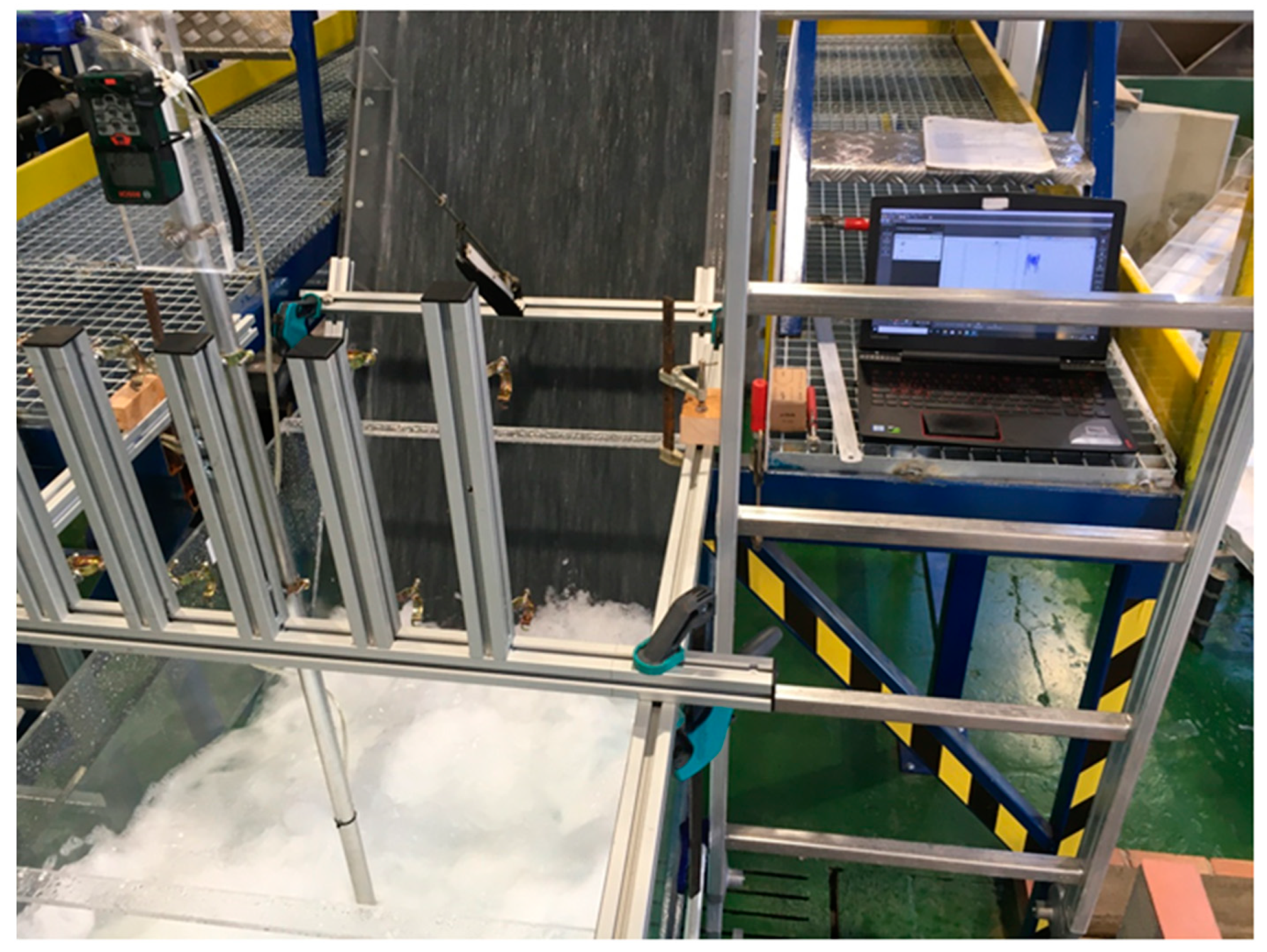
x values (i.e., surroundings of the hydraulic jump toe in the beginning of the basin), the camera collected part of the free surface profile in the sloping channel. This data had to be discarded since it was part of the free surface profile upstream of the hydraulic jump toe. Moreover, for
x~0.7 m and for
x > 2 m, the structure of the channel interfered with the measurements. The interference was caused by the methacrylate crossbars used to reinforce the channel, which were placed between the hydraulic jump and the camera. Accordingly, these parts of the profile were substituted by discrete measurements using limnimeters.
