
Accuracy of Determination of Corresponding Points from Available Providers of Spatial Data—A Case Study from Slovakia


Abstract
1. Introduction
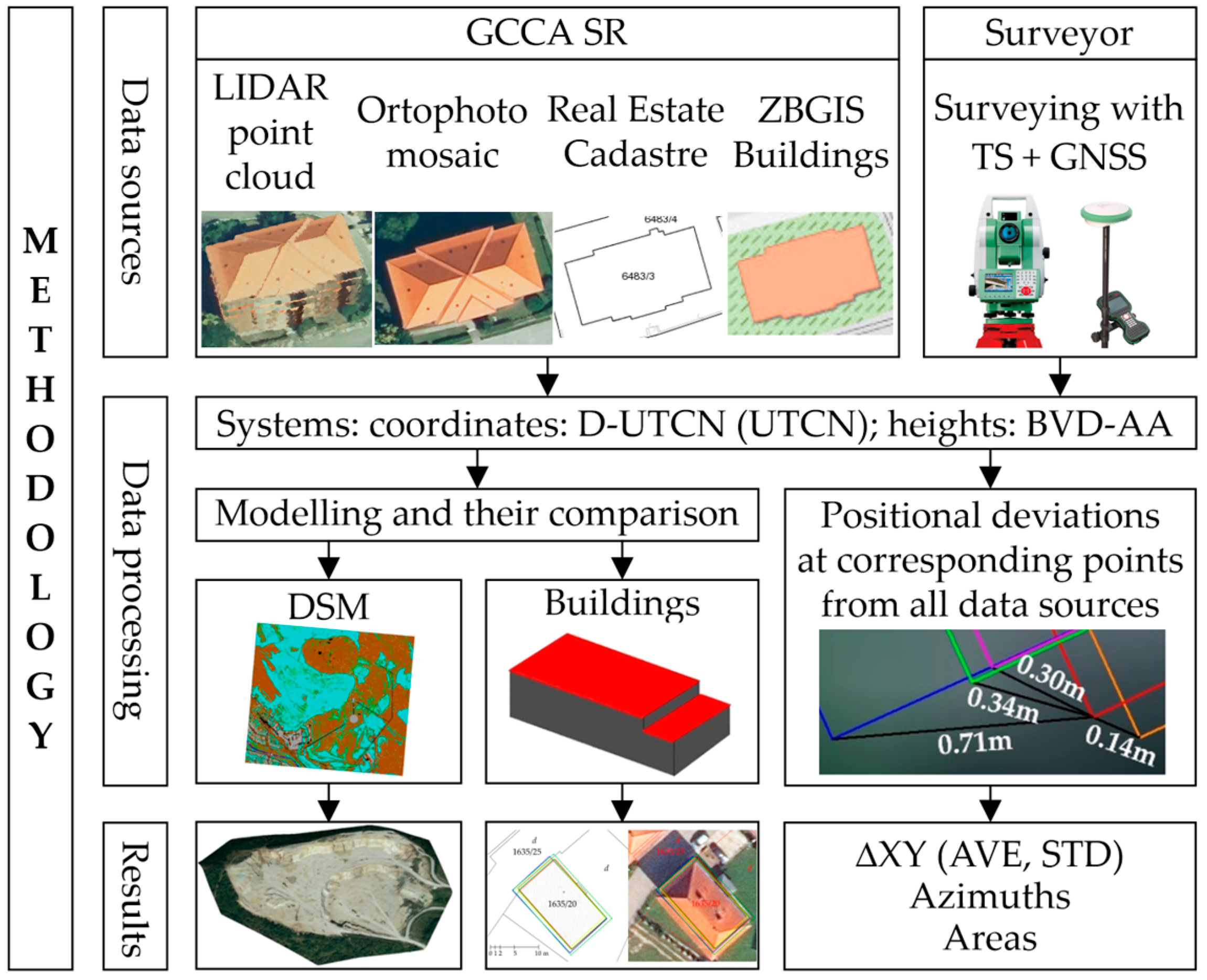
2. Materials and Methods
2.1. Study Area
2.2. Data Collection
2.3. Level of Detail for Building Modeling, a Transformation of Implementation Coordinate Systems, and Digital Elevation Models
3. Results
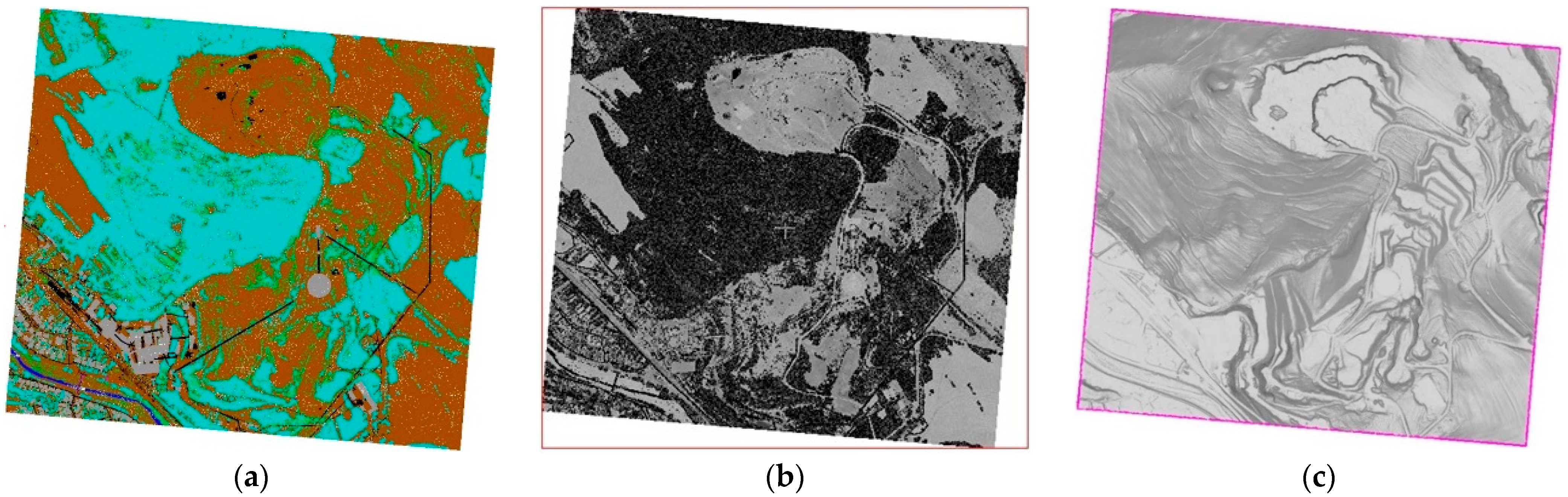
3.1. Modeling of the Area of Interest
3.2. Open Pit Mine Modeling and Data Analysis
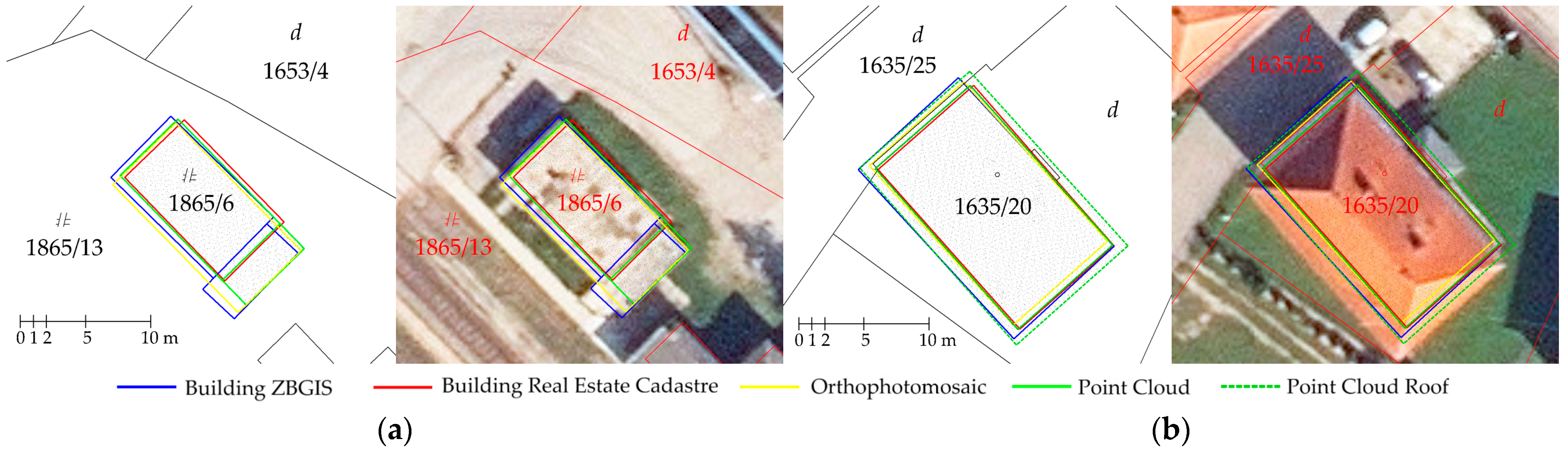
3.3. Simple Non-Automated 3D Modeling of Buildings for Various Studies
3.3.1. Warehouse Building with a Flat Roof and No Edges
3.3.2. Apartment Building with a Hipped Roof
3.3.3. Analysis of the Location of the Modeled Buildings
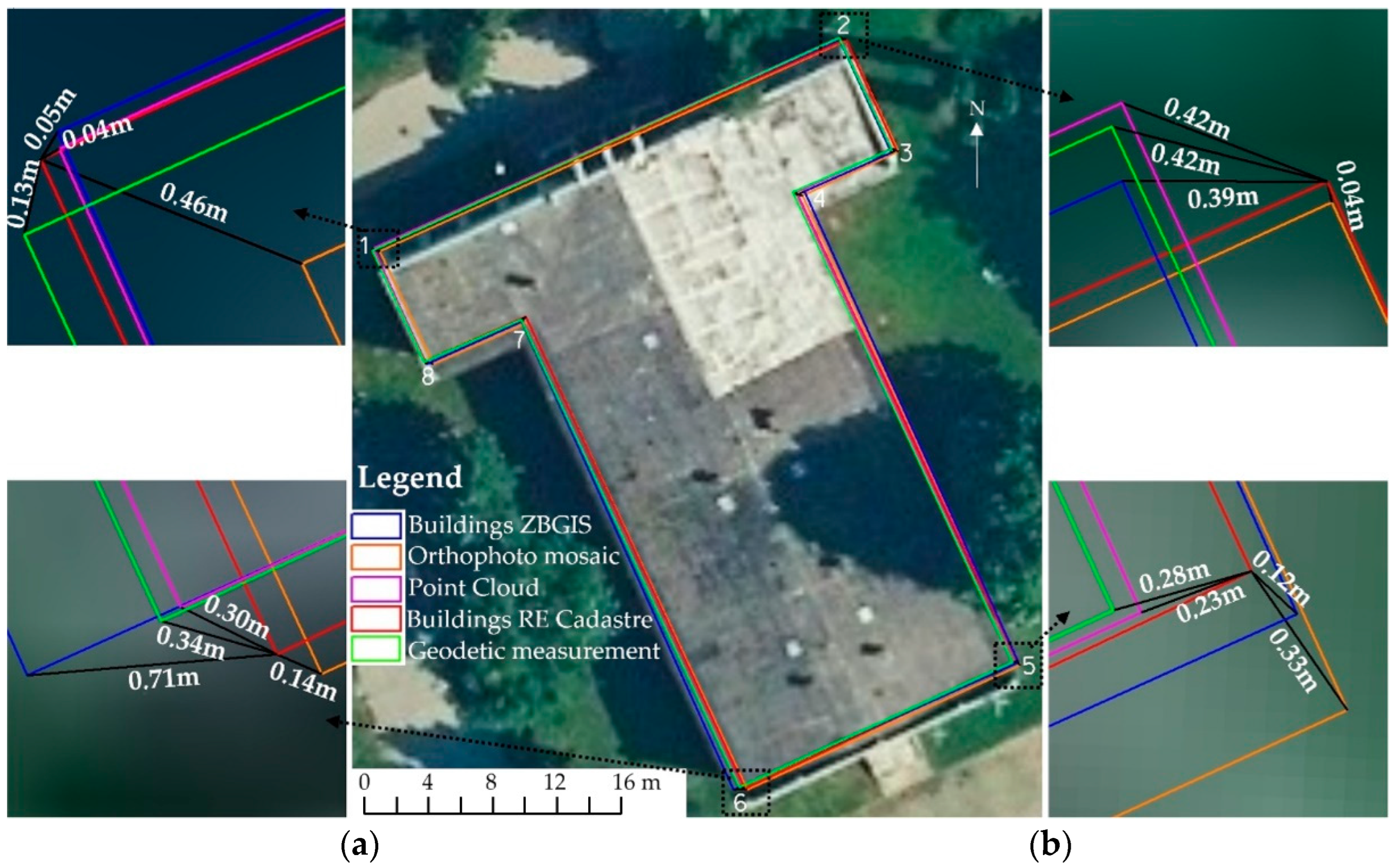
3.4. Detailed Determination of Positional Deviations on Corresponding Points
3.5. Determination of Positional Deviations of Buildings
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weiss, G.; Weiss, E.; Weiss, R.; Labant, S.; Bartoš, K. Survey Control Points: Compatibility and Verification, 1st ed.; Springer International Publishing: Cham, Switzerland, 2016; 118p. [Google Scholar] [CrossRef]
- Weiss, G.; Gašinec, J. The compatibility investigation of 2D geodetic points by using the GPS technology. Acta Montan. Slovaca 2005, 10, 2. Available online: https://actamont.tuke.sk/pdf/2005/n2/28weiss.pdf (accessed on 3 August 2023).
