
Numerical Study on the Influence of Installation Height and Operating Frequency of Biomimetic Pumps on the Incipient Motion of Riverbed Sediment

Abstract
1. Introduction
2. Working Principle and Geometric Model of Biomimetic Pumps
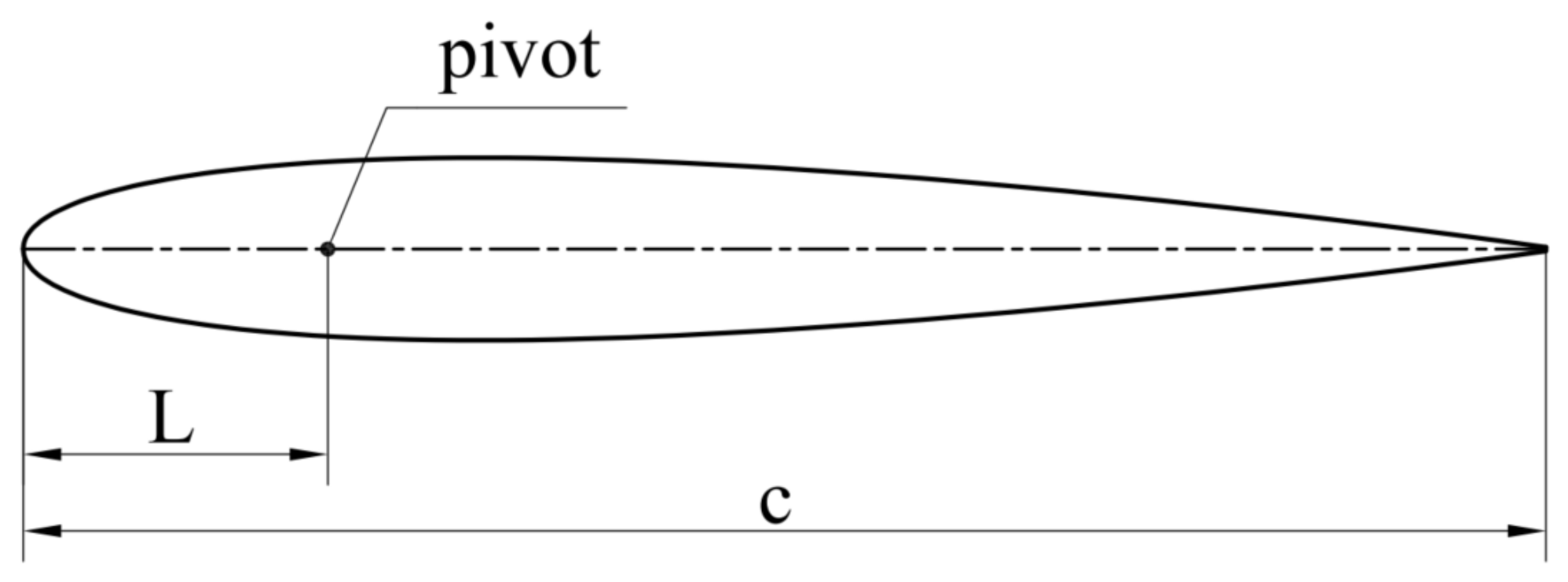
2.1. Geometric Model of Biomimetic Hydrofoils
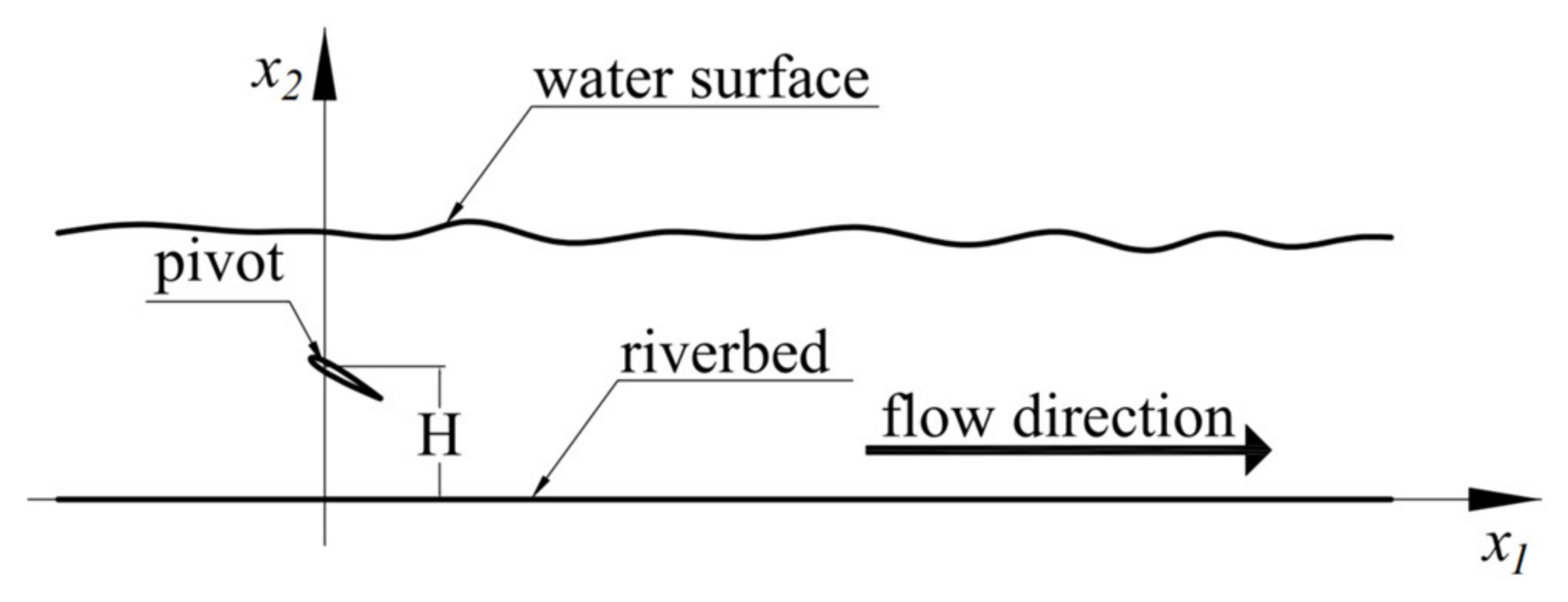
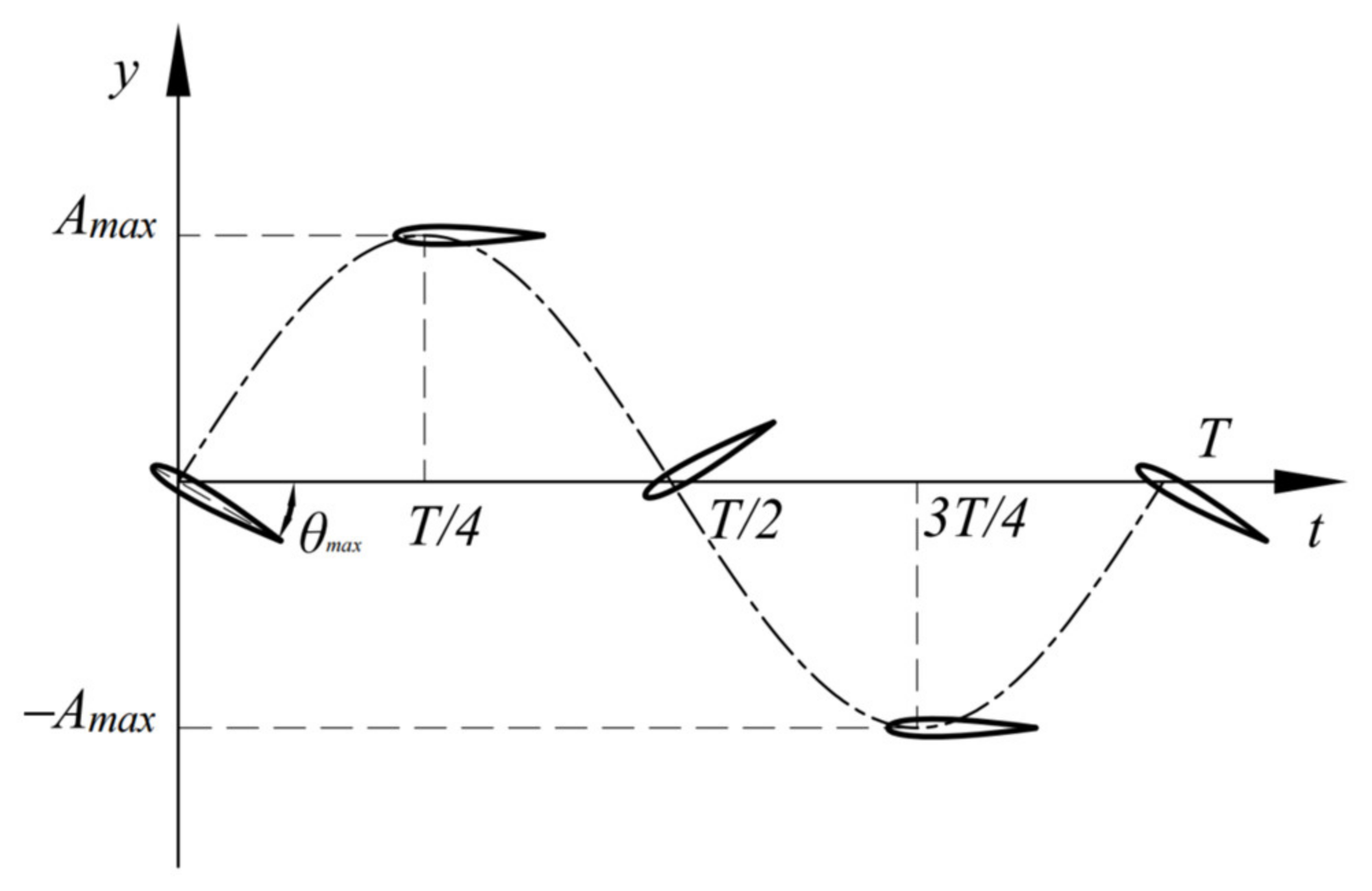
2.2. Working Principle of Biomimetic Pumps
3. Numerical Method
3.1. Governing Equation and Turbulence Model
3.2. Time-Averaged Bottom Velocity Formula
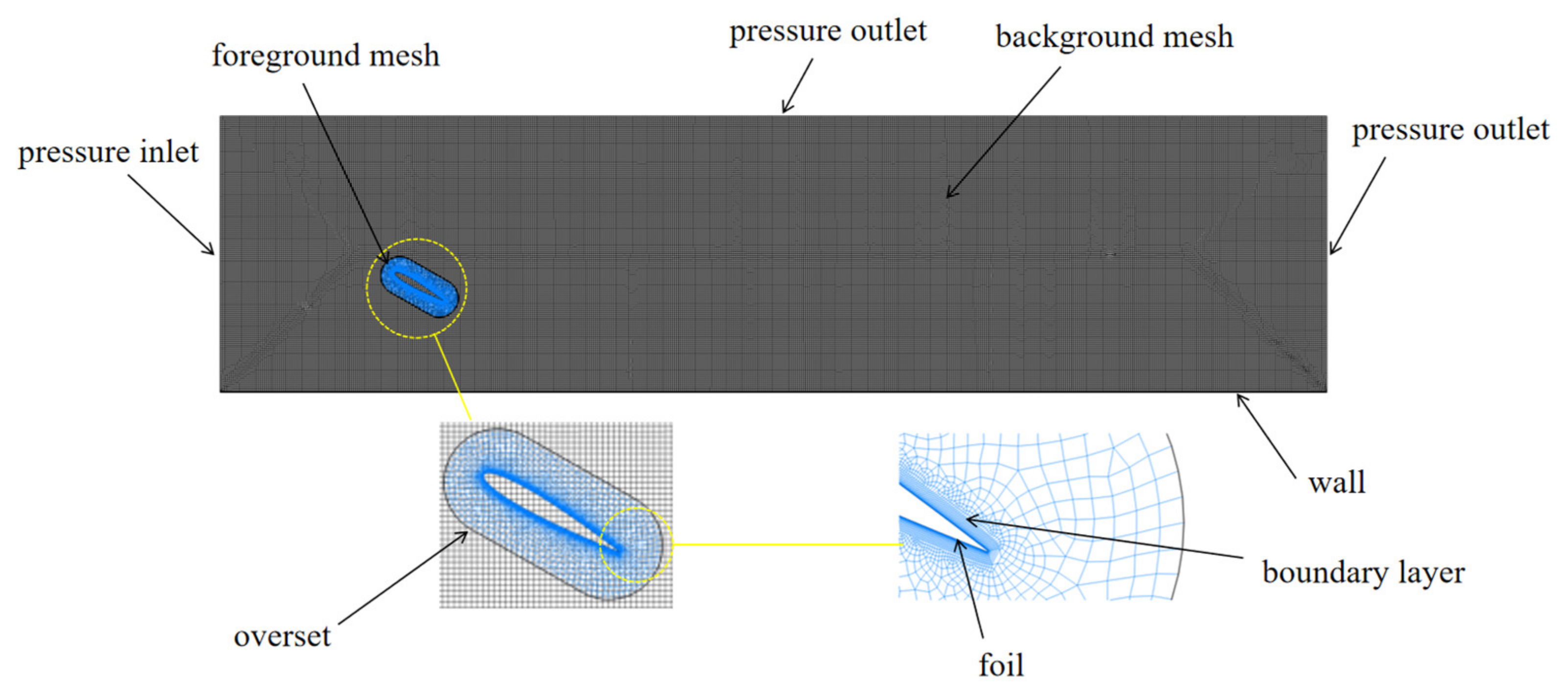
3.3. Mesh Generation and Computational Setup
3.4. Grid Independence Verification
3.5. Method Validation
4. Results and Discussion
4.1. Effect of Installation Height and Operating Frequency on Maximum Near-Bed Velocity
4.2. Effect of Installation Height and Operating Frequency on the Location of the Maximum Near-Bed Velocity Point
4.3. Threshold Frequency for Sediment Incipient Motion at Specific Installation Heights
5. Conclusions
- (1)
- Changing the installation height and operating frequency of the biomimetic pump can significantly affect the maximum near-bed velocity, thereby impacting the sediment at the bottom. Through numerical simulation, this paper concludes that the minimum value of the maximum near-bed velocity is reached when the biomimetic pump is installed at a height of 3 c and an operating frequency of 0.5 Hz. Conversely, the maximum value is achieved at an installation height of 4 c and an operating frequency of 5 Hz. When the installation height of the biomimetic pump remains constant, as the