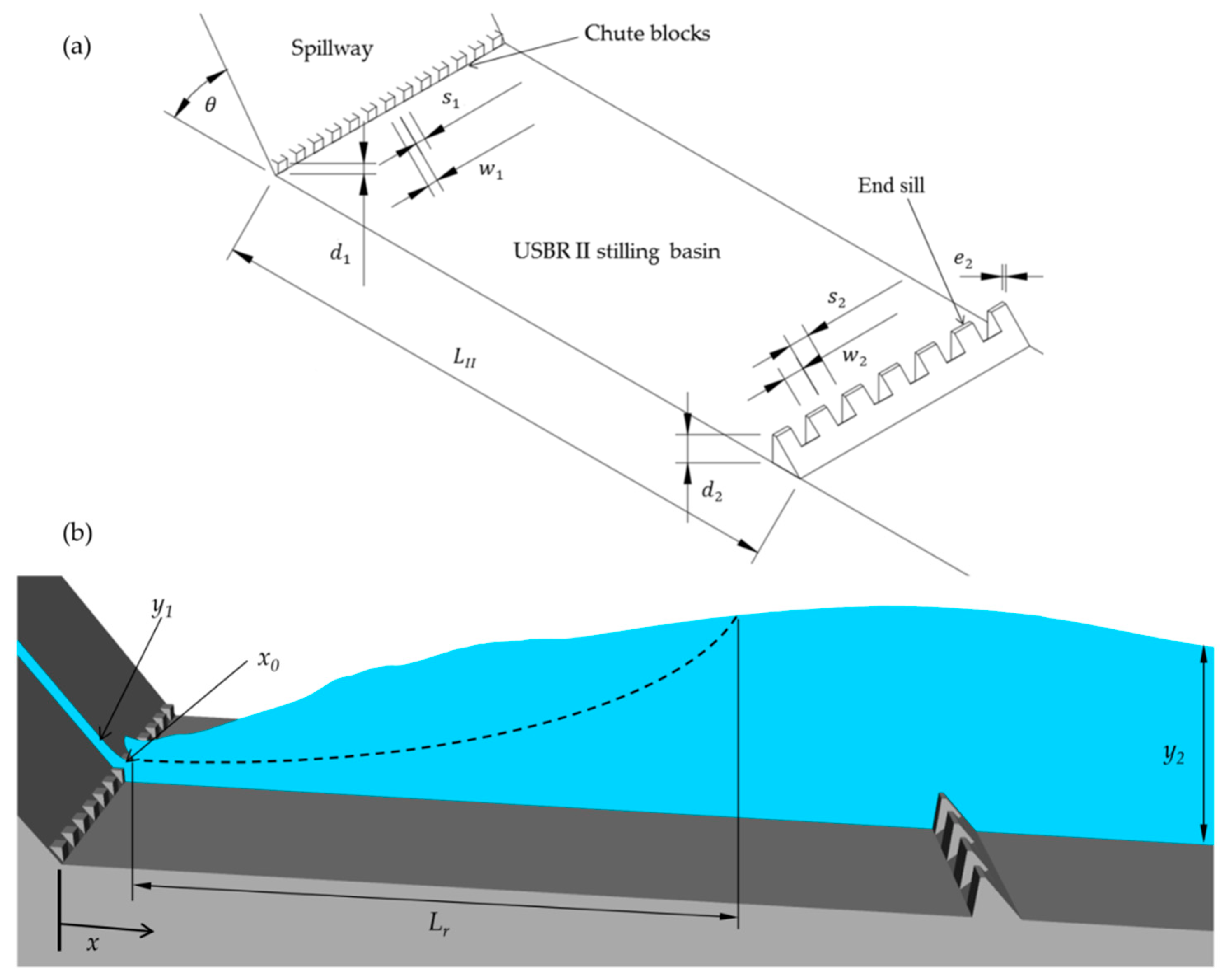
Finally, the information collected was employed to obtain the mean free surface profile along the physical model longitudinal axis. For convenient comparison with previous literature results, dimensionless values were calculated following the expressions proposed by Hager [
2]:
where
is the hydraulic jump toe position and
is the hydraulic jump roller length. The hydraulic jump roller length in the physical model was estimated from the velocity measurements performed with the Pitot tube, as developed in
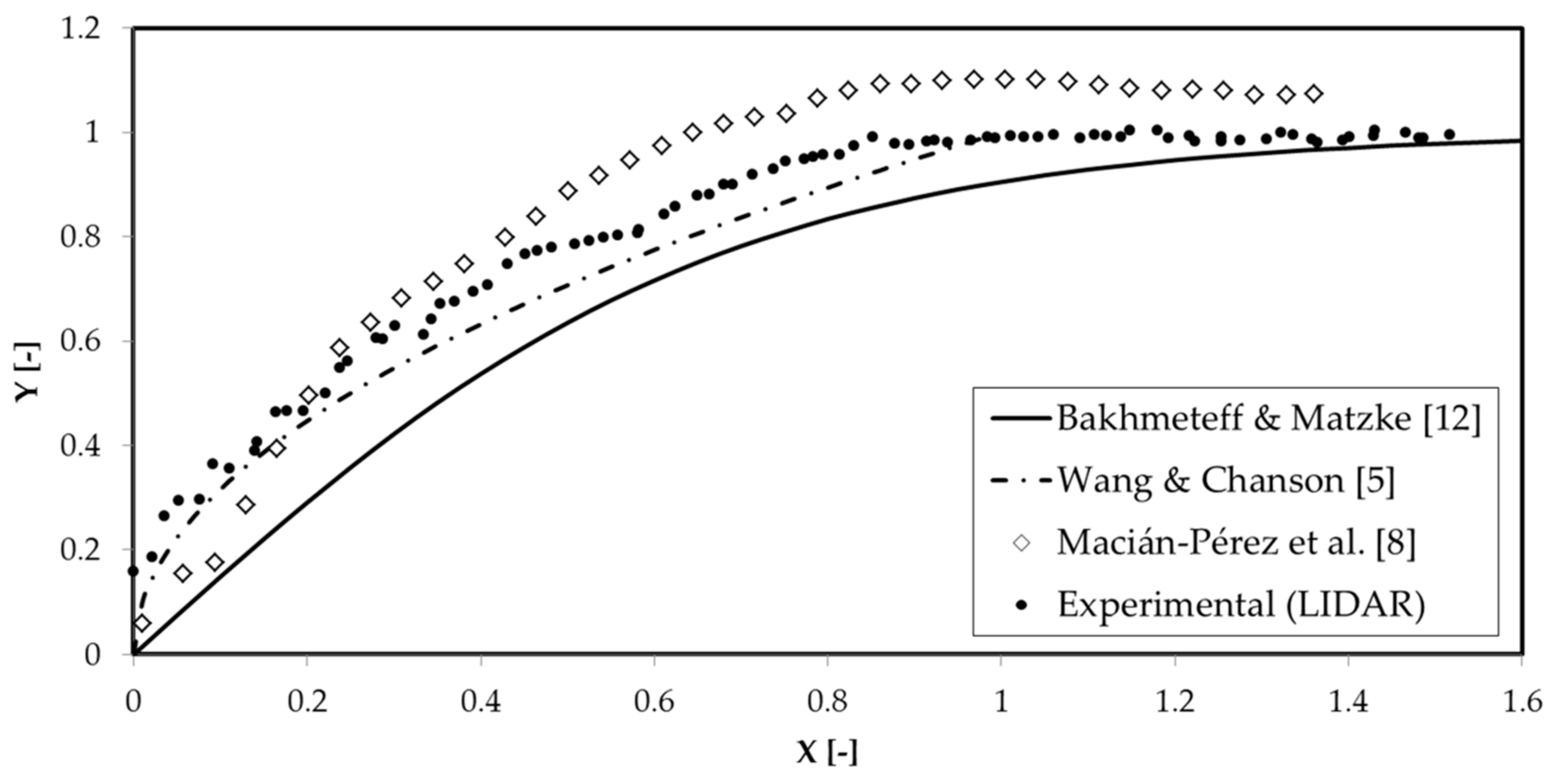
Section 3.3. The dimensionless free surface profile hence obtained is shown in
Figure 6. These experimental results are compared to three different sources of bibliographic data [
5,
8,
12].
A general observation of the results presented in
Figure 6 shows that the physical model and the measuring techniques employed were able to provide a free surface profile in good agreement with previous studies. Nevertheless, some differences between profiles are to be discussed. It should be pointed out that Bakhmeteff & Matzke [
12] and Wang and Chanson [
5] profiles were originally obtained from the study of the CHJ. From this point of view, higher measured values of flow depth in the physical model should be expected, because of the effect of the energy dissipation devices on the flow profile. More specifically, the chute blocks placed at the beginning of the stilling basin model (
X = 0) necessarily produce higher flow depths immediately downstream, when compared to those of a CHJ. As can be observed in
Figure 6, such higher flow depths basically remain along the central part of the roller, up to
X~0.9, where the profile seems to reach the subcritical flow depth. Thus, the subcritical flow depth was reached, in the stilling basin physical model, closer to the hydraulic jump toe, when compared to the CHJ, in which flow depths keep increasing at least up to
X~1.5.
As stated by Hager [
2], the energy dissipation devices in a typified USBR II stilling basin provide shorter hydraulic jumps. The results presented in
Figure 6 help to quantify the effect of the energy dissipation devices on the hydraulic jump dimensions. Thus, they constitute an interesting step forward to characterize the hydraulic jump developed in stilling basins, although a wider range of inflow conditions should be tested to confirm the results.
