1. Introduction
Water systems are vulnerable to contamination accidents and bioterrorism attacks because they are relatively unprotected, accessible, and often isolated [
1]. The past decades have witnessed a mounting number of contaminant incidents in China. Unlike conventional pollution, contaminant accident emergency has involves uncertainty, urgency and the need for rapid response. Therefore, how to detect a potential contamination incident and identify a specific contaminant in a water source has raised concerns all over the world, especially after the events of 11 September 2001 in US.
One approach for avoiding or mitigating the impact of contamination is to establish an Early Warning System (EWS). EWS should provide a fast and accurate means of distinguishing between normal variations and contamination events [
2]. Ideally, it should be inexpensive, low maintenance, easy to integrate into network operations and reliable, with few false positives and negatives [
3].
A key part of an EWS is the detection module, which utilizes online sensors to evaluate water quality and detect the presence of contamination. Generally, there are two types of online water quality sensors. The first type refers to non-compound specific or conventional water quality sensors, which are normally used for routine water quality parameters, including pH, chlorine, total organic carbon (TOC), oxidation reduction potential (ORP), conductivity and temperature. The second type refers to compound specific water quality sensors or advanced sensors, which are capable of confirmative detection at low concentrations for a specific component [
4,
5,
6,
7,
8,
9].
Although compound specific sensors are capable of confirmative detection for contaminants at low concentration, the long analysis time and the high cost may represent disadvantages during a contaminant accident. In recent years, conventional quality sensors have played a growing role.
As summarized by McKenna
et al. [
10], two types of approaches to developing and testing event detection using water quality signals have been examined. First, laboratory and test-loop evaluation of sensors and associated event detection algorithms provides direct measurement of chemical changes in background water quality caused by specific contaminants [
11,
12,
13,
14]. For example, Hall
et al. [
11] reported a sensor response experiment for nine types of contaminants and realized that more than one sensor responded to each tested contaminant. After noticing this phenomenon, researchers have attempted to develop contaminant detection methods using responses from multiple sensors. Yang
et al. [
12] explored a real-time event adaptive detection, identification and warning (READiw) methodology in a drinking water pipe. The suggested adaptive transformation of sensory measurements reduced background noise and enhanced contaminant signals. In the method employed by Yang
et al., the relative value of concentrations of free and total chlorine, pH and ORP are used for contaminant classification. This allowed for contaminant detection and further classification based on chlorine kinetics. Kroll [
13] reported the Hach Homeland Security Technologies (HST) approach using multiple sensors for event detection and contaminant identification. In the Hach HST approach, signals from five separate orthogonal measurements of water quality (pH, conductivity, turbidity, chlorine residual, TOC) are processed from a five-paramater measure into a single scalar trigger signal. The deviation signal is then compared to a preset threshold level. If the signal exceeds the threshold, the trigger is activated [
13]. In Kroll’s method, although responses from multiple sensors are utilized, their internal relationship is not explored.
The second approach to event detection is based on signal processing and data driven techniques [
10,
15,
16,
17,
18,
19,
20]. For example, Hart
et al. [
15] reported a linear prediction filter (LPF). The LPF method predicts the water quality at a future time step and evaluates the residual between predicted and observed water quality values. Klise and McKenna [
16] developed an algorithm to classify the current measurement as normal or anomalous by calculating multivariate Euclidean distance (MED). The MED approach provides a measure of the distance between the sampled water quality and the previously measured samples contained in the history window. Allgeier
et al. [
17] and Raciti
et al. [
18] utilized artificial neural networks (ANN) and support vector machines (SVM) to classify water quality data into normal and anomalous classes after supervised learning training. Perelman
et al. [
19] and Arad
et al. [
20] reported a general framework that integrates a data-driven estimation model with sequential probability updating to detect quality faults in water distribution systems using multivariate water quality time series. A common feature of the methods mentioned above is that they are merely relying on data process. The physical characteristics of signals responding to contaminants are not considered in these methods. For online water quality sensors, fluctuations can be caused by equipment noise or presence of contaminant.