operating frequency increases, the maximum near-bed velocity also correspondingly increases, following a quadratic function relationship. When the frequency remains constant and the installation height gradually increases, with the height less than or equal to 3 c, the maximum near-bed velocity gradually decreases, reducing the impact of the water on the sediment, reaching the minimum impact at 3 c. However, when the installation height exceeds 3 c, the maximum near-bed velocity begins to increase again, even surpassing the maximum near-bed velocity at the lowest installation height, thereby increasing the impact of the water on the sediment once more;
- (2)
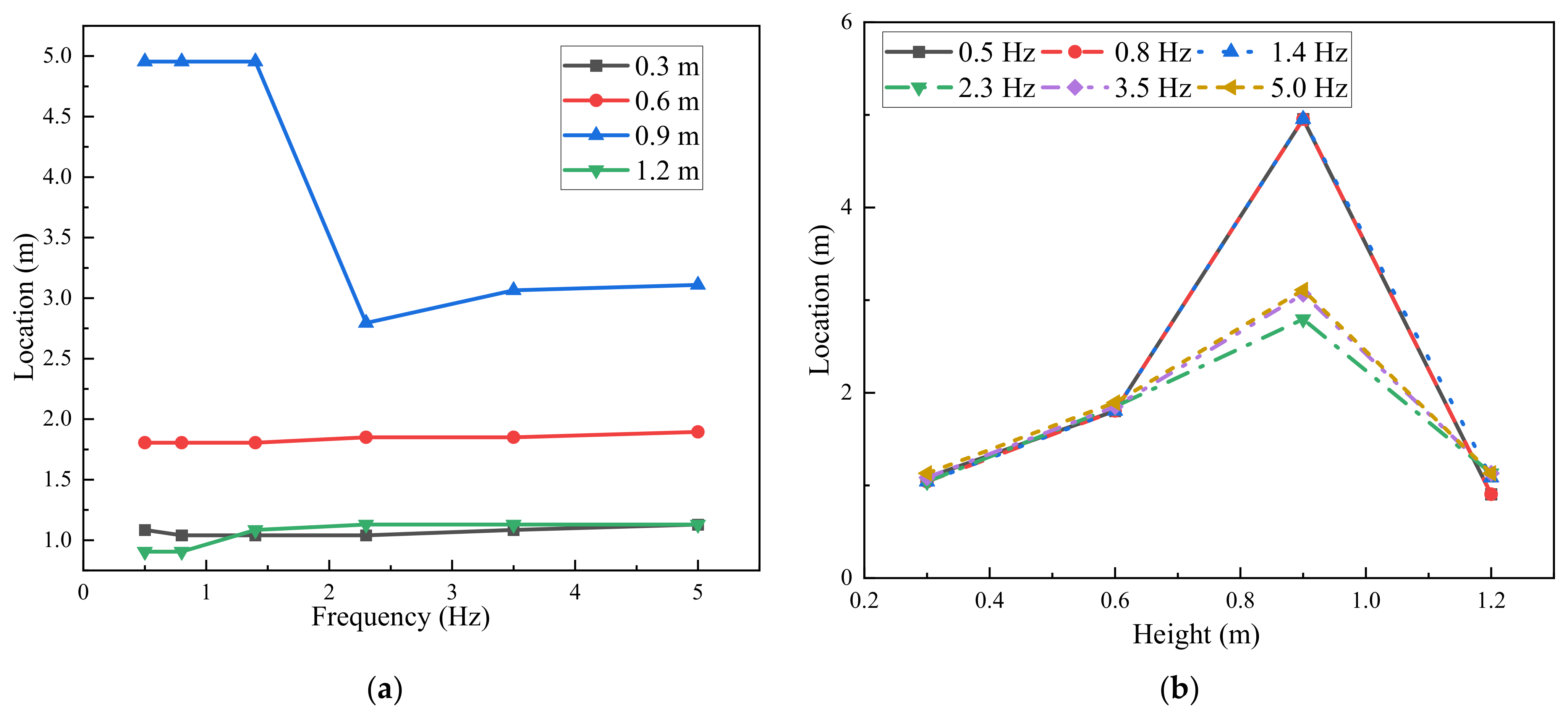
- The location of the maximum near-bed velocity point corresponds to the position at which maximum erosion of the sediment occurs. Through numerical simulation, this paper finds that the position where the maximum erosion of the sediment is farthest from the biomimetic pump occurs when the installation height is 3 c and the operating frequency is 0.5 Hz. Conversely, it is closest to the biomimetic pump when the installation height is 4 c and the operating frequency is 0.5 Hz. When the installation height remains constant at c, 2 c, or 4 c, the position where maximum erosion of the sediment does not change significantly with varying operating frequencies. However, when the installation height is 3 c, as the operating frequency increases, the distance between the position where maximum erosion of the sediment and the biomimetic pump rapidly decreases from the farthest point, eventually stabilizing