Mapping Submerged Aquatic Vegetation Using RapidEye Satellite Data: The Example of Lake Kummerow (Germany)

 , , and
, , and
Abstract
:1. Introduction
2. Materials and Methods
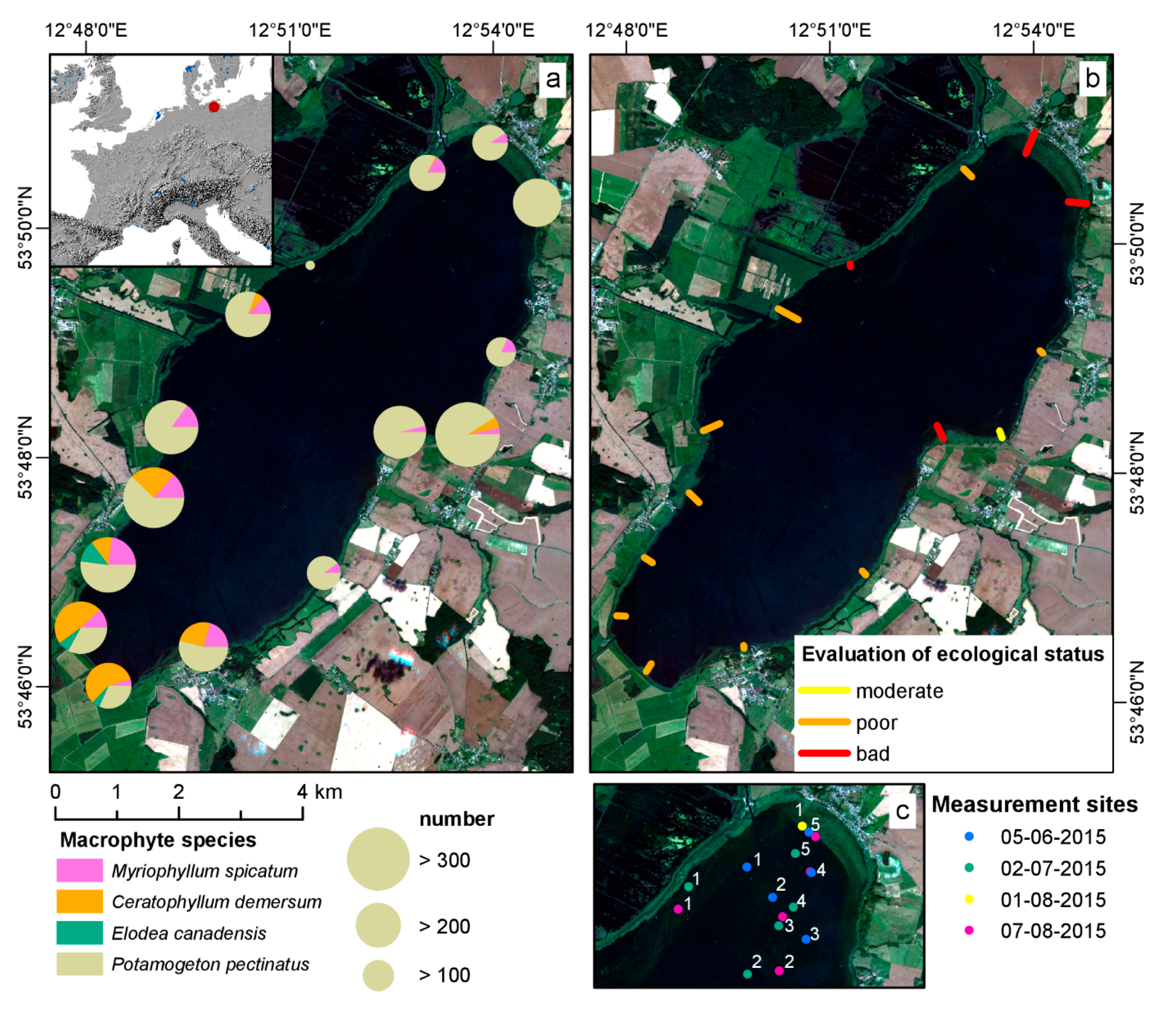
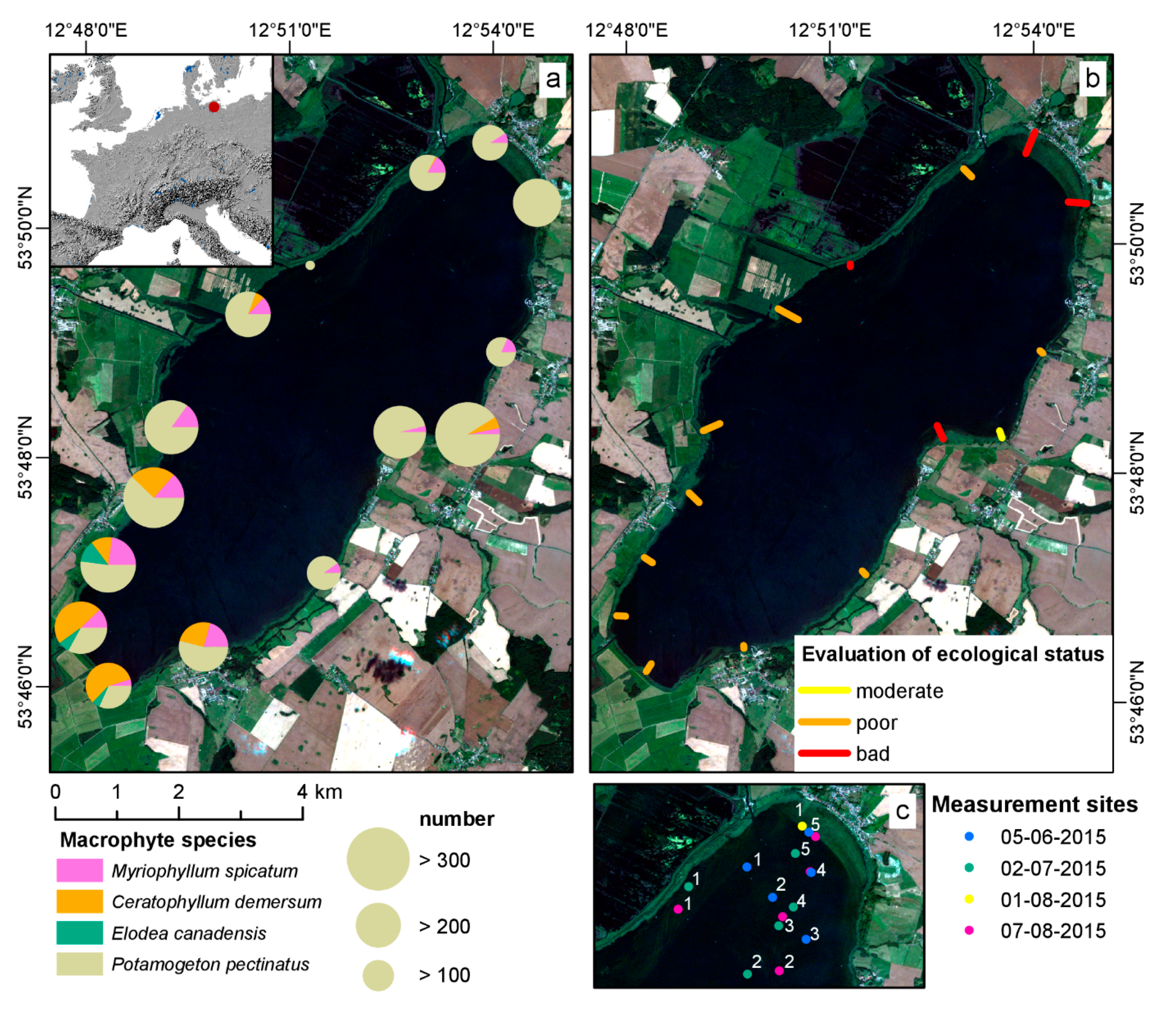
2.1. Study Site
2.2. Data Collection and Processing
2.3. RapidEye Data and Processing
2.4. Evaluation of SAV Mapping
3. Results
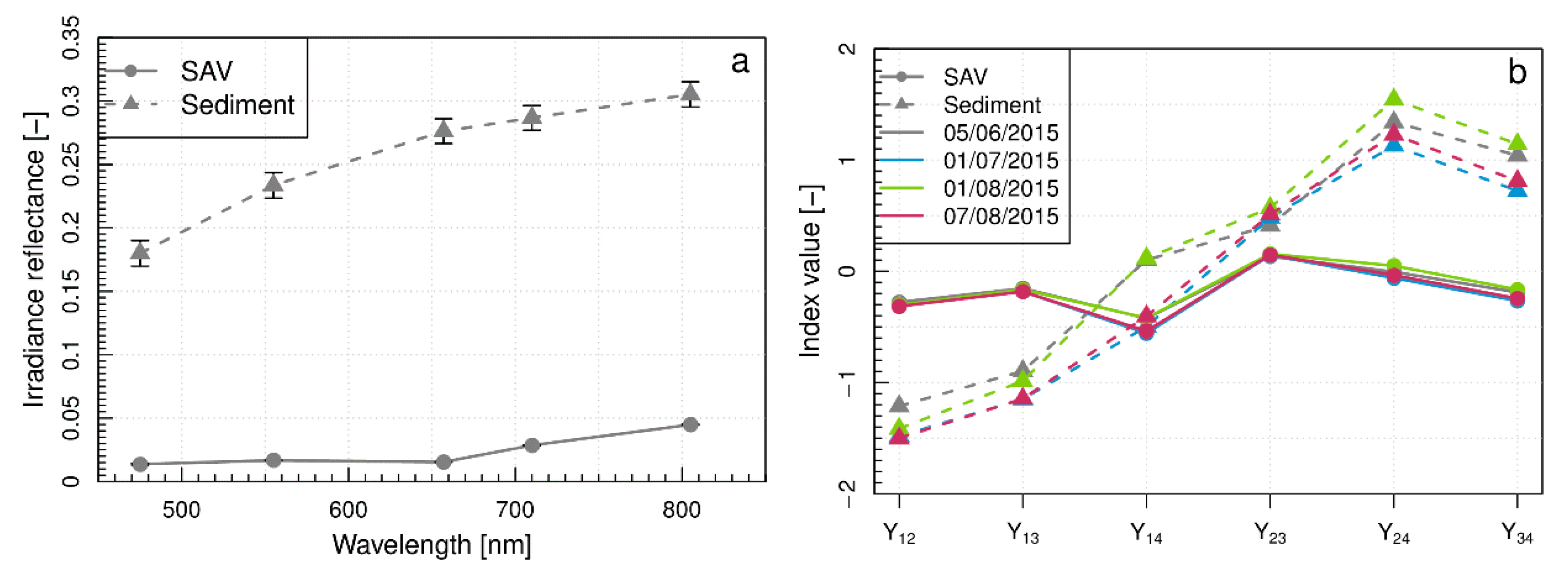
3.1. Differentiation of Littoral Bottom Coverage
3.2. Seasonal Changes of Littoral Bottom Coverage
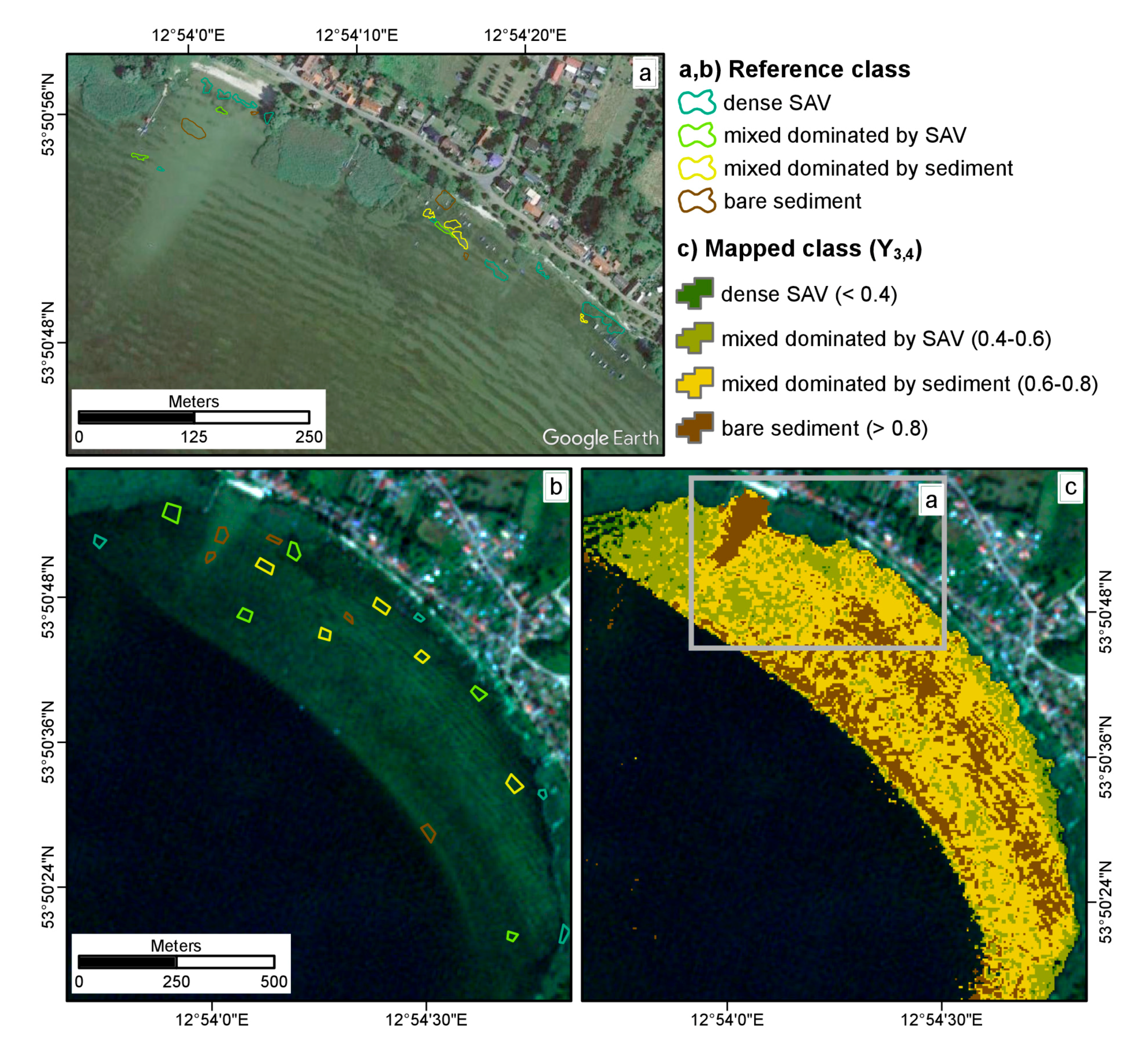
3.3. Evaluation of SAV Mapping
3.4. Atmospheric Correction
4. Discussion
4.1. Differentiation and Seasonal Changes of Littoral Bottom Coverage
4.2. Evaluation of SAV Mapping
4.3. Atmospheric Correction
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Melzer, A. Aquatic macrophytes as tools for lake management. Hydrobiologia 1999, 395, 181–190. [Google Scholar] [CrossRef]
- Penning, W.E.; Dudley, B.; Mjelde, M.; Hellsten, S.; Hanganu, J.; Kolada, A.; van den Berg, M.; Poikane, S.; Phillips, G.; Willby, N.; et al. Using aquatic macrophyte community indices to define the ecological status of European lakes. Aquat. Ecol. 2008, 42, 253–264. [Google Scholar] [CrossRef]
- Skubinna, J.P.; Coon, T.G.; Batterson, T.R. Increased abundance and depth of submersed macrophytes in response to decreased turbidity in Saginaw Bay, Lake Huron. J. Great Lakes Res. 1995, 21, 476–488. [Google Scholar] [CrossRef]
- Søndergaard, M.; Johansson, L.S.; Lauridsen, T.L.; Jørgensen, T.B.; Liboriussen, L.; Jeppesen, E. Submerged macrophytes as indicators of the ecological quality of lakes. Freshw. Biol. 2010, 55, 893–908. [Google Scholar] [CrossRef]
- Poikane, S.; Birk, S.; Böhmer, J.; Carvalho, L.; de Hoyos, C.; Gassner, H.; Hellsten, S.; Kelly, M.; Lyche Solheim, A.; Olin, M.; et al. A hitchhiker’s guide to European lake ecological assessment and intercalibration. Ecol. Indic. 2015, 52, 533–544. [Google Scholar] [CrossRef]
