
A Three-Dimensional Fully-Coupled Fluid-Structure Model for Tsunami Loading on Coastal Bridges

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Flow Model
2.1. Governing Equations
2.2. Free-Surface Capturing Using the Weller-VOF Technique
2.3. Solution of Momentum Equations
2.4. Pressure-Velocity Coupling
2.5. Turbulence Closure
2.6. Boundary Conditions
2.7. Time Step Control
2.8. Flow Model Coding
3. Structure Motion Model
4. Incorporating Structure Motion into the Fluid Solver
4.1. Immersed Boundary Method with Cut-Cell Technique
4.2. Representation of Structure on the Fluid Mesh
4.3. Modification to Governing Equations
5. Validations of the 3D Flow Model
5.1. Impact Pressure on a Block Due to Dam-Break Flow
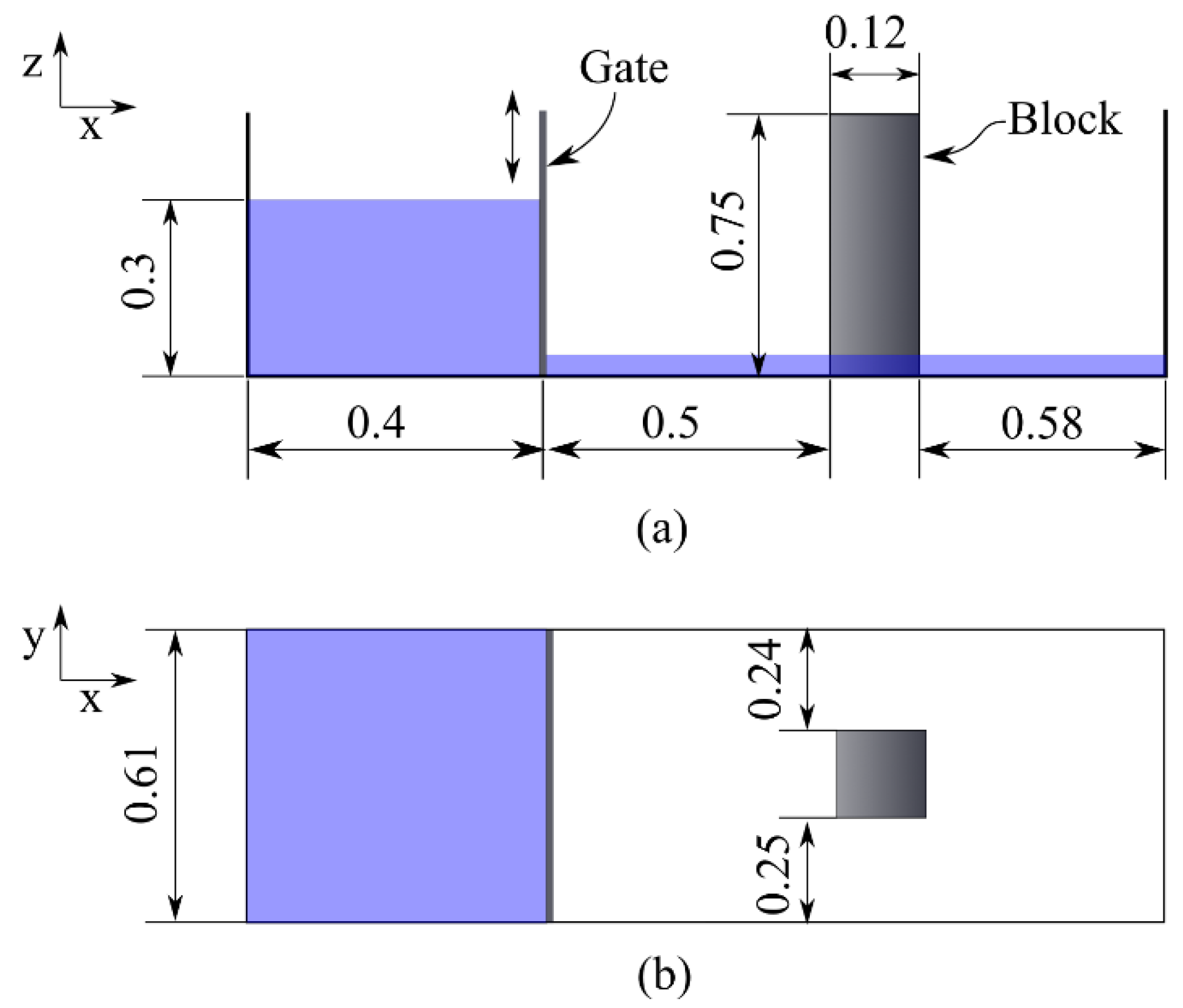
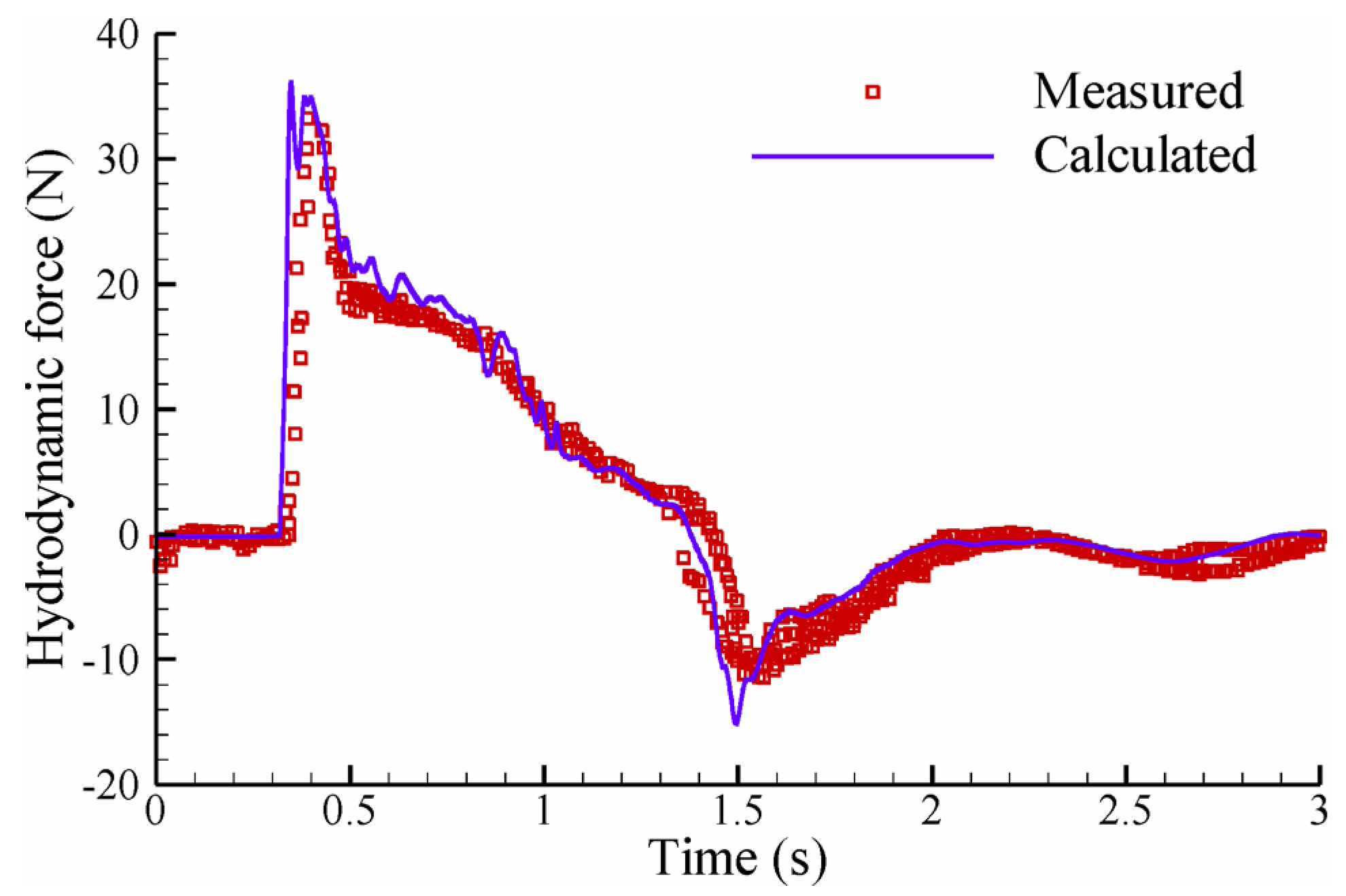
5.2. Impact Force on a Block Due to Dam-Break Flow
6. Validations of the Coupled Fluid-Structure Model
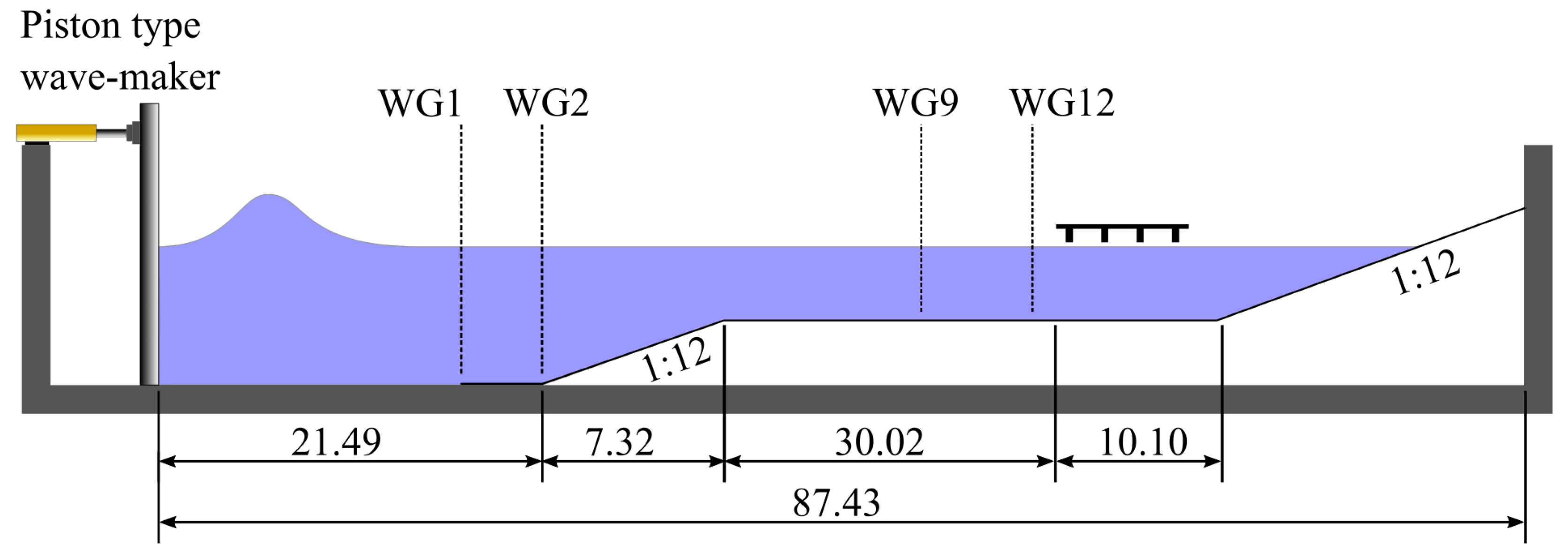
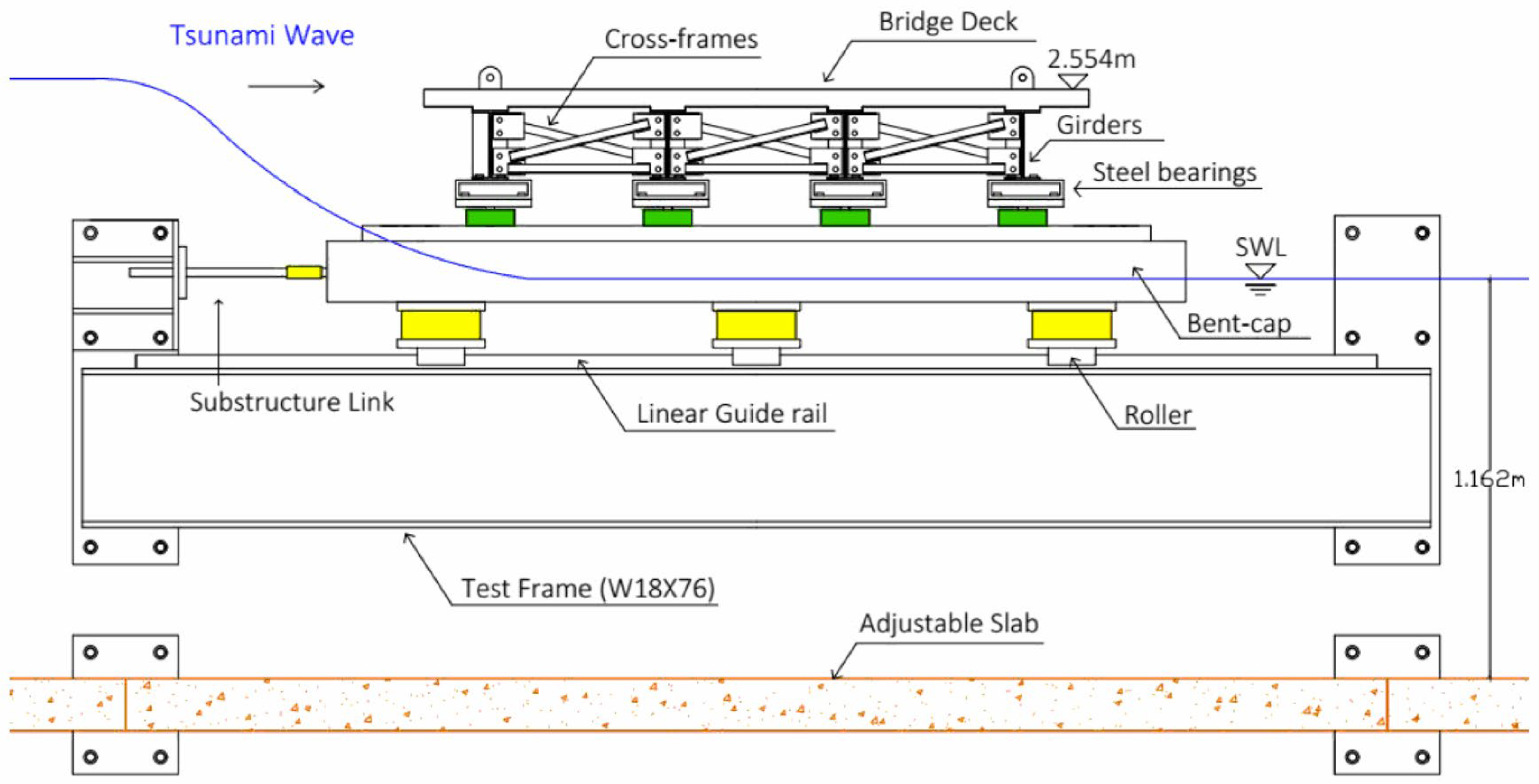
6.1. Experiment Setup
6.2. Numerical Flow Domain and Structure Model Setup
6.3. Comparison of Numerical Results and Experimental Data
7. Discussion
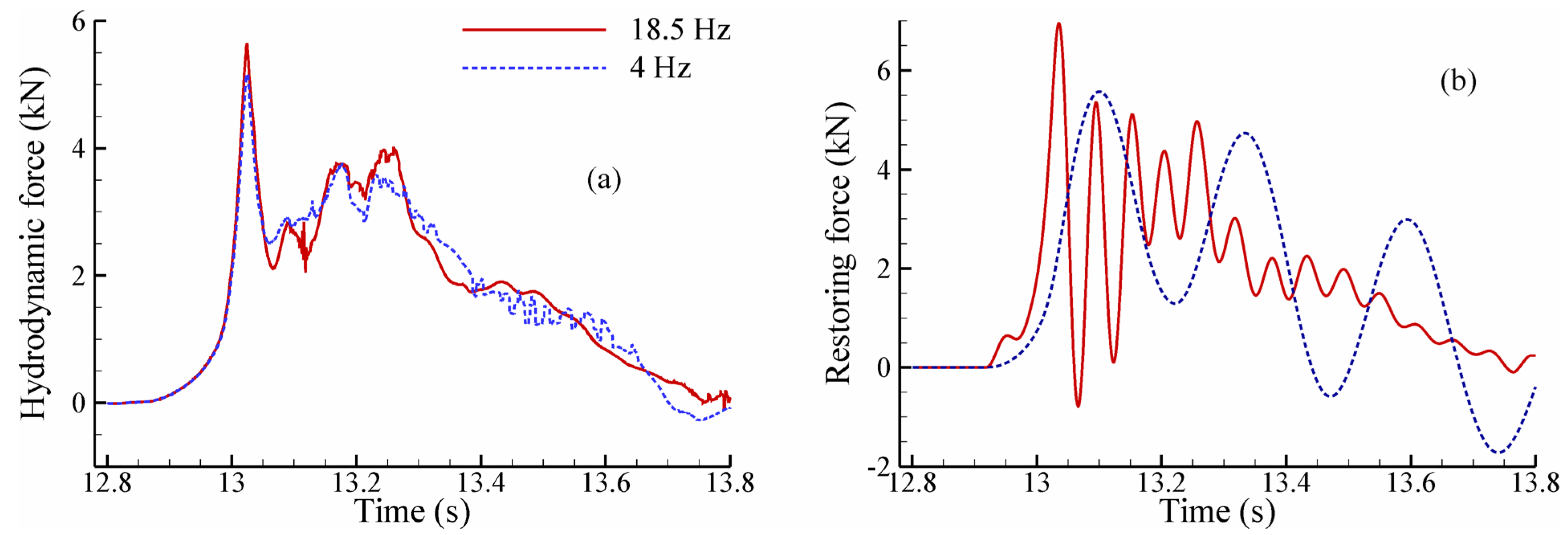
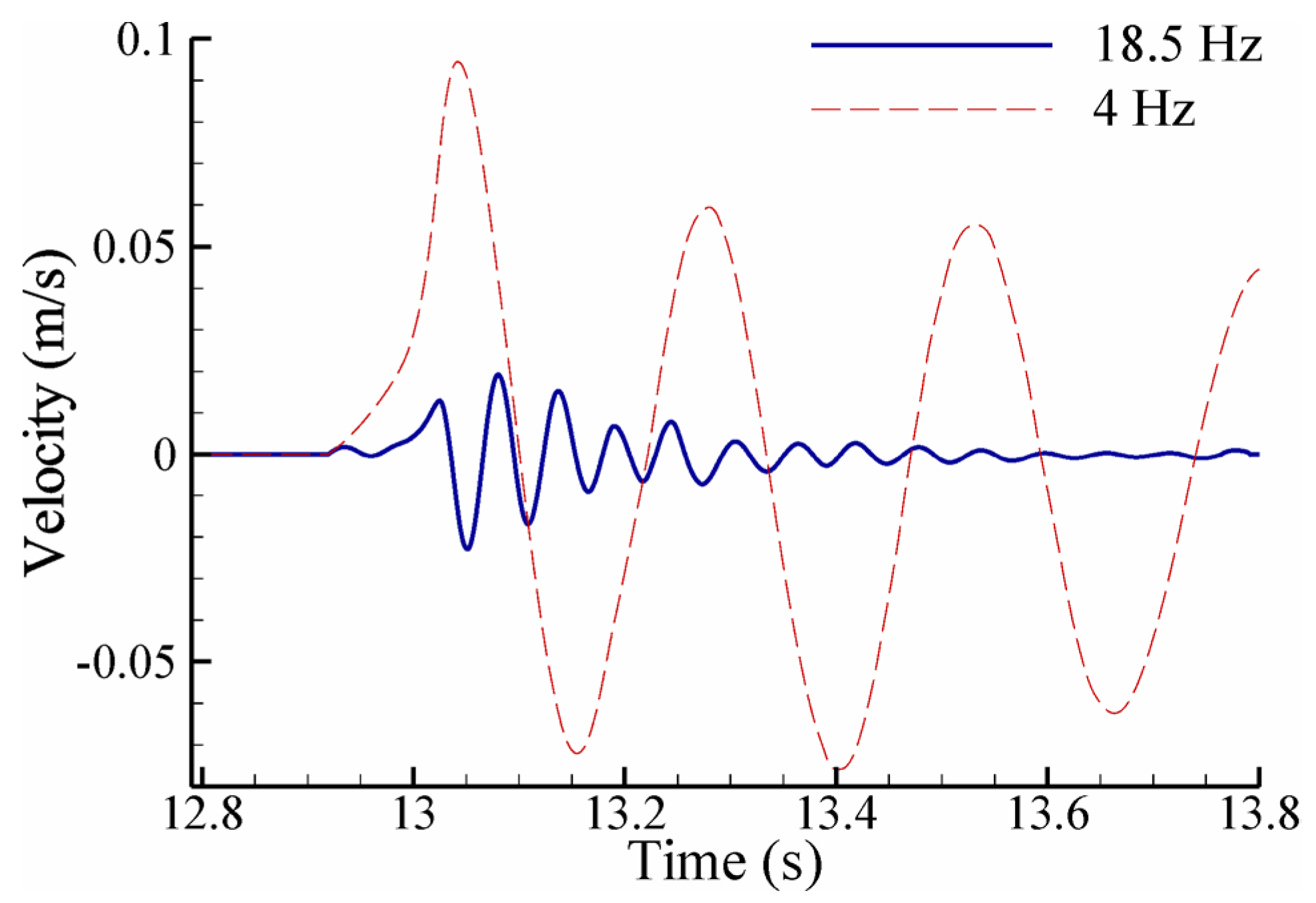
7.1. Comparison of Forces on Structures with Different Flexibilities
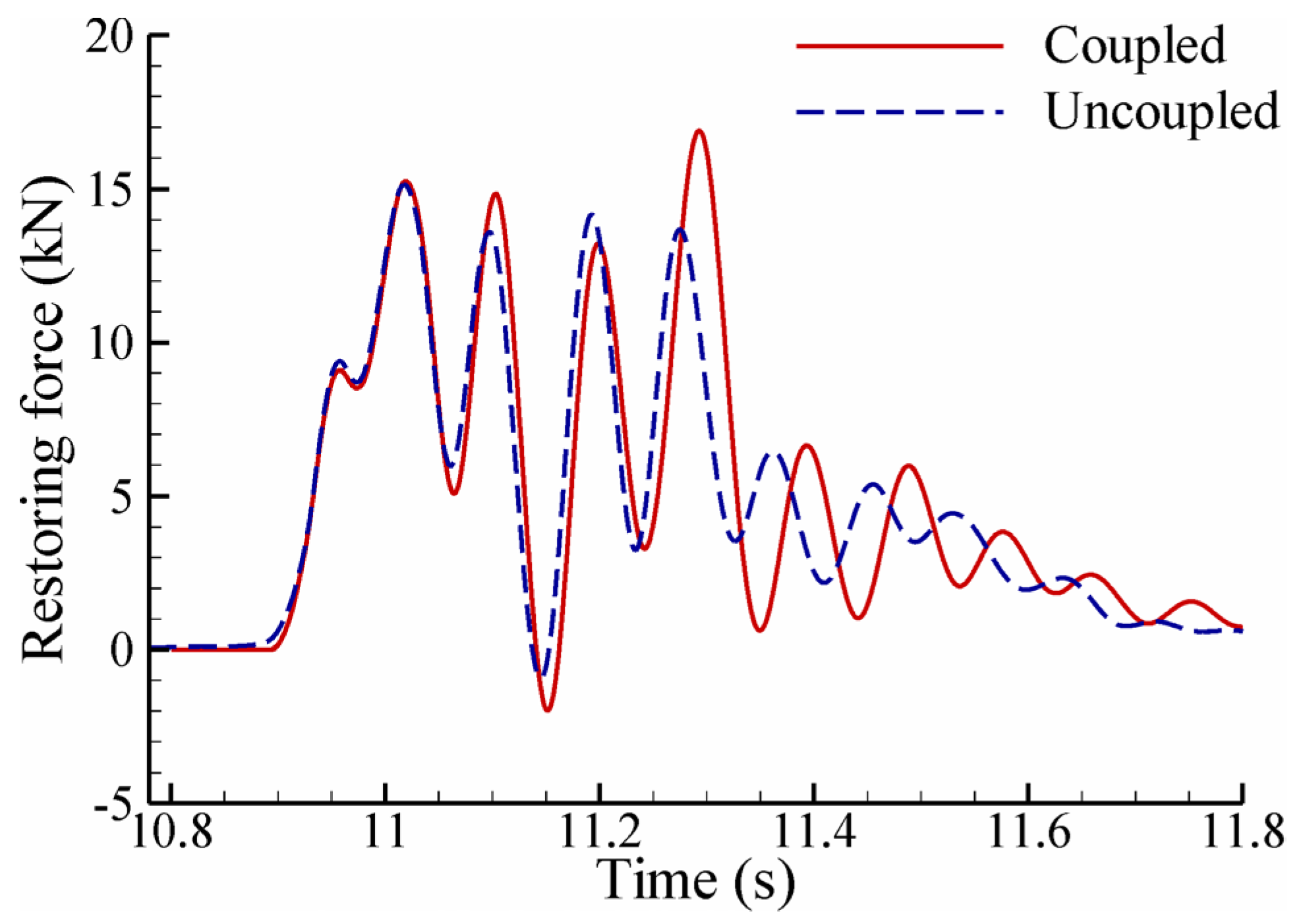
7.2. Comparison of Forces Calculated by Fully Coupled and Uncoupled Simulations