with further increases in operating frequency. When the operating frequency is constant, as the installation height increases, the distance between the position where maximum erosion of the sediment and the biomimetic pump significantly increases, reaching a maximum at an installation height of 3 c, and then gradually decreases;
- (3)
- To facilitate the rapid approximation of the required biomimetic pump parameters through interpolation and to reduce the complexity of parameter calculation, we obtained the threshold frequencies for sediment incipient motion at installation heights of c, 2 c, 3 c, and 4 c through numerical simulations as 1.15 Hz, 1.64 Hz, 2.85 Hz, and 1.06 Hz, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luo, D.L.; Lu, P.D.; Yu, G.H. Study on the activity of the contaminative water and the impact on the water pollution of change in urban river-net in the east plain region of China. Environ. Eng. 2011, 29, 59–62. [Google Scholar]
- Phillips, J.D.; Slattery, M.C. Downstream trends in discharge, slope, and stream power in a lower coastal plain river. J. Hydrol. 2007, 334, 290–303. [Google Scholar] [CrossRef]
- Hongzhe, P.; Chunyan, T.; Acharya, K.; Jian, Z.; Jian, Z.; Ya, Z.; Yixin, C.; Yue, C.; Shan, Y.; Zhenwu, Y. Evaluation of the effect of water diversion on improving water environment in plain river network under the multi-objective optimization. J. Lake Sci. 2021, 33, 1138–1152. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, Y.j.; Zhang, R.; Ge, X.F.; Sun, A. Analysis on Unsteady Stall Flow Characteristics of Axial-flow Pump. Trans. Chin. Soc. Agric. Mach. 2017, 48, 127–135. [Google Scholar]