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Pacina, J.; Brejcha, M. Digital Terrain Models, 1st ed.; Univerzita J. E. Purkyně v Ústí nad Labem: Ústí nad Labem, Czech Republic, 2014; 73p. [Google Scholar]
- Data Collection for GIS. Available online: http://www.pce.sk/clanky/body_zbor98_2.htm (accessed on 5 May 2022).
- Bruggisser, M.; Hollaus, M.; Wang, D.; Pfeifer, N.; Bruggisser, M.; Hollaus, M.; Wang, D.; Pfeifer, N. Adaptive Framework for the Delineation of Homogeneous Forest Areas Based on LiDAR Points. Remote Sens. 2019, 11, 189. [Google Scholar] [CrossRef]
- Roces-Díaz, J.V.; Cabo, C.; Prendes, C.; Ordoñez, C.; Santín, C. Automatic delineation of forest patches in highly fragmented landscapes using coloured point clouds. Forests 2020, 11, 198. [Google Scholar] [CrossRef]
- Palecek, V.; Kubicek, P. Assessment of Accuracy in the Identification of Rock Formations from Aerial and Terrestrial LaserScanning Data. ISPRS Int. J. Geo-Inf. 2018, 7, 142. [Google Scholar] [CrossRef]
- Niwa, H.; Ise, H.; Kamada, M. Suitable LiDAR Platform for Measuring the 3D Structure of Mangrove Forests. Remote Sens. 2023, 15, 1033. [Google Scholar] [CrossRef]
- Splinter, K.; Harley, M.; Turner, I. Remote sensing is changing our view of the coast: Insights from 40 years of monitoring at Narrabeen-Collaroy, Australia. Remote Sens. 2018, 10, 1744. [Google Scholar] [CrossRef]
- Wang, J.; Wang, L.; Feng, S.; Peng, B.; Huang, L.; Fatholahi, S.N.; Tang, L.; Li, J. An Overview of Shoreline Mapping by Using Airborne LiDAR. Remote Sens. 2023, 15, 253. [Google Scholar] [CrossRef]