- Silva, T.S.F.; Costa, M.P.F.; Melack, J.M.; Novo, E.M.L.M. Remote sensing of aquatic vegetation: Theory and applications. Environ. Monit. Assess. 2008, 140, 131–145. [Google Scholar] [CrossRef] [PubMed]
- Short, F.T.; Neckles, H.A. The effects of global climate change on seagrasses. Aquat. Bot. 1999, 63, 169–196. [Google Scholar] [CrossRef]
- Rooney, N.; Kalff, J. Inter-annual variation in submerged macrophyte community biomass and distribution: The influence of temperature and lake morphometry. Aquat. Bot. 2000, 68, 321–335. [Google Scholar] [CrossRef]
- European Commission. The water framework directive (directive 2000/60/EC of the European Parliament and of the Council of 23 October 2000 establishing a framework for Community action in the field of water policy). Off. J. Eur. Commun. Bruss. Belg. 2000, 22, 1–72. [Google Scholar]
- Palmer, S.C.J.; Kutser, T.; Hunter, P.D. Remote sensing of inland waters: Challenges, progress and future directions. Remote Sens. Environ. 2015, 157, 1–8. [Google Scholar] [CrossRef]
- Dörnhöfer, K.; Oppelt, N. Remote sensing for lake research and monitoring-recent advances. Ecol. Indic. 2016, 64, 105–122. [Google Scholar] [CrossRef]
- George, D.G. The airborne remote sensing of phytoplankton chlorophyll in the lakes and tarns of the English Lake District. Int. J. Remote Sens. 1997, 18, 1961–1975. [Google Scholar] [CrossRef]
- Dekker, A.G.; Vos, R.J.; Peters, S.W.M. Analytical algorithms for lake water TSM estimation for retrospective analyses of TM and SPOT sensor data. Int. J. Remote Sens. 2002, 23, 15–35. [Google Scholar] [CrossRef]
- Malthus, T.J.; George, D.G. Airborne remote sensing of macrophytes in Cefni Reservoir, Anglesey, UK. Aquat. Bot. 1997, 58, 317–332. [Google Scholar] [CrossRef]
