
Ice Velocity in Upstream of Heilongjiang Based on UAV Low-Altitude Remote Sensing and the SIFT Algorithm


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
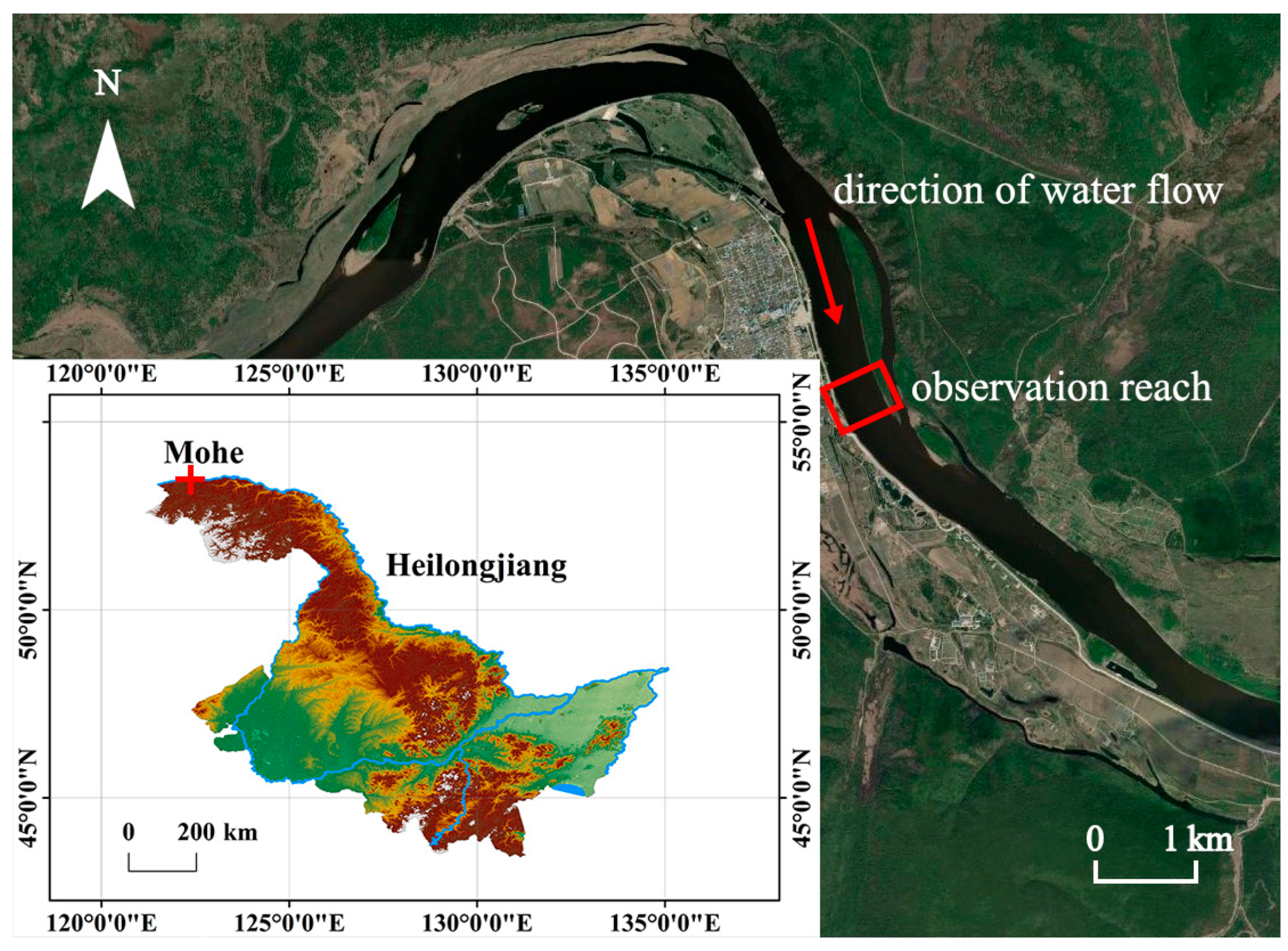
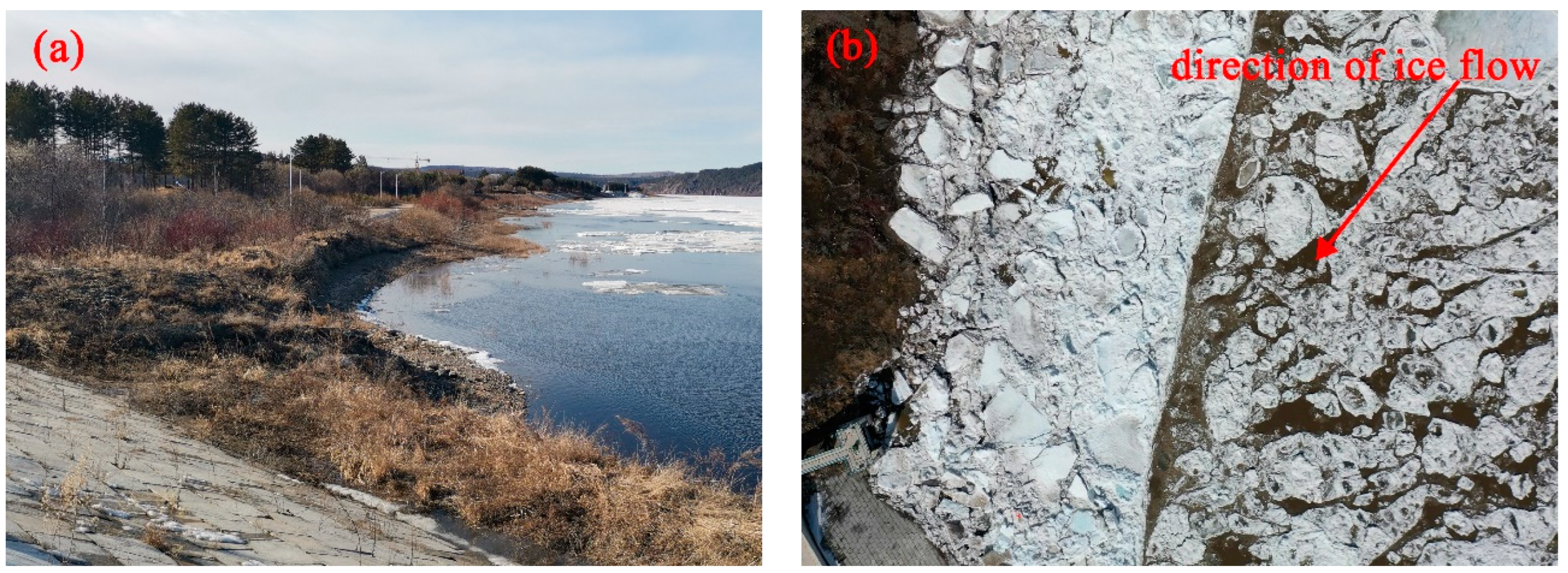
2.1. Overview of the Research Area
2.2. Research Method
2.2.1. Feature Point Selection