This influence of the energy dissipation devices in the free surface profile was analyzed and discussed in Macián-Pérez et al. [
8], also for a typified USBR II physical model. As shown in
Figure 6, certain differences in non-dimensional depths are found between the present research and Macián-Pérez et al. [
8]. For
X > 0.2, the profile reported herein clearly lies below the one obtained in [
8]. This behavior is probably explained by some limitations and particularities of the two different measurement methods used. As discussed in Macián-Pérez et al. [
8], the Digital Image Processing (DIP) techniques used in that research tend to overestimate the depths of the free surface profile, mainly due to two factors. On the one hand, the intense aeration characteristic of the hydraulic jump phenomenon leads to bubbles and droplets being continuously expelled. This causes changes of light intensity that introduce bias in the image treatment. On the other hand, DIP techniques are based on images taken from the side of the experimental channel [
30]. The time-of-flight camera used herein, though, allows a better estimation of the free surface profile along the longitudinal axis of the hydraulic jump.
Overall, the presented technique for determining the free surface profile seemed to overcome some limitations associated with other methodologies such as the DIP, but still reflects a clear influence of the energy dissipation devices in comparison with the results for the CHJ. Thus, the time-of-flight camera, based on LIDAR techniques, showed great potential to perform free surface profile measurements in aerated flows such as the hydraulic jump. Apart from the mentioned advantages in the results, the economic cost and the time consumed by LIDAR techniques is competitive when compared to the bibliographic methodology analyzed. Furthermore, LIDAR techniques would make it possible to obtain information regarding the 3D free surface structure of the hydraulic jump. Consequently, the formation of oblique shock-waves and the interference of the channel sidewalls could be addressed [
31,
32]. This information is of utmost importance and should undoubtedly be considered in further research lines.