- Julin, A.; Kurkela, M.; Rantanen, T.; Virtanen, J.P.; Maksimainen, M.; Kukko, A.; Kaartinen, H.; Vaaja, M.T.; Hyyppä, J.; Hyyppä, H. Evaluating the quality of TLS point cloud colorization. Remote Sens. 2020, 12, 2748. [Google Scholar] [CrossRef]
- Schmitz, B.; Holst, C.; Medic, T.; Lichti, D.; Kuhlmann, H. How to Efficiently Determine the Range Precision of 3D Terrestrial Laser Scanners. Sensors 2019, 19, 1466. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Q.; Li, J.; Zhang, D.; Yu, J.; Yin, Y.; Lv, S.; Liang, A. IMU-Aided Registration of MLS Point Clouds Using Inertial Trajectory Error Model and Least Squares Optimization. Remote Sens. 2022, 14, 1365. [Google Scholar] [CrossRef]
- Abayowa, B.O.; Yilmaz, A.; Hardie, R.C. Automatic registration of optical aerial imagery to a LiDAR point cloud for generation of city models. ISPRS J. Photogramm. Remote Sens. 2015, 106, 68–81. [Google Scholar] [CrossRef]
- Bieda, A.; Bydłosz, J.; Warchoł, A.; Balawejder, M. Historical Underground Structures as 3D Cadastral Objects. Remote Sens. 2020, 12, 1547. [Google Scholar] [CrossRef]
- Nahon, A.; Molina, P.; Blázquez, M.; Simeon, J.; Capo, S.; Ferrero, C. Corridor Mapping of Sandy Coastal Foredunes with UAS Photogrammetry and Mobile Laser Scanning. Remote Sens. 2019, 11, 1352. [Google Scholar] [CrossRef]