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abraham, A.O. Extreme Wave Impact on a Flexible Plate. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Al-Faesly, T.; Palermo, D.; Nistor, I.; Cornett, A. Experimental modeling of extreme hydrodynamic forces on structural models. Int. J. Prot. Struct. 2012, 3, 477–505. [Google Scholar] [CrossRef]
- Al-Faesly, T.Q. Extreme Hydrodynamic Loading on Near-Shore Structures. Ph.D. Thesis, University of Ottawa, ON, Canada, 2016. [Google Scholar]
- Arikawa, T. Structural behavior under impulsive tsunami loading. J. Disaster Res. 2009, 4, 377–381. [Google Scholar] [CrossRef]
- Arnason, H. Interactions between an Incident Bore and a Free-Standing Coastal Structure. Ph.D. Thesis, University of Washington, Seattle, WA, USA, 2005. [Google Scholar]
- Asadollahi, N.; Nistor, I.; Mohammadian, A. Numerical investigation of tsunami bore effects on structures, part I: Drag coefficients. Nat. Hazards 2019, 96, 285–309. [Google Scholar] [CrossRef]
- Asakura, R.; Iwase, K.; Ikeya, T.; Takao, M.; Kaneto, T.; Fujii, N.; Ohmori, M. The tsunami wave force acting on land structures. Coast. Eng. 2003, 2002, 1191–1202. [Google Scholar]
- Aureli, F.; Dazzi, S.; Maranzoni, A.; Mignosa, P.; Vacondio, R. Experimental and numerical evaluation of the force due to the impact of a dam-break wave on a structure. Adv. Water Resour. 2015, 76, 29–42. [Google Scholar] [CrossRef]