- Wolf, P.; Rößler, S.; Schneider, T.; Melzer, A. Collecting in situ remote sensing reflectances of submersed macrophytes to build up a spectral library for lake monitoring. Eur. J. Remote Sens. 2013, 46, 401–416. [Google Scholar] [CrossRef]
- Giardino, C.; Bartoli, M.; Candiani, G.; Bresciani, M.; Pellegrini, L. Recent changes in macrophyte colonisation patterns: An imaging spectrometry-based evaluation of southern Lake Garda (northern Italy). J. Appl. Remote Sens. 2007, 1, 011509–011517. [Google Scholar]
- Yuan, L.; Zhang, L.-Q. Mapping large-scale distribution of submerged aquatic vegetation coverage using remote sensing. Ecol. Inform. 2008, 3, 245–251. [Google Scholar] [CrossRef]
- Pinnel, N.; Heege, T.; Zimmermann, S. Spectral discrimination of submerged macrophytes in lakes using hyperspectral remote sensing data. SPIE Proc. Ocean Optics XVII 2004, 1, 1–16. [Google Scholar]
- Roessler, S.; Wolf, P.; Schneider, T.; Melzer, A. Multispectral remote sensing of invasive aquatic plants using RapidEye. In Earth Observation of Global Changes (EOGC); Krisp, J.M., Meng, L., Pail, R., Stilla, U., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 109–123. [Google Scholar]
- Malthus, T.J.; Karpouzli, E. Integrating field and high spatial resolution satellite-based methods for monitoring shallow submersed aquatic habitats in the Sound of Eriskay, Scotland, UK. Int. J. Remote Sens. 2003, 24, 2585–2593. [Google Scholar] [CrossRef]
- Williams, D.J.; Rybicki, N.B.; Lombana, A.V.; O’Brien, T.M.; Gomez, R.B. Preliminary investigation of submerged aquatic vegetation mapping using hyperspectral remote sensing. Environ. Monit. Assess. 2003, 81, 383–392. [Google Scholar] [CrossRef]
- Fyfe, S. Spatial and temporal variation in spectral reflectance: Are seagrass species spectrally distinct? Limnol. Oceanogr. 2003, 48, 464–479. [Google Scholar] [CrossRef]
- Armstrong, R.A. Remote sensing of submerged vegetation canopies for biomass estimation. Int. J. Remote Sens. 1993, 14, 621–627. [Google Scholar] [CrossRef]