- Luethje, F.; Kranz, O.; Schoepfer, E. Geographic Object-Based Image Analysis Using Optical Satellite Imagery and GIS Data for the Detection of Mining Sites in the Democratic Republic of Congo. Remote Sens. 2014, 6, 6636–6661. [Google Scholar] [CrossRef]
- Kudela, P.; Palčák, M. Photogrammetry as a tool for digitizing small objects. Ikaros 2019, 23, 4. Available online: http://ikaros.cz/node/18987 (accessed on 27 November 2022).
- Šafář, V.; Potůčková, M.; Karas, J.; Tlustý, J.; Štefanová, E.; Jančovič, M.; Cígler Žofková, D. The Use of UAV in Cadastral Mapping of the Czech Republic. ISPRS Int. J. Geo-Inf. 2021, 10, 380. [Google Scholar] [CrossRef]
- Moyano, J.; Nieto-Julián, J.E.; Antón, D.; Cabrera, E.; Bienvenido-Huertas, D.; Sánchez, N. Suitability Study of Structure-from-Motion for the Digitisation of Architectural (Heritage) Spaces to Apply Divergent Photograph Collection. Symmetry 2020, 12, 1981. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Skarlatos, D.; Georgopoulos, A.; Karantzalos, K. DepthLearn: Learning to Correct the Refraction on Point Clouds Derived from Aerial Imagery for Accurate Dense Shallow Water Bathymetry Based on SVMs-Fusion with LiDAR Point Clouds. Remote Sens. 2019, 11, 2225. [Google Scholar] [CrossRef]
- Rogers, S.R.; Manning, I.; Livingstone, W. Comparing the Spatial Accuracy of Digital Surface Models from Four Unoccupied Aerial Systems: Photogrammetry Versus LiDAR. Remote Sens. 2020, 12, 2806. [Google Scholar] [CrossRef]
- Marčiš, M. Automated Photogrammetric Methods in Digitizing Cultural Heritage, 1st ed.; Slovak Technical University: Bratislava, Slovakia, 2019; 112p. [Google Scholar]