- Balaras, E. Modeling complex boundaries using an external force field on fixed Cartesian grids in large-eddy simulations. Comput. Fluids 2004, 33, 375–404. [Google Scholar] [CrossRef]
- Bao, Y.; Donev, A.; Griffith, B.E.; McQueen, D.M.; Peskin, C.S. An immersed boundary method with divergence-free velocity interpolation and force spreading. J. Computat. Phys. 2017, 347, 183–206. [Google Scholar] [CrossRef]
- Bathe, K.-J. Conserving energy and momentum in nonlinear dynamics: A simple implicit time integration scheme. Comput. Struct. 2007, 85, 437–445. [Google Scholar] [CrossRef]
- Berberović, E.; van Hinsberg, N.P.; Jakirlić, S.; Roisman, I.V.; Tropea, C. Drop impact onto a liquid layer of finite thickness: Dynamics of the cavity evolution. Phys. Rev. E 2009, 79, 036306. [Google Scholar] [CrossRef]
- Bernardini, M.; Modesti, D.; Pirozzoli, S. On the suitability of the immersed boundary method for the simulation of high-Reynolds-number separated turbulent flows. Comput. Fluids 2016, 130, 84–93. [Google Scholar] [CrossRef]
- Boris, J.P.; Book, D.L. Flux-corrected transport. I. SHASTA, a fluid transport algorithm that works. J. Computat. Phys. 1973, 11, 38–69. [Google Scholar] [CrossRef]
- Brackbill, J.U.; Kothe, D.B.; Zemach, C. A continuum method for modeling surface tension. J. Computat. Phys. 1992, 100, 335–354. [Google Scholar] [CrossRef]
- Bricker, J.D.; Nakayama, A. Contribution of Trapped air, deck superelevation, and nearby structures to bridge deck failure during a tsunami. J. Hydraul. Eng. 2014, 140, 05014002. [Google Scholar] [CrossRef]
