

Deciphering Motorists’ Perceptions of Scenic Road Visual Landscapes: Integrating Binocular Simulation and Image Segmentation

Abstract
:1. Introduction
1.1. Objectivity vs. Subjectivity in Scenic Road Visual Landscape Evaluation (SRVLE)
1.2. Eye Range vs. Proportional Reality: Expressing the Visual Landscape
2. Materials and Methods
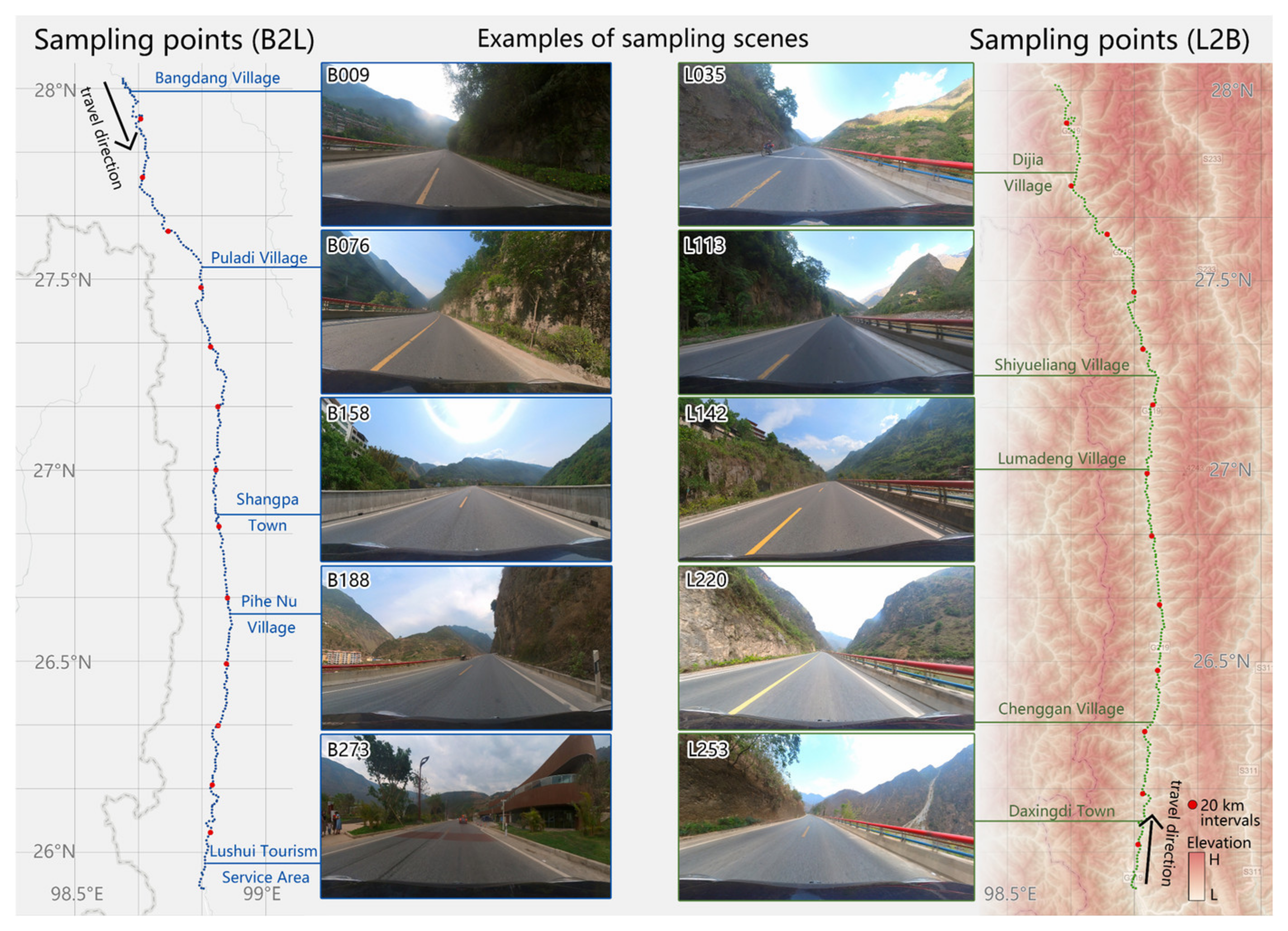
2.1. Study Area
2.2. Image Acquisition and Simulation of the Human Eye’s Field of View
2.2.1. Acquisition Equipment
2.2.2. Bidirectional Equidistant Photo Acquisition
2.2.3. Synthesis of Binocular Field of View Images
2.3. Segmentation of Visual Field Images
2.4. Constructing the SRVLE System
2.4.1. Naturalness–Artificiality (NA)
2.4.2. Diversity–Coherence (DC)
2.4.3. Openness–Deepness (OD)
3. Results
3.1. Semantic Segmentation Results
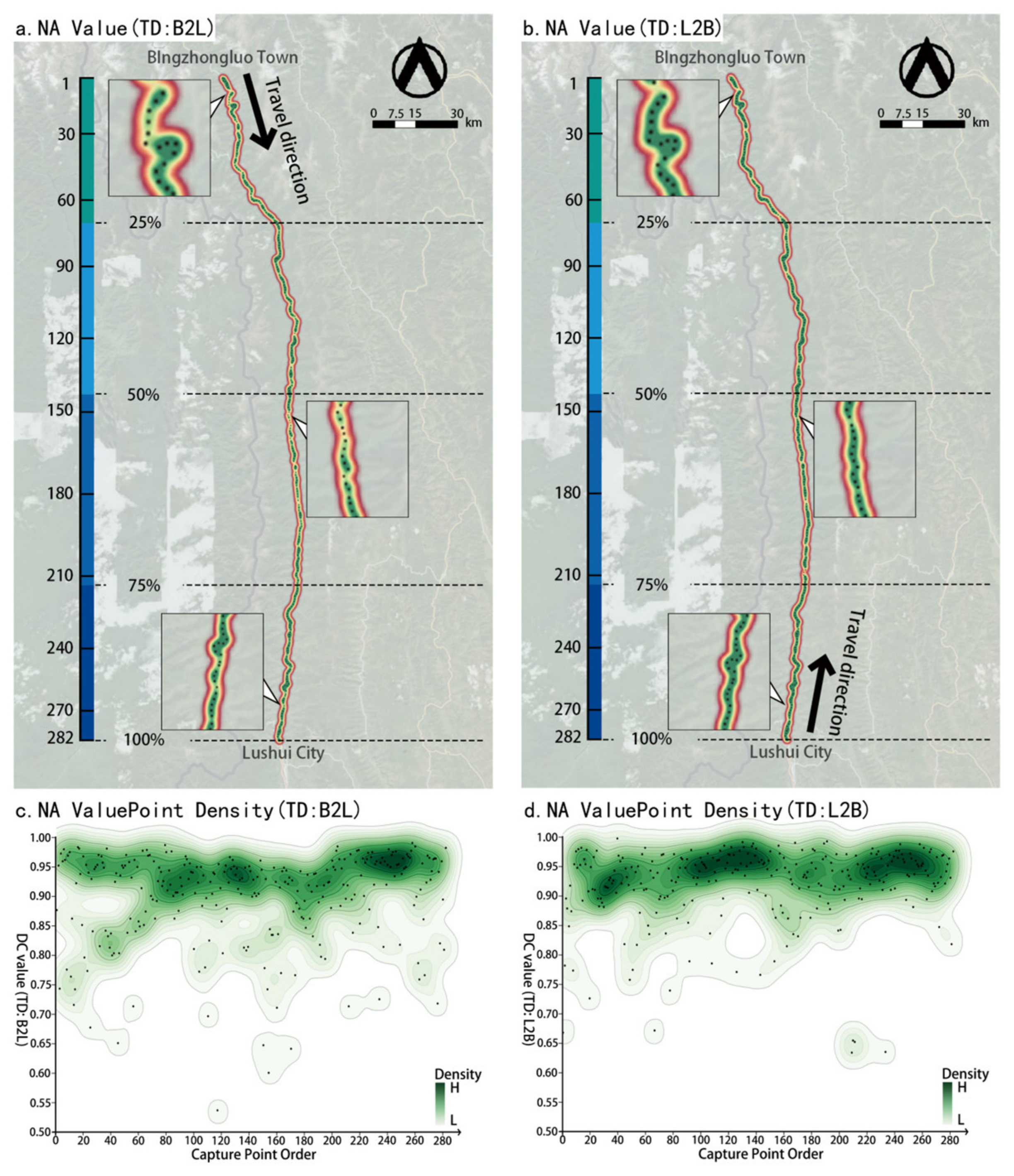
3.2. NA Evaluation
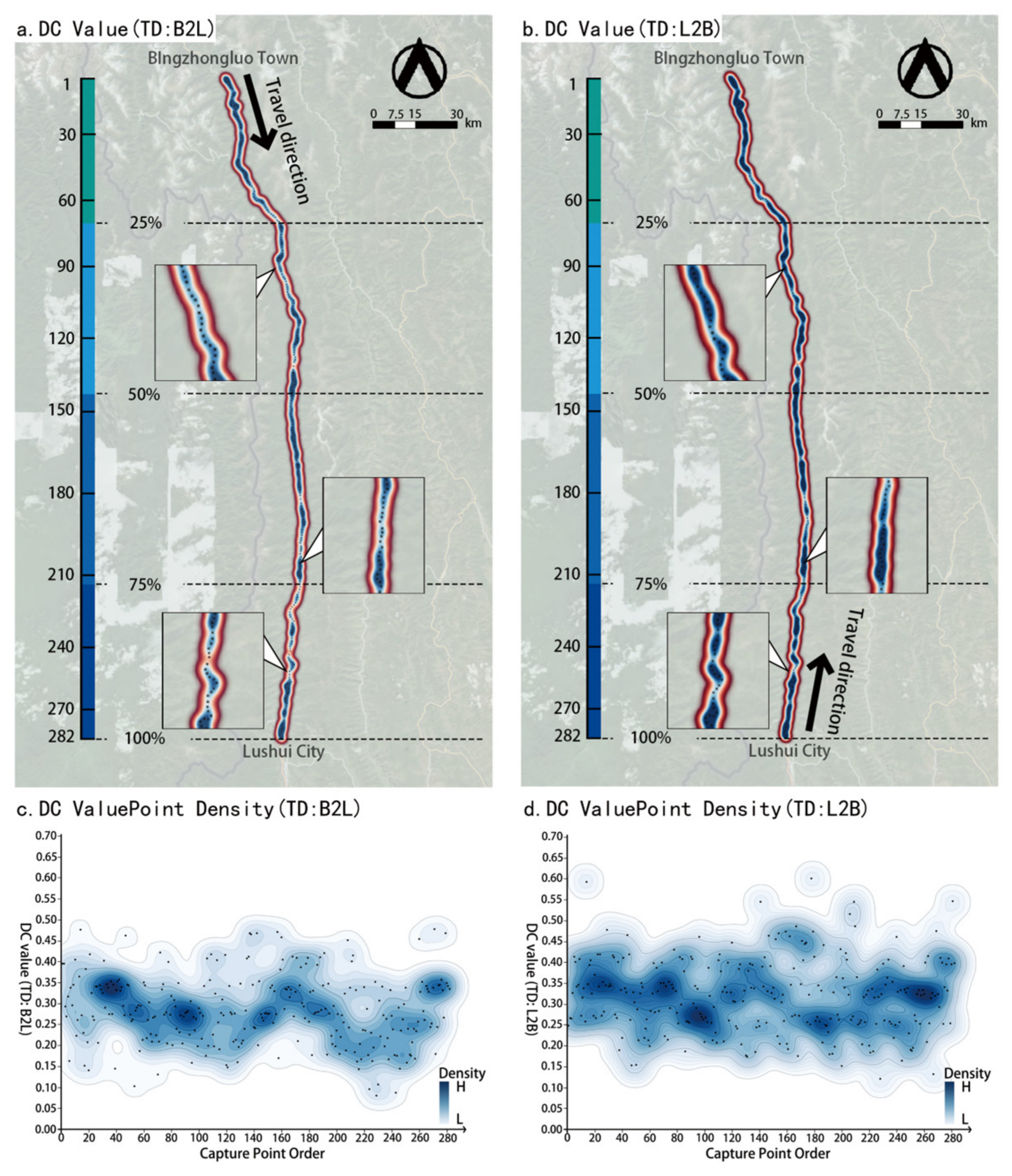
3.3. DC Evaluation
3.4. OD Evaluation
3.5. Characteristics of Extreme Value
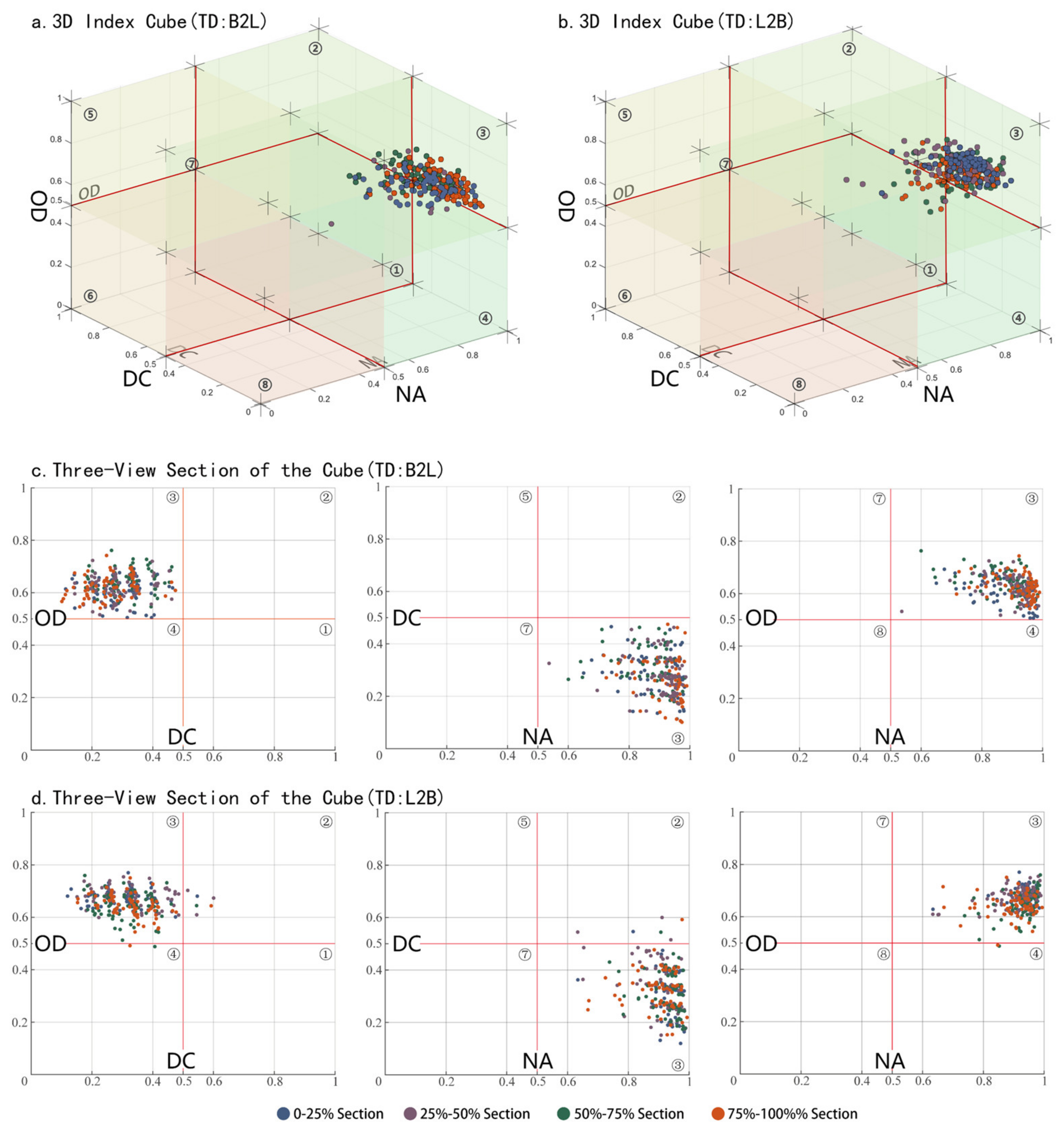
3.6. 3D Index Cube: Comprehensive Analysis of SRVLE
4. Discussion
4.1. Contributions of in Practice
4.2. Scale Effect of Bidirectional Differences
4.3. Limitations and Prospects