- Salagean-Mohora, I.; Anghel, A.A.; Frigura-Iliasa, F.M. Photogrammetry as a Digital Tool for Joining Heritage Documentation in Architectural Education and Professional Practice. Buildings 2023, 13, 319. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, J.; Zhu, Y.; Chen, Q.; Liang, X. Systematické hodnotenie a optimalizácia náklonovej fotogrammetrie bezpilotných leteckých dopravných prostriedkov na základe procesu analytickej hierarchie. Appl. Sci. 2022, 12, 7665. [Google Scholar] [CrossRef]
- Diaz, N.D.; Highfield, W.E.; Brody, S.D.; Fortenberry, B.R. Deriving First Floor Elevations within Residential Communities Located in Galveston Using UAS Based Data. Drones 2022, 6, 81. [Google Scholar] [CrossRef]
- Žabota, B.; Kobal, M. Accuracy Assessment of UAV-Photogrammetric-Derived Products Using PPK and GCPs in Challenging Terrains: In Search of Optimized Rockfall Mapping. Remote Sens. 2021, 13, 3812. [Google Scholar] [CrossRef]
- Elhashash, M.; Albanwan, H.; Qin, R. A Review of Mobile Mapping Systems: From Sensors to Applications. Sensors 2022, 22, 4262. [Google Scholar] [CrossRef] [PubMed]
- Roberts, J.; Koeser, A.; Abd-Elrahman, A.; Wilkinson, B.; Hansen, G.; Landry, S.; Perez, A. Mobile Terrestrial Photogrammetry for Street Tree Mapping and Measurements. Forests 2019, 10, 701. [Google Scholar] [CrossRef]
- Airborne Laser Scanning and DTM 5.0. Available online: https://www.geoportal.sk/en/zbgis/als_dmr/ (accessed on 27 January 2023).