- Cacace, S.; Cristiani, E.; Ferretti, R. Blended numerical schemes for the advection equation and conservation laws. ESAIM Math. Model. Numer. Anal. 2017, 51, 997–1019. [Google Scholar] [CrossRef]
- Cardiff, P.; Karač, A.; De Jaeger, P.; Jasak, H.; Nagy, J.; Ivanković, A.; Tuković, Ž. An open-source finite volume toolbox for solid mechanics and fluid-solid interaction simulations. arXiv 2018, arXiv:1808.10736. [Google Scholar]
- Chan, I.-C.; Liu, P.L.-F. On the runup of long waves on a plane beach. J. Geophys. Res. Ocean. 2012, 117, C08006. [Google Scholar] [CrossRef]
- Chanson, H. Tsunami surges on dry coastal plains: Application of dam break wave equations. Coast. Eng. J. 2006, 48, 355–370. [Google Scholar] [CrossRef]
- Chen, L.F.; Zang, J.; Hillis, A.J.; Morgan, G.C.J.; Plummer, A.R. Numerical investigation of wave–structure interaction using OpenFOAM. Ocean Eng. 2014, 88, 91–109. [Google Scholar] [CrossRef]
- Chung, J.; Hulbert, G.M. A time integration algorithm for structural dynamics with improved numerical dissipation: The generalized-α method. J. Appl. Mech. 1993, 60, 371–375. [Google Scholar] [CrossRef]
- Clarke, D.K.; Salas, M.D.; Hassan, H.A. Euler calculations for multielement airfoils using Cartesian grids. AIAA J. 1986, 24, 353–358. [Google Scholar] [CrossRef]
- Conde, J.M.P. Comparison of different methods for generation and absorption of water waves. Rev. Eng. Térmica 2019, 18, 71–77. [Google Scholar] [CrossRef]