2.2.2. Feature Point Matching
2.2.3. Match Result Filtering
2.2.4. Ice Velocity Calculation
3. Results
4. Discussion
4.1. Ice Velocity Analysis
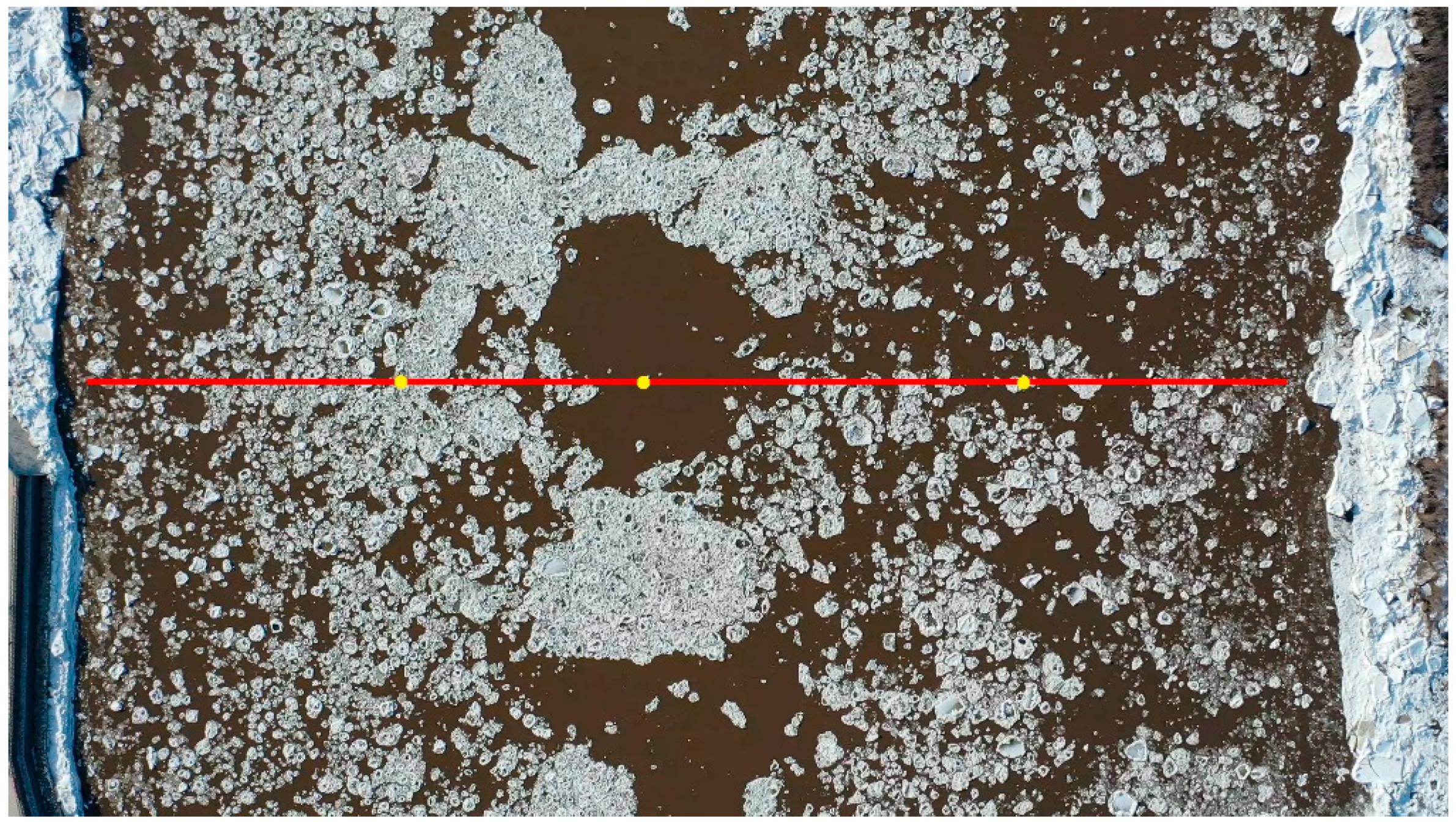
4.2. Ice Velocity Verification
5. Conclusions
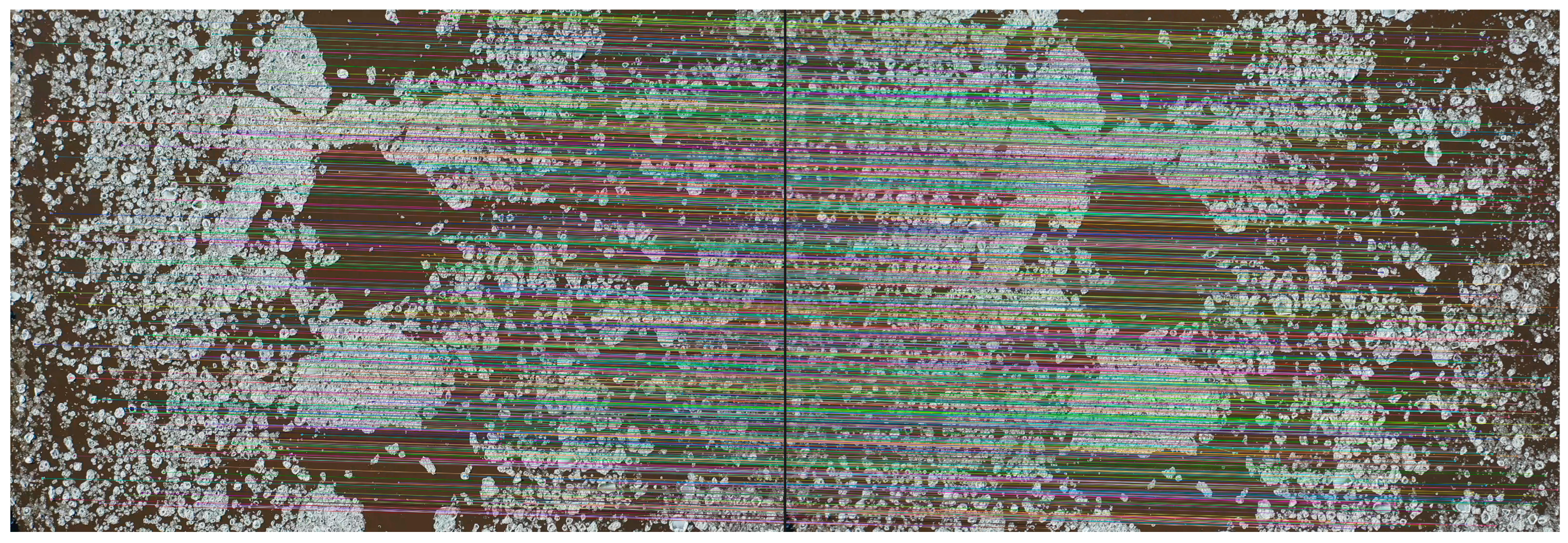
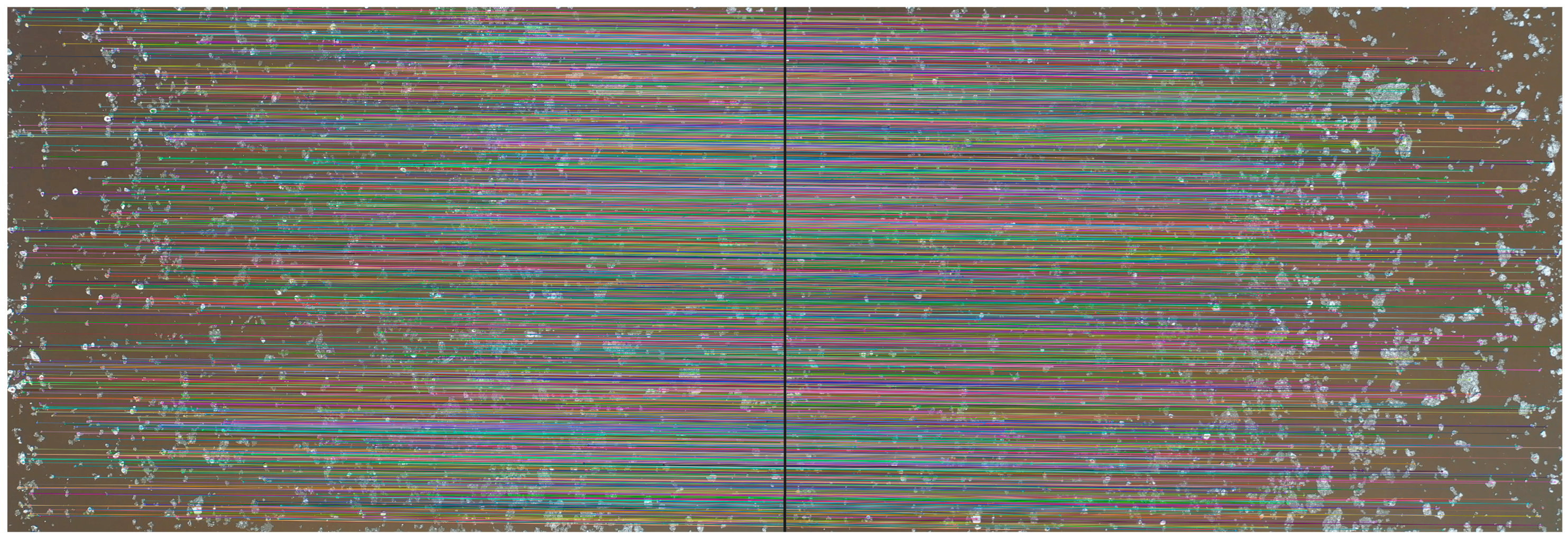