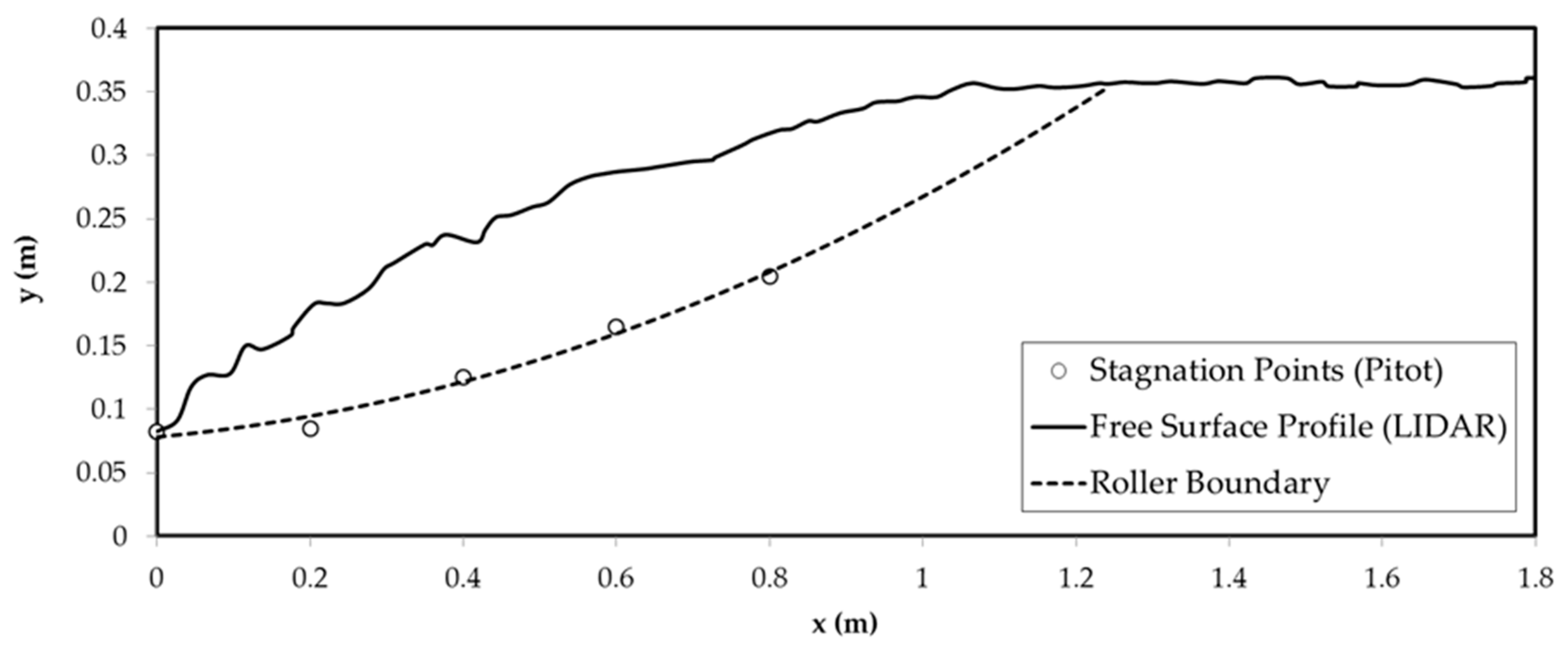
3.3. Hydraulic Jump Roller Length
The hydraulic jump roller length was also estimated using the information collected in the experimental campaign. To this end, the stagnation point criterion was employed [
33], taking the streamwise velocity vertical profiles measured in several sections throughout the hydraulic jump roller region. In each of these profiles, the point where velocity tended to zero, namely the stagnation point, was identified. The intersection between the line that joined all of the identified stagnation points and the averaged free surface profile led to the roller end section. With regard to the beginning of the hydraulic jump roller, it was directly located at the hydraulic jump toe (
Figure 7). It is important to highlight the existence of intense fluctuations bound to the hydraulic jump nature that add uncertainty to the estimation of the roller length. Thus, there are fluctuations not only in the velocity field, but also in the free surface and the jump toe position. However, this criterion has proven to provide successful estimations of the parameter [
4,
33].
The hydraulic jump roller length estimated with the stagnation point criterion was
Lr = 1.25 m. For comparison purposes, the roller length was also computed through the analytical expression presented by Hager et al. [
33]:
Using Equation (9), which was proposed for CHJ, the resulting roller length was
Lr = 1.67 m. Thus, the physical model provided a considerably shorter roller region. This is in good agreement with the results presented in
Figure 6 regarding the free surface profile of the hydraulic jump in the basin, which reached the subcritical depth faster than the CHJ. Accordingly, the results show that the stilling basin energy dissipation devices provide shorter hydraulic jump lengths, as previously stated by Hager [
2]. A better understanding of how these devices shorten the hydraulic jump is essential for the improved design of stilling basins and their adaptation to larger discharges. Therefore, it is worth considering further research on the topic, involving different stilling basin geometries and inflow conditions, to identify characteristic trends and patterns in the hydraulic behavior of the structure.