- Damián, S.M. An Extended Mixture Model for the Simultaneous Treatment of Short and Long Scale Interfaces. Ph.D. Thesis, Universidad Nacional del Litoral, Santa Fe, Argentina, 2013. [Google Scholar]
- Deshpande, S.S.; Anumolu, L.; Trujillo, M.F. Evaluating the performance of the two-phase flow solver interFoam. Computat. Sci. Discov. 2012, 5, 014016. [Google Scholar] [CrossRef]
- Earthquake Engineering Research Institute. The Japan Tohoku Tsunami of March 11, 2011; EERI Special Earthquake Report; EERI: Oakland, CA, USA, 2011. [Google Scholar]
- Fritz, H.M.; Petroff, C.M.; Catalán, P.A.; Cienfuegos, R.; Winckler, P.; Kalligeris, N.; Weiss, R.; Barrientos, S.E.; Meneses, G.; Valderas-Bermejo, C.; et al. Field survey of the 27 February 2010 Chile tsunami. Pure Appl. Geophys. 2011, 168, 1989–2010. [Google Scholar] [CrossRef]
- Forouzan, B.; Baragamage, D.S.A.; Shaloudegi, K.; Nakata, N.; Wu, W. Hybrid simulation of a structure to tsunami loading. Adv. Struct. Eng. 2019, 23, 136943321985784. [Google Scholar] [CrossRef]
- Gingold, R.A.; Monaghan, J.J. Smoothed particle hydrodynamics: Theory and application to non-spherical stars. Mon. Not. R. Astron. Soc. 1977, 181, 375–389. [Google Scholar] [CrossRef]
- Gopala, V.R.; van Wachem, B.G.M. Volume of fluid methods for immiscible-fluid and free-surface flows. Chem. Eng. J. 2008, 141, 204–221. [Google Scholar] [CrossRef]