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Brown, G. A Method for Assessing Highway Qualities to Integrate Values in Highway Planning. J. Transp. Geogr. 2003, 11, 271–283. [Google Scholar] [CrossRef]
- Denstadli, J.M.; Jacobsen, J.K.S. The Long and Winding Roads: Perceived Quality of Scenic Tourism Routes. Tour. Manag. 2011, 32, 780–789. [Google Scholar] [CrossRef]
- Clay, G.R.; Smidt, R.K. Assessing the Validity and Reliability of Descriptor Variables Used in Scenic Highway Analysis. Landsc. Urban Plan. 2004, 66, 239–255. [Google Scholar] [CrossRef]
- Eliot, C.W. The Influence of the Automobile on the Design of Park Roads. Landsc. Archit. 1922, 13, 27–37. [Google Scholar]
- Bilberman, J.; Andereck, K.L. The Economic Value of Off-Highway Vehicle Recreation. J. Leis. Res. 2006, 38, 208–223. [Google Scholar] [CrossRef]
- Yang, X.; Yue, F.; Liu, Y.; Fan, P. Research on Evaluation Ideas and Index Construction of China’s Scenic Byway. In Proceedings of the International Conference on Frontiers of Traffic and Transportation Engineering (FTTE 2022), Lanzhou, China, 17–19 June 2022. [Google Scholar]
