1. Introduction
Crop evapotranspiration (ETc, also denoted as LE) represents the rate of water vapour loss to the atmosphere from plants (transpiration) and soil (evaporation). Hence, sound knowledge of ETc is vital for hydrological and weather modelling, water resources management, and irrigation decision-making.
Crop evapotranspiration can be determined using different approaches. In modern agricultural practice, the recommended method estimates the reference evapotranspiration, ET
0, from standard meteorological data and multiplies it by a crop coefficient [
1]. The most common method for estimating ET
0 is the Penman-Monteith (PM) FAO56 equation [
1]. This method considers ET
0 as the evapotranspiration from a well-irrigated hypothetical grass, uniformly covering an infinite horizontal flat surface. Field experiments determine the crop coefficient empirically, and corresponding tables are available for many conventional crops worldwide [
1].
The PM-FAO56 approach is quite simple since it can determine ET
0 from a standard meteorological station near the field of interest. Therefore, this approach became highly popular among growers. However, unavoidable differences between the local crop microclimate and that measured by a nearby weather station may cause significant inaccuracies in estimating ETc from ET
0. Moreover, the tabulated crop coefficient data are based on average conditions and may not accurately represent the plants’ specific status. Another approach for estimating ETc applies the Penman-Monteith equation, using local microclimate data and crop-specific aerodynamic and surface resistances. This method can provide reliable data on actual ETc; for example, Katerji and Rana [
2] showed that estimating ETc by the Penman-Monteith equation provided more accurate data than the PM-FAO56 for six irrigated crops under Mediterranean conditions. However, this approach requires crop-specific data that is not always easy to collect under routine field operations.
Another modelling approach that has become more and more popular in the research community utilizes machine learning methods. In these models, a target value of ETc is determined, either through direct measurement or through the PM-FAO56 approach. Then, a set of input meteorological and crop variables corresponding to the target value is used to train a system that builds a mathematical function connecting the input variables and the target. The output obtained from this function is compared with actual data, and the network fine-tunes the function until it provides an estimate with satisfactory accuracy. This stage is called either training or learning. In the validation stage that follows the learning, input meteorological values that were not included in the training phase are used, and the estimated ETc is compared against measured values. Usually, R2, RMSE (root mean square error) and MAE (mean absolute error) of a linear regression between calculated and measured daily or half-hourly ETc values are used to evaluate the model’s performance.
A popular model of the above type is the artificial neural network (ANN). This non-linear statistical technique resembles the human brain’s neural network in building the mathematical relations among input variables and the target. The system consists of input and output layers with intermediate hidden layers, each with several neurons [
3].
Several studies examined the ANN model for estimating the reference evapotranspiration, ET
0. In the study by Zanetti et al. [
4], the main goal was to evaluate the model’s performance using minimum input climate data. Their analysis used data from two standard meteorological stations in Brazil. The results showed good agreement between ET
0 estimated by ANN and by the PM-FAO56 method. Moreover, they showed that using only the minimum and maximum daily air temperatures as input variables, satisfactory results of ET
0 could be obtained. An approach combining a neural network (NN) and fuzzy logic (FL) for estimating ET
0 was also examined [
5]. The input data included daily solar radiation, relative humidity, air temperature, and wind speed, collected from a wide variety of climates. They [
5] showed that the combined new approach (NN + FL) was in better agreement with evapotranspiration measured from a grass-covered lysimeter that simulated ET
0 than the traditional PM-FAO56 model. Laaboudi et al. [
3] examined the effectiveness of artificial neural networks (ANNs) for evaluating ET
0, using data of meteorological stations in the region of Adrar Province, Algeria. They analysed different neural network structures and found that the network with two hidden layers and eight neurons per layer provided the best results. Manikumari et al. [
6] used the deep learning neural network (DLNN) methodology to estimate ET
0 in India’s rice cultivation region, using climatic conditions from standard meteorological stations. This study showed superior performance of the DLNN model over other types of ANN models and the PM-FAO56. Deep learning methods were also examined by Chen et al. [
7], who examined three DL models, namely, deep neural networks (DNNs), temporal convolution neural networks (TCNs) and long short-term memory neural network (LSTMs) to estimate daily reference evapotranspiration with incomplete meteorological data. Their results showed that generally, the methods examined outperformed classical empirical models for estimating ET
0. Tikhamarine et al. [
8] examined five novel hybrid machine-learning approaches to estimating monthly reference evapotranspiration in two different regions: India and Algeria. Results showed that the model ANN-GWO (ANN-grey wolf optimizer) provided better results than the others using five input variables: min/max temperature, relative humidity, wind speed and solar radiation. Satisfactory results were also obtained by these models using only three input variables: min/max temperature and solar radiation.
The above studies used an ANN to estimate the reference evapotranspiration, ET
0, not the actual one, ETc. Kelley et al. [
9] used the eddy-covariance method to measure ETc over various field crops. An ANN was trained to estimate ETc utilizing the output from nearby standard meteorological sensors. Results of the ANN prediction were in accord with those calculated by the PM equation under most conditions. In a more recent study, actual crop evapotranspiration, ETc, from vegetable beans and hazelnuts was measured by eddy-covariance and estimated by ANN [
10]. Results showed that this approach robustly estimated ETc using input data of the four major climatic variables: air temperature, solar radiation, air humidity, and wind speed, and a training period as short as one week. Chen et al. [
11] used a temporal convolution network (TCN), which is a new form of convolution neural network, to predict daily ETc of maize under mulched drip irrigation conditions. The data were collected in a two-year field study with lysimeters. Predictions were also used to estimate the crop coefficient and compare it with literature data (FAO-56) for maize. The results [
11] suggested that the seven variables of plant height, mean temperature, maximal temperature, relative humidity, solar radiation, leaf area index and soil temperature mostly affected maize evapotranspiration. The TCN model predicted daily ETc with R
2 and MSE in the ranges 0.91–0.95 and 0.144–0.296 mm d
−1 respectively. A comparative study of different machine learning algorithms was carried out by Granata [
12]. The models predicted actual evapotranspiration from grass pastures at a Central Florida site, using different combinations of the input variables. Actual evapotranspiration measurements were done by the eddy covariance method. The study [
12] concluded that it is possible to build a reliable machine-learning model to predict ETc with mean temperature, net radiation and relative humidity as input variables.
Another method within the machine learning family is multiple linear regression (MLR). The method assumes a linear relationship between each of the input variables and the target. The model adjusts the coefficients of the linear functions to obtain satisfactory accuracy in the estimation of the target. Laaboudi et al. [
3] compared the performance of ANN and MLR on the same data set and demonstrated the superiority of ANN in predicting ET
0. For example, during the validation phase, R
2 for ANN and MLR were 1.00 and 0.95, while corresponding values of RMSE were 0.17 and 0.49 mm day
−1, respectively. Adamala [
13] compared ANN and MLR in estimating daily ET
0 from data of 15 meteorological stations in India. Their results showed that ANN models performed better than the MLR models for 14 out of the 15 locations. This finding was confirmed by both higher values of R
2 and lower values of RMSE (mm day
−1).
ANN and MLR models’ performance was also compared in estimating evaporation from water reservoirs. Although evaporation is not precisely the same process as evapotranspiration, both describe similar physical processes of water phase change from liquid to vapour and water vapour transport from the biosphere to the atmosphere. For example, Deswal and Pal [
14] made such a comparison and indicated that ANN performed better than MLR in evaporation predictions.
Undoubtedly, the actual routine measurement of ETc is preferable over modelling and could provide more reliable data for irrigation management. Measurement techniques are based on soil, plant, or atmospheric approaches. One popular method is the lysimeter, which measures water vapor loss from a potted plant [
15]. In this method, soil evaporation and plant transpiration are monitored through the temporal change in the pot weight. Another method is the heat-pulse [
16,
17], which measures transpiration only based on quantifying the sap flow rate in plant stems. Under conditions of low evaporation, e.g., when plant cover fraction is high, transpiration can be considered nearly equal to evapotranspiration. Another family of methods, generally called atmospheric methods, measures the vertical flux of water vapour through the surface boundary layer above the crop. The most common and reliable of these methods is the eddy-covariance, which can provide continuous data over long periods [
18,
19].
While all ETc measurement techniques can provide reliable and continuous data, they are costly and complex to operate, and hence, unattainable for day-to-day irrigation management by farmers. Therefore, they are mainly used for research purposes, and a more straightforward approach is sought for practical irrigation management.
