Dynamic Behavior and Mechanism of Transient Fluid–Structure Interaction in Viscoelastic Pipes Based on Energy Analysis


Abstract
:1. Introduction
2. Methods and Models
2.1. Mathematical Model
- (1)
- Full pipe flow. The pipeline is completely filled with liquid, maintaining a constant average flow rate across any pipeline section throughout the process.
- (2)
- The most basic friction equation is used because of the comparison of friction models. The frictional resistance due to the pipe walls is calculated using the Darcy–Weisbach equation.where is frictional head loss; is friction coefficient along the course (N/m2); l is pipe length (m); D is pipe diameter (m); v is mean velocity in tube (m/s); g is gravitational acceleration (m/s2).
- (3)
- To disregard the inherent characteristics of the material, the changes caused by the heterogeneity of the material are overlooked. The pipeline material is assumed to be homogeneous and isotropic, ensuring uniformity to prevent it from functioning as a gravity flow pipe.
- (4)
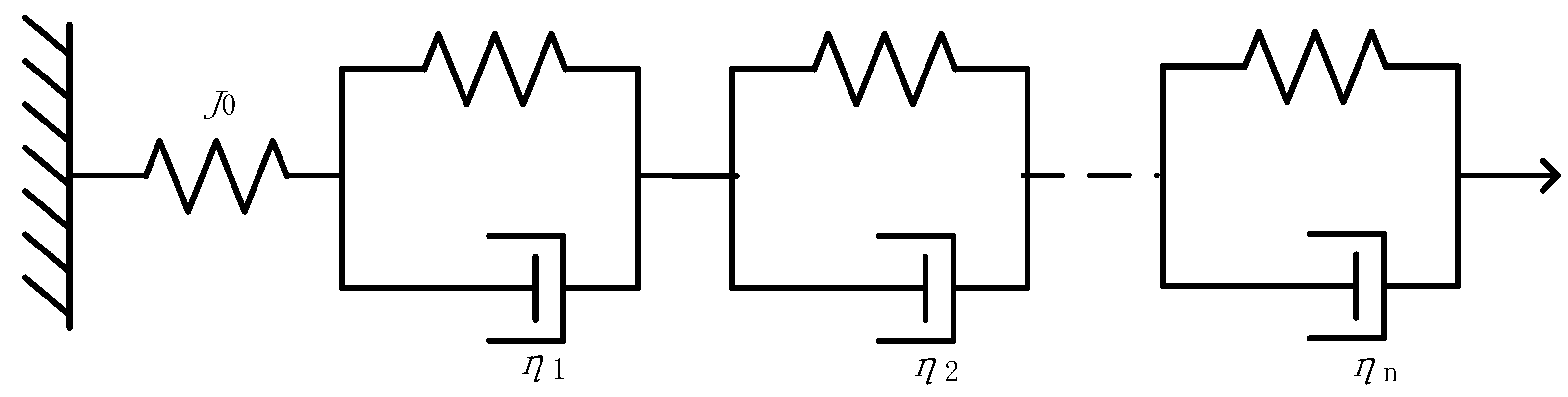
- To streamline the analytical and solution models, linear viscoelastic behavior is assumed. This implies that the tube wall