- Gausman, H.W. Evaluation of factors causing reflectance differences between sun and shade leaves. Remote Sens. Environ. 1984, 15, 177–181. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Zur, Y.; Chivkunova, O.B.; Merzlyak, M.N. Assessing carotenoid content in plant leaves with reflectance spectroscopy. Photochem. Photobiol. 2002, 75, 272–281. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.; Hedley, J.; Klonowski, W.; Lee, Z.P. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef]
- Giardino, C.; Bresciani, M.; Valentini, E.; Gasperini, L.; Bolpagni, R.; Brando, V.E. Airborne hyperspectral data to assess suspended particulate matter and aquatic vegetation in a shallow and turbid lake. Remote Sens. Environ. 2015, 157, 48–57. [Google Scholar] [CrossRef]
- Heege, T.; Bogner, A.; Pinnel, N. Mapping of Submerged Aquatic Vegetation with a Physically Based Processing Chain; Kramer, E., Ed.; SPIE-The International Society for Optical Engineering: Barcelona, Spain, 2003; pp. 43–50. [Google Scholar]
- Richter, R.; Schläpfer, D. Atmospheric/Topographic Correction for Satellite Imagery: Atcor-2/3 User Guide, Version 9.1.0, dlr/rese, wessling, dlr-ib 565-01/16. October 2016. Available online: http://www.Rese-apps.Com/pdf/atcor3_manual.pdf (accessed on 30 November 2016).
- Gege, P. A case study at starnberger see for hyperspectral bathymetry mapping using inverse modeling. In Proceedings of the WHISPERS 2014, Lausanne, Switzerland, 25–27 July 2014; pp. 1–4. [Google Scholar]
- Villa, P.; Bresciani, M.; Bolpagni, R.; Pinardi, M.; Giardino, C. A rule-based approach for mapping macrophyte communities using multi-temporal aquatic vegetation indices. Remote Sens. Environ. 2015, 171, 218–233. [Google Scholar] [CrossRef]