The increased use of cultivation in protected systems, such as greenhouses and screenhouses [
20,
21,
22,
23,
24] enhanced the challenge of reliable ETc estimations under these confined environments. Crops in such structures are isolated at different levels from the external environment [
21], such that the crop microclimate can be significantly different from that outside. Furthermore, the physical conditions in protected environments are usually different from those of the hypothetical grass crop used to estimate ET
0 in the PM-FAO56 model. Hence, estimating ETc through ET
0 [
1] in protected cultivation systems, might be even more erroneous than in the open field.
The screenhouse is a protected cultivation structure that envelopes the crop with a porous screen deployed on the roof and sidewalls. Screen properties such as porosity and texture [
25] determine the effect of the cover on the crop microclimate and water use. Its low cost, as compared to greenhouses, along with its contribution to increased yield and product quality, make it highly popular in many regions of the world [
26]. Screenhouses can be classified as insect-proof or shading [
22]. Insect-proof screens are very dense, thus avoiding the penetration of insects onto the crop and reducing pesticide application. On the other hand, shading screens have a higher porosity, which mildly affects the internal microclimate conditions.
In both insect-proof and shading screenhouses, the porous screen modifies the crop microclimate variables such as solar radiation, wind speed, air temperature, and air relative humidity. Changing these variables usually reduces the evaporative demand and hence the crop evapotranspiration. Consequently, irrigation demand is lower than in the open field. For example, in a study on pepper evapotranspiration in an insect-proof screenhouse, Möller et al. [
16] showed that inside measured ETc was about 40% of that calculated outside. Measurements in a shading banana screenhouse [
27] showed that inside measured ETc was about 66% of external ET
0, implying potential water saving. A long-term irrigation trial in a banana screenhouse in the Jordan Valley region of Northern Israel showed that irrigation could be reduced by about 30% without significantly reducing yield [
28], thus increasing the water use efficiency of banana production.
The above review highlights the challenge of determining ETc for irrigation management, especially in screenhouse-protected cultivation systems where the internal microclimate is different from the outside. Direct ETc measurements require expensive sensors and are complex and hence not applicable for day-to-day use by farmers. On the other hand, various machine learning modelling approaches exist that require different types of data. However, in the scientific literature, these models were mostly applied for crops under open field conditions. The knowledge gap that this study aims to bridge is using existing machine learning approaches to estimate the evapotranspiration of crops cultivated in the screenhouse environment. Hence, the primary goal of this study was to elaborate machine learning modelling approaches to ETc in large banana screenhouses. The main particular aims were: (i) to compare the performances of two types of machine-learning models, namely, artificial neural network and multiple linear regression, derived from data collected in field measurements; (ii) to examine the models’ performances under limited input data; and (iii) to examine the effect of short training periods on the models’ performances.
4. Summary and Discussion
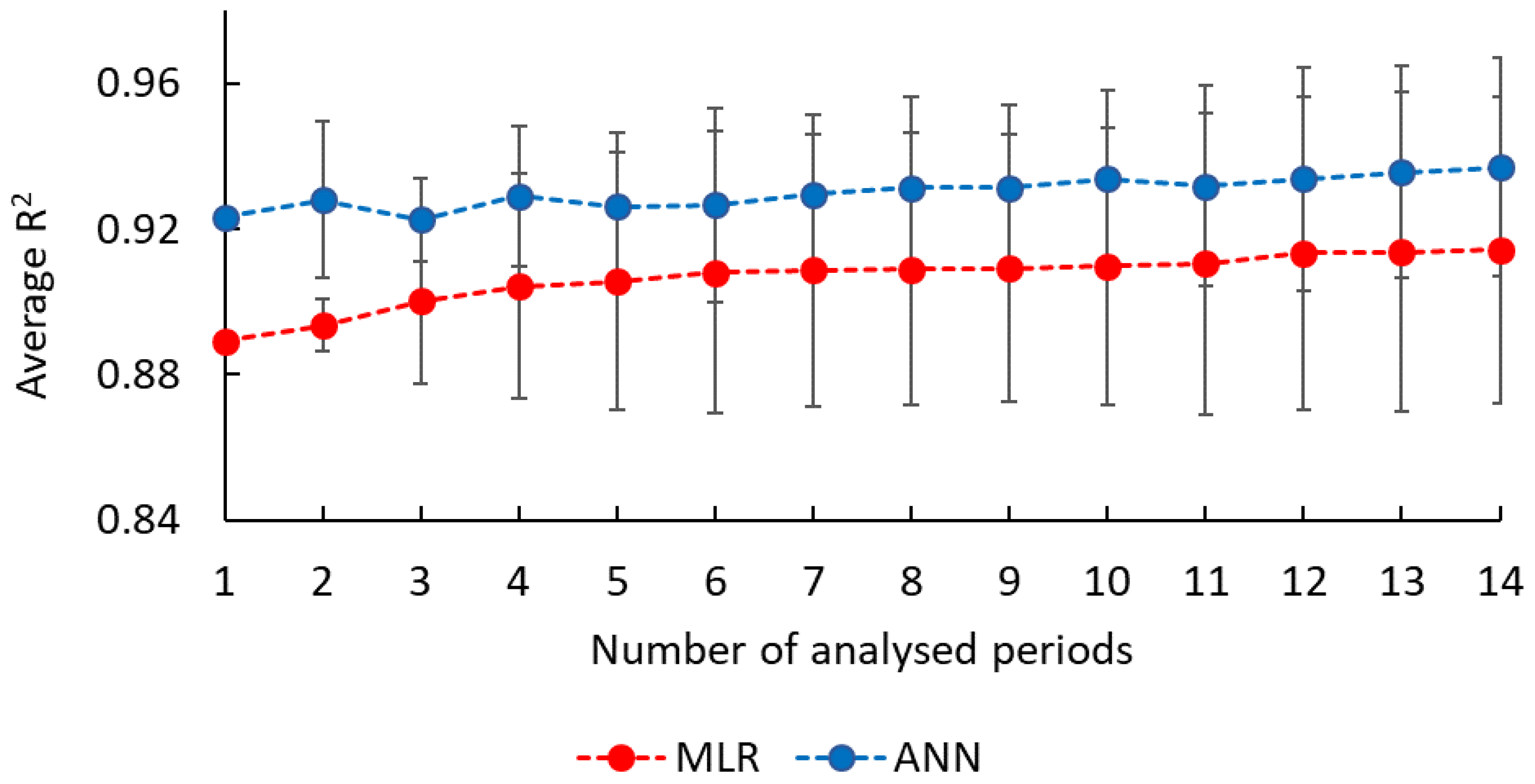
Applying the models using the complete data set for training and validating is not common in machine learning studies. Usually, part of the data is used for training and the rest for validation. However, the first analysis in this study was performed on the whole data set to establish a best-case reference for the further analyses, in which only part of the data was used for training. This analysis showed that the ANN model was superior to the MLR, with R
2 = 0.92 and 0.89, RMSE = 37.5 and 45.1 W m
−2 and MAE = 21.0 and 27.2 W m
−2, respectively. This result agrees with Adamala [
13], who showed the superiority of ANN over MLR in estimating daily ET
0 in India.