- Orthophotomosaic of Slovakia. Available online: https://www.geoportal.sk/en/zbgis/orthophotomosaic/ (accessed on 27 January 2023).
- ISO 19111:2007; International Technical Standard. Geographic information. Spatial Referencing by Coordinates. Slovak Office of Standards, Metrology, and Testing: Bratislava, Slovakia, 2007; 78p.
- Weiss, G.; Labant, S.; Gasinec, J.; Stankova, H.; Cernota, P.; Weiss, E.; Weiss, R. Establishment of local geodetic networks based on least-squares adjustments of GNSS baseline vectors. Adv. Geod. Geoinf. 2022, 71, e15. [Google Scholar] [CrossRef]
- CloudCompare—3D Point Cloud and Mesh Processing Software—Open Source Project. Available online: https://www.danielgm.net/cc/ (accessed on 22 January 2023).
- OpenRail Designer CONNECT Edition From Planning to Performance. Available online: https://www.bentley.com/wp-content/uploads/PDS-OpenRail-Designer-LTR-EN-LR.pdf (accessed on 22 January 2023).
- Ramiya, A.M.; Nidamanuri, R.R.; Krishnan, R. Segmentation based building detection approach from LiDAR point cloud. Egypt. J. Remote Sens. Space Sci. 2017, 20, 71–77. [Google Scholar] [CrossRef]
- Dornaika, F.; Moujahid, A.; Merabet, E.Y.; Ruichek, Y. Building detection from orthophotos using a machine learning approach: An empirical study on image segmentation and descriptors. Expert Syst. Appl. 2016, 58, 130–142. [Google Scholar] [CrossRef]
- Malof, J.M.; Bradbury, K.; Collins, L.M.; Newell, R.G. Automatic detection of solar photovoltaic arrays in high resolution aerial imagery. Appl. Energy 2016, 183, 229–240. [Google Scholar] [CrossRef]
- Gamba, P.; Houshmand, B.; Saccani, M. Detection and extraction of buildings from interferometric SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 611–617. [Google Scholar] [CrossRef]
- Park, Y.; Guldmann, J.-M. Creating 3D city models with building footprints and LIDAR point cloud classification: A machine learning approach. Comput. Environ. Urban Syst. 2019, 75, 76–89. [Google Scholar] [CrossRef]
- Yalcin, G.; Selcuk, O. 3D city modelling with Oblique Photogrammetry Method. Procedia Technol. 2015, 19, 424–431. [Google Scholar] [CrossRef]
- Gergelova, M.B.; Labant, S.; Kuzevic, S.; Kuzevicova, Z.; Pavolova, H. Identification of Roof Surfaces from LiDAR Cloud Points by GIS Tools: A Case Study of Lučenec, Slovakia. Sustainability 2020, 12, 6847. [Google Scholar] [CrossRef]
- Redweik, P.; Catita, C.; Brito, M. Solar energy potential on roofs and facades in an urban landscape. Sol. Energy 2013, 97, 332–341. [Google Scholar] [CrossRef]
- Tiwari, A.; Meir, I.A.; Karnieli, A. Object-Based Image Procedures for Assessing the Solar Energy Photovoltaic Potential of Heterogeneous Rooftops Using Airborne LiDAR and Orthophoto. Remote Sens. 2020, 12, 223. [Google Scholar] [CrossRef]
- Tang, L.; Li, L.; Ying, S.; Lei, Y. A Full Level-of-Detail Specification for 3D Building Models Combining Indoor and Outdoor Scenes. ISPRS Int. J. Geo-Inf. 2018, 7, 419. [Google Scholar] [CrossRef]
- Gergelova, M.B.; Kuzevicova, Z.; Labant, S.; Kuzevic, S.; Bobikova, D.; Mizak, J. Roof’s Potential and Suitability for PV Systems Based on LiDAR: A Case Study of Komárno, Slovakia. Sustainability 2020, 12, 10018. [Google Scholar] [CrossRef]
- Biljecki, F.; LeDoux, H.; Stoter, J. An Improved LOD Specification for 3D Building Models. Comput. Environ. Urban Syst. 2016, 59, 25–37. [Google Scholar] [CrossRef]
- Scalable Terrain Model Overview. Available online: https://communities.bentley.com/products/3d_imaging_and_point_cloud_software/w/wiki/24963/scalable-terrain-model-overview (accessed on 22 January 2023).