- Zhang, Y.; Chen, X.; Yu, R.; Cheng, J.; Yu, X. The Logic Transformation of the Scenic Byway System to the Linear Experience Space Transformation. J. Nat. Resour. 2020, 35, 284–296. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, Y. Tourism, Transport Infrastructure and Income Inequality: A Panel Data Analysis of China. Curr. Issues Tour. 2022, 25, 1607–1626. [Google Scholar] [CrossRef]
- Qin, X.; Fang, M.; Yang, D.; Wangari, V.W. Quantitative Evaluation of Attraction Intensity of Highway Landscape Visual Elements Based on Dynamic Perception. Environ. Impact Assess. Rev. 2023, 100, 107081. [Google Scholar] [CrossRef]
- Steenjacobsen, J.K. Nomadic Tourism and Fleeting Place Encounters: Exploring Different Aspects of Sightseeing. Scand. J. Hosp. Tour. 2001, 1, 99–112. [Google Scholar] [CrossRef]
- Jiang, L.; Kang, J.; Schroth, O. Prediction of the Visual Impact of Motorways Using GIS. Environ. Impact Assess. Rev. 2015, 55, 59–73. [Google Scholar] [CrossRef]
- Kang, N.; Liu, C. Towards Landscape Visual Quality Evaluation: Methodologies, Technologies, and Recommendations. Ecol. Indic. 2022, 142, 109174. [Google Scholar] [CrossRef]
- Tveit, M.; Ode, Å.; Fry, G. Key Concepts in a Framework for Analysing Visual Landscape Character. Landsc. Res. 2006, 31, 229–255. [Google Scholar] [CrossRef]
- Daniel, T.C. Whither Scenic Beauty? Visual Landscape Quality Assessment in the 21st Century. Landsc. Urban Plan. 2001, 54, 267–281. [Google Scholar] [CrossRef]