- Xu, H.; Gong, Y.; Cao, C.J.; Chen, H.X.; Kan, K.; Feng, J.G. 3D Start-up Transition Process of Full Flow System for Shaft-extention Tubular Pump Station. Trans. Chin. Soc. Agric. Mach. 2021, 52, 143–151. [Google Scholar]
- Hua, E.T.; Zhu, W.; Xie, R.; Su, Z.; Luo, H.; Qiu, L. Comparative Analysis of the Hydrodynamic Performance of Arc and Linear Flapping Hydrofoils. Processes 2023, 11, 1579. [Google Scholar] [CrossRef]
- Hua, E.T.; Luo, H.T.; Xie, R.; Chen, W.; Tang, S.; Jin, D. Investigation on the Influence of Flow Passage Structure on the Performance of Bionic Pumps. Processes 2022, 10, 2569. [Google Scholar] [CrossRef]
- Lin, T.; Xia, W.; Pecora, R.; Wang, K.; Hu, S. Performance improvement of flapping propulsions from spanwise bending on a low-aspect-ratio foil. Ocean Eng. 2023, 284, 115305. [Google Scholar] [CrossRef]
- Du, X.X.; Zhang, Z.D. Numerical analysis of influence of four flapping modes on propulsion performance of underwater flapping foils. Eng. Mech. 2018, 35, 249–256. [Google Scholar]
- Ding, H.; Song, B.W.; Tian, W.L. Exploring Propulsion Performance Analysis of Bionic Flapping Hydrofoil. J. Northwestern Polytech. Univ. 2013, 31, 150–156. [Google Scholar]
- Li, G.Z.; Chang, X.; Deng, N.Y.; Yu, P.Y. Research on the propulsive performance of the non-sinusoidal plunging in-line tandem hydrofoils. Ship Sci. Technol. 2022, 44, 94–100. [Google Scholar]
- Hua, E.T.; Su, Z.X.; Xie, R.S.; Chen, W.Q.; Tang, S.W.; Luo, H.T. Optimization and experimental verification of pivot position of flapping hydrofoil. J. Hydroelectr. Eng. 2023, 42, 128–138. [Google Scholar]