reacts linearly to transient flow excitation, where its stress response is directly proportional to the applied strain.
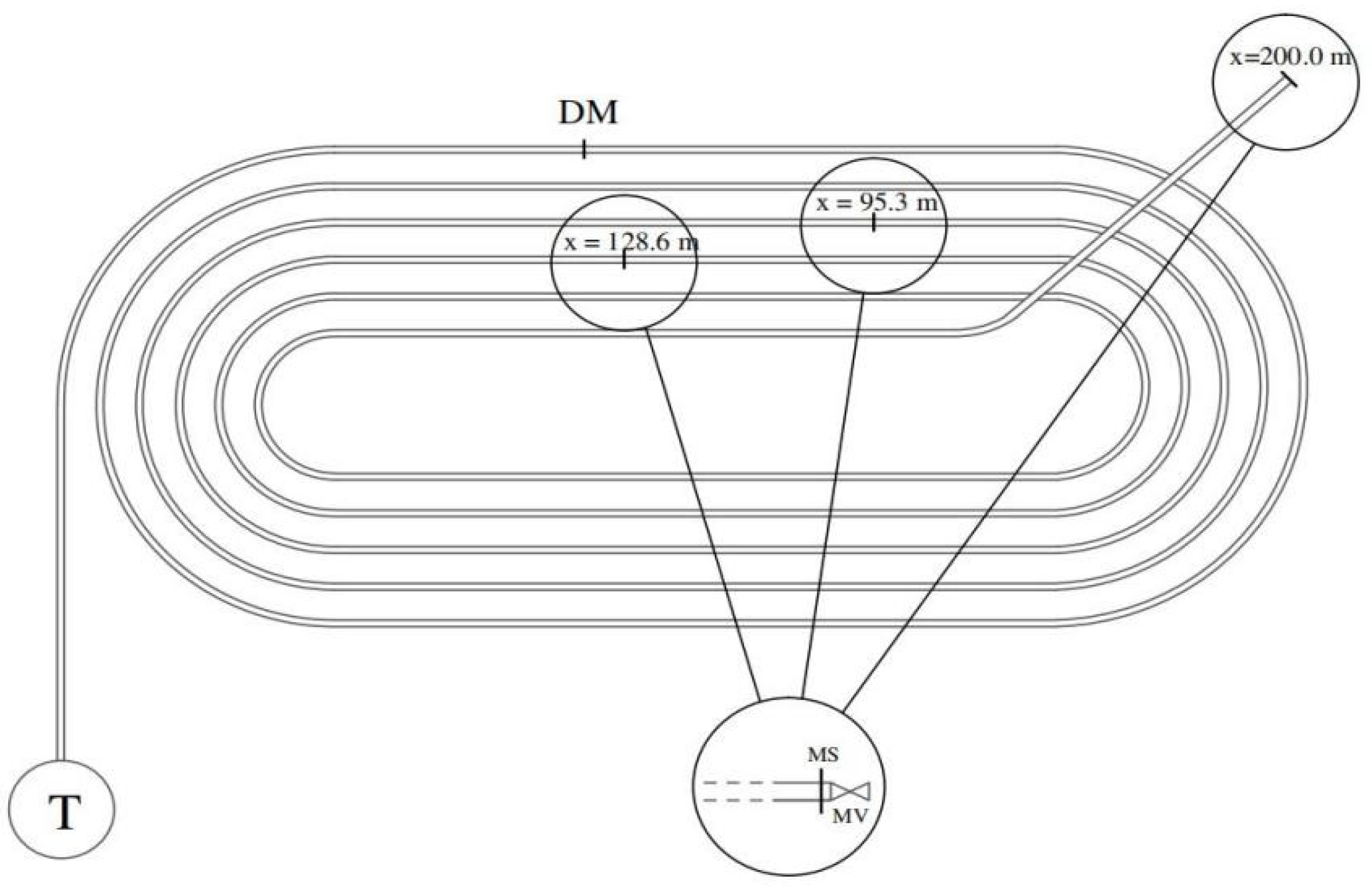
2.2. Physical Model
2.3. Comparison of Experiments on Different Friction Models
3. Results and Discussion
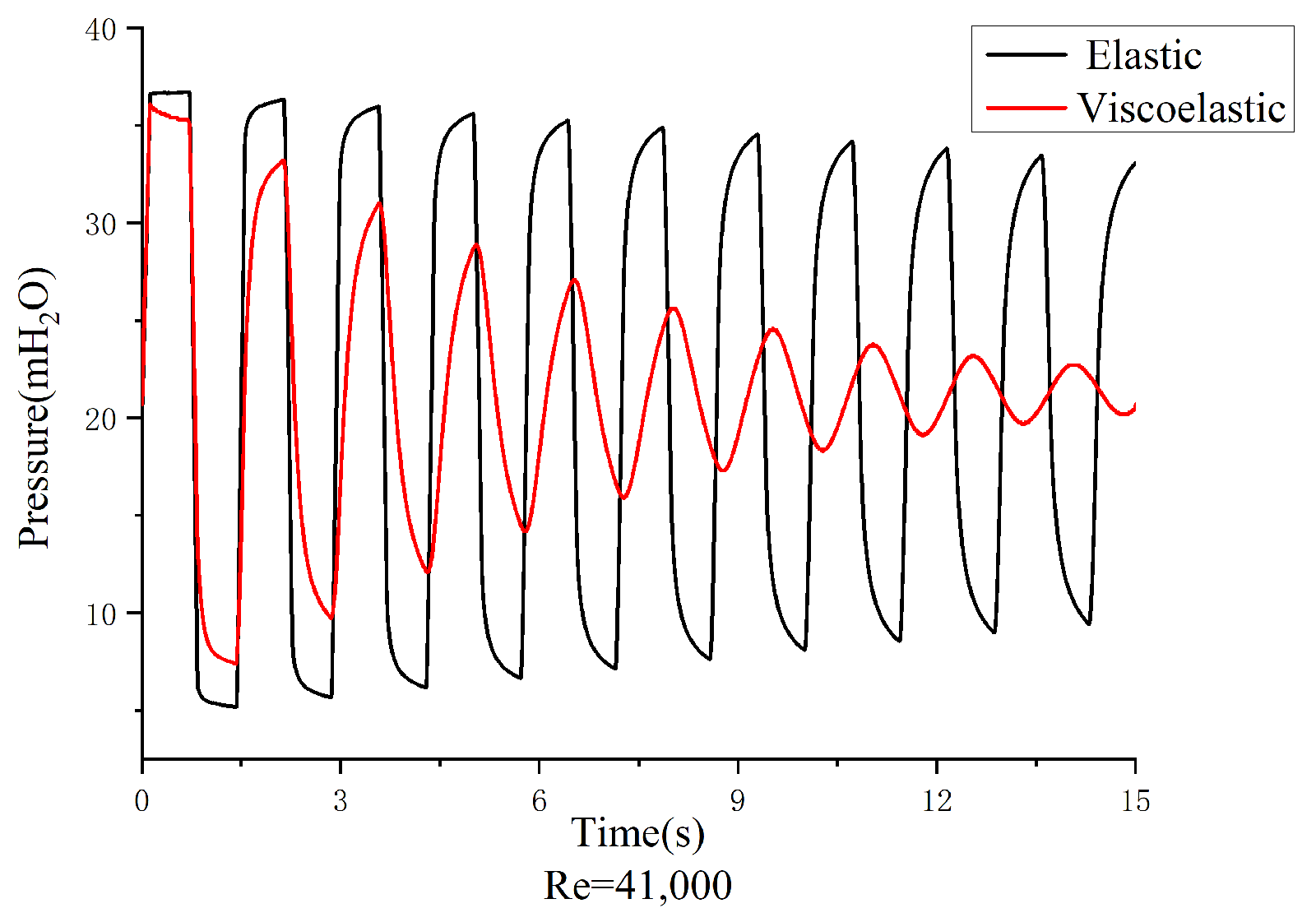
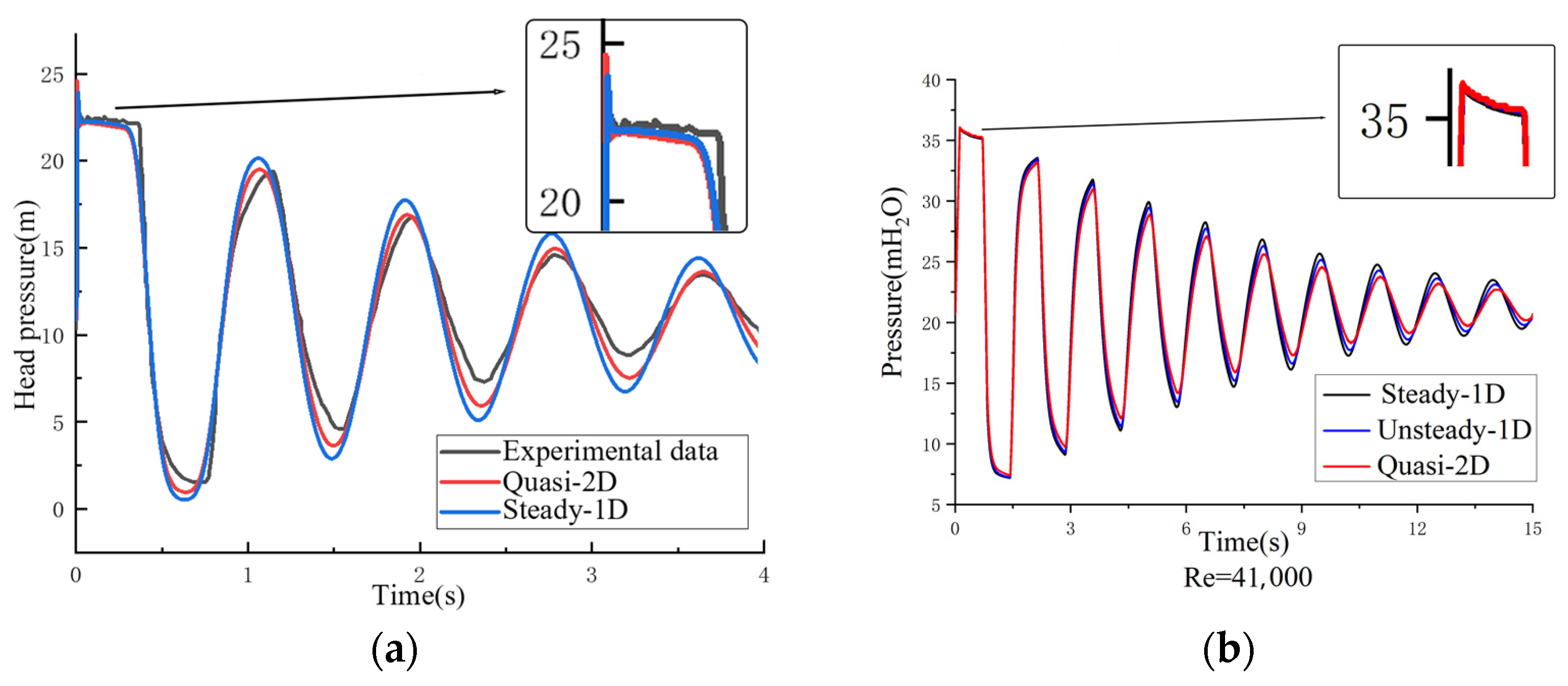
3.1. Influence of Pipe Types on Transient Flow
3.2. Effect of Friction Model on Transient Flow in Viscoelastic Pipes
3.2.1. Two-Dimensional Energy Equation for Transient Flow in Viscoelastic Pipeline
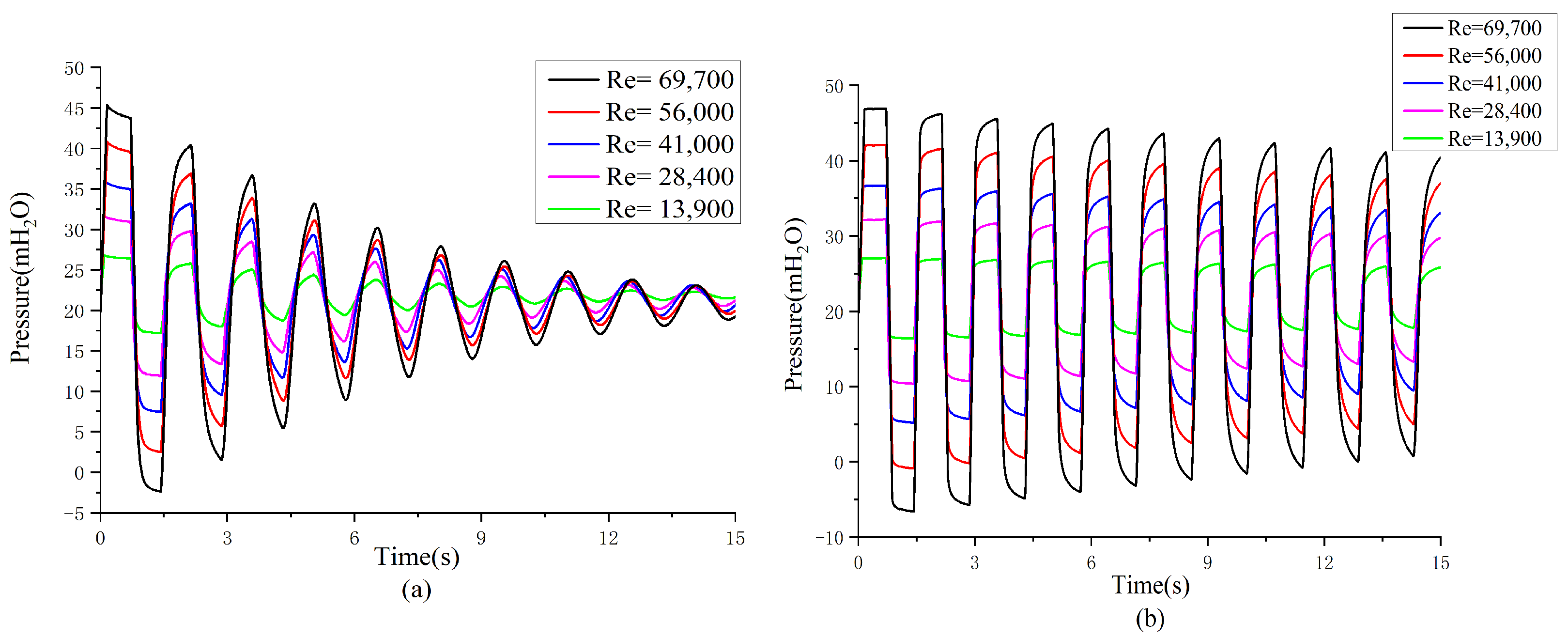