- Feature points were selected as local extreme points. Only ice surfaces, edges, and corners can produce dense and stable feature points. The SIFT algorithm provided the advantages of high precision and notable robustness. The SIFT and RANSAC algorithms were jointly employed to track the feature points, which realized ice velocity monitoring.
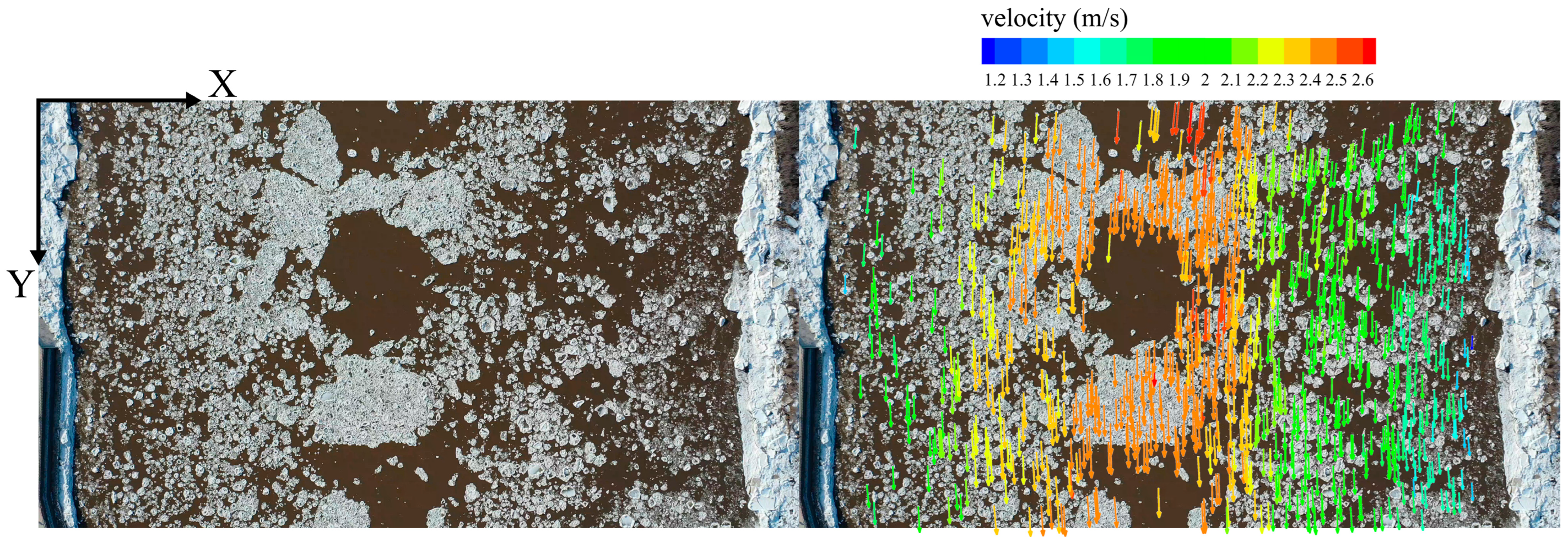
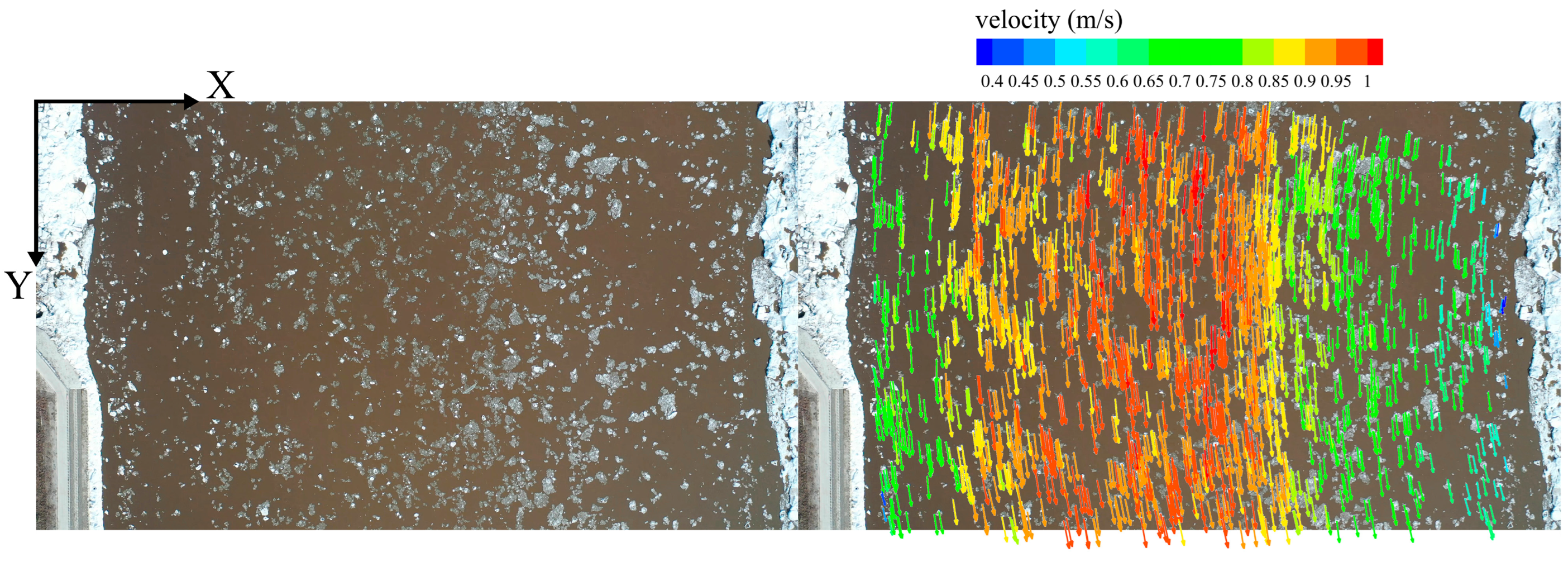
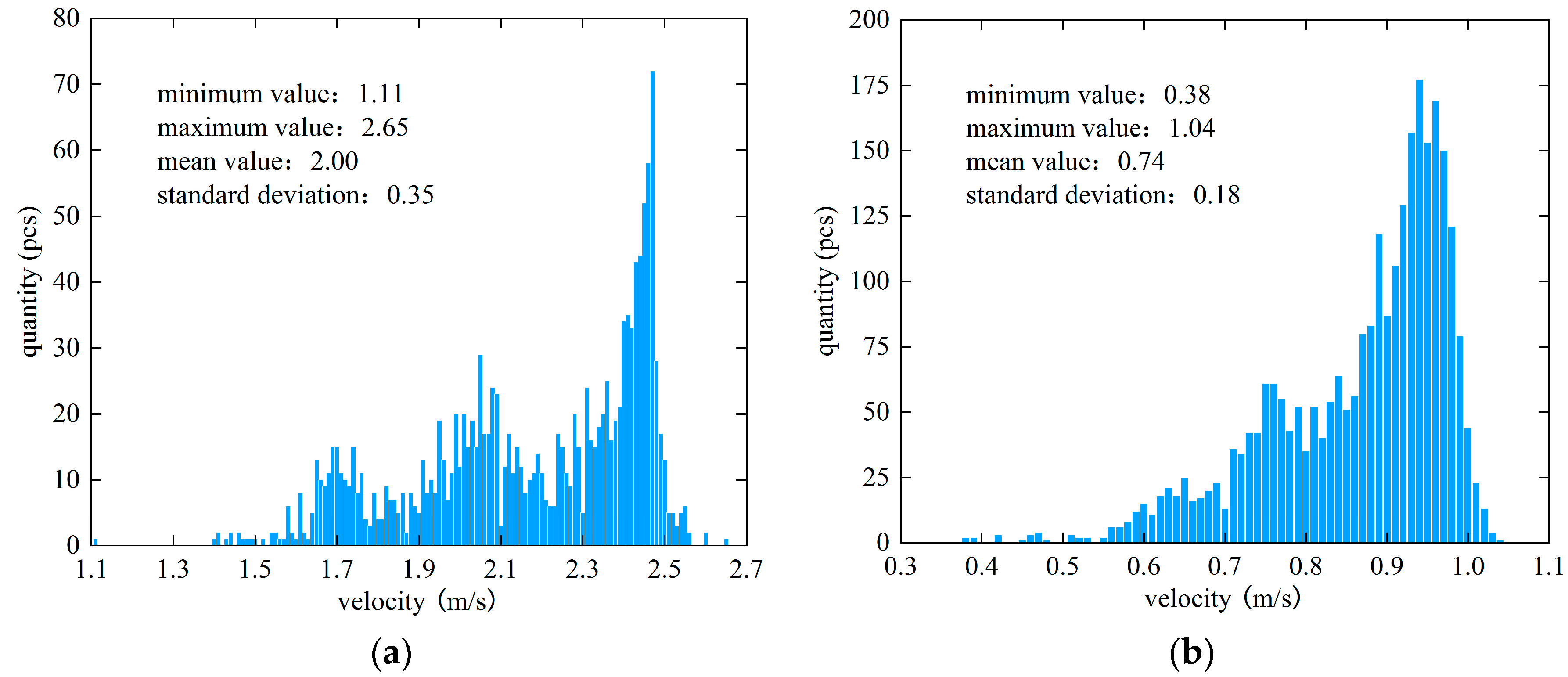
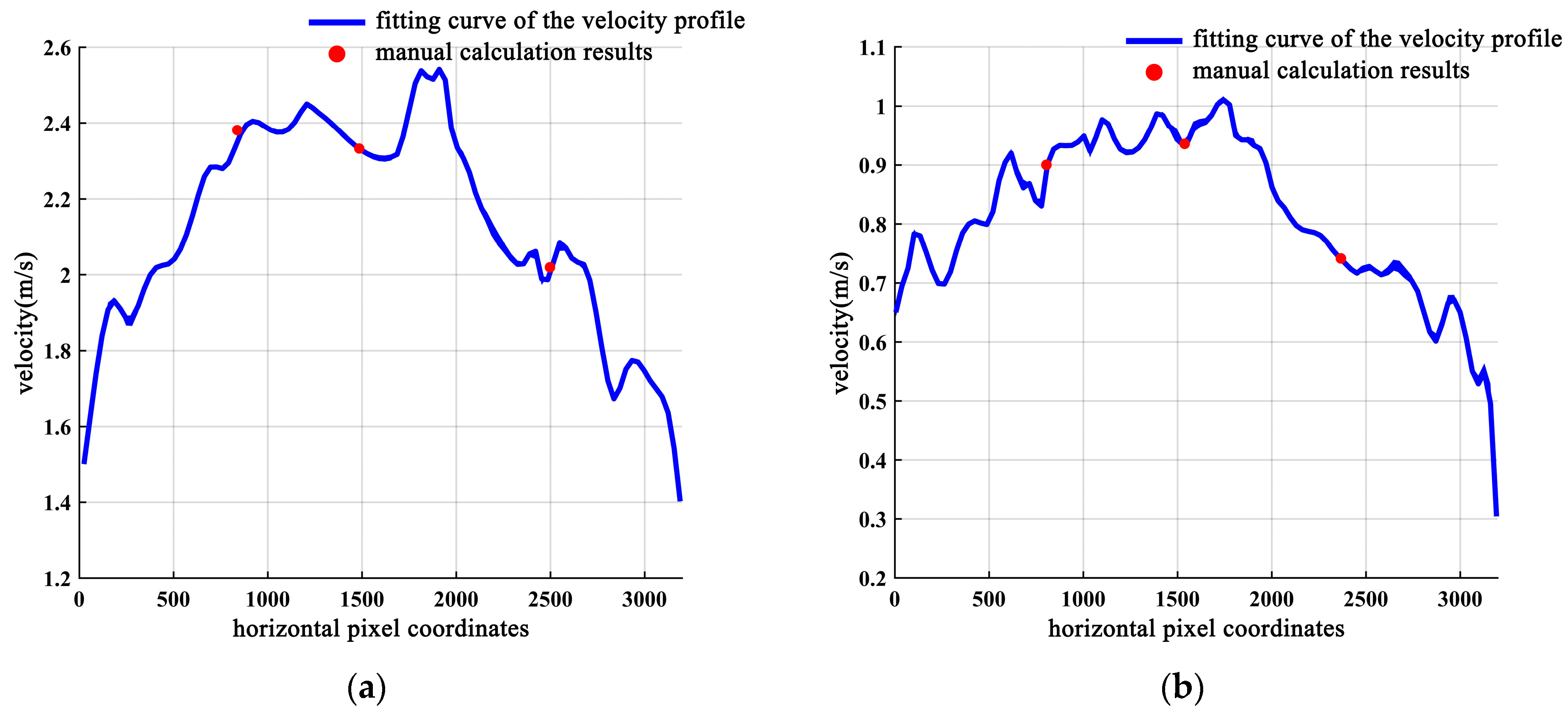
- At 16:00 on 25 April 2021, the ice velocity was mostly in the range 2.40~2.50 m/s, accounting for 30.02% of all velocity values. The maximum, minimum, and average ice velocities were2.65 m/s, 1.11 m/s, and 2.00 m/s, respectively. At 8:00 on 26 April 2021, the ice velocity was mainly in the range 0.90~1.00 m/s, accounting for 50.33% of all velocity values. The maximum, minimum, and average ice velocities were1.04 m/s, 0.38 m/s, and 0.74 m/s, respectively. The areas with the highest ice velocity in the studied reach were concentrated on the right side of the river center, and the ice velocity tended to decrease toward the banks on both sides. In addition, based on the ice velocity field, ice accumulation formation on the bank slope was highly related to the ice velocity.