- Zheng, Y.; Weng, Q.; Zheng, Y. A Hybrid Approach for Three-Dimensional Building Reconstruction in Indianapolis from LiDAR Data. Remote Sens. 2017, 9, 310. [Google Scholar] [CrossRef]
- Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2013, 79, 29–43. [Google Scholar] [CrossRef]
- Yanwen, L.; Jiang, H.; Yuting, H. A rule-based city modeling method for supporting district protective planning. Sustain. Cities Soc. 2017, 28, 277–286. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Territorial Classification | |
| Region | Trenčín |
| District | Trenčín |
| Village | Horné Srnie |
| Cadastral unit | Horné Srnie (27.26 km2) |
| Number of inhabitants in the village | 2728 |
| Population density | 100 inhabitants/km2 |
| Geomorphological classification | |
| Geomorphological system | Alps–Himalaya |
| Geomorphological subsystem | Carpathian Mountains |
| Geomorphological province | Western Carpathians |
| Geomorphological subprovince | Outer Western Carpathians |
| Geomorphological area | Slovak-Moravian Carpathians |
| Geomorphological unit | White Carpathians and Váh Valley Land |
| Regional geological division | Flysch and Klippen belt |
| Dataset | Release Date | Format | System | EPSG Code | Characteristics of the Study Area |
|---|---|---|---|---|---|
| LiDAR point cloud | 2017 XI.–2018 IV. | *.las | Coordinate: D–UTCN (UTCN03) Height: BVD–AA | 8353 3046 | Absolute altitude accuracy of cloud points: 0.06 m Absolute position accuracy of cloud points: 0.15 m Average point density (last reflection): 31 pt/m2 Average point spacing: 0.18 m |
| Orthophoto mosaic (western part of Slovakia) | 2020 | *.tiff *.tfw *.wms | Coordinate: D–UTCN (UTCN) | 5514 | Ground Sampling Distance: 20 cm/pixel Absolute position accuracy: RMSExy = 0.20 m CE95 = 1.7308 × RMSExy = 0.34 m |
| ZBGIS Buildings | 2005–2018 | *.wms *.shp | Coordinate: D–UTCN (UTCN) | 5514 | Position & altitude accuracy code: 1—Geodetic (<0.1 m), 2—Photogr. (<1 m) 3—Photogr. (<5 m), 4—Photogr. on relief (<1 m) 997 = Estimated height (>5 m) |
| Real Estate Cadaster | 2024 IV. | *.wms *.shp *.vgi | Coordinate: D–UTCN (UTCN) | 5513 | Vector cadastral map The set of geodetic information. Absolute position accuracy < 0.1 m. |
| Classification Value | Classification Meaning | Score | Share in % | Color |
|---|---|---|---|---|
| 1 | Unassigned | 585,528 | 0.749 |  |
| 2 | Ground | 34,511,358 | 44.169 |  |
| 3 | Low vegetation | 2,625,485 | 3.360 |  |
| 4 | Medium vegetation | 7,794,888 | 9.976 |  |
| 5 | High vegetation | 30,957,275 | 39.620 |  |
| 6 | Building | 1,469,126 | 1.880 |  |
| 7 | Low point | 110,966 | 0.142 |  |
| 9 | Water | 64,459 | 0.082 |  |
| 17 | Bridges deck | 11,182 | 0.014 |  |
