
Optimization Design of the Elbow Inlet Channel of a Pipeline Pump Based on the SCSO-BP Neural Network


Abstract
:1. Introduction
2. Pipeline Pump Model and Numerical Calculation
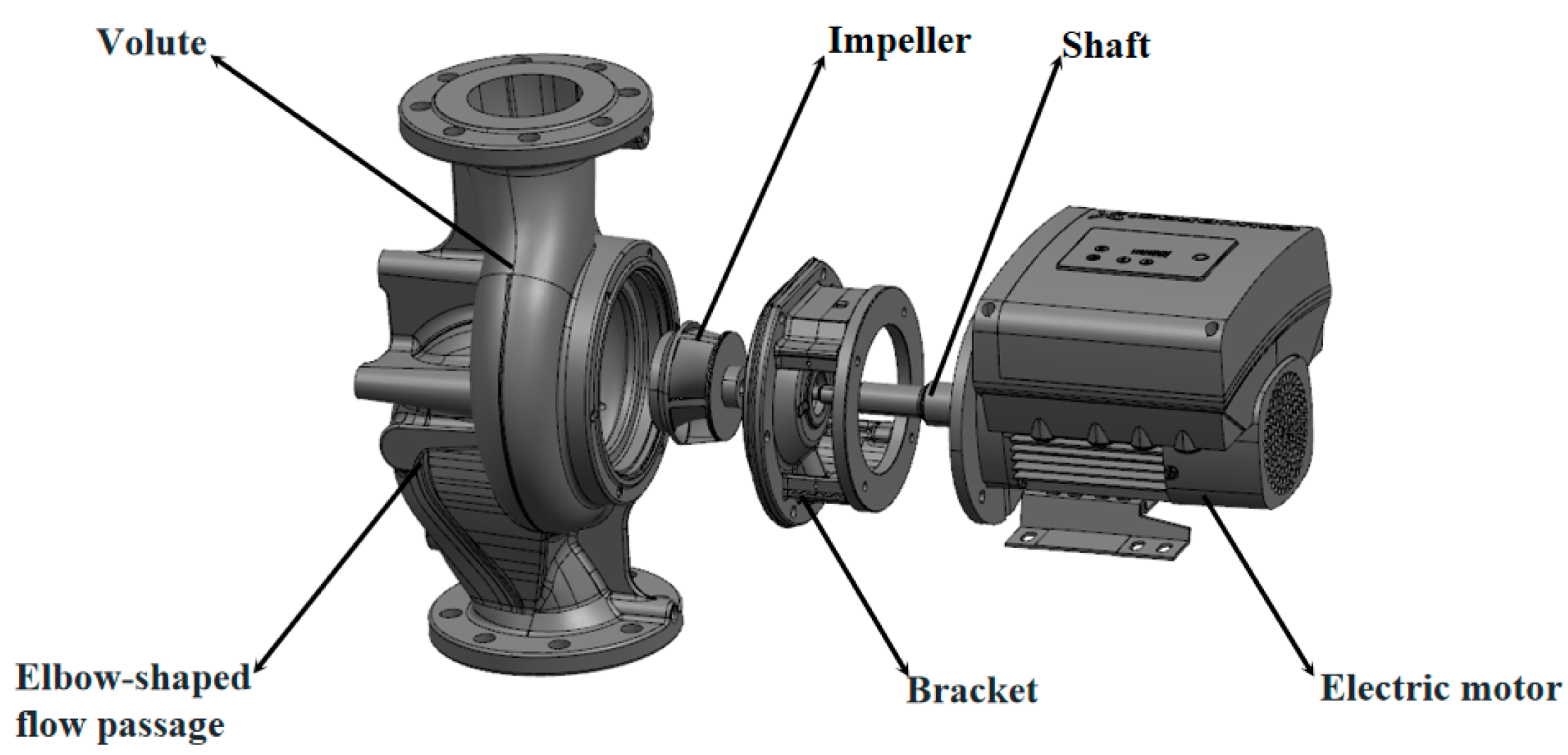
2.1. Visual Pump Model
2.2. Grid Division
2.3. Turbulence Model and Boundary Condition Settings
3. Optimization Process
3.1. Elbow Inlet Channel Parameterization Method
3.2. Screening of Significant Variables
3.3. Approximate Model Establishment (BP Neural Network Improved Based on the Sand Cat Swarm Algorithm)
3.3.1. Sand Cat Swarm Algorithm
- (1)
- Search for prey (exploration)
- (2)
- Attack prey (exploitation)
- (3)
- Search and attack
3.3.2. BP Neural Network
- (1)
- In the process of signal forward transmission, assuming that the value of is input on the node of the hidden layer, its expression can be shown like this:
- (2)
- Error Backpropagation Process
3.3.3. Construction of the SCSO-BP Neural Network
4. Results and Discussion
4.1. Test Verification
4.2. The Predictive Results and Comparative Analysis
4.3. Comparison of Flow Patterns in the Inlet
4.4. Performance Curve Comparison
5. Conclusions
- A SCSO-BP neural network has a better fit for network training, showing higher predictive accuracy in the improved BP neural network structure. The error fluctuations within the sample space were more stable, with a narrower range of fluctuations. The method presented in this paper can serve as a reference for multi-parameter optimization.