- Under the influence of illumination changes and ice collisions, the local extreme points varied. The matching results were further screened with the RANSAC algorithm. The error between the ice velocity obtained with the SIFT algorithm and the manually calculated ice velocity was less than 0.02 m/s, which was in line with the actual situation.
- Compared to traditional ice velocity monitoring methods, the proposed method attained a high precision, and greatly reduced time and labor costs. The research method in this paper provides a new technical means for large-scale ice change information monitoring. In the future, we can perform further research on ice jams and ice dams based on this technique.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Goldberg, M.D.; Li, S.; Lindsey, D.T.; Sjoberg, W.; Zhou, L.; Sun, D. Mapping, Monitoring, and Prediction of Floods Due to Ice Jam and Snowmelt with Operational Weather Satellites. Remote Sens. 2020, 12, 1865. [Google Scholar] [CrossRef]
- Wang, J.; Shi, F.-y.; Chen, P.-p.; Wu, P.; Sui, J. Impact of bridge pier on the stability of ice jam. J. Hydrodyn. 2015, 27, 865–871. [Google Scholar] [CrossRef]
- Wang, R.; Huang, D.; Zhang, X.; Wei, P. Combined pattern matching and feature tracking for Bohai Sea ice drift detection using Gaofen-4 imagery. Int. J. Remote Sens. 2020, 41, 7486–7508. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Evaluation of existing image matching methods for deriving glacier surface displacements globally from optical satellite imagery. Remote Sens. Environ. 2012, 118, 339–355. [Google Scholar] [CrossRef]
- Dorrer, E.; Hofmann, W.; Seufert, W. Geodetic results of the Ross Ice Shelf Survey expeditions, 1962–1963 and 1965–66. J. Glaciol. 1969, 8, 67–90. [Google Scholar] [CrossRef]
- Manson, R.; Coleman, R.; Morgan, P.; King, M. Ice velocities of the Lambert Glacier from static GPS observations. Earth Planets Space 2000, 52, 1031–1036. [Google Scholar] [CrossRef] [Green Version]
- Chaouch, N.; Temimi, M.; Romanov, P.; Cabrera, R.; McKillop, G.; Khanbilvardi, R. An automated algorithm for river ice monitoring over the Susquehanna River using the MODIS data. Hydrol. Processes 2014, 28, 62–73. [Google Scholar] [CrossRef]
- Heygster, G.; Alexandrov, V.; Dybkjær, G.; Hoyningen-Huene, W.v.; Girard-Ardhuin, F.; Katsev, I.; Kokhanovsky, A.; Lavergne, T.; Malinka, A.; Melsheimer, C. Remote sensing of sea ice: Advances during the DAMOCLES project. Cryosphere 2012, 6, 1411–1434. [Google Scholar] [CrossRef] [Green Version]
- Shen, H.T.; Liu, L. Shokotsu River ice jam formation. Cold Reg. Sci. Technol. 2003, 37, 35–49. [Google Scholar] [CrossRef]
- Ozsoy-Cicek, B.; Kern, S.; Ackley, S.F.; Xie, H.; Tekeli, A.E. Intercomparisons of Antarctic sea ice types from visual ship, RADARSAT-1 SAR, Envisat ASAR, QuikSCAT, and AMSR-E satellite observations in the Bellingshausen Sea. Deep Sea Res. Part II 2011, 58, 1092–1111. [Google Scholar] [CrossRef]
- Gleason, S. Towards sea ice remote sensing with space detected GPS signals: Demonstration of technical feasibility and initial consistency check using low resolution sea ice information. Remote Sens. 2010, 2, 2017–2039. [Google Scholar] [CrossRef] [Green Version]
- Song, C.S.; Zhu, X.Y.; Han, H.W.; Lin, L.B.; Yao, Z. The influence of riverway characteristics on the generation and dissipation of ice dam in the upper reaches of Heilongjiang River. J. Hydrol. Eng. 2020, 51, 1256–1266. (In Chinese) [Google Scholar]
- Deng, X.; Wang, D.R.; Feng, J.; Zhang, L.; Qin, J.M. Image correction algorithm optimization and system design for ice density monitoring. J. Taiyuan Univ. Technol. 2020, 51, 310–315. (In Chinese) [Google Scholar]
- Bushaw, J.D.; Ringelman, K.M.; Johnson, M.K.; Rohrer, T.; Rohwer, F.C. Applications of an unmanned aerial vehicle and thermal-imaging camera to study ducks nesting over water. J. Field Ornithol. 2020, 91, 409–420. [Google Scholar] [CrossRef]