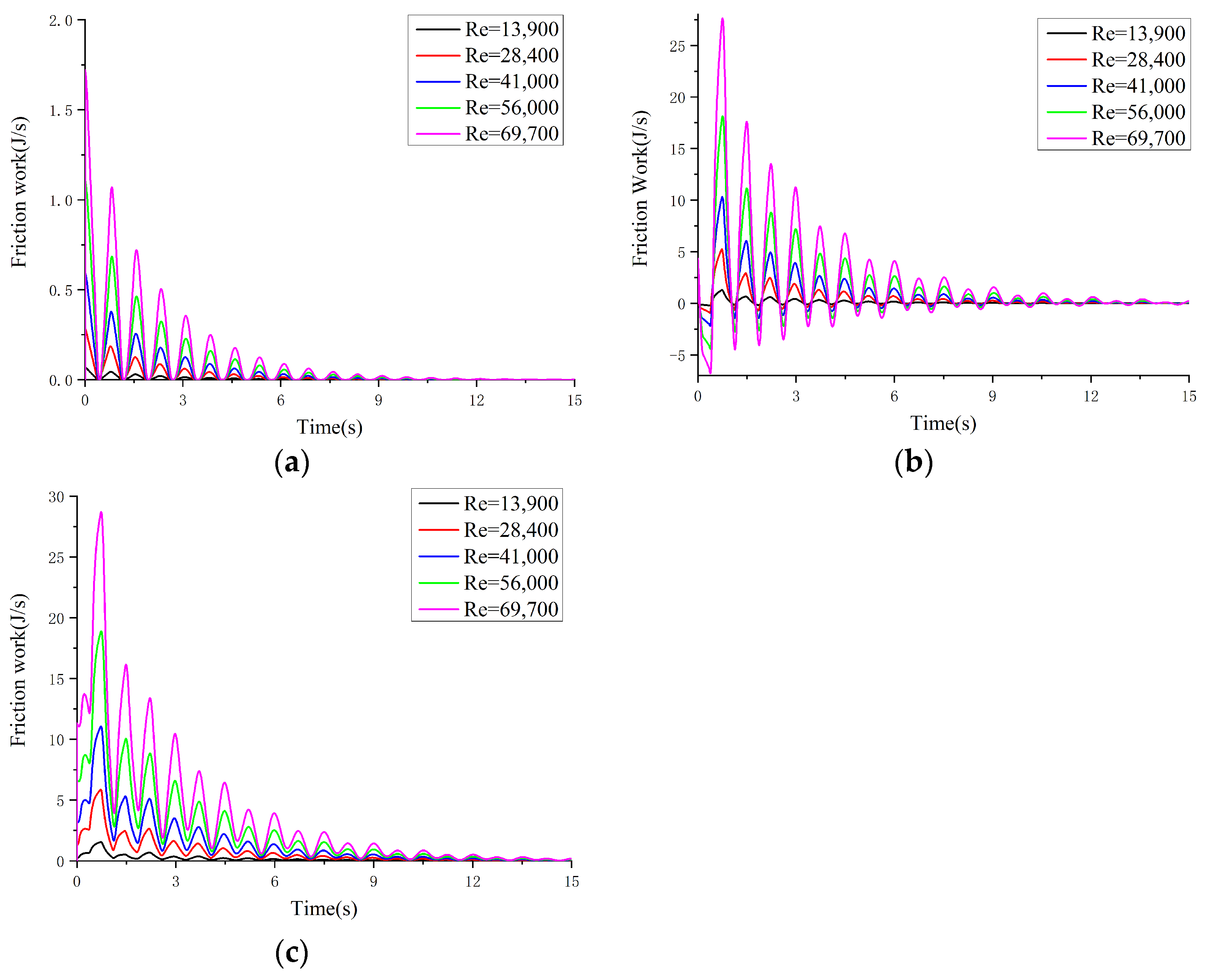
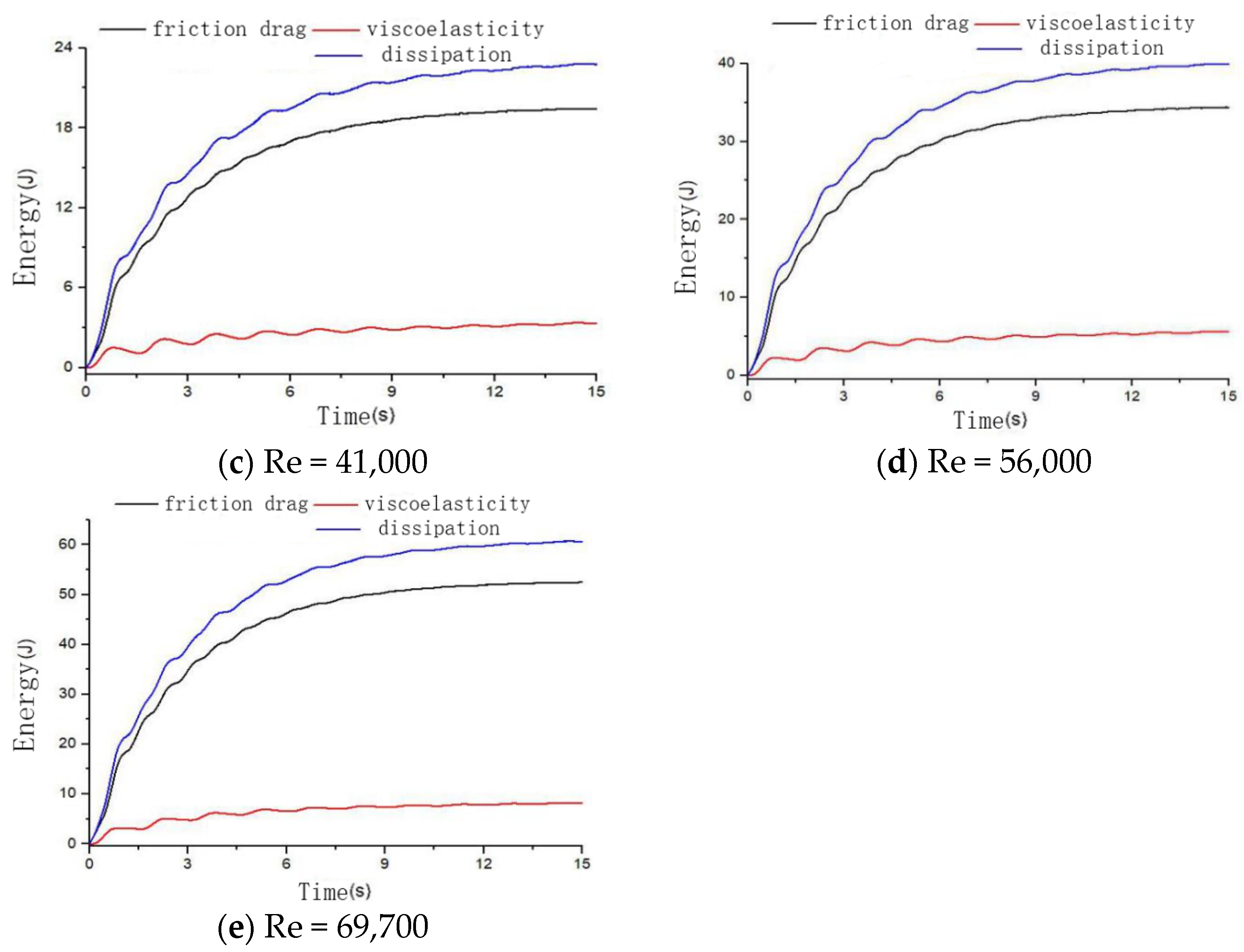
3.2.2. Performance of Friction Models under Different Reynolds Numbers
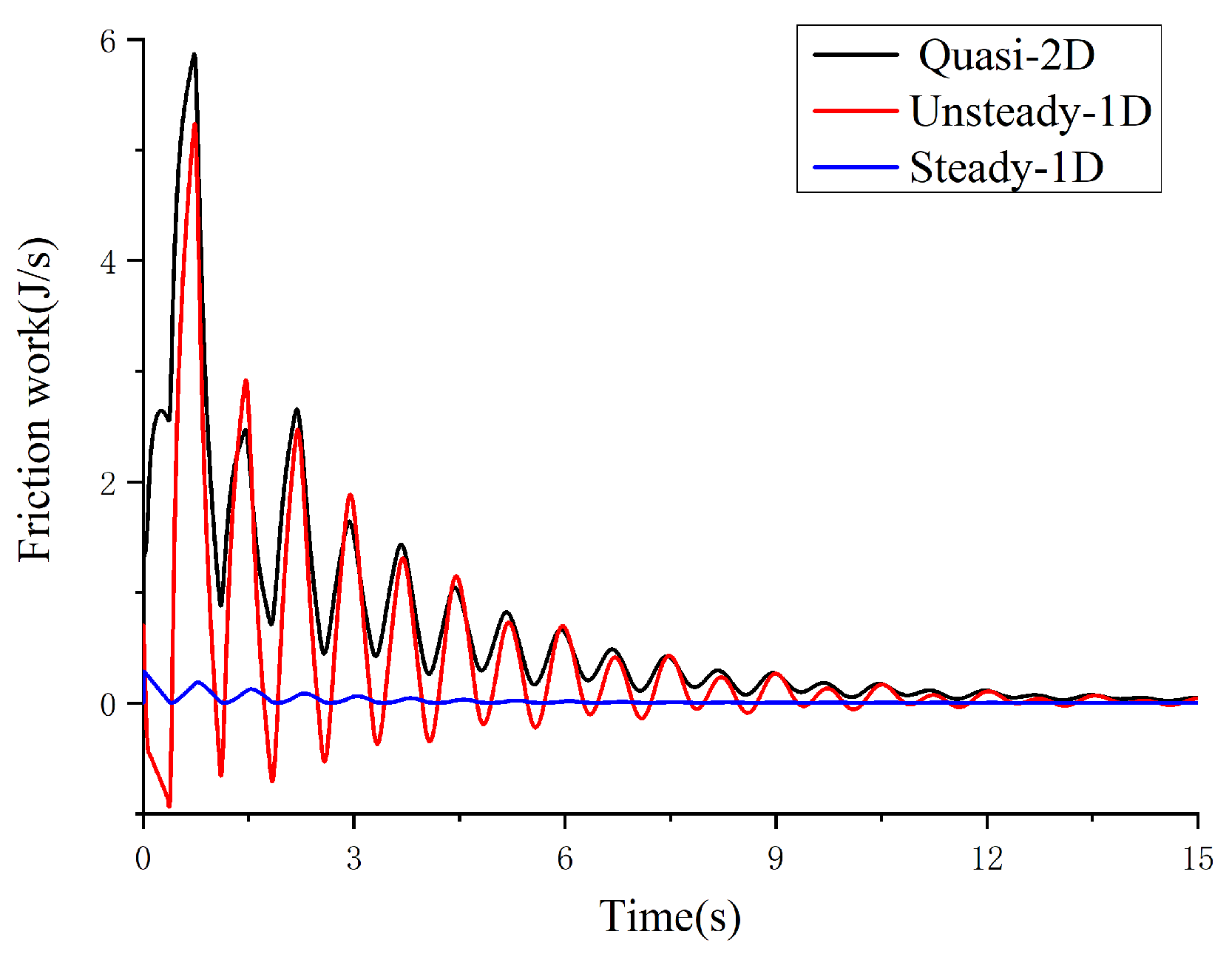
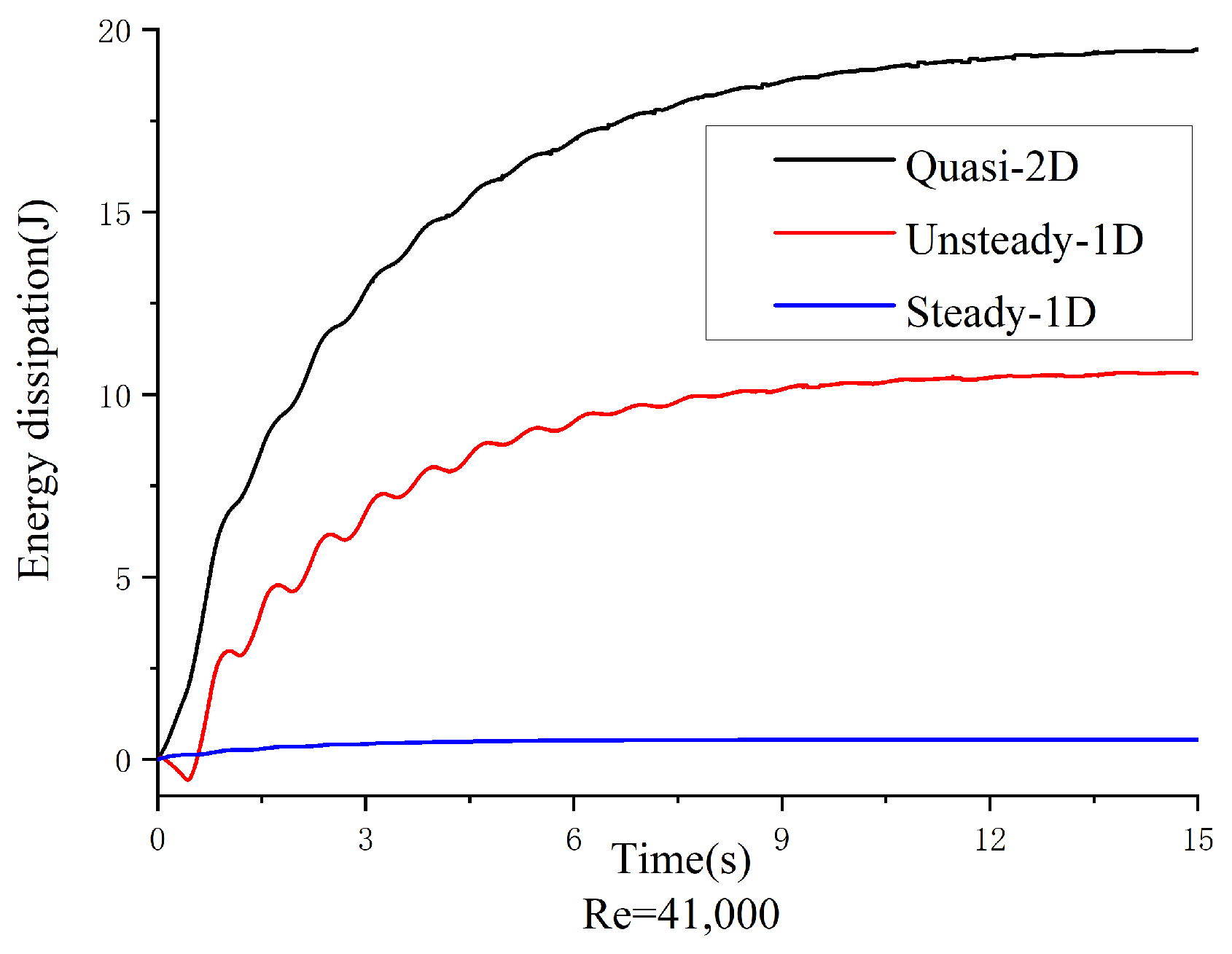
3.3. Selecting the Optimal Friction Model
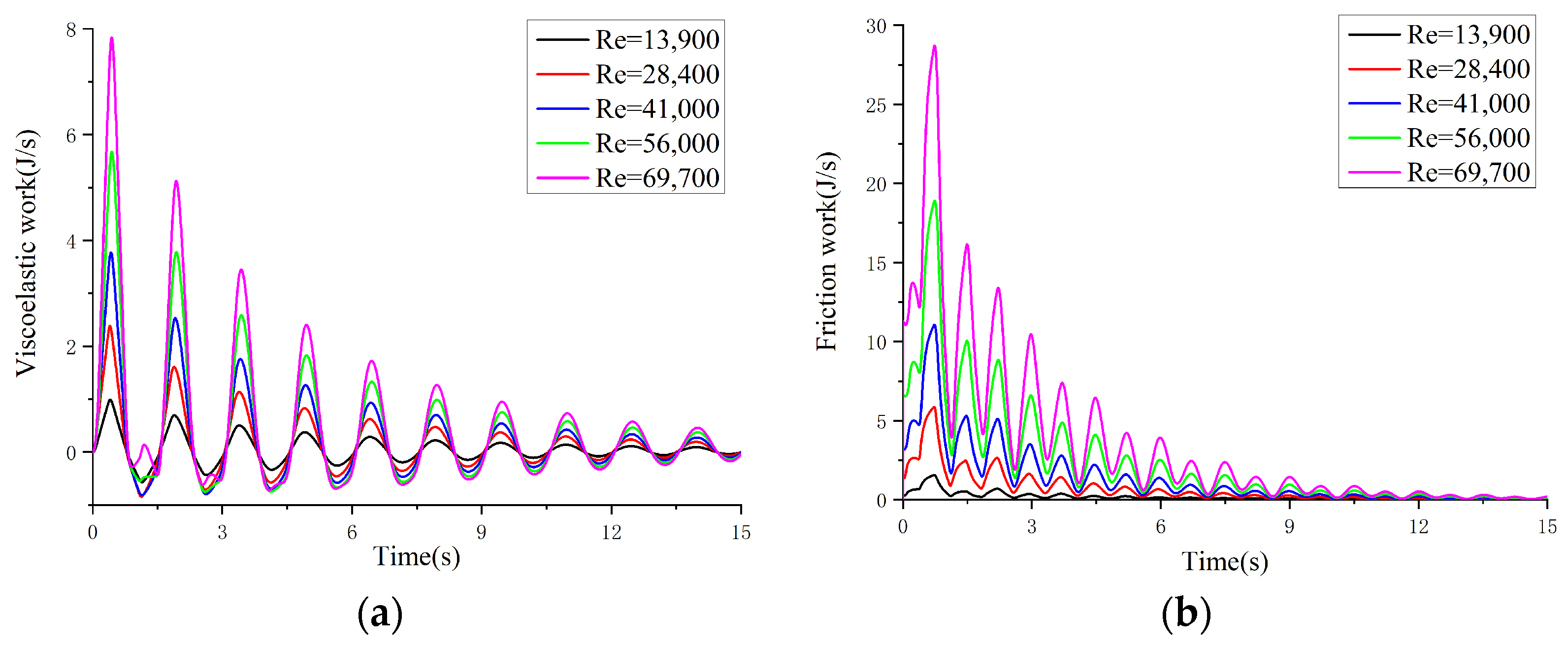
3.4. Quasi-Two-Dimensional Model and Viscoelastic Work
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of Equation (16)
References
- Lupa, S.I.; Gagnon, M.; Muntean, S.; Abdul-Nour, G. The impact of water hammer on hydraulic power units. Energies 2022, 15, 1526. [Google Scholar] [CrossRef]