The estimation of the hydraulic jump roller length could also be improved by using experimental techniques able to provide precise measurements of backwards velocities and in highly aerated areas, such as the optical-fibre probe or the Particle Image Velocimetry (PIV). However, the Pitot tube proved to be a low-cost alternative that leads to appropriate estimations of the roller length through the stagnation point criterion, in spite of its limitations.
3.4. Velocity Distribution
The velocity distribution of the flow developed in the stilling basin physical model was characterized. To do so, a series of streamwise velocity vertical profiles were measured along the longitudinal axis of the horizontal channel.
Table 5 shows the location of the different profiles considered to characterize the velocity field.
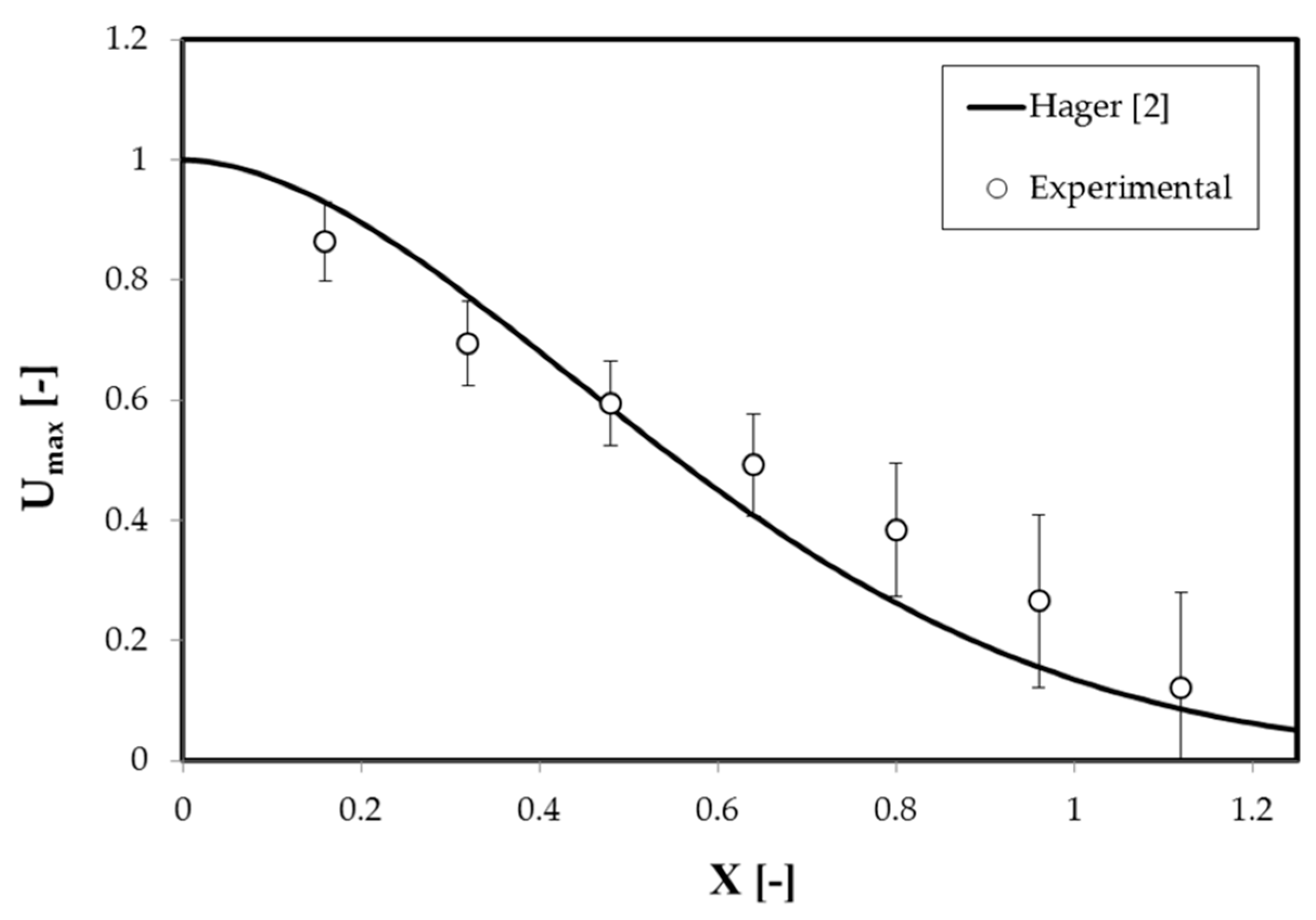
The first step in the analysis of the velocity distribution in the stilling basin model was focused on the maximum forward velocity decay. To this end, the expression proposed by Hager [
2] for CHJ was compared with the experimental information collected in the model using the Pitot tube (
Figure 8). The dimensionless value of the maximum velocity for each profile (
was obtained with the following expression:
where
is the maximum forward velocity value of the profile;
and
are, respectively, the depth-averaged velocities upstream and downstream the hydraulic jump.
The results displayed in
Figure 8 show a good agreement between the maximum forward velocity decay obtained in the stilling basin physical model with the Pitot tube and the analytical expression for CHJ by Hager [
2]. However, a slightly slower decay was observed for the experimental results. This implies that the differences in the maximum velocity values for profiles in different positions were not as large in the stilling basin model as for the CHJ. A possible explanation for this is the influence of the energy dissipation devices providing a more stable velocity distribution in terms of the longitudinal position.