- Giardino, C.; Candiani, G.; Bresciani, M.; Lee, Z.; Gagliano, S.; Pepe, M. Bomber: A tool for estimating water quality and bottom properties from remote sensing images. Comput. Geosci. 2012, 45, 313–318. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef] [PubMed]
- Gege, P. WASI-2D: A software tool for regionally optimized analysis of imaging spectrometer data from deep and shallow waters. Comput. Geosci. 2013, 62, 208–215. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Manessa, M.D.M.; Kanno, A.; Sekine, M.; Ampou, E.E.; Widagti, N.; As-syakur, A.R. Shallow-water benthic identification using multispectral satellite imagery: Investigation on the effects of improving noise correction method and spectral cover. Rem. Sens. 2014, 6, 4454–4472. [Google Scholar] [CrossRef]
- Ciraolo, G.; Cox, E.; La Loggia, G.; Maltese, A. The classification of submerged vegetation using hyperspectral MIVIS data. Ann. Geophys. 2006, 49, 287–294. [Google Scholar]
- Brooks, C.; Grimm, A.; Shuchman, R.; Sayers, M.; Jessee, N. A satellite-based multi-temporal assessment of the extent of nuisance Cladophora and related submerged aquatic vegetation for the Laurentian Great Lakes. Remote Sens. Environ. 2015, 157, 58–71. [Google Scholar] [CrossRef]
- Shuchman, R.A.; Sayers, M.J.; Brooks, C.N. Mapping and monitoring the extent of submerged aquatic vegetation in the Laurentian Great Lakes with multi-scale satellite remote sensing. J. Great Lakes Res. 2013, 39, 78–89. [Google Scholar] [CrossRef]
- Wöbbecke, K.; Klett, G.; Rechenberg, B. Wasserbeschaffenheit der Wichtigsten seen in der Bundesrepublik Deutschland: Datensammlung 1981–2000; Umweltbundesamt: Dessau-Roßlau, Germany, 2003. [Google Scholar]
- LU-MV. Investigation of Macrophytes in Selected Lakes Mecklenburg-Western Pomerania in the Year 2013 (Data Set). Lake Kummerow (200010). MLUV-MV 2015. Data Set Request at MLUV-MV. Available online: http://www.regierung-mv.de/Landesregierung/lm/Umwelt/Wasser/ (accessed on 11 July 2017).