- Howley, P. Landscape Aesthetics: Assessing the General Publics’ Preferences towards Rural Landscapes. Ecol. Econ. 2011, 72, 161–169. [Google Scholar] [CrossRef]
- Palmer, J.F. A Diversity of Approaches to Visual Impact Assessment. Land 2022, 11, 1006. [Google Scholar] [CrossRef]
- Kent, R.L.; Elliott, C.L. Scenic Routes Linking and Protecting Natural and Cultural Landscape Features: A Greenway Skeleton. Landsc. Urban Plan. 1995, 33, 341–355. [Google Scholar] [CrossRef]
- Solecka, I. The Use of Landscape Value Assessment in Spatial Planning and Sustainable Land Management—A Review. Landsc. Res. 2019, 44, 966–981. [Google Scholar] [CrossRef]
- Sipes, J.L.; James, A.P.; Lindley, J.; Campbell, T.; Gragg, R.; Harbert, C. Scenic Byways: A Review of Processes, Administration, and Economic Impacts. Transp. Res. Rec. 1997, 1599, 96–103. [Google Scholar] [CrossRef]
- Zhu, G.; Zhong, P.; Luo, Y.; Yan, L.; Yang, D.; Long, W. Highway Landscape Planning Based on “3S” Technologies—Taking the Sichuan-Tibet Highway (Kanding Section) as an Example. 2015, pp. 2787–2798. Available online: https://ascelibrary.org/doi/abs/10.1061/9780784479384.356 (accessed on 13 June 2024).