- Alabtah, F.G.; Mahdi, E.; Eliyan, F.F. The use of fiber reinforced polymeric composites in pipelines: A review. Compos. Struct. 2021, 276, 114595. [Google Scholar] [CrossRef]
- Sun, Q.; Wang, F.X.; Wu, Y.B.; Xu, Y.; Hao, Y.Q. Energy analysis of transient flow with cavitation by considering the effect of water temperature in viscoelastic pipes. J. Hydroinformatics 2023, 25, 2034–2052. [Google Scholar] [CrossRef]
- Andrade, D.M.; Rachid, F.B.D.; Tijsseling, A.S. Fluid transients in viscoelastic pipes via an internal variable con-stitutive theory. Appl. Math. Model. 2023, 114, 846–869. [Google Scholar] [CrossRef]
- Gally, M.; Güney, M.; Rieutord, E. Investigation of pressure transients in viscoelastic pipes. J. Fluids Eng. 1979, 101, 495–499. [Google Scholar] [CrossRef]
- Mousavifard, M.; Norooz, R. Numerical analysis of transient cavitating pipe flow by Quasi 2D and 1D models. J. Hydraul. Res. 2022, 60, 295–310. [Google Scholar] [CrossRef]
- Wylie, E.B.; Streeter, V.L.; Suo, L. Fluid Transients in Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Chen, M.; Pu, J. Practical calculation method for friction loss transient flow in long distance pipelines. Oil Gas Storage Transp. 2008, 27, 17–21. [Google Scholar] [CrossRef]
- Liu, G.; Pu, J. Effect of transient current friction calculation and friction on hydraulic transients. Mech. Pract. 2003, 25, 3. [Google Scholar] [CrossRef]
- Brunone, B.; Golia, U.M.; Greco, M. Some Remarks on the Momentum Equation for Fast Transients. In Proceedings of the International Meeting on Hydraulic Transients with Water Column Separation (9th Round Table of the IAHR Group), Valencia, Spain, 4–6 September 1991; pp. 201–209. Available online: https://www.mendeley.com/catalogue/c6168492-8039-3fc8-a17f-7dda88d77736/ (accessed on 8 April 2024).