- Gómez-Gesteira, M.; Dalrymple, R.A. Using a three-dimensional smoothed particle hydrodynamics method for wave impact on a tall structure. J. Waterw. Port Coast. Ocean Eng. 2004, 130, 63–69. [Google Scholar] [CrossRef]
- Hayatdavoodi, M.; Seiffert, B.; Ertekin, R.C. Experiments and computations of solitary-wave forces on a coastal-bridge deck. Part II: Deck with girders. Coast. Eng. 2014, 88, 210–228. [Google Scholar] [CrossRef]
- Hirt, C.W.; Amsden, A.A.; Cook, J.L. An arbitrary Lagrangian-Eulerian computing method for all flow speeds. J. Computat. Phys. 1974, 14, 227–253. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Computat. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Hou, G.; Wang, J.; Layton, A. Numerical methods for fluid-structure interaction—A review. Commun. Comput. Phys. 2012, 12, 337–377. [Google Scholar] [CrossRef]
- Huang, L.; Li, Y.; Benites-Munoz, D.; Windt, C.W.; Feichtner, A.; Tavakoli, S.; Davidson, J.; Paredes, R.; Quintuna, T.; Ransley, E.; et al. A review on the modelling of wave-structure interactions based on OpenFOAM. OpenFOAM® J. 2022, 2, 116–142. [Google Scholar] [CrossRef]
- Huang, W.-X.; Tian, F.-B. Recent trends and progress in the immersed boundary method. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7617–7636. [Google Scholar] [CrossRef]
- InterFoam—OpenFOAMWiki. 2018. Available online: https://openfoamwiki.net/index.php/InterFoam (accessed on 15 August 2019).