- The improved elbow inlet channel may operate in a wider range of high efficiency, and it has the greatest effect on the pump performance close to the design point.
- At points close to the design flow rate, the optimized model’s efficiency and head are greatly improved; under the design conditions, the efficiency increased by 5.13% and the head increased by 7.48%.
- The model’s profile on the bend pipe’s curvature transition is smoother, the low-speed area outside the appearance is smaller, the flow velocity distribution into the impeller is more uniform, and the secondary flow at the exit section’s edge is smaller after optimization, all of which improve the impeller’s fluid state. The elbow inlet channel fitting using spline curves is suggested as a source of inspiration for computer-aided parametric modeling. An efficient reference for multi-factor optimization and efficient design is provided by the suggested approach of collaborative optimization of the inlet flow channel, which is based on the SCSO-BP neural network and DOE experimental design.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stephen, C.; Yuan, S.; Pei, J.; Cheng, G.X. Numerical Flow Prediction in Inlet Pipe of Vertical Inline Pump. ASME J. Fluids Eng. 2018, 140, 051201. [Google Scholar] [CrossRef]
- Shi, W.; Li, Y.J.; Deng, D.S. Optimization design and numerical calculation of Elbow inlet channel. J. Fluid Mach. 2009, 37, 19–22. [Google Scholar]
- Zhang, C.; Li, Y.J.; Jiang, H.Y. Simulation and experiment on Hydraulic Optimization of Elbow inlet channel. J. Drain. Irrig. Mach. Eng. 2016, 34, 860–866. [Google Scholar]
- Semenova, A.V.; Chirkov, D.V.; Skorospelov, A.V.; Ustimenko, A.S.; Turuk, A.P.; Rigin, E.V.; Germanova, A.I. Optimization design of the elbow draft tube of the hydraulic turbine. IOP Conf. Ser. Earth Environ. Sci. 2022, 1079, 012028. [Google Scholar] [CrossRef]
- Stanley, K.O.; Clune, J.; Lehman, J.; Miikkulainen, R. Designing neural networks through neuroevolution. Nat. Mach. Intell. 2019, 1, 24–35. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, C.; Zuo, C. Coal mine safety production forewarning based on improved BP neural network. Int. J. Min. Sci. Technol. 2015, 25, 319–324. [Google Scholar] [CrossRef]
- Chen, M.J. An Improved BP Neural Network Algorithm and its Application. Appl. Mech. Mater. 2014, 543–547, 2120–2123. [Google Scholar] [CrossRef]
- Guo, Y.; Li, G.; Chen, H.; Wang, J.; Guo, M.; Sun, S.; Hu, W. Optimized neural network-based fault diagnosis strategy for VRF system in heating mode using data mining. Appl. Therm. Eng. 2017, 125, 1402–1413. [Google Scholar] [CrossRef]
- Gan, L.; Wang, Y.; Wang, B. Application of BP neural network in fault diagnosis of electric submersible pump Wells. Oil Drill. Prod. Technol. 2011, 33, 124–127. [Google Scholar]
- Seyyedabbasi, A.; Kiani, F. Sand Cat swarm optimization: A nature-inspired algorithm to solve global optimization problem. Eng. Comput. 2022, 39, 2627–2651. [Google Scholar] [CrossRef]
- Abkenar, S.M.S.; Stanley, S.D.; Miller, C.J.; Chase, D.V.; McElmurry, S.P. Evaluation of genetic algorithms using discrete and continuous methods for pump optimization of water distribution systems. Sustain. Comput. Inform. Syst. 2015, 8, 18–23. [Google Scholar]