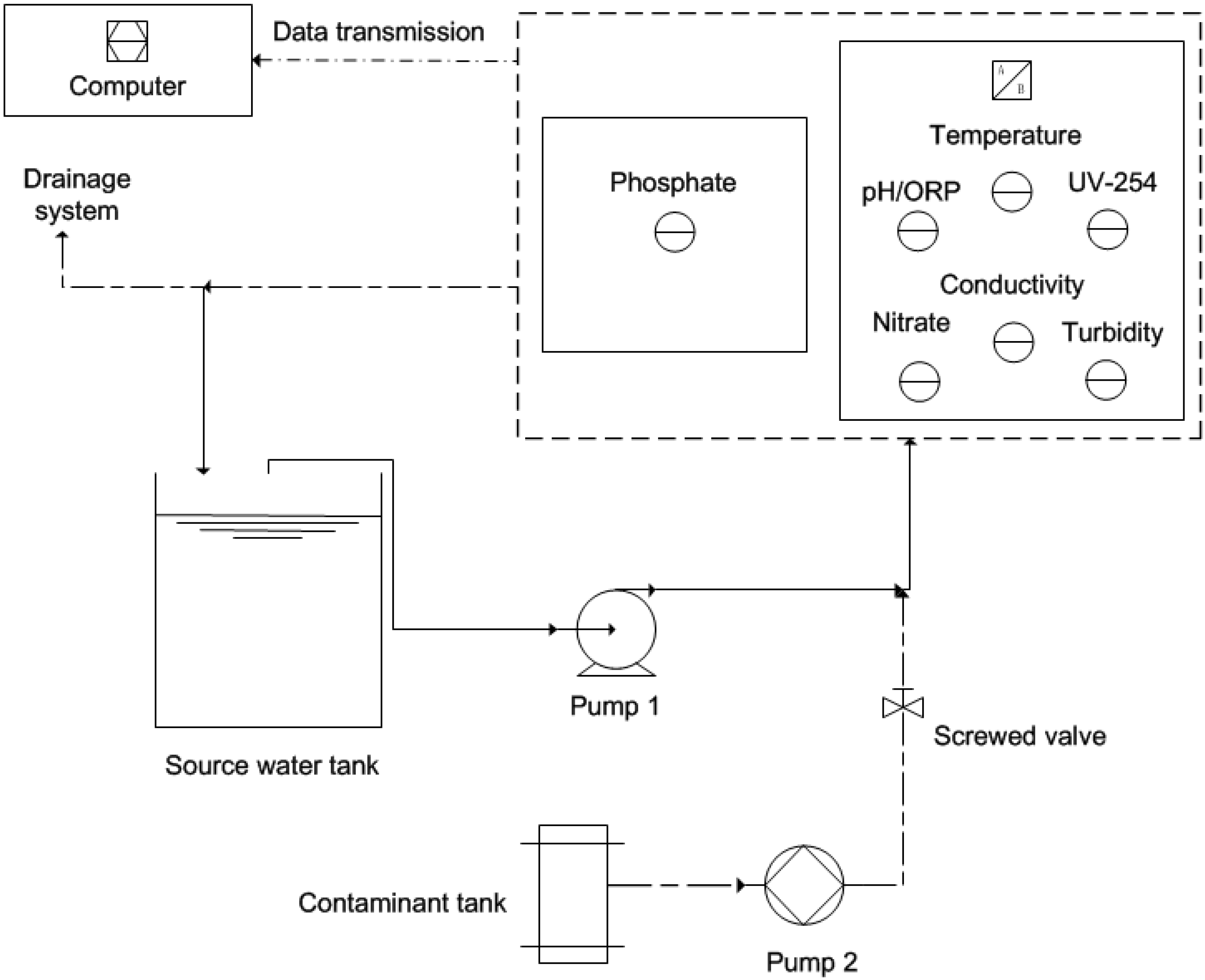
Liu
et al. [
21] proposed a method for real-time contamination detection using multiple conventional water quality sensors for source water. Eight sensors were used in the case study. In this paper, we aim to extend this research by determining how the number of sensors influences the detection performance and identifying the optimal combination of sensor deployment. The tested data are from contaminant dosing experiments in a laboratory.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