- Palmer, J.F.; Hoffman, R.E. Rating Reliability and Representation Validity in Scenic Landscape Assessments. Landsc. Urban Plan. 2001, 54, 149–161. [Google Scholar] [CrossRef]
- Otero Pastor, I.; Casermeiro Martínez, M.A.; Ezquerra Canalejoa, A.; Esparcia Mariño, P. Landscape Evaluation: Comparison of Evaluation Methods in a Region of Spain. J. Environ. Manag. 2007, 85, 204–214. [Google Scholar] [CrossRef]
- Crawford, D. Using Remotely Sensed Data in Landscape Visual Quality Assessment. Landsc. Urban Plan. 1994, 30, 71–81. [Google Scholar] [CrossRef]
- Sahle, M.; Saito, O. Mapping and Characterizing the Jefoure Roads That Have Cultural Heritage Values in the Gurage Socio-Ecological Production Landscape of Ethiopia. Landsc. Urban Plan. 2021, 210, 104078. [Google Scholar] [CrossRef]
- Martín, B.; Ortega, E.; Otero, I.; Arce, R.M. Landscape Character Assessment with GIS Using Map-Based Indicators and Photographs in the Relationship between Landscape and Roads. J. Environ. Manag. 2016, 180, 324–334. [Google Scholar] [CrossRef]
- Anderson, C.C.; Rex, A. Preserving the Scenic Views from North Carolina’s Blue Ridge Parkway: A Decision Support System for Strategic Land Conservation Planning. Appl. Geogr. 2019, 104, 75–82. [Google Scholar] [CrossRef]
- Palmer, J.F. The Contribution of a GIS-Based Landscape Assessment Model to a Scientifically Rigorous Approach to Visual Impact Assessment. Landsc. Urban Plan. 2019, 189, 80–90. [Google Scholar] [CrossRef]
- Blumentrath, C.; Tveit, M.S. Visual Characteristics of Roads: A Literature Review of People’s Perception and Norwegian Design Practice. Transp. Res. Part Policy Pract. 2014, 59, 58–71. [Google Scholar] [CrossRef]
- Hunziker, M.; Felber, P.; Gehring, K.; Buchecker, M.; Bauer, N.; Kienast, F. Evaluation of Landscape Change by Different Social Groups. Mt. Res. Dev. 2008, 28, 140–147. [Google Scholar] [CrossRef]
- Scott, A. Assessing Public Perception of Landscape: The LANDMAP Experience. Landsc. Res. 2002, 27, 271–295. [Google Scholar] [CrossRef]
- Frank, S.; Fürst, C.; Koschke, L.; Witt, A.; Makeschin, F. Assessment of Landscape Aesthetics—Validation of a Landscape Metrics-Based Assessment by Visual Estimation of the Scenic Beauty. Ecol. Indic. 2013, 32, 222–231. [Google Scholar] [CrossRef]
- Ribe, R. Exploring Psychophysical Measurement in Landscape Aesthetics: Validity, Reliability and Signal Detection via Single-versus Opposing-Construct Rating Scales, with or without Zeros. J. Environ. Psychol. 2022, 83, 101862. [Google Scholar] [CrossRef]
- Matijošaitienė, I.; Stankevičė, I. Road Landscape as a Product: Does It Satisfy Consumers’ Aesthetic Needs? Balt. J. Road Bridge Eng. 2014, 9, 297–305. [Google Scholar] [CrossRef]
- Symonds, P.M. On the Loss of Reliability in Ratings Due to Coarseness of the Scale. J. Exp. Psychol. 1924, 7, 456–461. [Google Scholar] [CrossRef]
- Terkenli, T.S.; Gkoltsiou, A.; Kavroudakis, D. The Interplay of Objectivity and Subjectivity in Landscape Character Assessment: Qualitative and Quantitative Approaches and Challenges. Land 2021, 10, 53. [Google Scholar] [CrossRef]
- Biljecki, F.; Ito, K. Street View Imagery in Urban Analytics and GIS: A Review. Landsc. Urban Plan. 2021, 215, 104217. [Google Scholar] [CrossRef]
- Ma, X.; Ma, C.; Wu, C.; Xi, Y.; Yang, R.; Peng, N.; Zhang, C.; Ren, F. Measuring Human Perceptions of Streetscapes to Better Inform Urban Renewal: A Perspective of Scene Semantic Parsing. Cities 2021, 110, 103086. [Google Scholar] [CrossRef]
- Steen Jacobsen, J.K. Use of Landscape Perception Methods in Tourism Studies: A Review of Photo-Based Research Approaches. Tour. Geogr. 2007, 9, 234–253. [Google Scholar] [CrossRef]
- Banks, M.S.; Cooper, E.A.; Piazza, E.A. Camera Focal Length and the Perception of Pictures. Ecol. Psychol. 2014, 26, 30–46. [Google Scholar] [CrossRef]
- Cooper, E.A.; Piazza, E.A.; Banks, M.S. The Perceptual Basis of Common Photographic Practice. J. Vis. 2012, 12, 8. [Google Scholar] [CrossRef]