- Ferziger, J.H.; Perić, M.; Street, R.L. Computational Methods for Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Fang, K.-T.; Liu, M.-Q.; Qin, H.; Zhou, Y.-D. Theory and Application of Uniform Experimental Designs; Springer: Singapore, 2018. [Google Scholar]
- Jeong, S.; Murayama, M.; Yamamoto, K. Efficient optimization design method using kriging model. J. Aircr. 2005, 42, 413–420. [Google Scholar] [CrossRef]
- Lu, W.G. Numerical Solution for Drawing Design of Large pump Elbow flow channel. Pump Technol. 1992, 1, 11–14. [Google Scholar]
- Guan, X.F. Modern Pump Technical Manual. Astronautic Publishing House: Beijing, China, 1995. [Google Scholar]
- Wang, Y.M.; Shi, S.T. Analysis and application of cross section of flow channel with large pump elbow. J. Jiangsu Agric. Univ. 1994, 15, 75–80. [Google Scholar]
- Girdhar, P.; Moniz, O. Practical Centrifugal Pumps; Elsevier: Amsterdam, The Netherlands, 2011. [Google Scholar]
- Liao, C.T.; Chai, F.S. Design and analysis of two-level factorial experiments with partial replication. Technometrics 2009, 51, 66–74. [Google Scholar] [CrossRef]
- Wu, D.; Rao, H.; Wen, C.; Jia, H.; Liu, Q.; Abualigah, L. Modified Sand Cat Swarm Optimization Algorithm for Solving Constrained Engineering Optimization Problems. Mathematics 2022, 10, 4350. [Google Scholar] [CrossRef]
- GB/T 50265-97; Design Code for Pumping Station. China Planning Press: Beijing, China, 1997.
- Zhu, H.G.; Yuan, S.Q.; Liu, H.L. Numerical simulation of Influence of Elbow inlet Channel on Hydraulic Performance of vertical axial flow pump. Chin. J. Agric. Eng. 2006, 22, 6–9. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Number | H/m | η/% |
|---|---|---|---|
| 1 | 5,744,853 | 6.54 | 66.07 |
| 2 | 6,983,475 | 6.89 | 68.87 |
| 3 | 8,032,376 | 7.10 | 70.66 |
| 4 | 10,062,836 | 7.12 | 70.92 |
| 5 | 14,235,754 | 7.11 | 70.34 |
| Variable | Upper Limit | Lower Limit |
|---|---|---|
| DS-B | 56 | 58 |
| DS-C | 49 | 51 |
| DS-D | 180 | 195 |
| DS-E | 80 | 83 |
| DS-G | 138 | 144 |
| RA | 10 | 25 |
| RB | 35 | 40 |
| LA | 90 | 110 |
| LB | 100 | 120 |
| Factor | P-B Test | Multivariate Analysis of Variance |
|---|---|---|
| DS-B | 0.578 | 0.631 |
| DS-C | 0.0314 | 0.0275 |
| DS-D | 0.0434 | 0.344 |
| DS-E | 0.694 | 0.0563 |
| DS-G | 0.0624 | 0.0415 |
| RA | 0.144 | 0.087 |
| RB | 0.513 | 0.553 |
| LA | 0.0455 | 0.0233 |
| LB | 0.421 | 0.472 |
| Parameters | DS_C | DS_D | DS_G | LA | Efficiency/% | Head/m |
|---|---|---|---|---|---|---|
| Original scheme | 82.64 | 129.12 | 174.99 | 22.0 | 0.721 | 8.023 |
| Optimization scheme | 85.77 | 129.14 | 164.44 | 33.1 | 0.758 | 8.624 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Luo, Y.; Shen, Z.; Ye, D.; Li, Z. Optimization Design of the Elbow Inlet Channel of a Pipeline Pump Based on the SCSO-BP Neural Network. Water 2024, 16, 74. https://doi.org/10.3390/w16010074
Zhang L, Luo Y, Shen Z, Ye D, Li Z. Optimization Design of the Elbow Inlet Channel of a Pipeline Pump Based on the SCSO-BP Neural Network. Water. 2024; 16(1):74. https://doi.org/10.3390/w16010074
Chicago/Turabian StyleZhang, Libin, Yin Luo, Zhenhua Shen, Daoxing Ye, and Zihan Li. 2024. "Optimization Design of the Elbow Inlet Channel of a Pipeline Pump Based on the SCSO-BP Neural Network" Water 16, no. 1: 74. https://doi.org/10.3390/w16010074
APA StyleZhang, L., Luo, Y., Shen, Z., Ye, D., & Li, Z. (2024). Optimization Design of the Elbow Inlet Channel of a Pipeline Pump Based on the SCSO-BP Neural Network. Water, 16(1), 74. https://doi.org/10.3390/w16010074