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Computat. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Istrati, D. Large-Scale Experiments of Tsunami Inundation of Bridges including Fluid-Structure-Interaction. Ph.D. Thesis, University of Nevada, Reno, NV, USA, 2017. [Google Scholar]
- Istrati, D.; Buckle, I.G. Effect of fluid-structure interaction on connection forces in bridges due to tsunami loads. In Proceedings of the 30th U.S.-Japan Bridge Engineering Workshop, Washington, DC, USA, 21–23 October 2014. [Google Scholar]
- Istrati, D.; Buckle, I.; Lomonaco, P.; Yim, S. Deciphering the tsunami wave impact and associated connection forces in open-girder coastal bridges. J. Mar. Sci. Eng. 2018, 6, 148. [Google Scholar] [CrossRef]
- Jasak, H. Error Analysis and Estimation for Finite Volume Method with Applications to Fluid Flow. Ph.D. Thesis, University of London, London, UK, 1996. [Google Scholar]
- Jasak, H.; Weller, H.G. Interface-Tracking Capabilities of the Intergamma Differencing Scheme; Technical Report; Imperial College, University of London: London, UK, 1995. [Google Scholar]
- Kajishima, T.; Taira, K. Immersed boundary methods. In Computational Fluid Dynamics; Springer: Cham, Switzerland, 2017; pp. 179–205. [Google Scholar]
- Kim, W.; Choi, H. Immersed boundary methods for fluid-structure interaction: A review. Int. J. Heat Fluid Flow 2019, 75, 301–309. [Google Scholar] [CrossRef]
- Kleefsman, K.M.T.; Fekken, G.; Veldman, A.E.P.; Iwanowski, B.; Buchner, B. A volume-of-fluid based simulation method for wave impact problems. J. Computat. Phys. 2005, 206, 363–393. [Google Scholar] [CrossRef]
- Kundu, P.K.; Cohen, I.M.; Dowling, D.R. Fluid Mechanics, 5th ed.; Academic Press: Cambridge, MA, USA, 2012; p. 891. [Google Scholar]
- Marsooli, R.; Wu, W. Three-dimensional finite-volume model of dam-break flows with sediment transport over movable beds. J. Hydraul. Eng. 2015, 141, 04014066. [Google Scholar] [CrossRef]
- McGranahan, G.; Balk, D.; Anderson, B. The rising tide: Assessing the risks of climate change and human settlements in low elevation coastal zones. Environ. Urban. 2007, 19, 17–37. [Google Scholar] [CrossRef]
- Miquel, A.; Kamath, A.; Alagan Chella, M.; Archetti, R.; Bihs, H. Analysis of different methods for wave generation and absorption in a CFD-based numerical wave tank. J. Mar. Sci. Eng. 2018, 6, 73. [Google Scholar] [CrossRef]
- Mittal, R.; Dong, H.; Bozkurttas, M.; Najjar, F.M.; Vargas, A.; von Loebbecke, A. A versatile sharp interface immersed boundary method for incompressible flows with complex boundaries. J. Computat. Phys. 2008, 227, 4825–4852. [Google Scholar]
- Mittal, R.; Iaccarino, G. Immersed boundary methods. Annu. Rev. Fluid Mech. 2005, 37, 239–261. [Google Scholar] [CrossRef]
- Miyanawala, T.P.; Jaiman, R.K. A hybrid data-driven deep learning technique for fluid-structure interaction. In Proceedings of the 38th International Conference on Ocean, Offshore & Arctic Engineering, Glasgow, UK, 9–14 June 2019. [Google Scholar]
- Monaghan, J.J. Simulating Free Surface Flows with SPH. J. Computat. Phys. 1994, 110, 399–406. [Google Scholar] [CrossRef]
- Morgan, G.C.J.; Zang, J.; Greaves, D.; Heath, A.; Whitlow, C.; Young, J. Using the rasInterFoam CFD model for wave transformation and coastal modelling. Coast. Eng. Proc. 2011, 1, 23. [Google Scholar] [CrossRef]
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Noh, G.; Bathe, K.-J. For direct time integrations: A comparison of the Newmark and ρ∞-Bathe schemes. Comput. Struct. 2019, 225, 106079. [Google Scholar] [CrossRef]
- Oshnack, M.E.; Aguíñiga, F.; Cox, D.; Gupta, R.; van de Lindt, J. Effectiveness of small onshore seawall in reducing forces induced by tsunami bore: Large scale experimental study. J. Disaster Res. 2009, 4, 382–390. [Google Scholar] [CrossRef]
- Patankar, S.V. Numerical Heat Transfer and Fluid Flow; Hemisphere: New York, NY, USA, 1980. [Google Scholar]
- Peskin, C.S. Numerical analysis of blood flow in the heart. J. Computat. Phys. 1977, 25, 220–252. [Google Scholar] [CrossRef]
- Rhie, C.M.; Chow, W.L. Numerical study of the turbulent flow past an airfoil with trailing edge separation. AIAA J. 1983, 21, 1525–1532. [Google Scholar] [CrossRef]
- RMS. Managing Tsunami Risk in the Aftermath of the 2004 Indian Ocean Earthquake & Tsunami; Risk Management Solutions, Inc: Newark, CA, USA, 2006. [Google Scholar]
- Rusche, H. Computational Fluid Dynamics of dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College London, University of London, London, UK, 2002. [Google Scholar]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef]
- Sarjamee, S.; Nistor, I.; Mohammadian, A. Large eddy simulation of extreme hydrodynamic forces on structures with mitigation walls using OpenFOAM. Nat. Hazards 2017, 85, 1689–1707. [Google Scholar] [CrossRef]
- Seo, J.H.; Mittal, R. A sharp-interface immersed boundary method with improved mass conservation and reduced spurious pressure oscillations. J. Computat. Phys. 2011, 230, 7347–7363. [Google Scholar] [CrossRef] [PubMed]