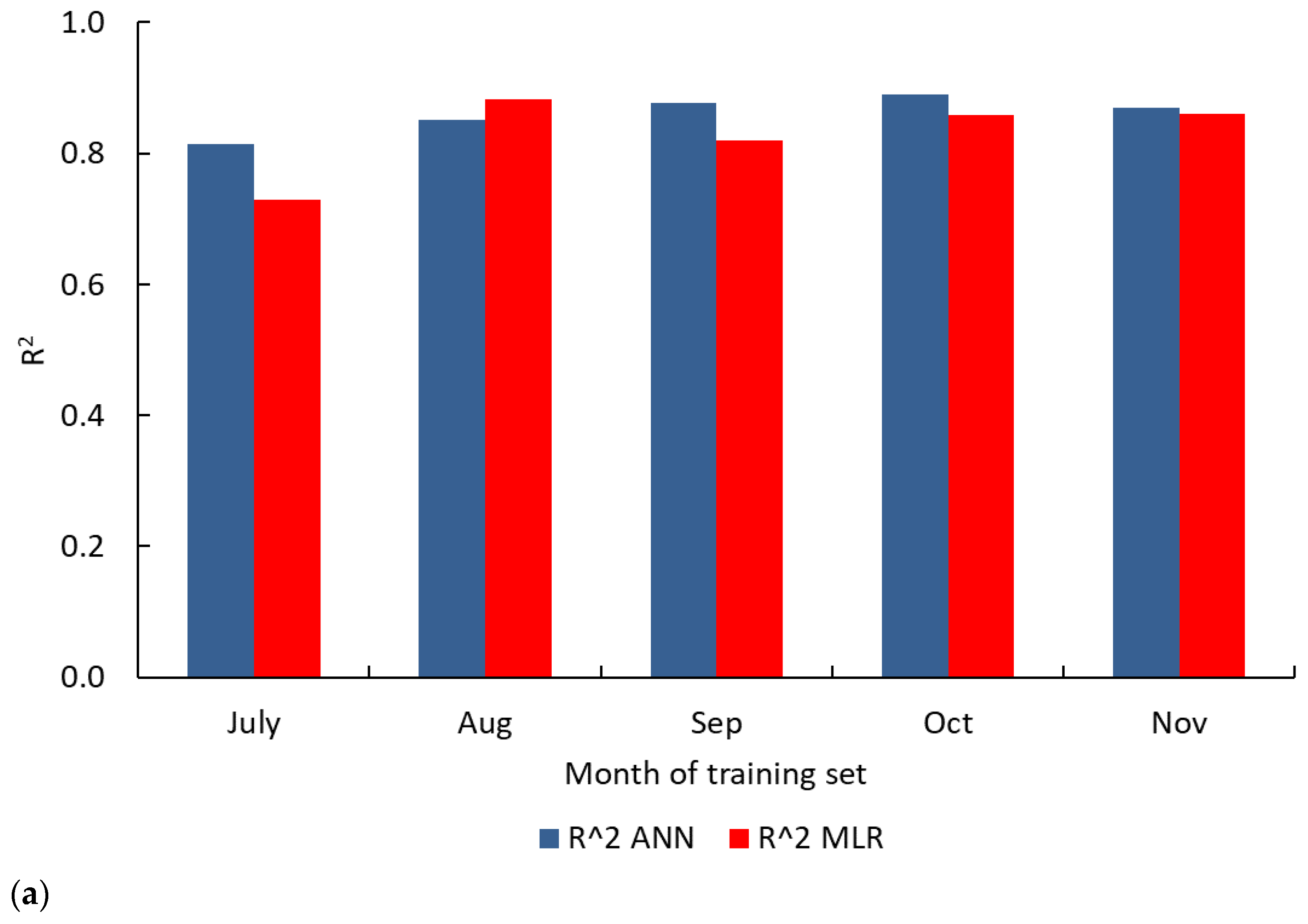
Training ANN evapotranspiration models requires data acquisition of field measurements using complex and expensive methods, e.g., the eddy covariance system [
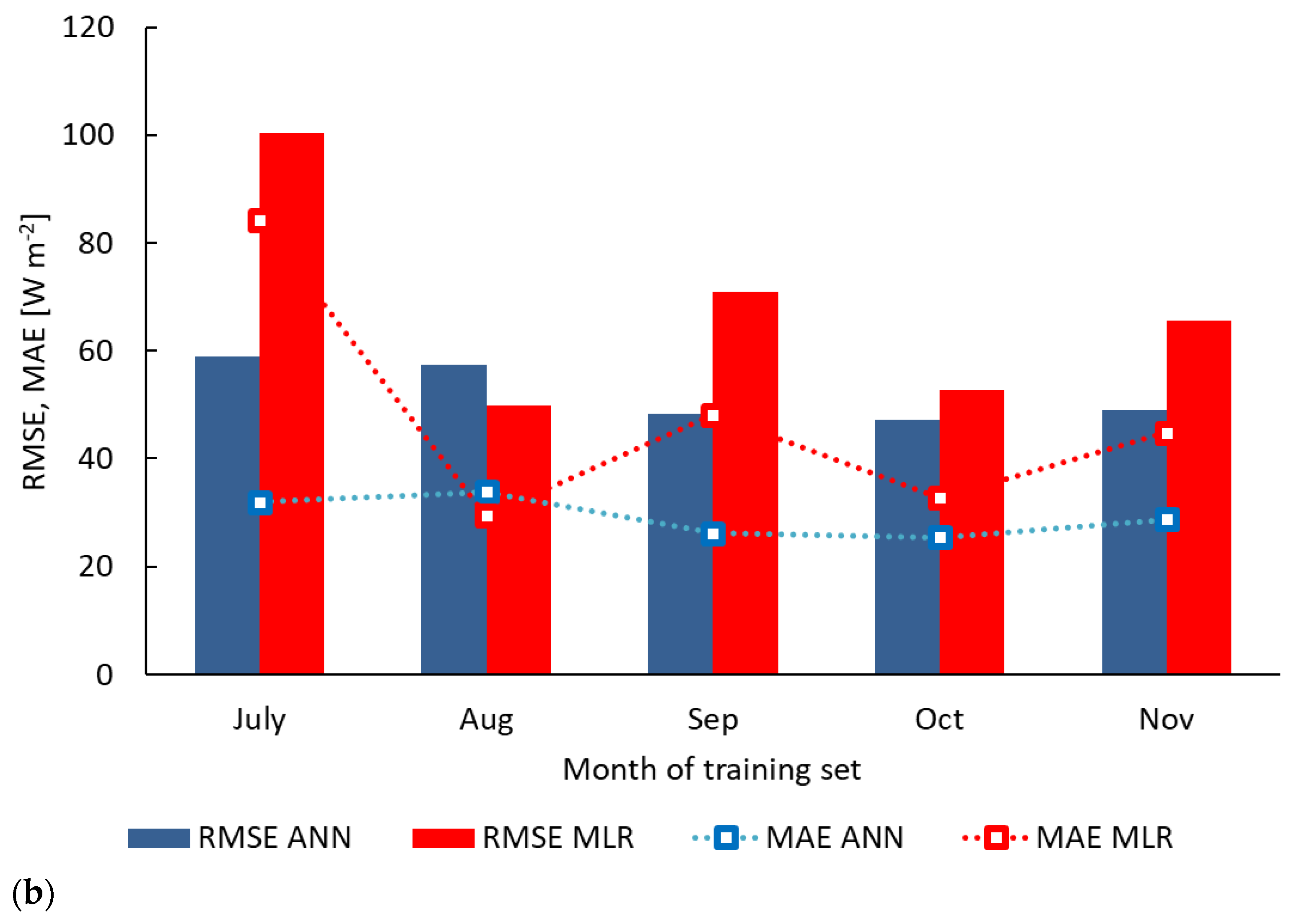
37]. Hence, from a practical point of view, it is of interest to examine the model performance with short training periods. In this study, model performance was examined with one-month and one-week training periods. Running the models using a one-month training period in 2017 showed that ANN was superior to MLR (
Figure 3) except when August data was used for training, where MLR performed better than ANN. Specifically, training the ANN model using October data provided the highest R
2 = 0.89 (only slightly lower than 0.92 obtained with the whole data set) and lowest values of RMSE and MAE, 47.3 and 25.4 W m
−2 respectively. On the other hand, training the ANN model using July 2017 data provided the lowest R
2 = 0.81.