- Hunter III, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manag. Sci. 2020, 76, 1386–1392. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shafer, M.W.; Vega, G.; Rothfus, K.; Flikkema, P. UAV wildlife radiotelemetry: System and methods of localization. Methods Ecol. Evol. 2019, 10, 1783–1795. [Google Scholar] [CrossRef]
- Kalke, H.; Loewen, M. Support vector machine learning applied to digital images of river ice conditions. Cold Reg. Sci. Technol. 2018, 155, 225–236. [Google Scholar] [CrossRef]
- Wang, H.; Sun, J. Variability of Northeast China river break-up date. Adv. Atmos. Sci. 2009, 26, 701–706. [Google Scholar] [CrossRef]
- Fu, H.; Liu, Z.; Guo, X.; Cui, H. Double-frequency ground penetrating radar for measurement of ice thickness and water depth in rivers and canals: Development, verification and application. Cold Reg. Sci. Technol. 2018, 154, 85–94. [Google Scholar] [CrossRef]
- Guo, X.; Wang, T.; Fu, H.; Guo, Y.; Li, J. Ice-jam forecasting during river breakup based on neural network theory. J. Cold Reg. Eng. 2018, 32, 04018010. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Koenderink, J.J. The structure of images. Biol. Cybern. 1984, 50, 363–370. [Google Scholar] [CrossRef] [PubMed]
- Lindeberg, T. Detecting salient blob-like image structures and their scales with a scale-space primal sketch: A method for focus-of-attention. Int. J. Comput. Vision 1993, 11, 283–318. [Google Scholar] [CrossRef] [Green Version]
- Divya, S.; Paul, S.; Pati, U.C. Structure tensor-based SIFT algorithm for SAR image registration. IET Image Process. 2019, 14, 929–938. [Google Scholar] [CrossRef]
- Chang, L.; Duarte, M.M.; Sucar, L.E.; Morales, E.F. A Bayesian approach for object classification based on clusters of SIFT local features. Expert Syst. Appl. 2012, 39, 1679–1686. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, X.; Gao, C.; Qiu, X.; Tian, Y.; Zhu, Y.; Cao, W. Rapid mosaicking of unmanned aerial vehicle (UAV) images for crop growth monitoring using the SIFT algorithm. Remote Sens. 2019, 11, 1226. [Google Scholar] [CrossRef] [Green Version]
- Saxena, A.; Jat, M.K. Analysing performance of SLEUTH model calibration using brute force and genetic algorithm–based methods. Geocarto Int. 2020, 35, 256–279. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, Y.; Wang, J.; Gao, W. An improved FAST feature extraction based on RANSAC method of vision/SINS integrated navigation system in GNSS-denied environments. Adv. Space Res. 2017, 60, 2660–2671. [Google Scholar] [CrossRef]
- Chave, R.A.J.; Lemon, D.D.; Fissel, D.B.; Dupuis, L.; Dumont, S. Real-time measurements of ice draft and velocity in the St. Lawrence River. In Proceedings of the Oceans’ 04 MTS/IEEE Techno-Ocean’04 (IEEE Cat. No. 04CH37600), Kobe, Japan, 9–12 November 2004; pp. 1629–1633. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, E.; Hu, S.; Han, H.; Li, Y.; Ren, Z.; Du, S. Ice Velocity in Upstream of Heilongjiang Based on UAV Low-Altitude Remote Sensing and the SIFT Algorithm. Water 2022, 14, 1957. https://doi.org/10.3390/w14121957
Wang E, Hu S, Han H, Li Y, Ren Z, Du S. Ice Velocity in Upstream of Heilongjiang Based on UAV Low-Altitude Remote Sensing and the SIFT Algorithm. Water. 2022; 14(12):1957. https://doi.org/10.3390/w14121957
Chicago/Turabian StyleWang, Enliang, Shengbo Hu, Hongwei Han, Yuang Li, Zhifeng Ren, and Shilin Du. 2022. "Ice Velocity in Upstream of Heilongjiang Based on UAV Low-Altitude Remote Sensing and the SIFT Algorithm" Water 14, no. 12: 1957. https://doi.org/10.3390/w14121957
APA StyleWang, E., Hu, S., Han, H., Li, Y., Ren, Z., & Du, S. (2022). Ice Velocity in Upstream of Heilongjiang Based on UAV Low-Altitude Remote Sensing and the SIFT Algorithm. Water, 14(12), 1957. https://doi.org/10.3390/w14121957