- Schaumburg, J.; Schranz, C.; Stelzer, D. Bewertung von Seen mit Makrophyten & Phytobenthos gemäß EG-WRRL–Anpassung des Verfahrens für Natürliche und Künstliche Gewässer sowie Unterstützung der Interkalibrierung; Bayerisches Landesamt für Umwelt: Augsburg/Wielenbach, Germany, 2011. [Google Scholar]
- TriOS. Ramses Radiometer. Available online: http://www.Trios.De/en/products/sensors/ramses.Html (accessed on 29 November 2016).
- Trimble. Datasheet. Trimble Juno SD Handheld GPS Device. Available online: http://trl.Trimble.Com/docushare/dsweb/get/document-504948/022501-244b_juno%20sd_ds_0712_mgis_hr_nc.Pdf (accessed on 30 November 2016).
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Maritorena, S. Remote sensing of the water attenuation in coral reefs: A case study in French Polynesia. Int. J. Remote Sens. 1996, 17, 155–166. [Google Scholar] [CrossRef]
- Richter, R. Correction of atmospheric and topographic effects for high spatial resolution satellite imagery. Int. J. Remote Sens. 1997, 18, 1099–1111. [Google Scholar] [CrossRef]
- Mobley, C.D.; Boss, E.; Roesler, C. Ocean Optics Web Book. 2015. Available online: http://www.oceanopticsbook.info/ (accessed on 10 July 2017).
- Kaufman, Y.; Tanré, D.; Gordon, H.; Nakajima, T.; Lenoble, J.; Frouin, R.; Grassl, H.; Herman, B.; King, M.; Teillet, P. Passive remote sensing of tropospheric aerosol and atmospheric correction for the aerosol effect. J. Geophysis. Res-Atmos. 1997, 102, 16815–16830. [Google Scholar] [CrossRef]
- Levy, R.; Hsu, C. MODIS Atmosphere L2 Aerosol Product (MYD04_L2). NASA MODIS Adaptive Processing System, Goddard Space Flight Center, USA. 2015a. Available online: http://dx.doi.org/10.5067/MODIS/MYD04_L2.006 (accessed on 10 July 2017).
- Levy, R.; Hsu, C. MODIS Atmosphere L2 Aerosol Product (MOD04_L2). NASA MODIS Adaptive Processing System, Goddard Space Flight Center, USA. 2015b. Available online: http://dx.doi.org/10.5067/MODIS/MOD04_L2.006 (accessed on 10 July 2017).
- Zambrano-Bigiarini, M. Hydrogof: Goodness-of-fit Functions for Comparison of Simulated and Observed Hydrological: R Package Version 0.3-8. Available online: https://cran.r-project.org/web/packages/hydroGOF/index.html (accessed on 10 July 2017).
- Spitzer, D.; Dirks, R.W.J. Bottom influence on the reflectance of the sea. Int. J. Remote Sens. 1987, 8, 279–308. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Kirk, J.T. Light and Photosynthesis in Aquatic Ecosystems; Cambridge University Press: Cambridge, UK, 1994. [Google Scholar]
- Koch, E.W. Beyond light: Physical, geological, and geochemical parameters as possible submersed aquatic vegetation habitat requirements. Estuaries 2001, 24, 1–17. [Google Scholar] [CrossRef]
- Dörnhöfer, K.; Klinger, P.; Heege, T.; Oppelt, N. Multi-sensor satellite and in situ monitoring of phytoplankton development in a eutrophic-mesotrophic lake. Sci. Total Environ. In review.