- Daily, W.L.; Hankey, W.L., Jr.; Olive, R.W.; Jordaan, J.M., Jr. Resistance coefficients for accelerated and decelerated flows through smooth tubes and orifices. Trans. ASME 1956, 78, 1071–1077. [Google Scholar] [CrossRef]
- Guo, X.; Gao, Y. Nonconstant friction model of transient flow in pipeline leakage detection. J. Hydroelectr. Power Gener. 2008, 27, 42–47. (In Chinese) [Google Scholar]
- Ohmi, M.; Kyomen, S.; Usui, T. Numerical analysis of transient turbulent flow in a liquid line. Bull. Jpn. Soc. Mech. Eng. 1985, 28, 799–806. [Google Scholar] [CrossRef]
- Vardy, A.E.; Hwang, K. A characteristics model of transient friction in pipes. J. Hydraul. Res. 1991, 29, 669–684. [Google Scholar] [CrossRef]
- Duan, H.F.; Ghidaoui, M.S.; Lee, P.J.; Tung, Y.K. Unsteady friction viscoelasticity in pipe fluid transients. J. Hydraul. Res. 2010, 48, 354–362. [Google Scholar] [CrossRef]
- Pezzinga, G.; Brunone, B.; Meniconi, S. Relevance of pipe period on Kelvin-Voigt viscoelastic parameters: 1D and 2D inverse transient analysis. J. Hydraul. Eng. 2016, 142, 04016063. [Google Scholar] [CrossRef]
- Wahba, E.M. On the two-dimensional characteristics of laminar fluid transients in viscoelastic pipes. J. Fluids Struct. 2017, 68, 113–124. [Google Scholar] [CrossRef]
- Meniconi, S.; Duan, F.H.; Brunone, B.; Ghidaoui, M.S.; Lee, P.J.; Ferrante, M. Further developments in rapidly decelerating turbulent pipe flow modeling. J. Hydraul. Eng. 2014, 140, 04014028. [Google Scholar] [CrossRef]
- Duan, H.F.; Ghidaoui, M.S.; Tung, Y.K. Energy analysis of viscoelasticity effect in pipe fluid transients. J. Appl. Mech. 2010, 77, 044503. [Google Scholar] [CrossRef]
- Duan, H.F.; Meniconi, S.; Lee, P.J.; Brunone, B.; Ghidaoui, M.S. Local and integral energy-based evaluation for the unsteady friction relevance in transient pipe flows. J. Hydraul. Eng. 2017, 143, 04017015. [Google Scholar] [CrossRef]
- Wu, K.; Feng, Y.; Xu, Y.; Liang, H.; Liu, G. Energy Analysis of a quasi-two-dimensional friction model for simulation of transient flows in viscoelastic pipes. Water 2022, 14, 3258. [Google Scholar] [CrossRef]
- Yu, H.; Li, F.; Yang, H.; Zhang, L. Nonlinear high elastic-viscoelastic constitutive model of rubber materials under finite deformation. Rubber Ind. 2017, 64, 645–649. [Google Scholar] [CrossRef]
- Keramat, A.; Kolahi, A.G.; Ahmadi, A. Water hammer modelling of viscoelastic pipes with a time-dependent Poisson’s ratio. J. Fluids Struct. 2013, 43, 164–178. [Google Scholar] [CrossRef]
- Bradford, S.F. Development of a Godunov-type model for the accurate simulation of dispersion dominated waves. Ocean Model. 2016, 106, 58–67. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Firkowski, M. Extended Bubble Cavitation Model to predict water hammer in viscoelastic pipelines. J. Phys. Conf. Ser. 2018, 1101, 012046. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Rate of Flow (L/s) | Reynolds Number | HT,0 (m) | C1 (×10−2 m/s) | C2 (×10−3 m/s2) | C3 (×10−5 m/s2) | Valve Shutdown Time (s) |
|---|---|---|---|---|---|---|---|
| 1 | 1 | 13,900 | 21.63 | 2.32 | −0.685 | 0.925 | 0.0875 |
| 2 | 2.04 | 28,400 | 21.13 | 5.03 | −1.52 | 2.4 | 0.0752 |
| 3 | 2.95 | 41,000 | 20.74 | 6.33 | −1.65 | 2.33 | 0.1188 |
| 4 | 4.03 | 56,000 | 20.34 | 7.93 | −1.82 | 2.27 | 0.1575 |
| 5 | 5.02 | 69,700 | 19.82 | 9.37 | −2.1 | 2.49 | 0.1533 |
| Number | Temperature (°C) | Initial Pressure (105 Pa) | Initial Flow Rate (m/s) | Kinetic Viscosity (10−i m2/s) | Reynolds Number | Volume Modulus (109 Pa) | Water Density (kg/m3) |
|---|---|---|---|---|---|---|---|
| 1 | 25 | 1.0661 | 0.55 | 0.892 | 25,650 | 2.24 | 997.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Zhang, S.; Zhou, L.; Ning, H.; Wu, K. Dynamic Behavior and Mechanism of Transient Fluid–Structure Interaction in Viscoelastic Pipes Based on Energy Analysis. Water 2024, 16, 1468. https://doi.org/10.3390/w16111468
Xu Y, Zhang S, Zhou L, Ning H, Wu K. Dynamic Behavior and Mechanism of Transient Fluid–Structure Interaction in Viscoelastic Pipes Based on Energy Analysis. Water. 2024; 16(11):1468. https://doi.org/10.3390/w16111468
Chicago/Turabian StyleXu, Ying, Shuang Zhang, Linfeng Zhou, Haoran Ning, and Kai Wu. 2024. "Dynamic Behavior and Mechanism of Transient Fluid–Structure Interaction in Viscoelastic Pipes Based on Energy Analysis" Water 16, no. 11: 1468. https://doi.org/10.3390/w16111468
APA StyleXu, Y., Zhang, S., Zhou, L., Ning, H., & Wu, K. (2024). Dynamic Behavior and Mechanism of Transient Fluid–Structure Interaction in Viscoelastic Pipes Based on Energy Analysis. Water, 16(11), 1468. https://doi.org/10.3390/w16111468