- Hammitt, W.E.; Patterson, M.E.; Noe, F.P. Identifying and Predicting Visual Preference of Southern Appalachian Forest Recreation Vistas. Landsc. Urban Plan. 1994, 29, 171–183. [Google Scholar] [CrossRef]
- Sevenant, M.; Antrop, M. Landscape Representation Validity: A Comparison between On-Site Observations and Photographs with Different Angles of View. Landsc. Res. 2011, 36, 363–385. [Google Scholar] [CrossRef]
- Stewart, T.R.; Middleton, P.; Downton, M.; Ely, D. Judgments of Photographs vs. Field Observations in Studies of Perception and Judgment of the Visual Environment. J. Environ. Psychol. 1984, 4, 283–302. [Google Scholar] [CrossRef]
- Xiang, Y.; Liang, H.; Fang, X.; Chen, Y.; Xu, N.; Hu, M.; Chen, Q.; Mu, S.; Hedblom, M.; Qiu, L.; et al. The Comparisons of On-Site and off-Site Applications in Surveys on Perception of and Preference for Urban Green Spaces: Which Approach Is More Reliable? Urban For. Urban Green. 2021, 58, 126961. [Google Scholar] [CrossRef]
- Chen, G.; Yan, J.; Wang, C.; Chen, S. Expanding the Associations between Landscape Characteristics and Aesthetic Sensory Perception for Traditional Village Public Space. Forests 2024, 15, 97. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Jiang, X.; Han, J.; Wang, Z.; Wu, D.; Lin, Q.; Li, L.; Zhang, S.; Dong, Y. Prediction of Riverside Greenway Landscape Aesthetic Quality of Urban Canalized Rivers Using Environmental Modeling. J. Clean. Prod. 2022, 367, 133066. [Google Scholar] [CrossRef]
- Long, K.; Wang, N.; Lin, Z. Assessing Scenic Beauty of Hilly and Mountain Villages: An Approach Based on Landscape Indicators. Ecol. Indic. 2023, 154, 110538. [Google Scholar] [CrossRef]
- Guan, F.; Fang, Z.; Wang, L.; Zhang, X.; Zhong, H.; Huang, H. Modelling People’s Perceived Scene Complexity of Real-World Environments Using Street-View Panoramas and Open Geodata. ISPRS J. Photogramm. Remote Sens. 2022, 186, 315–331. [Google Scholar] [CrossRef]
- Li, Y.; Yabuki, N.; Fukuda, T. Measuring Visual Walkability Perception Using Panoramic Street View Images, Virtual Reality, and Deep Learning. Sustain. Cities Soc. 2022, 86, 104140. [Google Scholar] [CrossRef]
- Gao, S.; Yang, K.; Shi, H.; Wang, K.; Bai, J. Review on Panoramic Imaging and Its Applications in Scene Understanding. IEEE Trans. Instrum. Meas. 2022, 71, 1–34. [Google Scholar] [CrossRef]
- Pardo-García, S.; Mérida-Rodríguez, M. Measurement of Visual Parameters of Landscape Using Projections of Photographs in GIS. Comput. Environ. Urban Syst. 2017, 61, 56–65. [Google Scholar] [CrossRef]
- Kang, Y.; Kim, J.; Park, J.; Lee, J. Assessment of Perceived and Physical Walkability Using Street View Images and Deep Learning Technology. ISPRS Int. J. Geo-Inf. 2023, 12, 186. [Google Scholar] [CrossRef]
- Gandy, R.; Meitner, M.J. The Effects of an Advanced Traveler Information System on Scenic Beauty Ratings and the Enjoyment of a Recreational Drive. Landsc. Urban Plan. 2007, 82, 85–93. [Google Scholar] [CrossRef]
- Portman, M.E.; Natapov, A.; Fisher-Gewirtzman, D. To Go Where No Man Has Gone before: Virtual Reality in Architecture, Landscape Architecture and Environmental Planning. Comput. Environ. Urban Syst. 2015, 54, 376–384. [Google Scholar] [CrossRef]
- Qi, J.; Tang, X. Interacting with Landscapes beyond the Windshield: Affordances Actualisation on Scenic Road Rest Areas along the Nujiang Beautiful Road in China. Landsc. Res. 2024, 49, 1–17. [Google Scholar] [CrossRef]
- Guitton, D.; Volle, M. Gaze Control in Humans: Eye-Head Coordination during Orienting Movements to Targets within and beyond the Oculomotor Range. J. Neurophysiol. 1987, 58, 427–459. [Google Scholar] [CrossRef]
- Yao, X.; Toslak, D.; Son, T.; Ma, J. Understanding the Relationship between Visual-Angle and Eye-Angle for Reliable Determination of the Field-of-View in Ultra-Wide Field Fundus Photography. Biomed. Opt. Express 2021, 12, 6651–6659. [Google Scholar] [CrossRef] [PubMed]
- Ruch, T.C.; Fulton, J.F. Medical Physiology and Biophysics. Acad. Med. 1960, 35, 1067. [Google Scholar]