Error bars were added in
Figure 8 since considerable uncertainty in the velocity measurements along the hydraulic jump was expected. These bars show the uncertainty of each measurement using one standard deviation of the collected data for the corresponding point. Considering the strong velocity fluctuations in the hydraulic jump phenomenon [
4,
5], the Pitot tube provides an acceptable uncertainty, although an increase in the error bars can be observed as the measurements move downstream of the hydraulic jump toe.
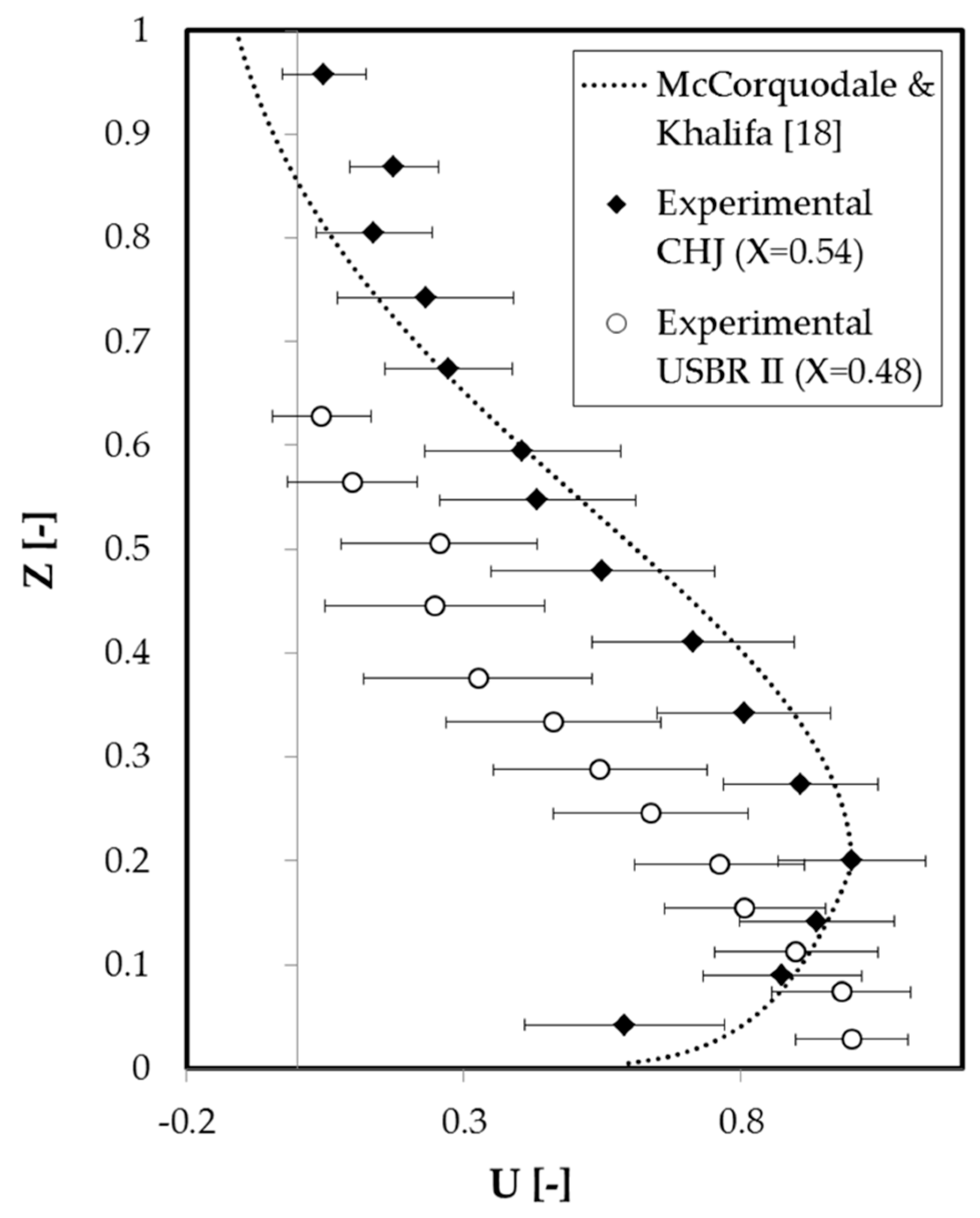
For the individual analysis of the complete profiles, in spite of the large number of points measured with the Pitot tube for each of them, the results provided a discrete and not a continuous velocity distribution. In addition, several tests conducted in the experimental channel, with the Pitot tube placed in a reverse position, showed that this device was not able to capture backwards velocities in the flow. A first attempt to overcome these issues was made by comparing the experimental data with the analytical expression for CHJ proposed by McCorquodale and Khalifa [
18] (
Figure 9). According to these authors, the mean vertical velocity distribution within the CHJ can be expressed through two functions:
where
is the horizontal velocity, which achieves its maximum value (
) at a height
=
. In addition,
is the horizontal component of the freestream velocity, defined by McCorquodale & Khalifa [
18] as the velocity obtained for
→
. Finally,
=
−
.