- Heblinski, J.; Schmieder, K.; Heege, T.; Agyemang, T.K.; Sayadyan, H.; Vardanyan, L. High-resolution satellite remote sensing of littoral vegetation of Lake Sevan (Armenia) as a basis for monitoring and assessment. Hydrobiologia 2011, 661, 97–111. [Google Scholar] [CrossRef]
- Hunter, P.D.; Gilvear, D.J.; Tyler, A.N.; Willby, N.J.; Kelly, A. Mapping macrophytic vegetation in shallow lakes using the Compact Airborne Spectrographic Imager (CASI). Aquat. Conserv. Mar. Freshw. Ecosyst. 2010, 20, 717–727. [Google Scholar] [CrossRef]
- Dogan, O.K.; Akyurek, Z.; Beklioglu, M. Identification and mapping of submerged plants in a shallow lake using quickbird satellite data. J. Environ. Manag. 2009, 90, 2138–2143. [Google Scholar] [CrossRef] [PubMed]
- Bolpagni, R.; Bresciani, M.; Laini, A.; Pinardi, M.; Matta, E.; Ampe, E.M.; Giardino, C.; Viaroli, P.; Bartoli, M. Remote sensing of phytoplankton-macrophyte coexistence in shallow hypereutrophic fluvial lakes. Hydrobiologia 2014, 737, 67–76. [Google Scholar] [CrossRef]
- Wang, P.; Huang, C.; Brown de Colstoun, E.C. Mapping 2000–2010 impervious surface change in India using global land survey landsat data. Remote Sens. 2017, 9, 366. [Google Scholar] [CrossRef]
- Manakos, I.; Karakizi, C.; Gkinis, I.; Karantzalos, K. Validation and inter-comparison of spaceborne derived global and continental land cover products for the Mediterranean region: The case of Thessaly. Land 2017, 6, 34. [Google Scholar] [CrossRef]
- Bey, A.; Sánchez-Paus Díaz, A.; Maniatis, D.; Marchi, G.; Mollicone, D.; Ricci, S.; Bastin, J.-F.; Moore, R.; Federici, S.; Rezende, M. Collect earth: Land use and land cover assessment through augmented visual interpretation. Remote Sens. 2016, 8, 807. [Google Scholar] [CrossRef]
- Smith, G.M.; Milton, E.J. The use of the empirical line method to calibrate remotely sensed data to reflectance. Int. J. Remote Sens. 1999, 20, 2653–2662. [Google Scholar] [CrossRef]
- Sterckx, S.; Knaeps, E.; Ruddick, K. Detection and correction of adjacency effects in hyperspectral airborne data of coastal and inland waters: The use of the near infrared similarity spectrum. Int. J. Remote Sens. 2011, 32, 6479–6505. [Google Scholar] [CrossRef]
- Santer, R.; Schmechtig, C. Adjacency effects on water surfaces: Primary scattering approximation and sensitivity study. Appl. Opt. 2000, 39, 361–375. [Google Scholar] [CrossRef] [PubMed]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun glint correction of high and low spatial resolution images of aquatic scenes: A review of methods for visible and near-infrared wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Date | Acquisition Time (UTC) | Satellite | Wind Direction [°] | Wind Speed [m s−1] | Solar Zenith [°] | Viewing Angle [°] | Aerosol Model | Calculated visibility [km] | In situ Data |
|---|---|---|---|---|---|---|---|---|---|
| 12 June 2015 | 10:53 | RE-3 | 50–80 | 2–3 | 30.6 | 12.9 | Maritime mid-latitude summer | 45.6 | −7 days |
| 1 July 2015 | 10:52 | RE-3 | 40–70 | 2–3 | 30.7 | 14.8 | Maritime mid-latitude summer | 111.7 | +1 day |
| 1 August 2015 | 11:03 | RE-5 | 60 | 2–5 | 35.7 | 2.9 | Maritime mid-latitude summer | 88.9 | +3 h |
| 7 August 2015 | 11:11 | RE-1 | 290–350 | 1–6 | 37.2 | 6.7 | Maritime mid-latitude summer | 25.1 | ±2 h |
| RapidEye Acquisition Date | In situ Data Collection | RAMSES Measurement Points | Secchi Depth [m] | SPM [g·m−3] | Chl-a [mg·m−3] | acDOM(440) [m−1] |