- Hua, E.T.; Chen, W.Q.; Tang, S.W.; Xie, R.S.; Guo, X.M.; Xu, G.H. Water Pushing Flow Characteristics of Flapping Hydrofoil Device in Small River. Trans. Chin. Soc. Agric. Mach. 2022, 53, 154–162. [Google Scholar]
- Li, F.; Yu, P.; Deng, N.; Li, G.; Wu, X. Numerical analysis of the effect of the non-sinusoidal trajectories on the propulsive performance of a bionic hydrofoil. J. Appl. Fluid Mech. 2022, 15, 917–925. [Google Scholar]
- Zhou, J.; Yan, W.; Mei, L.; Shi, W. Performance of Semi-Active Flapping Hydrofoil with Arc Trajectory. Water 2023, 15, 269. [Google Scholar] [CrossRef]
- Mei, L.; Zhou, J.; Yu, D.; Shi, W.; Pan, X.; Li, M. Parametric analysis for underwater flapping foil propulsor. Water 2021, 13, 2103. [Google Scholar] [CrossRef]
- Yang, J.Q.; Tang, L.M.; Huang, P.; Sun, J. Study on incipient velocity of fine sediment in Yongiiang River Estuary. Water Resour. Hydropower Eng. 2018, 49, 149–154. [Google Scholar]
- Zhou, S.F.; Huang, Z.W.; Wang, Z.C. Experimental study on initiation law of consolidated cohesive sediment in Poyang Lake. J. Hohai Univ. (Nat. Sci.) 2023, 51, 99–104. [Google Scholar]
- Sun, Z.L.; Zhang, C.C.; Huang, S.H.; Liang, X. Scour of cohesive nonuniform sediment. J. Sediment Res. 2011, 3, 44–48. [Google Scholar]
- Xiao, H.; Cao, Z.D.; Zhao, Q.; Han, H.S. Experimental study on incipient motion of coherent silt under wave and flow action. J. Sediment Res. 2009, 3, 75–80. [Google Scholar]
- Shaheed, R.; Mohammadian, A.; Kheirkhah, G.H. A comparison of standard k–ε and realizable k–ε turbulence models in curved and confluent channels. Environ. Fluid Mech. 2019, 19, 543–568. [Google Scholar] [CrossRef]