Figure 9 shows an example with one of the profiles measured in the physical model together with a profile in a CHJ, also measured with the Pitot tube, both for a similar position along the hydraulic jump. In order to represent together velocity profiles coming from different hydraulic jumps, the values were normalized as:
where
and
are the flow depth and the maximum velocity, respectively, both in the corresponding vertical profile under study.
Figure 9 shows that the streamwise velocity vertical profiles for the hydraulic jump in the stilling basin differed from the typical shape for a CHJ and, therefore, it was not possible to adjust the analytical expression by McCorquodale and Khalifa [
18]. The main differences are derived from the fact that, for the stilling basin model, the maximum velocity was located in the lowest part of the vertical profiles. In contrast, for the CHJ, there is an increase in the streamwise velocity values from the channel streambed, until the maximum velocity value is reached. This differences in the stilling basin were observed for profiles up to V4 (
= 0.64), meaning that the maximum velocity was reached in the lowest part of the profile for a significant part of the hydraulic jump developed in the energy dissipation structure. As observed during the experimental campaign, the explanation arises from the effect of the chute blocks at the beginning of the basin. The deflection caused by these energy dissipation devices triggers the flow in the region next to the channel streambed and hence, the maximum velocities are achieved in the lowest part of the vertical profiles.
As previously mentioned, this effect was clearly noted for the three profiles closest to the beginning of the basin (V1–V3), whereas for the three next profiles (V4–V6) the maximum velocity did not correspond with the lowest measured position. As it was expected, the effect of the deflection caused by the chute blocks on the flow was lower for further positions and consequently, the differences between the profiles measured in the basin and the typical shape expected for a CHJ tended to decrease as the profile moved downstream. However, the influence of the energy dissipation devices on these profiles (V4–V6) was still observable through the low
values obtained in comparison with the CHJ. Finally, the profile V7 was located downstream of the hydraulic jump roller. Consequently, the analytical expression for velocity profiles in the roller region of a CHJ (Equations (11) and (12)) was not strictly followed by this profile. Thus, the discussed discrepancies prevent the adjustment of the analytical profile by McCorquodale and Khalifa [
18] to the values measured in the stilling basin physical model. In addition to this, the limitations of the instrumentation to measure backwards velocities in the hydraulic jump flow discarded the possibility of obtaining continuous velocity profiles.
The uncertainty of the measurements performed to achieve the streamwise velocity vertical profiles was also considered through the error bars included in
Figure 9. The hydraulic jump is characterized by intense velocity fluctuations [
4,
5], which are clearly reflected in the uncertainties obtained. It is important to highlight that no significant differences were found between the error bars obtained for the CHJ and the hydraulic jump in the typified USBR II stilling basin.
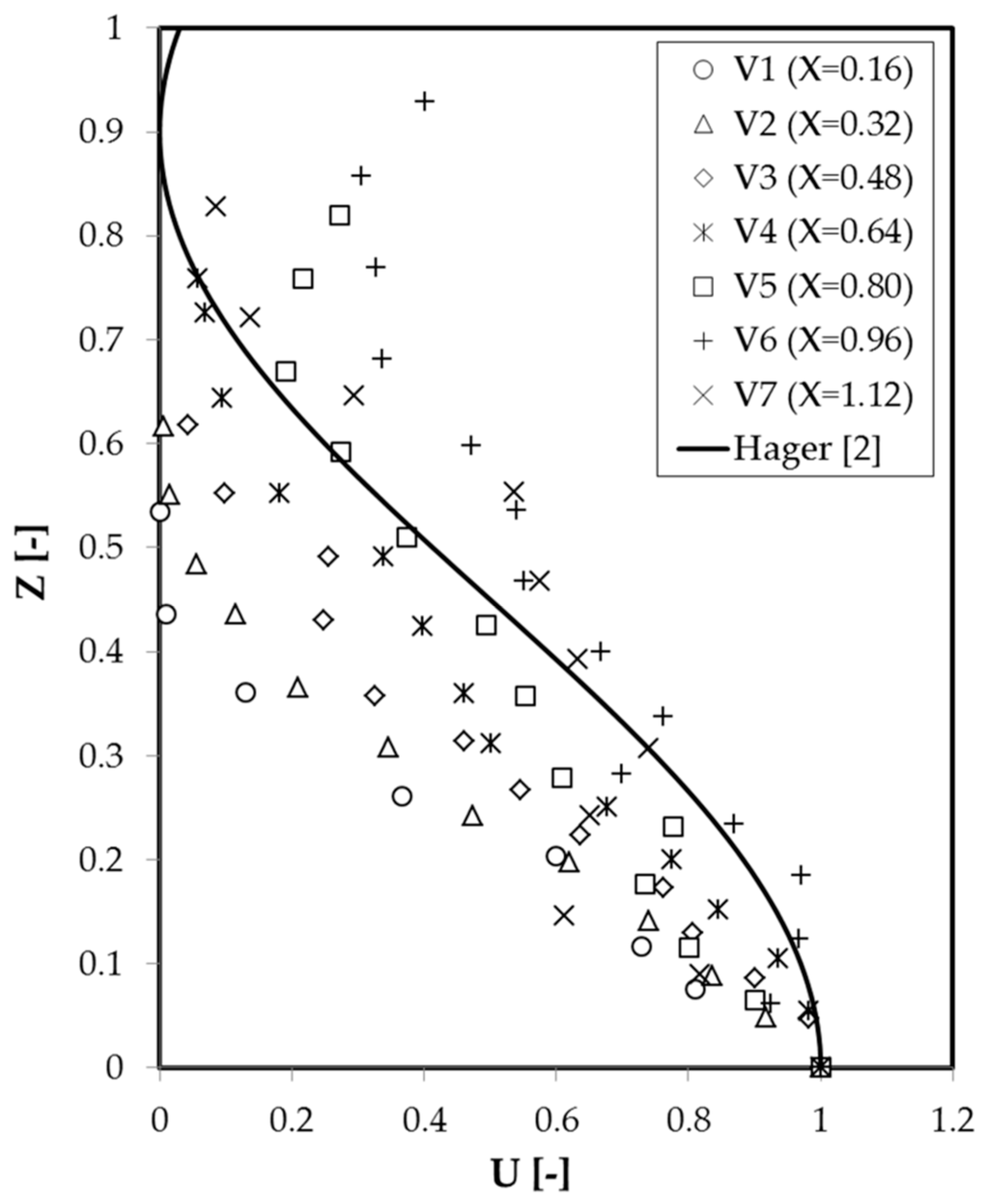
Despite the mentioned difficulties, further comparison of the measured profiles was conducted to gain a better insight into the influence of the energy dissipation devices on the velocity distribution. The profiles were represented together with the expression proposed by Hager [
2] for the diffusion portion of velocity profiles in the CHJ roller region (
Figure 10):
where
is the dimensionless velocity and
is the dimensionless position in the vertical profile. These dimensionless values were obtained through the following procedure, also proposed by Hager [
2]:
where, for each vertical profile,
is the measured position;
is the flow depth;
and
are, respectively, the maximum velocity and the maximum backwards velocity;
is the position at which
=
.
The observation of
Figure 10 shows significant differences among the experimental velocity profiles measured in the stilling basin model. Differences are also found in comparison with the theoretical expression for CHJ proposed by Hager [