- Jiang, J.; Brack, C.; Coe, R.; Gibbons, P. Rapidly Quantifying Interior Greenery Using 360° Panoramic Images. Forests 2022, 13, 602. [Google Scholar] [CrossRef]
- Jo, H.I.; Jeon, J.Y. Overall Environmental Assessment in Urban Parks: Modelling Audio-Visual Interaction with a Structural Equation Model Based on Soundscape and Landscape Indices. Build. Environ. 2021, 204, 108166. [Google Scholar] [CrossRef]
- Guiducci, D.; Burke, A. Reading the Landscape: Legible Environments and Hominin Dispersals. Evol. Anthropol. Issues News Rev. 2016, 25, 133–141. [Google Scholar] [CrossRef]
- Ogburn, D.E. Assessing the Level of Visibility of Cultural Objects in Past Landscapes. J. Archaeol. Sci. 2006, 33, 405–413. [Google Scholar] [CrossRef]
- Guo, J.; He, H.; He, T.; Lausen, L.; Li, M.; Lin, H.; Shi, X.; Wang, C.; Xie, J.; Zha, S.; et al. GluonCV and GluonNLP: Deep Learning in Computer Vision and Natural Language Processing. J. Mach. Learn. Res. 2020, 21, 1–7. [Google Scholar]
- Zhu, J.; Li, B.; Ouyang, H.; Wang, Y.; Bai, Z. Understanding Urban Residents’ Walking Exercise Preferences: An Empirical Study Using Street View Images and Trajectory Data. Buildings 2024, 14, 549. [Google Scholar] [CrossRef]
- Ode, Å.; Tveit, M.S.; Fry, G. Advantages of Using Different Data Sources in Assessment of Landscape Change and Its Effect on Visual Scale. Ecol. Indic. 2010, 10, 24–31. [Google Scholar] [CrossRef]
- Smardon, R.C. Visual Impact Assessment: Where Have We Come from and Where Are We Going? J. Environ. Prot. 2016, 7, 1333–1341. [Google Scholar] [CrossRef]
- Farber, M.E.; Hall, T.E. Emotion and Environment: Visitors’ Extraordinary Experiences along the Dalton Highway in Alaska. J. Leis. Res. 2007, 39, 248–270. [Google Scholar] [CrossRef]
- Mehmetoglu, M.; Normann, Ø. The Link between Travel Motives and Activities in Nature-based Tourism. Tour. Rev. 2013, 68, 3–13. [Google Scholar] [CrossRef]
- Carver, S.; Comber, A.; McMorran, R.; Nutter, S. A GIS Model for Mapping Spatial Patterns and Distribution of Wild Land in Scotland. Landsc. Urban Plan. 2012, 104, 395–409. [Google Scholar] [CrossRef]
- Thiffault, P.; Bergeron, J. Monotony of Road Environment and Driver Fatigue: A Simulator Study. Accid. Anal. Prev. 2003, 35, 381–391. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Gao, Z.; Luo, P.; Duan, W.; Hu, M.; Mohd Arif Zainol, M.R.R.; Zawawi, M.H. The Influence of Visual Landscapes on Road Traffic Safety: An Assessment Using Remote Sensing and Deep Learning. Remote Sens. 2023, 15, 4437. [Google Scholar] [CrossRef]
- Yue, Z.; Zhong, Y.; Cui, Z. Respondent Dynamic Attention to Streetscape Composition in Nanjing, China. Sustainability 2022, 14, 15209. [Google Scholar] [CrossRef]
- Zhao, J.; Wu, J.; Wang, H. Characteristics of Urban Streets in Relation to Perceived Restorativeness. J. Expo. Sci. Environ. Epidemiol. 2020, 30, 309–319. [Google Scholar] [CrossRef]
- Antrop, M.; Van Eetvelde, V. Holistic Aspects of Suburban Landscapes: Visual Image Interpretation and Landscape Metrics. Landsc. Urban Plan. 2000, 50, 43–58. [Google Scholar] [CrossRef]
- Stamps, A.E., III. Entropy, Visual Diversity, and Preference. J. Gen. Psychol. 2002, 129, 300–320. [Google Scholar] [CrossRef] [PubMed]
- Jost, L. Entropy and Diversity. Oikos 2006, 113, 363–375. [Google Scholar] [CrossRef]
- Rocchini, D.; Delucchi, L.; Bacaro, G.; Cavallini, P.; Feilhauer, H.; Foody, G.M.; He, K.S.; Nagendra, H.; Porta, C.; Ricotta, C.; et al. Calculating Landscape Diversity with Information-Theory Based Indices: A GRASS GIS Solution. Ecol. Inform. 2013, 17, 82–93. [Google Scholar] [CrossRef]
- Juhász-Nagy, P. Notes on Compositional Diversity. In Proceedings of the Intermediate Disturbance Hypothesis in Phytoplankton Ecology; Padisák, J., Reynolds, C.S., Sommer, U., Eds.; Springer: Dordrecht, The Netherlands, 1993; pp. 173–182. [Google Scholar]
- Konrád, K.D.; Bede-Fazekas, Á.; Bartha, S.; Somodi, I. Adapting a Multiscale Approach to Assess the Compositional Diversity of Landscapes. Landsc. Ecol. 2023, 38, 2731–2747. [Google Scholar] [CrossRef]