- Wu, Z.S.; Zhang, G.G.; Kou, T.; Gao, Y.; Li, L.L. Research on Sediment Incipient Velocity Based on Probability Statistics Theory. J. Chang. River Sci. Res. Inst. 2017, 34, 7–11. [Google Scholar]
- Zhong, X.Y.; Wang, C.H.; Yu, C.R.; Wen, L.; Duan, P.Y. Characteristics of sediments and nutrient release under different flow velocity. Acta Sci. Circumstantiae 2017, 37, 2862–2869. [Google Scholar]
- Ma, Z.P.; Zhang, G.G.; Gao, G.Y.; Tian, G.Z. Discussion on incipient condition of a noncohesive sediment particle on slope under 3D flow. J. Sediment Res. 2014, 39, 36–41. [Google Scholar]
- Schouveiler, L.; Hover, F.S.; Triantafyllou, M.S. Performance of flapping foil propulsion. J. Fluids Struct. 2005, 20, 949–959. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree of Sediment Incipient Motion | Incipient Velocity /(cm·s−1) | The Friction Velocity from the Literature /(cm·s−1) | Results from Formula Calculations /(cm·s−1) |
|---|---|---|---|
| Individual Sediment Movement | 18.0 | 1.48 | 1.58 |
| Minor Sediment Movement | 22.2 | 1.87 | 1.95 |
| Mass Sediment Movement | 28.4 | 2.39 | 2.50 |
| Operating Frequencies (Hz) | Installation Heights (m) | |||
|---|---|---|---|---|
| 0.3 | 0.6 | 0.9 | 1.2 | |
| 0.5 | 0.028 | 0.015 | 0.004 | 0.040 |
| 0.8 | 0.066 | 0.036 | 0.009 | 0.083 |
| 1.4 | 0.176 | 0.099 | 0.026 | 0.190 |
| 2.3 | 0.408 | 0.237 | 0.089 | 0.479 |
| 3.5 | 0.796 | 0.487 | 0.212 | 0.965 |
| 5.0 | 1.371 | 0.875 | 0.399 | 1.676 |
| Operating Frequencies (Hz) | Installation Heights (m) | |||
|---|---|---|---|---|
| 0.3 | 0.6 | 0.9 | 1.2 | |