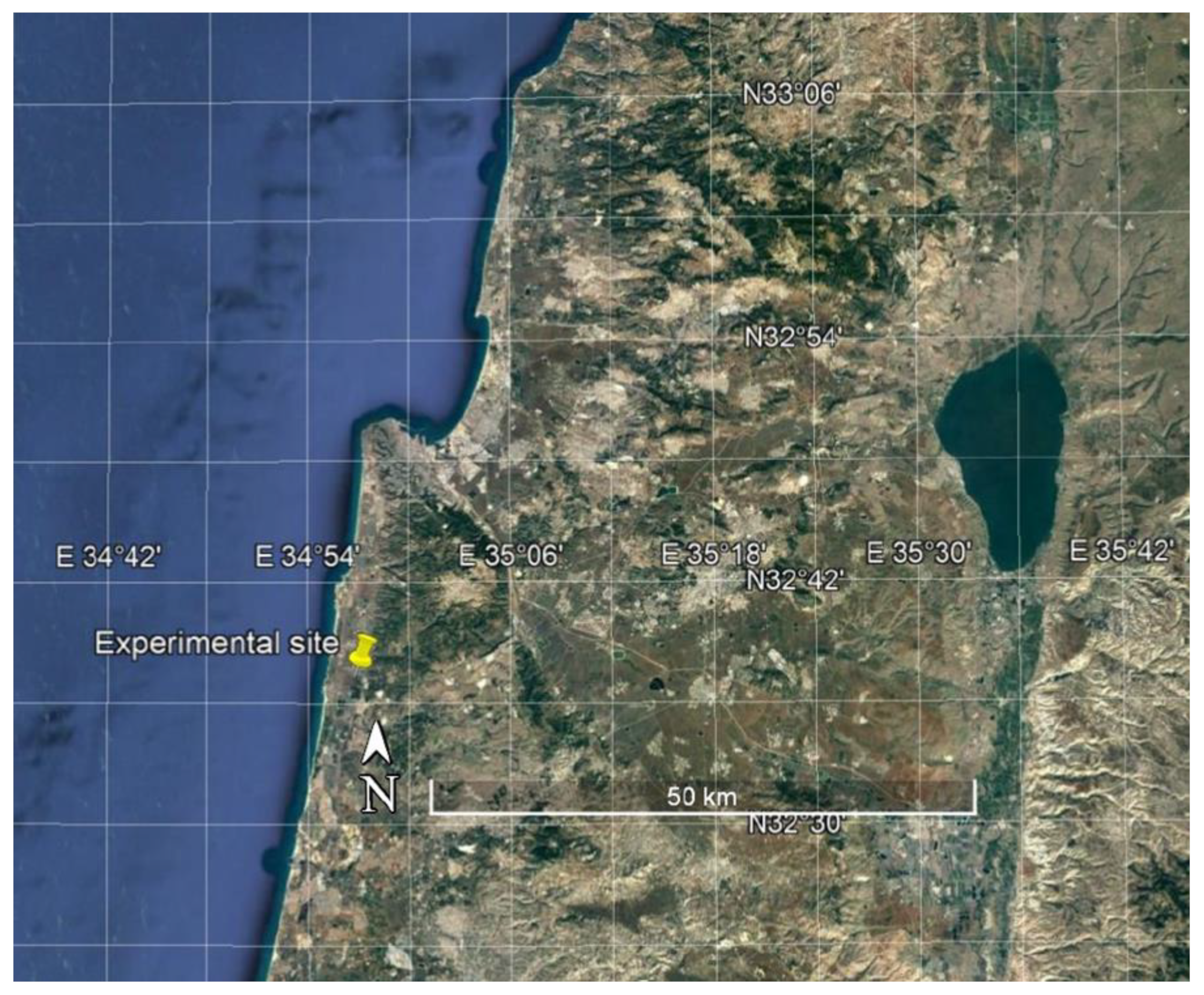
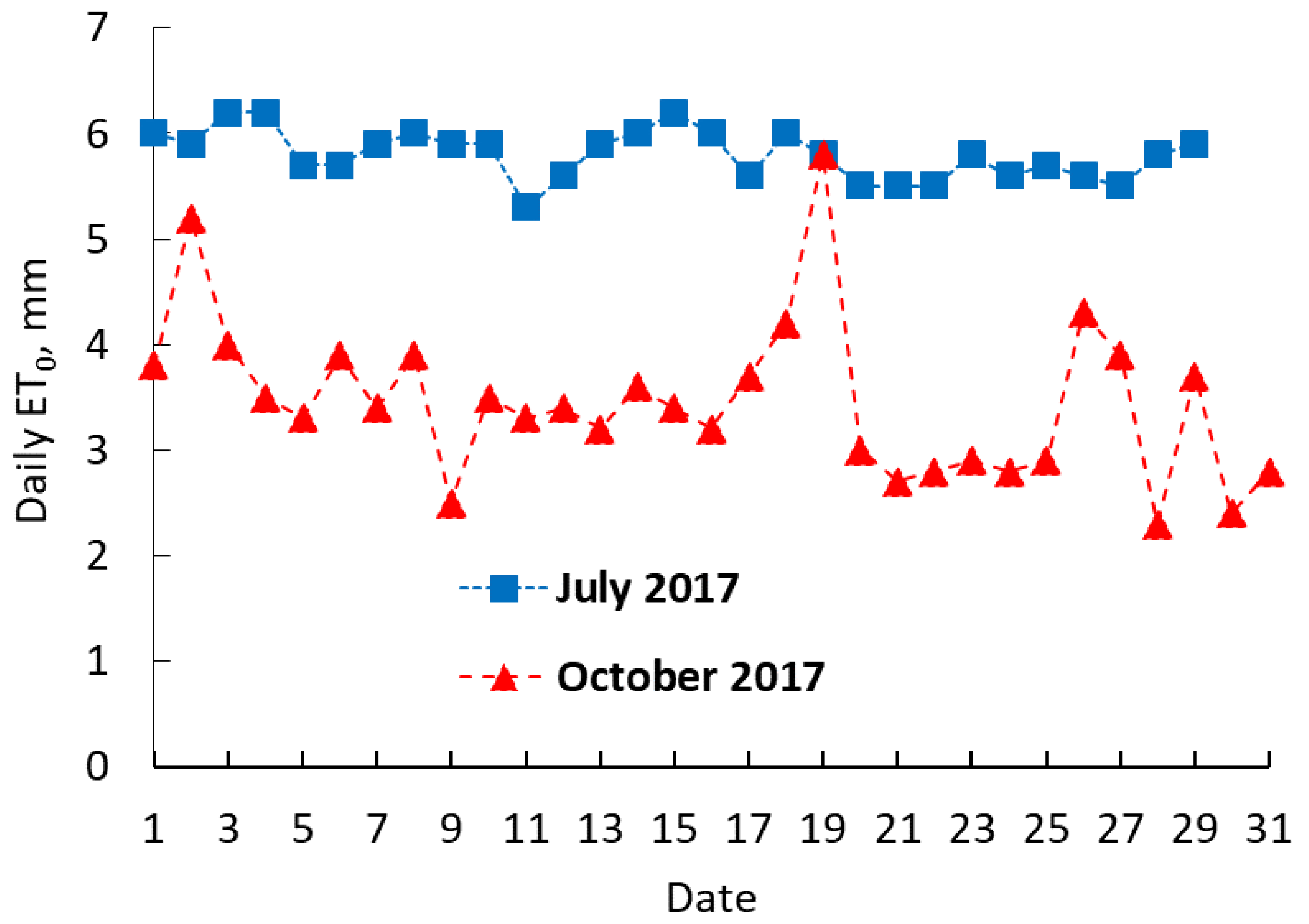
A possible reason for this difference is that at the experimental site, weather conditions are much more variable during October than during July, which provided a training dataset for a more reliable model. To illustrate this difference, we analysed the reference evapotranspiration, ET
0, from a nearby meteorological station operated by the IMS—Israel Meteorological Service—during October and July 2017. We chose ET
0 for this comparison because it represents an integrated measure of weather conditions. The results of this analysis are presented in
Figure 9. The results show a much larger variability of weather conditions in October than in July, which supports the improved performance of the model when trained using October rather than July data.
The MLR model performance was best when trained using August 2017 data (
Figure 3); which gave R
2 = 0.88, RMSE = 49.9 W m
−2 and MAE = 29.4 W m
−2. August weather in Israel is rather monotonous without much variability, which implies that such conditions are advantageous for the MLR model. This result is different from the ANN model, where variable weather conditions during October were presumably favourable. This difference between the two methods requires further research.