- Han, X.; Wang, L.; Seo, S.H.; He, J.; Jung, T. Measuring Perceived Psychological Stress in Urban Built Environments Using Google Street View and Deep Learning. Front. Public Health 2022, 10, 891736. [Google Scholar] [CrossRef]
- Yu, X.; Ma, J.; Tang, Y.; Yang, T.; Jiang, F. Can We Trust Our Eyes? Interpreting the Misperception of Road Safety from Street View Images and Deep Learning. Accid. Anal. Prev. 2024, 197, 107455. [Google Scholar] [CrossRef]
- Turner, M.G.; O’Neill, R.V.; Gardner, R.H.; Milne, B.T. Effects of Changing Spatial Scale on the Analysis of Landscape Pattern. Landsc. Ecol. 1989, 3, 153–162. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | B2L | L2B | |||||
|---|---|---|---|---|---|---|---|
| Category | Types | Min/Max | Mean | SD | Min/Max | Mean | SD |
| Natural | Tree | 0.0002/0.4109 | 0.1015 | 0.0870 | 0.0000/0.3792 | 0.0846 | 0.0671 |
| Shrub | 0.0000/0.1159 | 0.0095 | 0.0181 | 0.0000/0.1680 | 0.0083 | 0.0130 | |
| Mountain | 0.0001/0.4341 | 0.2010 | 0.1043 | 0.0222/0.4980 | 0.1894 | 0.0724 | |
| Bare land | 0.0000/0.0831 | 0.0038 | 0.0119 | 0.0000/0.0640 | 0.0026 | 0.0079 | |
| Sky | 0.1017/0.3725 | 0.2388 | 0.0472 | 0.0778/0.3540 | 0.2735 | 0.0406 | |
| Water | 0.0000/0.0279 | 0.0005 | 0.0030 | 0.0000/0.0725 | 0.0043 | 0.0093 | |
| Artificial | Road | 0.3218/0.4465 | 0.3827 | 0.0180 | 0.3122/0.4437 | 0.3863 | 0.0241 |
| Building | 0.0000/0.2096 | 0.0082 | 0.0259 | 0.0000/0.1984 | 0.0106 | 0.0310 | |
| Wall | 0.0000/0.1830 | 0.0260 | 0.0331 | 0.0000/0.2441 | 0.0204 | 0.0226 | |
| Fence | 0.0000/0.0853 | 0.0103 | 0.0095 | 0.0000/0.0561 | 0.0085 | 0.0095 | |
| Bridge | 0.0000/0.0000 | 0.0000 | 0.0000 | 0.0000/0.0215 | 0.0001 | 0.0013 | |
| Sign | 0.0000/0.0462 | 0.0009 | 0.0040 | 0.0000/0.0222 | 0.0006 | 0.0026 | |
| Pole/tower | 0.0000/0.0512 | 0.0007 | 0.0042 | 0.0000/0.0246 | 0.0006 | 0.0031 | |
| Exclusions | Vehicle | 0.0000/0.0711 | 0.0013 | 0.0067 | 0.0000/0.0366 | 0.0052 | 0.0037 |
| Unidentified | 0.0001/0.0579 | 0.0147 | 0.0122 | 0.0000/0.0477 | 0.0095 | 0.0063 | |
| Road Direction | Min | Max | Mean | ||||
|---|---|---|---|---|---|---|---|
| Total | 0–25% Section | 25–50% Section | 50–75% Section | 75–100% Section | |||
| B2L | 0.5366 | 0.9897 | 0.8994 | 0.8894 | 0.9042 | 0.8816 | 0.9228 |
| L2B | 0.6334 | 0.9932 | 0.9105 | 0.8970 | 0.9125 | 0.9019 | 0.9305 |
| Road Direction | Elements per Image (Mean) | Mean | ||||
|---|---|---|---|---|---|---|
| Total | 0–25% Section | 25–50% Section | 50–75% Section | 75–100% Section | ||
| B2L | 6.2545 | 0.2839 | 0.2926 | 0.2793 | 0.3082 | 0.2549 |
| L2B | 6.7929 | 0.3198 | 0.3267 | 0.3081 | 0.3375 | 0.3057 |
| Road Direction | Min | Max | Mean | ||||
|---|---|---|---|---|---|---|---|
| Total | 0–25% Section | 25–50% Section | 50–75% Section | 75–100% Section | |||
| B2L | 0.5051 | 0.7616 | 0.6215 | 0.6036 | 0.6176 | 0.6431 | 0.6213 |
| L2B | 0.4883 | 0.7700 | 0.6599 | 0.6421 | 0.6437 | 0.6742 | 0.6784 |
| Road Direction | Tree | Mountain | Building |
|---|---|---|---|
| B2L | −0.361 ** | −0.432 ** | 0.253 * |
| L2B | −0.676 ** | −0.230 * | 0.257 * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Z.; Ji, R.; Qi, J. Deciphering Motorists’ Perceptions of Scenic Road Visual Landscapes: Integrating Binocular Simulation and Image Segmentation. Land 2024, 13, 1381. https://doi.org/10.3390/land13091381
Bai Z, Ji R, Qi J. Deciphering Motorists’ Perceptions of Scenic Road Visual Landscapes: Integrating Binocular Simulation and Image Segmentation. Land. 2024; 13(9):1381. https://doi.org/10.3390/land13091381
Chicago/Turabian StyleBai, Zhaocheng, Rui Ji, and Jun Qi. 2024. "Deciphering Motorists’ Perceptions of Scenic Road Visual Landscapes: Integrating Binocular Simulation and Image Segmentation" Land 13, no. 9: 1381. https://doi.org/10.3390/land13091381
APA StyleBai, Z., Ji, R., & Qi, J. (2024). Deciphering Motorists’ Perceptions of Scenic Road Visual Landscapes: Integrating Binocular Simulation and Image Segmentation. Land, 13(9), 1381. https://doi.org/10.3390/land13091381