2]. In general, as shown in
Figure 10, the observed differences tend to increase for higher
values, associated with a larger presence of bubbles. This fact has a feasible explanation by considering the difficulties of the Pitot tube to take reliable measurements in highly aerated regions with intense velocity fluctuations, such as the hydraulic jump recirculating region [
22,
27]. As previously explained, these limitations could not be addressed by the adjustment of an analytical expression such as the one presented by McCorquodale and Khalifa [
18]. Consequently, the backwards velocities could not be properly estimated, which significantly affected the accuracy of the dimensionless representations derived from Equations (16) and (17).
However, in spite of the limitations of the measuring instrumentation employed, some interesting results were observed. Firstly, the velocity decay from the channel streambed was faster in the measured profiles when compared to the analytical expression for a CHJ (Equation (13)). As can be observed, almost every experimental profile shows lower velocity values than the expression by Hager [
2], especially for low
values. A possible explanation for this is the previously observed effect of the energy dissipation devices. The deflection of the flow caused by these devices led to the maximum velocity values taking place in the lowest part of the profile. From this maximum value, very close to the streambed, the measured velocity decay is steeper than the one for the CHJ, probably because the acceleration of the flow caused by the deflection only affects the flow area adjacent to the channel streambed. In fact, this faster decay is more relevant in the profiles closer to the chute blocks (V1–V3), supporting the explanation based on the influence of the energy dissipation devices on the flow.
In these terms, as the velocity profiles moved downstream from the beginning of the basin (V4 and V5), the differences decreased and they tended to approach the CHJ velocity profile (Equation (13)). Again, this was in good agreement with the chute blocks causing the main differences between the velocity profiles measured in the stilling basin model and the typical shape for a CHJ velocity profile. Concerning velocity profiles V6 and V7, they were located in the surroundings of the roller end position (
= 1). Therefore, a higher variability was observed and the trend established for velocity profiles in the roller region could not be strictly followed. However, these profiles are still influenced by the hydraulic jump flow and also by the presence of the end sill (
~1.30). Consequently, the profiles neither followed a velocity distribution for subcritical flow in open channels like the one presented by Kirkgoz and Ardiclioglu [
34].
To sum up, the measurements performed in the stilling basin physical model with the Pitot tube present some limitations, which have been discussed. In spite of this, the experimental campaign made it possible to shed light on some features of the velocity distribution within the hydraulic jump developed in the typified USBR II stilling basin. In particular, it was clearly shown that the maximum forward velocity presented slighter differences among the profiles in relation with their position along the jump, when compared with the CHJ. Furthermore, the flow deflection caused by the chute blocks in the beginning of the basin provided the highest velocity values in the lowest region of the flow, for profiles within the first half of the roller region. For downstream profiles, the effect was reduced but still noted. Finally, for profiles close to the end of the roller region, it was difficult to identify a defined trend, since the influence of the end sill joined the location of these profiles in the boundary between the hydraulic jump roller and the subcritical flow. Overall, the Pitot tube constitutes a low-cost alternative to more sophisticated techniques such as the optical-fibre probes or the PIV. This device was able to provide useful information regarding the performance of the model and has proven to deal better with bubbles and high velocities than other devices tested, like the Acoustic Doppler Velocimeter (ADV).

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}