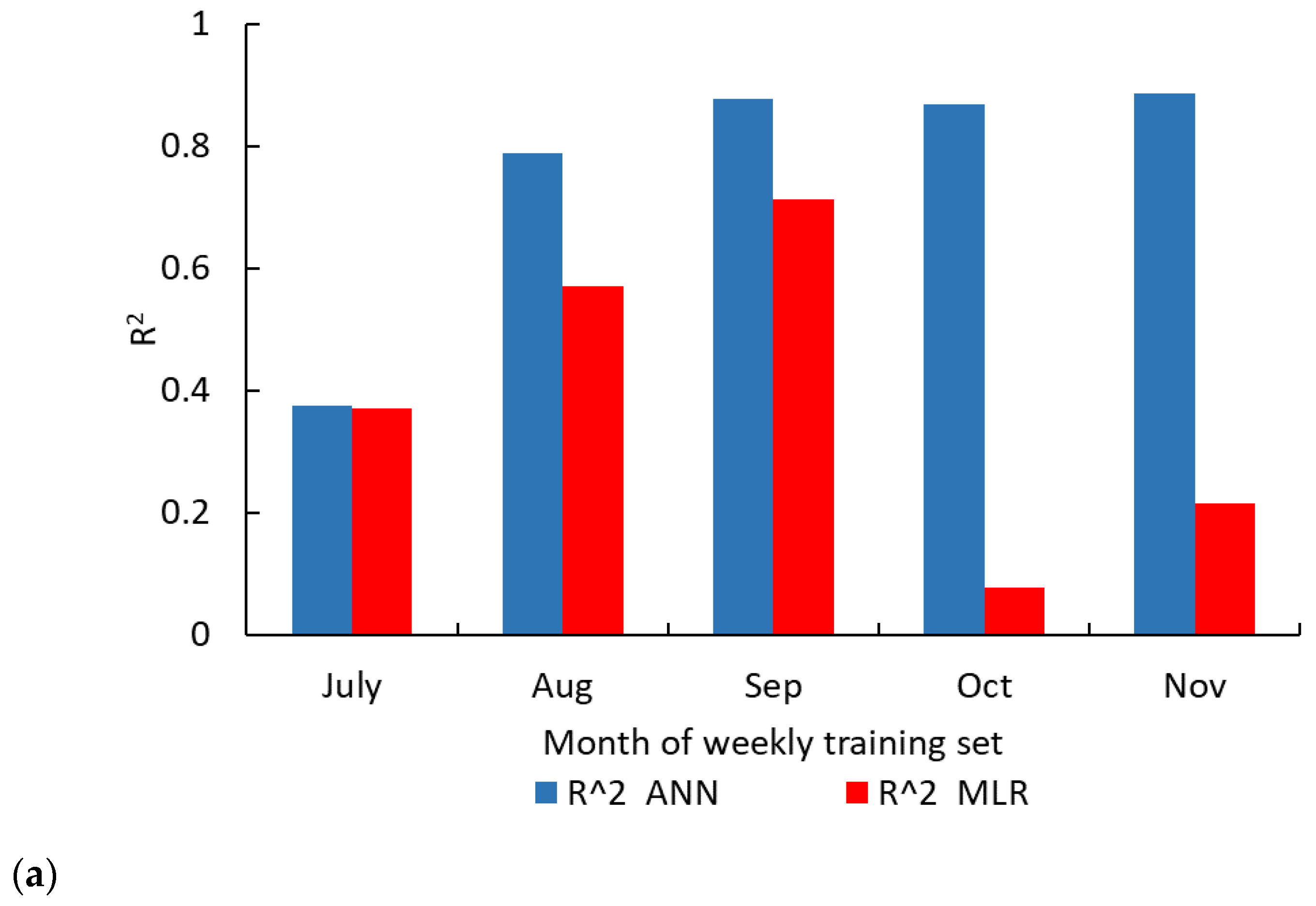
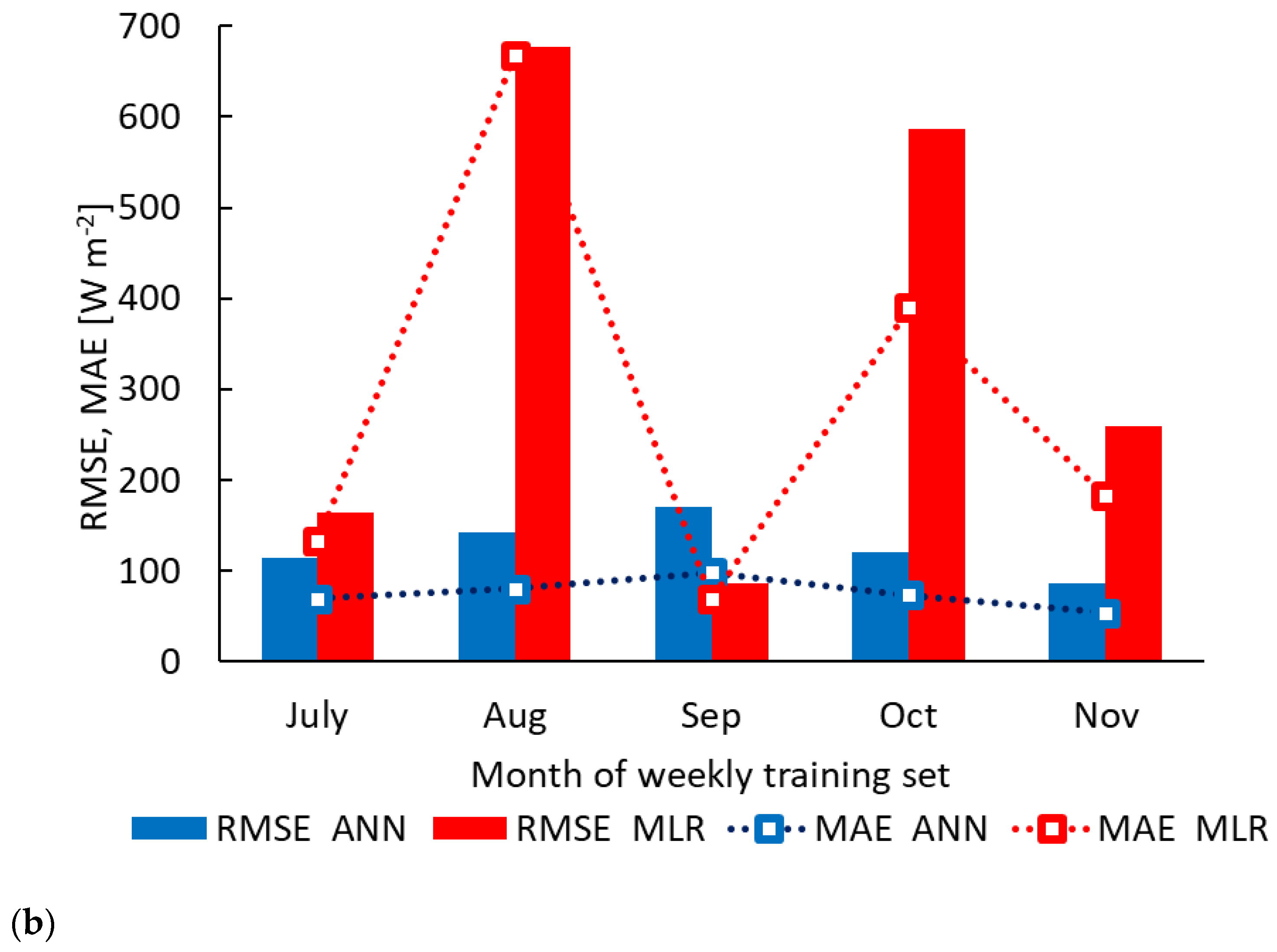
Analysis was also performed using a one-week training period. The results in
Figure 4 showed that when the one-week training period used September, October, and November data, the ANN model’s performance (R
2) was higher than during July and August. Again, this can be explained by the diverse weather during the autumn months (September, October and November) compared to the uniform weather during the summer months of July and August. Regarding the MLR model, R
2 with training during a week in October and November was lower than during July, August, and September. Similar to the results for one-month training, this result of the MLR model is opposite to that obtained with the ANN model and deserves further research.
The ability of the ANN model to provide satisfactory R
2 with one-week training in certain months is in agreement with Kelley and Pardyjak [
10], who showed high performance of an ANN model that was trained during seven days under open field conditions. Kelley and Pardyjak [
10] also highlighted that robust estimation could be obtained, provided climatic and field conditions of the seven-day training period were similar to those during data validation.
A comparison between the results obtained with one month (
Figure 3) and one week (
Figure 4) training shows that using data of September, October, and November, R
2 of the ANN model is approximately the same for the two training periods, weekly and monthly. However, the RMSE and MAE of the ANN model trained with a one-month data set are significantly lower (indicating better performance) than those of the ANN model trained with a one-week data set. The ANN model trained during one month generated a much higher R
2 than the model trained during one week using July and August data. For the MLR model, training using one-month data yielded higher R
2 and lower RMSE and MAE than training using one-week data, regardless of the month or week chosen for training.