| 0.5 | 1.085 | 1.805 | 4.955 | 0.905 |
| 0.8 | 1.040 | 1.805 | 4.955 | 0.905 |
| 1.4 | 1.040 | 1.805 | 4.955 | 1.085 |
| 2.3 | 1.040 | 1.850 | 2.795 | 1.130 |
| 3.5 | 1.085 | 1.850 | 3.065 | 1.130 |
| 5.0 | 1.130 | 1.895 | 3.110 | 1.130 |
| Installation Height | Polynomial Formula |
|---|---|
| 0.3 m | |
| 0.6 m | |
| 0.9 m | |
| 1.2 m |
| Installation Height | Threshold Frequencies |
|---|---|
| 0.3 m | 1.15 Hz |
| 0.6 m | 1.64 Hz |
| 0.9 m | 2.85 Hz |
| 1.2 m | 1.06 Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, E.; Song, Y.; Lu, C.; Xiang, M.; Wang, T.; Sun, Q. Numerical Study on the Influence of Installation Height and Operating Frequency of Biomimetic Pumps on the Incipient Motion of Riverbed Sediment. Water 2024, 16, 1925. https://doi.org/10.3390/w16131925
Hua E, Song Y, Lu C, Xiang M, Wang T, Sun Q. Numerical Study on the Influence of Installation Height and Operating Frequency of Biomimetic Pumps on the Incipient Motion of Riverbed Sediment. Water. 2024; 16(13):1925. https://doi.org/10.3390/w16131925
Chicago/Turabian StyleHua, Ertian, Yabo Song, Caiju Lu, Mingwang Xiang, Tao Wang, and Qizong Sun. 2024. "Numerical Study on the Influence of Installation Height and Operating Frequency of Biomimetic Pumps on the Incipient Motion of Riverbed Sediment" Water 16, no. 13: 1925. https://doi.org/10.3390/w16131925
APA StyleHua, E., Song, Y., Lu, C., Xiang, M., Wang, T., & Sun, Q. (2024). Numerical Study on the Influence of Installation Height and Operating Frequency of Biomimetic Pumps on the Incipient Motion of Riverbed Sediment. Water, 16(13), 1925. https://doi.org/10.3390/w16131925