- Smagorinsky, J. General circulation experiments with the primitive equations: I. The basic experiment. Mon. Weather Rev. 1963, 91, 99–164. [Google Scholar] [CrossRef]
- Soni, T.; Sharma, A.; Dutta, R.; Dutta, A.; Jayavelu, S.; Sarkar, S. Capturing functional relations in fluid–structure interaction via machine learning. R. Soc. Open Sci. 2022, 9, 220097. [Google Scholar] [CrossRef] [PubMed]
- Sorensen, R.M. Basic Coastal Engineering; Springer: New York, NY, USA, 2006. [Google Scholar]
- St-Germain, P. Numerical Modeling of Tsunami-Induced Hydrodynamic Forces on Free-Standing Structures Using the SPH Method. Ph.D. Thesis, University of Ottawa, Ottawa, ON, Canada, 2012. [Google Scholar]
- St-Germain, P.; Nistor, I.; Townsend, R. Numerical modeling of the impact with structures of tsunami bores propagating on dry and wet beds using the SPH method. Int. J. Prot. Struct. 2012, 3, 221–255. [Google Scholar] [CrossRef]
- Tromans, P.S.; Anaturk, A.R.; Hagemeijer, P. A new model for the kinematics of large ocean waves-application as a design wave. In Proceedings of the First International Offshore and Polar Engineering Conference, Edinburgh, UK, 11–16 August 1991. [Google Scholar]
- Tukovic, Z.; Karač, A.; Cardiff, P.; Jasak, H.; Ivankovic, A. OpenFOAM finite volume solver for fluid-solid interaction. Trans. Famena 2018, 42, 1–31. [Google Scholar] [CrossRef]
- Udaykumar, H.S.; Mittal, R.; Rampunggoon, P. Interface tracking finite volume method for complex solid-fluid interactions on fixed meshes. Comm. Numer. Methods Eng. 2001, 18, 89–97. [Google Scholar] [CrossRef]
- Udaykumar, H.S.; Mittal, R.; Rampunggoon, P.; Khanna, A. A sharp interface cartesian grid method for simulating flows with complex moving boundaries. J. Computat. Phys. 2001, 174, 345–380. [Google Scholar] [CrossRef]
- Udaykumar, H.S.; Shyy, W.; Rao, M.M. ELAFINT: A mixed Eulerian–Lagrangian method for fluid flows with complex and moving boundaries. Int. J. Numer. Methods Fluids 1996, 22, 691–712. [Google Scholar] [CrossRef]
- van Leer, B. Towards the ultimate conservative difference scheme. V. A second-order sequel to Godunov’s method. J. Computat. Phys. 1979, 32, 101–136. [Google Scholar] [CrossRef]
- Versteeg, H.K.; Malalasekera, W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method; Pearson Education Limited: London, UK, 2007; p. 503. [Google Scholar]
- Wei, Z.; Dalrymple, R.A. Numerical study on mitigating tsunami force on bridges by an SPH model. J. Ocean Eng. Mar. Energy 2016, 2, 365–380. [Google Scholar] [CrossRef]
- Wei, Z.; Dalrymple, R.A.; Hérault, A.; Bilotta, G.; Rustico, E.; Yeh, H. SPH modeling of dynamic impact of tsunami bore on bridge piers. Coast. Eng. 2015, 104, 26–42. [Google Scholar] [CrossRef]
- Windt, C.; Davidson, J.; Schmitt, P.; Ringwood, J. On the assessment of numerical wave makers in CFD simulations. J. Mar. Sci. Eng. 2019, 7, 47. [Google Scholar] [CrossRef]
- Wu, W. Computational River Dynamics; Taylor & Francis: Abingdon, UK, 2007; p. 494. [Google Scholar]
- Xiang, T.; Istrati, D.; Yim, S.C.; Buckle, I.G.; Lomonaco, P. Tsunami loads on a representative coastal bridge deck: Experimental study and validation of design equations. J. Waterw. Port Coast. Ocean. Eng. 2020, 146, 04020022. [Google Scholar] [CrossRef]
- Xiao, F.; Ii, S.; Chen, C. Revisit to the THINC scheme: A simple algebraic VOF algorithm. J. Computat. Phys. 2011, 230, 7086–7092. [Google Scholar] [CrossRef]
- Yang, J.; Balaras, E. An embedded-boundary formulation for large-eddy simulation of turbulent flows interacting with moving boundaries. J. Computat. Phys. 2006, 215, 12–40. [Google Scholar] [CrossRef]
- Ye, T.; Mittal, R.; Udaykumar, H.S.; Shyy, W. An accurate Cartesian grid method for viscous incompressible flows with complex immersed boundaries. J. Computat. Phys. 1999, 156, 209–240. [Google Scholar] [CrossRef]
- Yeh, H. Design tsunami forces for onshore structures. J. Disaster Res. 2007, 2, 531–536. [Google Scholar] [CrossRef]
- Zalesak, S.T. Fully multidimensional flux-corrected transport algorithms for fluids. J. Computat. Phys. 1979, 31, 335–362. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baragamage, D.S.P.A.; Wu, W. A Three-Dimensional Fully-Coupled Fluid-Structure Model for Tsunami Loading on Coastal Bridges. Water 2024, 16, 189. https://doi.org/10.3390/w16010189
Baragamage DSPA, Wu W. A Three-Dimensional Fully-Coupled Fluid-Structure Model for Tsunami Loading on Coastal Bridges. Water. 2024; 16(1):189. https://doi.org/10.3390/w16010189
Chicago/Turabian StyleBaragamage, Dilshan S. P. Amarasinghe, and Weiming Wu. 2024. "A Three-Dimensional Fully-Coupled Fluid-Structure Model for Tsunami Loading on Coastal Bridges" Water 16, no. 1: 189. https://doi.org/10.3390/w16010189
APA StyleBaragamage, D. S. P. A., & Wu, W. (2024). A Three-Dimensional Fully-Coupled Fluid-Structure Model for Tsunami Loading on Coastal Bridges. Water, 16(1), 189. https://doi.org/10.3390/w16010189