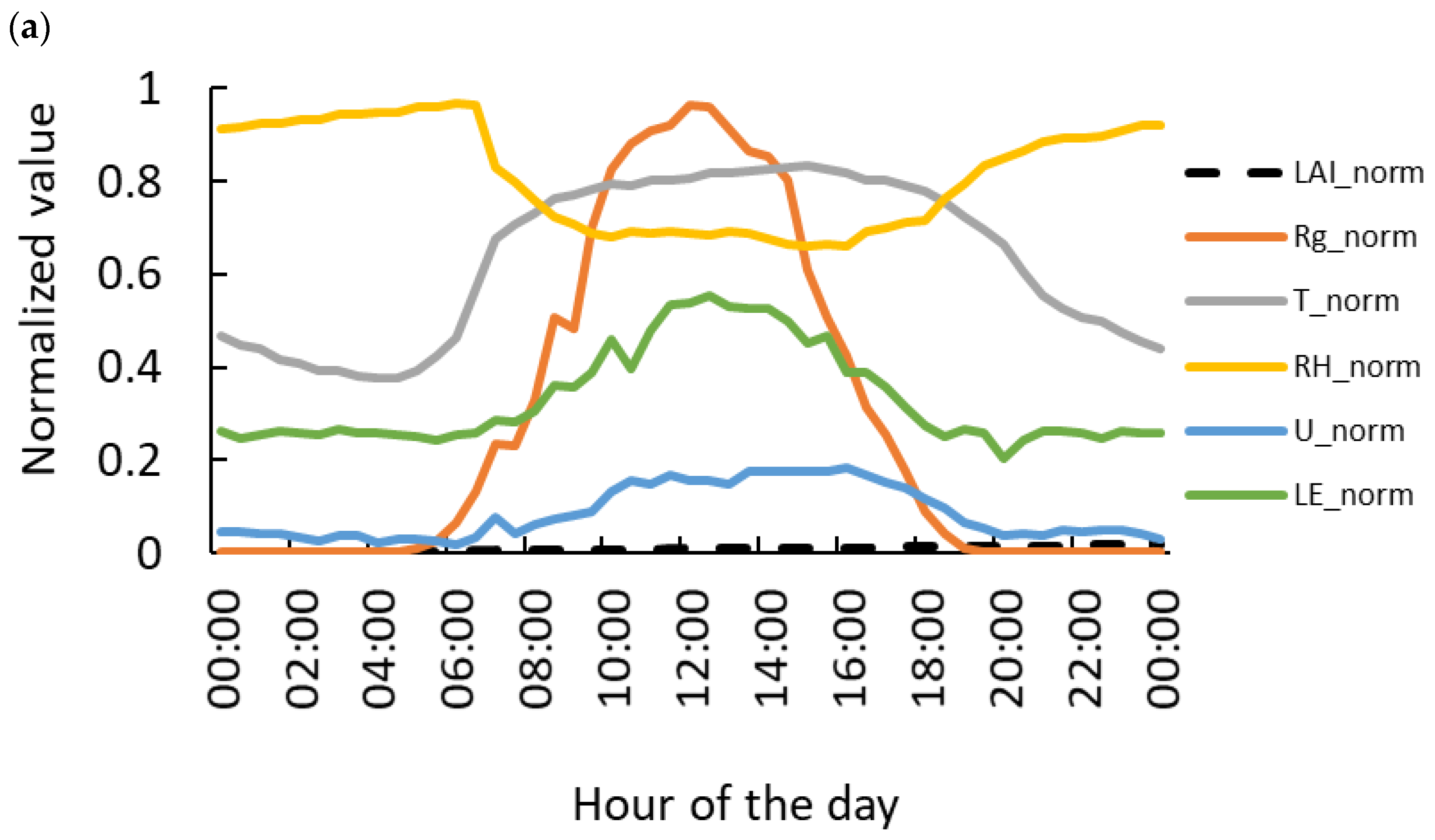
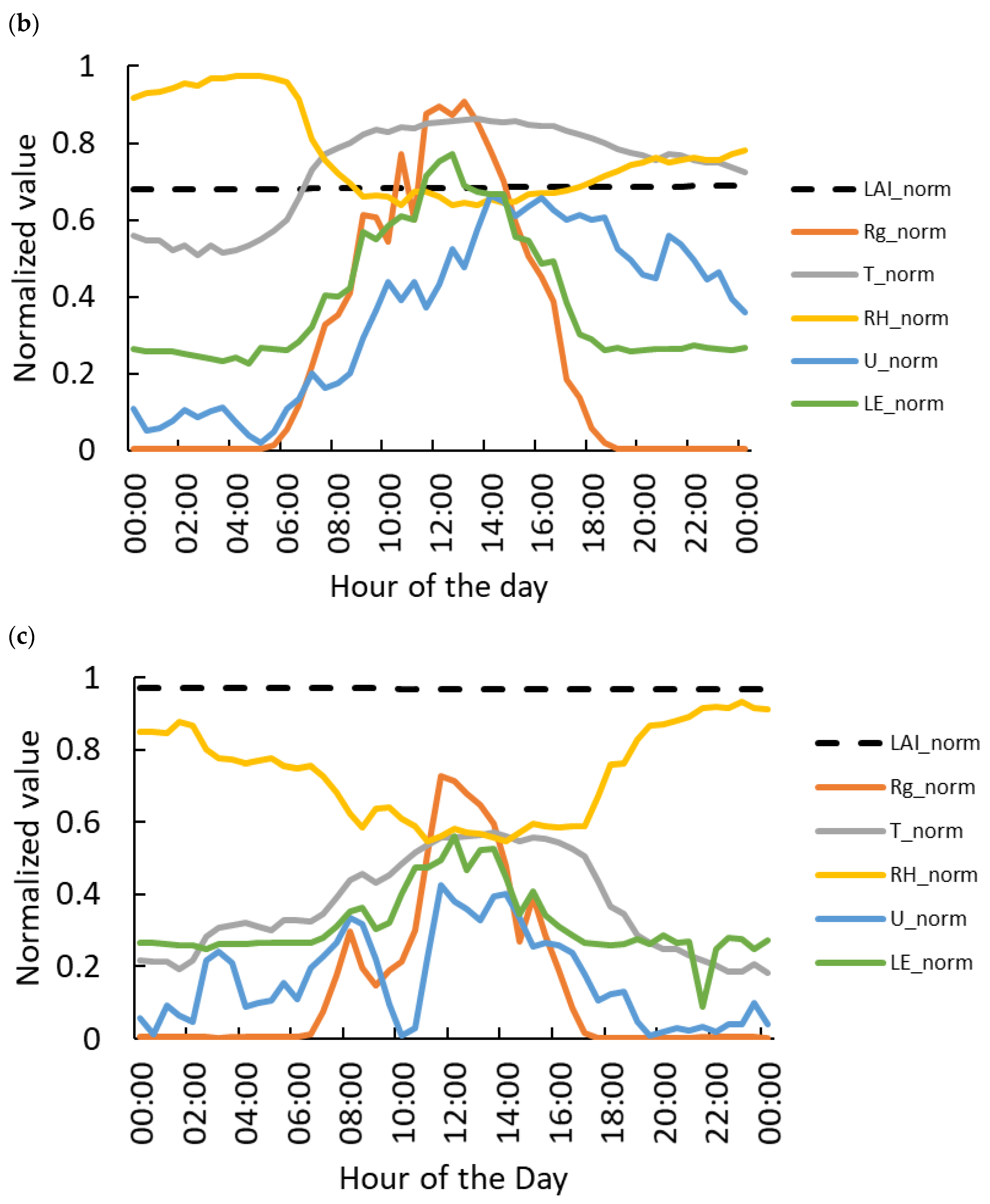
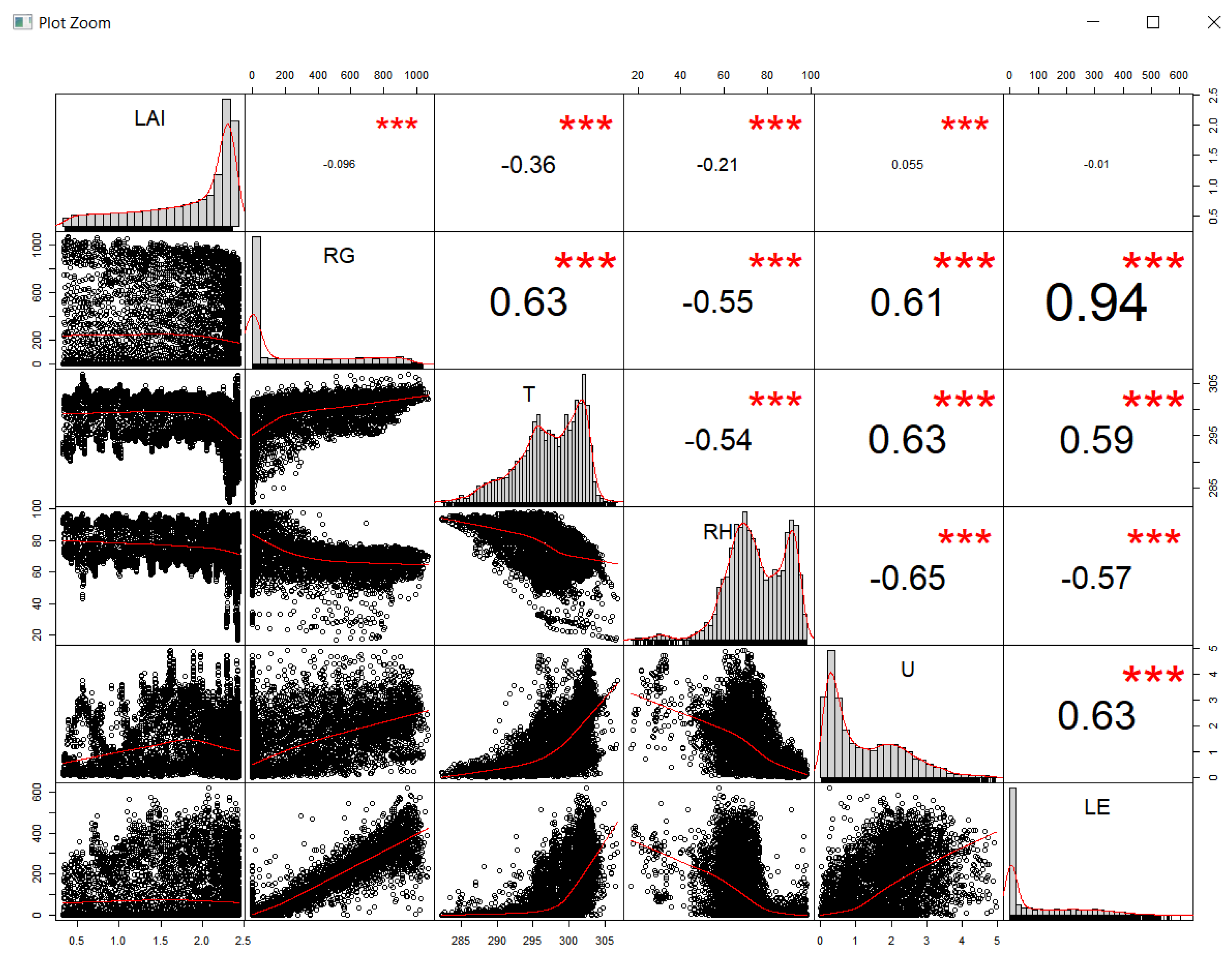
Analysis showed that the input variable most influential on evapotranspiration was solar radiation, then wind speed, air temperature, and air relative humidity. The strong influence of solar radiation on
LE in screenhouses is mainly due to the decoupled microclimate [
35] in this environment, as demonstrated by Möller et al. [
16] for a pepper screenhouse, by Haijun et al. [
17] for a banana screenhouse, and by Hadad et al. [
24] for pepper screenhouses and greenhouses. In such protected environments, the low wind speed enhances the contribution of radiation to evapotranspiration. This result is also in general agreement with Zanetti et al. [
4], who estimated reference evapotranspiration using ANN models under open field conditions, and showed that solar radiation and minimum/maximum air temperature data are sufficient to derive reliable estimates of ET
0.
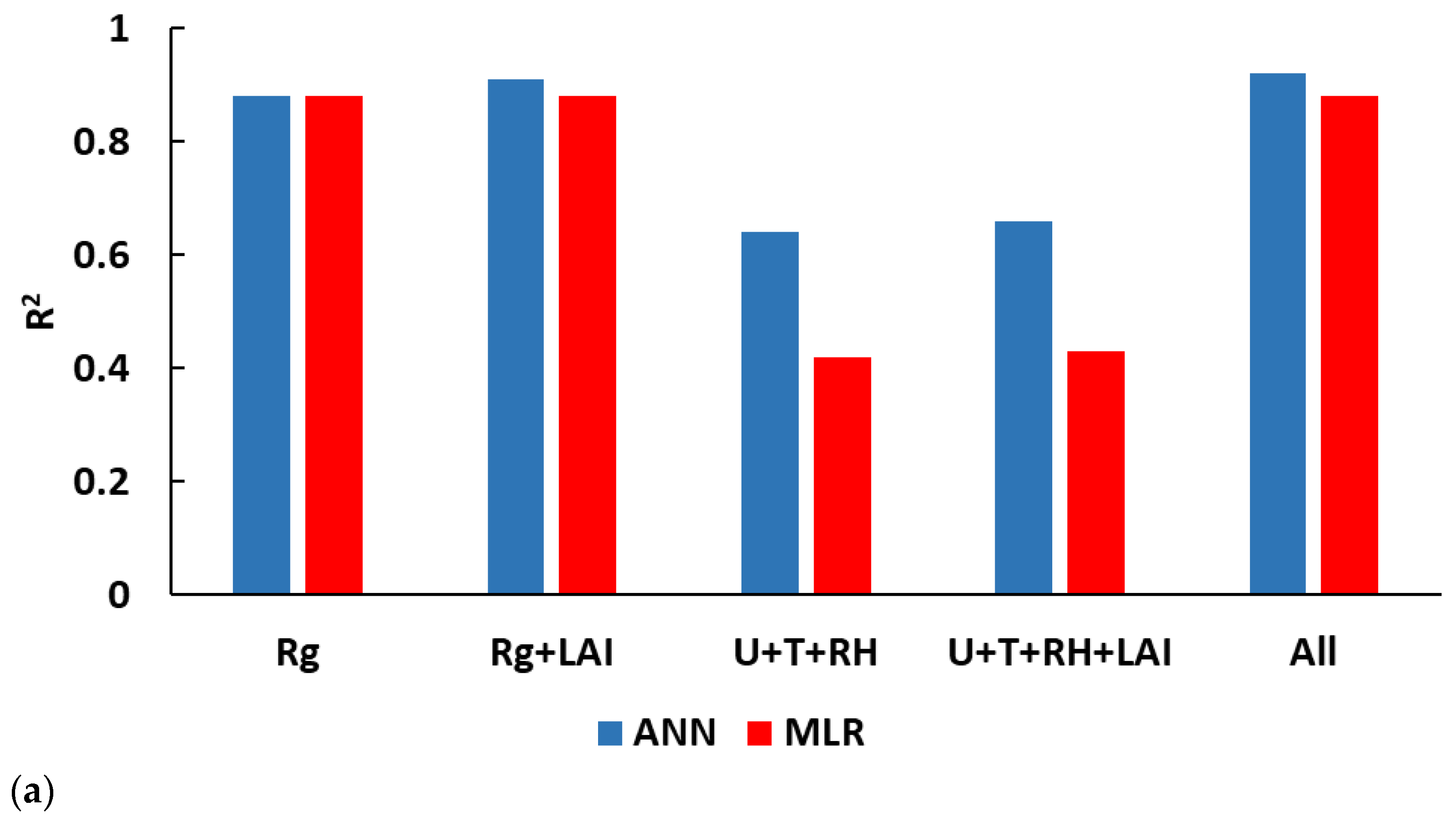
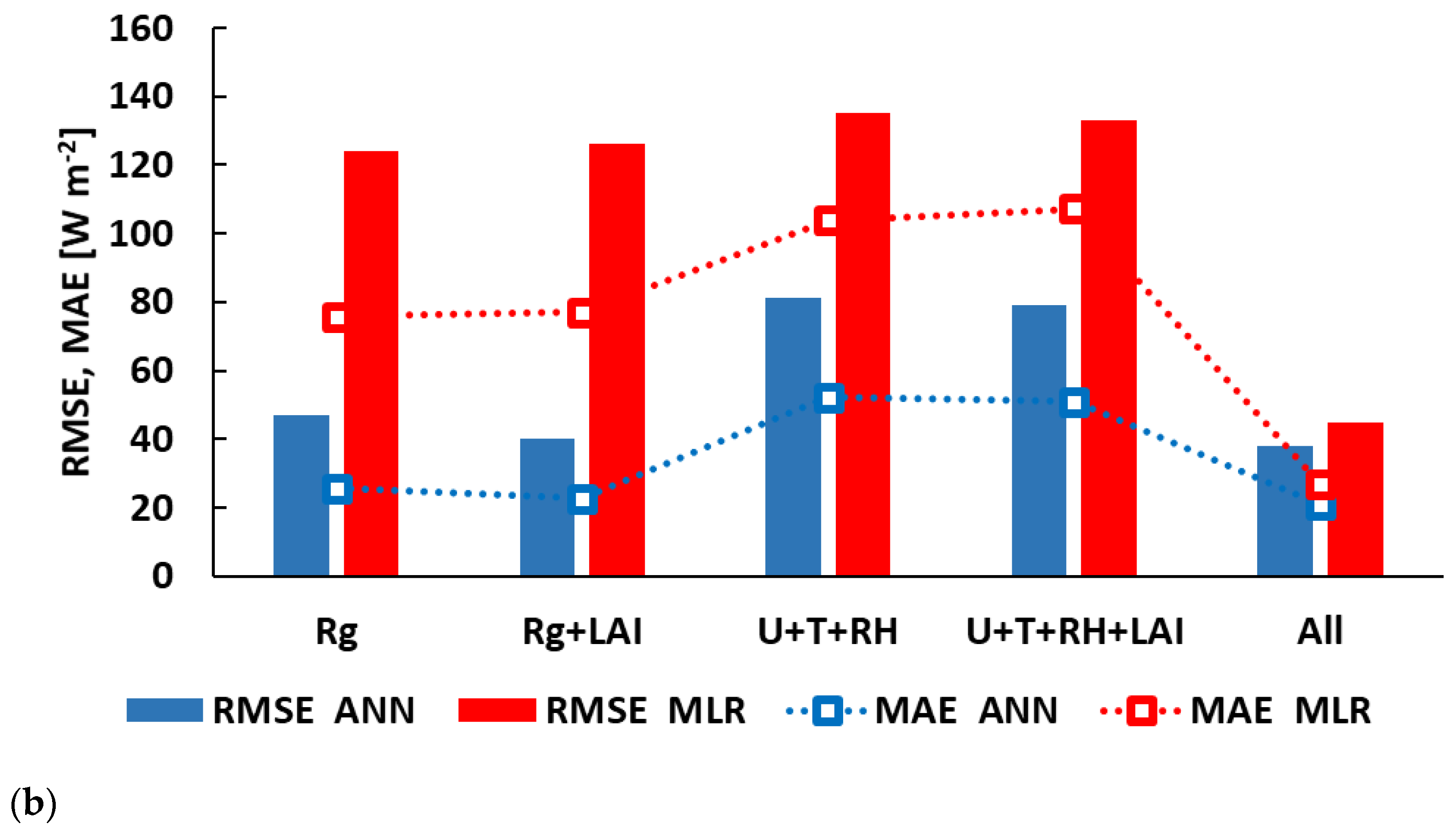
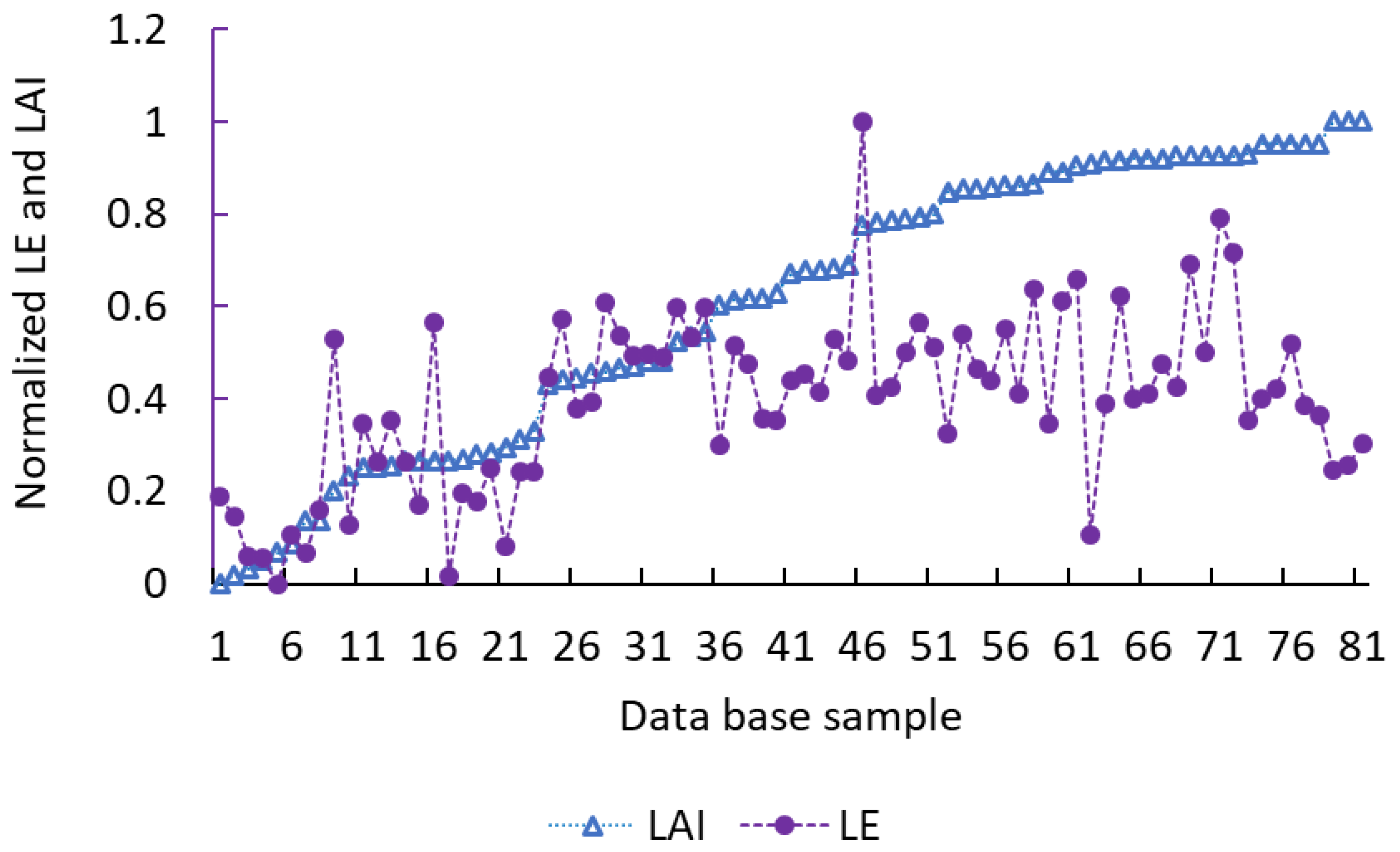
The influence of
LAI on
LE depended on the time scale of the analysis. When analysing the half-hourly values, the addition of
LAI only made a minute improvement on the models’ performance (
Figure 6a,b). The small contribution of
LAI to model performance was due to its low correlation with
LE on the half-hourly timescale (
Figure 5). However, when data were analysed on a daily timescale (