|---|---|---|---|---|---|---|
| 12 June 2015 | 5 June 2015 | 3 | 3.8 ± 0.3 | 0.7 ± 0.6 | 1.4 ± 0.3 | 1.38 ± 0.05 |
| 1 July 2015 | 2 July 2015 | 5 | 2.3 ± 0.7 | 1.3 ± 1.2 | 11.6 ± 4.1 | 1.28 ± 0.06 |
| 1 August 2015 | 1 August 2015 | 1 | No measurement | 0.7 ± 0.3 | 1.7 ± 1.8 | 1.28 ± 0.00 |
| 7 August 2015 | 7 August 2015 | 4 | 1.8 ± 0.5 | 3.6 ± 0.5 | 16.7 ± 2.9 | 1.27 ± 0.11 |
| Class | Reference Data (Number of Pixels) | User’s Accuracy [%] | |||||
|---|---|---|---|---|---|---|---|
| Dense SAV | Mixed SAV Dominated | Mixed Sediment Dominated | Pure Sediment | Sum | |||
| Depth-invariant index data [number of pixels] | dense SAV | 26 | 9 | 0 | 0 | 35 | 74.3 |
| mixed SAV dominated | 19 | 106 | 19 | 1 | 145 | 73.1 | |
| mixed Sediment dominated | 3 | 48 | 113 | 8 | 172 | 65.7 | |
| pure sediment | 0 | 1 | 25 | 101 | 127 | 79.5 | |
| Sum | 48 | 164 | 157 | 110 | 479 | ||
| Producer’s accuracy [%] | 54.2 | 64.6 | 72.0 | 91.8 | |||
| masked | 43 | 4 | 0 | 0 | 47 | ||
| RapidEye Acquisition Date | In situ Data Acquisition Date | Measurement Site | RMSE [sr−1] | r [-] | Percentage Bias [%] |
|---|---|---|---|---|---|
| 1 July 2015 | 2 July 2015 | 1 | 0.0017 | 0.82 | −32.2 |
| 1 July 2015 | 2 July 2015 | 2 | 0.0013 | 0.64 | 59.4 |
| 1 July 2015 | 2 July 2015 | 3 | 0.0006 | 0.81 | 3.8 |
| 1 July 2015 | 2 July 2015 | 4 | 0.0007 | 0.74 | 4.6 |
| 1 July 2015 | 2 July 2015 | 5 | 0.0007 | 0.74 | 0.6 |
| 1 August 2015 | 1 August 2015 | 1 | 0.0023 | 0.88 | −19.8 |
| 7 August 2015 | 7 August 2015 | 1 | 0.0067 | 0.68 | 281.1 |
| 7 August 2015 | 7 August 2015 | 2 | 0.0050 | 0.58 | 87.7 |
| 7 August 2015 | 7 August 2015 | 3 | 0.0071 | 0.52 | 252.2 |
| 7 August 2015 | 7 August 2015 | 4 | 0.0058 | 0.71 | 187.3 |
| 7 August 2015 | 7 August 2015 | 5 | 0.0026 | 0.95 | 27.7 |
| Date | MODIS Acquisition Time (UTC) | AOT MODIS | RapidEye Acquisition Time (UTC) | AOT ATCOR2 | RMSE [-] | Percentage Bias [%] | r [-] |
|---|---|---|---|---|---|---|---|
| 12 June 2015 | TE 10:25 | 0.119 ± 0.037 | 10:53 | 0.181 ± 0.005 | 0.072 | −13.5 | 0.94 |
| 12 June 2015 | AQ 12:10 | 0.174 ± 0.043 | 10:53 | 0.181 ± 0.005 | |||
| 1 July 2015 | TE 9:15 | 0.127 ± 0.019 | 10:52 | 0.116 ± 0.009 | |||
| 1 August 2015 | AQ 12:00 | 0.119 ± 0.048 | 11:03 | 0.102 ± 0.002 | |||
| 7 August 2015 | TE 11:15 | 0.390 ± 0.017 | 11:11 | 0.301 ± 0.003 | |||
| 7 August 2015 | AQ 13:00 | 0.437 ± 0.045 | 11:11 | 0.301 ± 0.003 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fritz, C.; Dörnhöfer, K.; Schneider, T.; Geist, J.; Oppelt, N. Mapping Submerged Aquatic Vegetation Using RapidEye Satellite Data: The Example of Lake Kummerow (Germany). Water 2017, 9, 510. https://doi.org/10.3390/w9070510
Fritz C, Dörnhöfer K, Schneider T, Geist J, Oppelt N. Mapping Submerged Aquatic Vegetation Using RapidEye Satellite Data: The Example of Lake Kummerow (Germany). Water. 2017; 9(7):510. https://doi.org/10.3390/w9070510
Chicago/Turabian StyleFritz, Christine, Katja Dörnhöfer, Thomas Schneider, Juergen Geist, and Natascha Oppelt. 2017. "Mapping Submerged Aquatic Vegetation Using RapidEye Satellite Data: The Example of Lake Kummerow (Germany)" Water 9, no. 7: 510. https://doi.org/10.3390/w9070510
APA StyleFritz, C., Dörnhöfer, K., Schneider, T., Geist, J., & Oppelt, N. (2017). Mapping Submerged Aquatic Vegetation Using RapidEye Satellite Data: The Example of Lake Kummerow (Germany). Water, 9(7), 510. https://doi.org/10.3390/w9070510