| 18 | High noise | 4956 | 0.006 |  |
| - | All points | 78,135,223 | 100% |
| Position Deviation of the Point Number [m]/Azimuth [g] | Area [m2] | Difference | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Compared Source | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | MIN | MAX | AVG | STD | |||
| Real Estate Cadaster (825.38 m2 = 825 * m2) | ZBGIS Buildings | 0.05 | 0.39 | 0.35 | 0.47 | 0.12 | 0.71 | 0.39 | 0.21 | 0.05 | 0.71 | 0.34 | 0.20 | 830.09 830 * | 4.71 5 * |
| 65.1 | 199.9 | 229.7 | 29.0 | 352.1 | 205.4 | 256.4 | 318.9 | 29.0 | 352.1 | 207.1 | |||||
| LiDAR point cloud | 0.04 | 0.42 | 0.31 | 0.16 | 0.23 | 0.30 | 0.30 | 0.04 | 0.04 | 0.42 | 0.22 | 0.13 | 828.42 828 * | 3.04 3 * | |
| 33.2 | 176.7 | 176.8 | 140.3 | 222.8 | 171.0 | 236.6 | 280.3 | 33.2 | 280.3 | 179.7 | |||||
| Geodetic measurement | 0.13 | 0.42 | 0.30 | 0.33 | 0.28 | 0.34 | 0.33 | 0.07 | 0.07 | 0.42 | 0.28 | 0.11 | 824.65 825 * | 0.80 0 * | |
| 286.3 | 184.1 | 187.2 | 167.4 | 217.6 | 182.1 | 238.7 | 234.4 | 167.4 | 286.3 | 212.2 | |||||
| Orthophoto mosaic | 0.46 | 0.04 | 0.14 | 0.31 | 0.33 | 0.14 | 0.38 | 0.52 | 0.04 | 0.52 | 0.29 | 0.16 | 828.15 828 * | 2.77 3 * | |
| 375.9 | 313.4 | 360.7 | 388.2 | 338.6 | 373.8 | 325.9 | 377.7 | 313.4 | 388.2 | 356.8 | |||||
| Number of Building: 35 | Position Deviation of Corresponding Points [m] | ||||
|---|---|---|---|---|---|
| Real Estate Cadaster | Compared Source | MIN | MAX | AVG | STD |
| ZBGIS Buildings | 0.01 | 2.25 | 0.63 | 0.37 | |
| LiDAR point cloud | 0.01 | 0.44 | 0.18 | 0.12 | |
| Geodetic measurement | 0.01 | 0.52 | 0.26 | 0.13 | |
| Orthophoto mosaic | 0.04 | 0.78 | 0.32 | 0.16 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Labant, S.; Petovsky, P.; Sustek, P.; Leicher, L. Accuracy of Determination of Corresponding Points from Available Providers of Spatial Data—A Case Study from Slovakia. Land 2024, 13, 875. https://doi.org/10.3390/land13060875
Labant S, Petovsky P, Sustek P, Leicher L. Accuracy of Determination of Corresponding Points from Available Providers of Spatial Data—A Case Study from Slovakia. Land. 2024; 13(6):875. https://doi.org/10.3390/land13060875
Chicago/Turabian StyleLabant, Slavomir, Patrik Petovsky, Pavel Sustek, and Lubomir Leicher. 2024. "Accuracy of Determination of Corresponding Points from Available Providers of Spatial Data—A Case Study from Slovakia" Land 13, no. 6: 875. https://doi.org/10.3390/land13060875
APA StyleLabant, S., Petovsky, P., Sustek, P., & Leicher, L. (2024). Accuracy of Determination of Corresponding Points from Available Providers of Spatial Data—A Case Study from Slovakia. Land, 13(6), 875. https://doi.org/10.3390/land13060875