Section 3.6.3), the addition of
LAI to the input data set increased R
2 of the ANN and MLR models by 31% and 18%, respectively.
Comparing the performance of the ANN model with the commonly used Penman-Monteith model over the whole data of 2017 showed that the ANN is superior to PM. This result is in general agreement with the literature, where other versions of ANN were evaluated compared to the PM model. For example, Odhiambo et al. [
5] showed that a model which combined neural networks and fuzzy logic was in better agreement with measurements than PM-FAO56. Manikumari et al. [
6] used the deep learning neural network (DLNN) methodology to estimate ET
0 in a region of rice cultivation in India. Results of this study also showed superior performance of the DLNN model over the PM-FAO56. Zanetti et al. [
4] demonstrated the ability of the ANN model to estimate ET
0 with reasonable accuracy. These literature reports studied
LE or ET
0 in open fields, whereas our study investigated a screenhouse crop. The superiority of the different versions of the ANN model over PM, in both the open field and protected environments, is probably due to its high flexibility in describing the complex and non-linear interactions between meteorological variables and evapotranspiration. On the other hand, it should be noted that the ANN approach is totally empirical as compared to the PM model; the latter is based on physical principles, and thus may provide more insight into the mechanism of the evapotranspiration process.
Several issues that were not considered in this research require further study. The first, related to the data set, is sensor height relative to screenhouse height and its effect on the models. Although the measurement system was positioned at different heights during each campaign (
Table 1), all data were aggregated into a single database. It is possible that separately considering data from different heights would improve model performance. On the other hand, machine learning approaches require large amounts of data for reliable performance, and deriving a distinct model for each sensor height would cause the models to be based on small pieces of data. For this reason, in the present study, data from all sensor heights were collected into a single large data set.
Secondly, developing models using short training periods is essential from a practical point of view. Installing measurement systems such as those in the present study, including the eddy covariance system, is highly time-, cost-, and labor-consuming. The current analysis considered training periods as short as a month or a week. The results showed that training during specific seasons of the year was advantageous over other seasons. In a future study, collection of a more extensive data set would enable a more detailed analysis to better identify the optimal season for training with a short-term data set.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}